- Замена устаревших электродвигателей на современные энергоэффективные
- Статьи на данную тему:
- Чем асинхронные двигатели отличаются от синхронных
- Синхронный и асинхронный двигатель отличия
- Подписка на рассылку
- Синхронный и асинхронный двигатель – отличия для чайников
- Асинхронный двигатель
- Синхронный двигатель
- Недостатки и преимущества двигателей
Замена устаревших электродвигателей на современные энергоэффективные
| Рубрика: | Экономия электрической энергии При потреблении. |
| Классификация технологии: | Организационный. |
| Статус рассмотрения проекта Координационным Советом: | Не рассматривался. |
| Объекты внедрения: | Промышленность, Прочее, Насосные станции, Котельные, РТС, КТС, ТЭЦ, Тепловые сети, в т.ч. системы ГВС. |
| Эффект от внедрения: | — для объекта: экономия электроэнергии, повышение надежности и долговечности работы оборудования, снижение эксплуатационных затрат; — для муниципального образования: высвобождение дополнительной мощности. |
На предприятиях должны планомерно проводиться работы по модернизации и замене морально устаревшего оборудования, в частности, по замене неэкономичных электродвигателей на электродвигатели новых серий, отвечающих современным требованиям энергоэффективности.
Для принятия решения о замене оборудования необходимо провести обследование технического состояния электродвигателей механизмов, проанализировать режимы работы, реальные загрузки и условия эксплуатации электродвигателей, а также разработать рекомендации по совершенствованию методов их эксплуатации и повышению эксплуатационной надежности.
Необходимо также оценить возможность и целесообразность применения регулируемых электроприводов для конкретных механизмов.
Желательно принять участие в приемке на заводе-изготовителе новых электродвигателей (согласно разработанному проекту), а также провести экспериментальное исследование их характеристик на месте установки.
Рекомендации по выбору вида, типа и мощности двигателя электропривода
Задача выбора электродвигателя (постоянного тока, асинхронного, синхронного) при работе с длительной постоянной нагрузкой относительно проста — рекомендуется применять синхронные двигатели. Это объясняется тем, что современный синхронный двигатель пускается в ход также быстро, как и асинхронный, а его габариты меньше и работа экономичнее, чем асинхронного двигателя той же мощности (у синхронного двигателя больше максимальный момент Mmax на валу и выше коэффициент мощности cosφ).
При этом у асинхронных двигателей последнего поколения с помощью специальных устройств управления можно достаточно эффективно регулировать скорость вращения, осуществлять реверс с необходимым моментом для работы электропривода.
При выборе вида двигателя привода, который должен работать в условиях регулируемой частоты вращения реверса, больших изменений нагрузки, частых пусков, необходимо сопоставить условия работы электропривода с особенностями механических характеристик различных видов электродвигателей.
Наиболее надежным, экономичным и простым в эксплуатации при частых пусках и непостоянной нагрузке является асинхронный двигатель с короткозамкнутым ротором. Если невозможно применить коротко-замкнутый асинхронный двигатель, например, при больших мощностях, устанавливается асинхронный двигатель с фазным ротором.
Из-за наличия коллекторно-щеточного узла двигатель постоянного тока сложнее по конструкции и выше по стоимости, чем двигатель переменного тока, требует более тщательного ухода в эксплуатации и изнашивается быстрее. Однако, иногда, предпочтение отдается двигателю постоянного тока, который позволяет простыми средствами изменить частоту вращения электропривода в широком диапазоне.
Тип двигателя (его конструкцию) выбирают в зависимости от условий окружающей среды. При наличии взрывоопасной атмосферы необходимо обеспечить ее защиту от возможных искрообразований в двигателе. Непосредственно сами двигатели должны быть защищены от попадания в них пыли, влаги, химических веществ из окружающей среды.
Очень часто возникает необходимость в регулировании скорости вращения ротора двигателя.
Существует два надежных метода (но существенно несовершенных) для регулирования частоты вращения двигателя.
- переключение числа пар полюсов обмотки статора;
- включение резисторов в цепи якорных обмоток ротора.
Первый метод обеспечивает лишь дискретное (ступенчатое) регулирование и практически применяется, в основном, для маломощных приводов, а второй рационален лишь при узких пределах регулирования при постоянстве момента на валу двигателя.
Благодаря появлению в последнее время мощных полупроводниковых приборов положение в этой области существенно изменилось. Современные электронные преобразователи позволяют изменять частоту переменного тока в широком диапазоне, что дает возможность плавно регулировать скорость вращающегося магнитного поля, а, следовательно, эффективно регулировать частоту вращения синхронного и асинхронного двигателей.
Электродвигатель с оптимально выбранной мощностью для привода должен обеспечивать:
- надежность в работе;
- экономичность в эксплуатации;
- возможность работоспособного состояния в различных условиях.
Установка электродвигателя меньшей мощности, чем это необходимо по условиям работы привода, снижает производительность электропривода и делает его работу ненадежной. При этом сам электродвигатель в подобных условиях может быть поврежден.
Установка двигателя завышенной мощности вызывает излишние потери энергии при работе электрической машины, обуславливает дополнительные капитальные вложения, увеличение массы и габаритов двигателя.
Двигатель должен нормально работать при возможных временных перегрузках и развивать пусковой момент на валу тот, который требуется для нормального функционирования исполнительного механизма. Во время работы двигатель не должен нагреваться до предельно допустимой температуры, в крайнем случае, на очень непродолжительное время. Поэтому в большинстве случаев мощность двигателя выбирается на основании условий нагревания до предельно допустимой температуры (так называемый выбор мощности по нагреву).
Затем осуществляется проверка соответствия перегрузочной способности двигателя условиям пуска машины и временным перегрузкам. Иногда, при большой кратковременной перегрузке, приходится выбирать двигатель, исходя из требуемой максимальной мощности. В подобных условиях максимальная мощность двигателя длительное время, как правило, не используется.
Для привода с продолжительным режимом работы при постоянной или незначительно меняющейся нагрузке мощность двигателя должна быть равна мощности нагрузки, а проверки на перегрев и перегрузку во время работы электропривода не нужны (это объясняется изначально определенными условиями работы электродвигателя). Однако необходимо проверить, достаточен ли пусковой момент на валу двигателя для пусковых условий данной электрической машины.
Статьи на данную тему:
Здесь мы можем разместить контактную информацию о Вашей компании и ссылку на Ваш сайт
Как разместить контактную информацию
Для того чтобы добавить описание энергосберегающей технологии в Каталог, заполните опросник и вышлите его на c пометкой «в Каталог».
 Скачать опросник
Скачать опросник
Чем асинхронные двигатели отличаются от синхронных
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.
Асинхронные электродвигатели более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. Электродвигателем называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными — притягиваются. Это постоянные магниты. Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
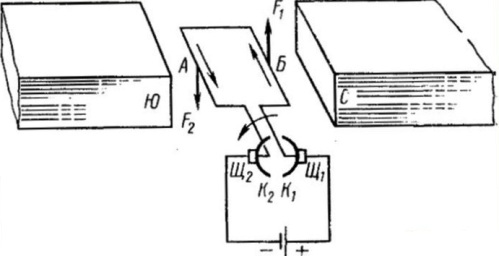
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (Сила Ампера), пока не будет достигнуто равновесие в вертикальном положении.
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
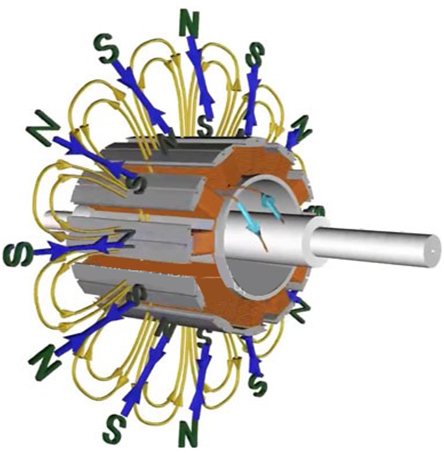
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
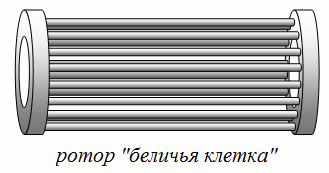
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.
Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.

Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, — все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.
Синхронные электродвигатели широко применяются в электроприводах, не требующих регулирования частоты вращения. По сравнению с асинхронными двигателями они имеют ряд преимуществ:
более высокий коэффициент полезного действия;
возможность изготовления двигателей с низкой частотой вращения, что позволяет отказаться от промежуточных передач между двигателем и рабочей машиной;
частота вращения двигателя не зависит от нагрузки па его валу;
возможность использования в качестве компенсирующих устройств реактивной мощности.
Синхронные электродвигатели могут являться потребителями и генераторами реактивной мощности. Характер и значение реактивной мощности синхронного двигателя зависят от величины тока в обмотке возбуждения. Зависимость тока в обмотке, выдающей напряжение в электрическую сеть, от тока возбуждения носит название U-образной характеристики синхронного двигателя. При 100%-ной нагрузке на валу двигателя его косинус фи равен 1. При этом электродвигатель не потребляет реактивной мощности из электрической сети. Ток в обмотке статора при этом имеет минимальное значение.
Синхронный и асинхронный двигатель отличия
Подписка на рассылку
 Для приведения в движение различных станков или механизмов на предприятиях тяжелой и легкой промышленности в большинстве случаев используются электродвигатели переменного тока. Электрические машины постоянного тока распространены в меньшей мере и чаще всего применяются в качестве тяговых агрегатов на городском электротранспорте, поездах, складских погрузчиках и тележках.
Для приведения в движение различных станков или механизмов на предприятиях тяжелой и легкой промышленности в большинстве случаев используются электродвигатели переменного тока. Электрические машины постоянного тока распространены в меньшей мере и чаще всего применяются в качестве тяговых агрегатов на городском электротранспорте, поездах, складских погрузчиках и тележках.
Чтобы достичь максимальной энергоэффективности производственных процессов, нужно правильно подходить к выбору двигателя для привода.
Синхронный и асинхронный двигатель – отличия для чайников
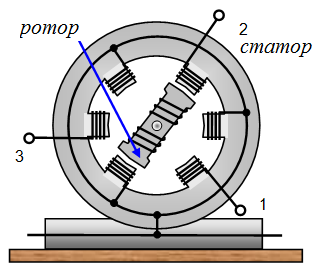
Конструкция асинхронных и синхронных электрических машин практически одинакова. У обоих электродвигателей есть неподвижный статор, состоящий из обмоток (катушек), которые уложены в пазы сердечника, набранного из пластин, выполненных из электротехнической стали, и подвижный ротор. Обмотки статора сдвинуты друг относительно друга на угол, равный 120°, поэтому проходящий по ним электрический ток создает вращающееся магнитное поле, которое вовлекает в движение ротор. Вот именно здесь и проявляется основное отличие этих электрических машин – конструкция ротора, от которой зависит скорость его вращения.
 Асинхронный двигатель
Асинхронный двигатель
 Асинхронный двигатель
Асинхронный двигательРотор такого двигателя может быть короткозамкнутым или фазным.
Вне зависимости от типа ротора в этих двигателях частота вращения ротора всегда будет меньше скорости вращения магнитного поля статора. Эта разница обусловлена законами физики:
- силовые линии магнитного поля статора, пересекая замкнутый контур ротора, индуцируют в нем электродвижущую силу, а значит и собственное магнитное поле;
- в результате взаимодействия этих полей, имеющих одинаковую полярность, возникает крутящий момент, вызывающий вращение ротора;
- в тот момент, когда скорости вращения магнитных полей становятся одинаковыми, возникновение ЭДС в роторе прекращается, в результате чего крутящий момент стремится к нулю;
- как только частота вращения ротора начинает отставать от скорости вращения поля статора, возникновение ЭДС возобновляется.
Синхронный двигатель
 Синхронный двигатель
Синхронный двигательРотор таких двигателей комплектуется постоянными магнитами или обмотками возбуждения. Обмотки могут быть как явнополюсными, так и распределенными (уложенными в пазы ротора). Кроме того, ротор синхронной машины может иметь и короткозамкнутые обмотки.
После разгона ротора до скорости близкой к частоте вращения магнитного поля статора, на катушки полюсов через щеточно-контактный узел подается постоянное напряжение, которое возбуждает в них постоянное магнитное поле. Противоположные полюса магнитных полей притягиваются друг к другу и частота вращения ротора становится синхронной.
Разгон ротора может осуществляться с помощью вспомогательного двигателя или в асинхронном режиме, благодаря короткозамкнутой обмотке.
Недостатки и преимущества двигателей
Синхронные двигатели имеют довольно сложную конструкцию, обусловленную наличием щеточного узла. Кроме того, для их работы требуется дополнительный источник постоянного тока. Еще одним недостатком является невозможность их эксплуатации в условиях частых пусков и остановов. Однако все это компенсируется большой мощностью, высоким КПД, устойчивостью к перепадам напряжения в питающей сети и стабильной частотой вращения вала, вне зависимости от величины нагрузки на него.
Асинхронный двигатель в отличие от синхронных машин более чувствителен к колебаниям напряжения и не может сохранять номинальную скорость вращения, при увеличении нагрузки. Но простота конструкции, длительный срок эксплуатации, универсальность применения, способность работать в режиме частых включений и остановок делают эти машины наиболее распространенными в промышленном и бытовом секторе.







