- Устройство и принцип действия асинхронных электродвигателей
- Принцип работы асинхронного двигателя
- Строение двигателя
- Принцип действия
- Как вращается ротор
- Гребневые асинхронные двигатели
- Подключение
- Аналогия с муфтой
- Достоинства и недостатки
- Трехфазный асинхронный двигатель
- Трехфазный асинхронный двигатель с короткозамкнутым ротором
- Концепция вращающегося магнитного поля
- Действие вращающегося магнитного поля на замкнутый виток
- Короткозамкнутый ротор асинхронного двигателя
- Скольжение асинхронного двигателя. Скорость вращения ротора
- Преобразование энергии
- Параметры асинхронного двигателя
- Режимы работы
- Регулирование частоты вращения асинхронных двигателей
Устройство и принцип действия асинхронных электродвигателей
В промышленности наибольшее распространение получили асинхронные двигатели трехфазного тока. Рассмотрим устройство и принцип действия этих двигателей.
Принцип действия асинхронного двигателя основан на использовании вращающегося магнитного поля.
Для уяснения работы такого двигателя проделаем следующий опыт.
Укрепим подковообразный магнит на оси таким образом, чтобы его можно было вращать за ручку. Между полюсами магнита расположим на оси медный цилиндр, могущий свободно вращаться.
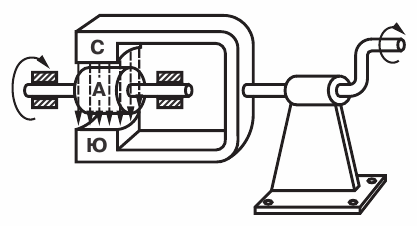
Рисунок 1. Простейшая модель для получения вращающегося магнитного поля
Начнем вращать магнит за ручку по часовой стрелке. Поле магнита также начнет вращаться и при вращении будет пересекать своими силовыми линиями медный цилиндр. В цилиндре, по закону электромагнитной индукции, возникнут вихревые токи, которые создадут свое собственное магнитное поле — поле цилиндра. Это поле будет взаимодействовать с магнитным полем постоянного магнита, в результате чего цилиндр начнет вращаться в ту же сторону, что и магнит.
Установлено, что скорость вращения цилиндра несколько меньше скорости вращения поля магнита.
Действительно, если цилиндр вращается с той же скоростью, что и магнитное поле, то магнитные силовые линии не пересекают его, а следовательно, в нем не возникают вихревые токи, вызывающие вращение цилиндра.
Скорость вращения магнитного поля принято называть синхронной , так как она равна скорости вращения магнита, а скорость вращения цилиндра — асинхронной (несинхронной). Поэтому сам двигатель получил название асинхронного двигателя . Скорость вращения цилиндра (ротора) отличается от синхронной скорости вращения магнитного поля на небольшую величину, называемую скольжением.
Обозначив скорость вращения ротора через n1 и скорость вращения поля через n мы можем подсчитать величину скольжения в процентах по формуле:
В приведенном выше опыте вращающееся магнитное поле и вызванное им вращение цилиндра мы получали благодаря вращению постоянного магнита, поэтому такое устройство еще не является электродвигателем . Надо заставить электрический ток создавать вращающееся магнитное поле и использовать его для вращения ротора. Задачу эту в свое время блестяще разрешил М. О. Доливо-Добровольский. Он предложил использовать для этой цели трехфазный ток.
Устройство асинхронного электродвигателя М. О. Доливо-Добровольского
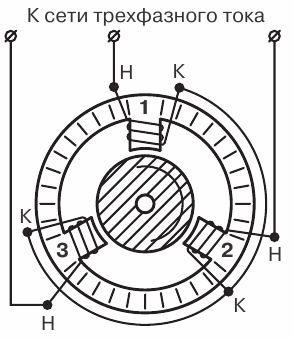
Рисунок 2. Схема асинхронного электродвигателя Доливо-Добровольского
На полюсах железного сердечника кольцевой формы, называемого статором электродвигателя , помещены три обмотки, сети трехфазного тока 0 расположенные одна относительно другой под углом 120°.
Внутри сердечника укреплен на оси металлический цилиндр, называемый ротором электродвигателя.
Если обмотки соединить между собой так, как показано на рисунке, и подключить их к сети трехфазного тока, то общий магнитный поток, создаваемый тремя полюсами, окажется вращающимся.
На рисунке 3 показан график изменения токов в обмотках двигателя и процесс возникновения вращающегося магнитного поля.
Рассмотрим — подробнее этот процесс.
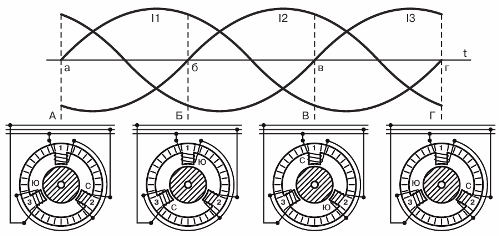
Рисунок 3. Получение вращающегося магнитного поля
В положении «А» на графике ток в первой фазе равен нулю, во второй фазе он отрицателен, а в третьей положителен. Ток по катушкам полюсов потечет в направлении, указанном на рисунке стрелками.
Определив по правилу правой руки направление созданного током магнитного потока, мы убедимся, что на внутреннем конце полюса (обращенном к ротору) третьей катушки будет создан южный полюс (Ю), а на полюсе второй катушки — северный полюс (С). Суммарный магнитный поток будет направлен от полюса второй катушки через ротор к полюсу третьей катушки.
 В положении «Б» на графике ток во второй фазе равен нулю, в первой фазе он положителен, а в третьей отрицателен. Ток, протекая по катушкам полюсов, создает на конце первой катушки южный полюс (Ю), на конце третьей катушки северный полюс (С). Суммарный магнитный поток теперь будет направлен от третьего полюса через ротор к первому полюсу, т. е. полюсы при этом переместятся на 120°.
В положении «Б» на графике ток во второй фазе равен нулю, в первой фазе он положителен, а в третьей отрицателен. Ток, протекая по катушкам полюсов, создает на конце первой катушки южный полюс (Ю), на конце третьей катушки северный полюс (С). Суммарный магнитный поток теперь будет направлен от третьего полюса через ротор к первому полюсу, т. е. полюсы при этом переместятся на 120°.
В положении «В» на графике ток в третьей фазе равен нулю, во второй фазе он положителен, а в первой отрицателен. Теперь ток, протекая по первой и второй катушкам, создаст на конце полюса первой катушки — северный полюс (С), а на конце полюса второй катушки — южный полюс (Ю), т. е. полярность суммарного магнитного поля переместится еще на 120°. В положении «Г» на графике магнитное поле переместится еще на 120°.
Таким образом, суммарный магнитный поток будет менять свое направление с изменением направления тока в обмотках статора (полюсов).
При этом за один период изменения тока в обмотках магнитный поток сделает полный оборот. Вращающийся магнитный поток будет увлекать за собой цилиндр, и мы получим таким образом асинхронный электродвигатель.
Напомним, что на рисунке 3 обмотки статора соединены «звездой», однако вращающееся магнитное поле образуется и при соединении их «треугольником».
Если мы поменяем местами обмотки второй и третьей фаз, то магнитный поток изменит направление своего вращения на обратное.
Такого же результата можно добиться, не меняя местами обмотки статора, а направляя ток второй фазы сети в третью фазу статора, а третью фазу сети — во вторую фазу статора.
Таким образом, изменить направление вращения магнитного поля можно переключением двух любых фаз.
Мы рассмотрели устройство асинхронного двигателя, имеющего на статоре три обмотки . В этом случае вращающееся магнитное поле двухполюсное и число его оборотов в одну секунду равно числу периодов изменения тока в одну секунду.
 Если на статоре разместить по окружности шесть обмоток, то будет создано четырехполюсное вращающееся магнитное поле . При девяти обмотках поле будет шестиполюсным.
Если на статоре разместить по окружности шесть обмоток, то будет создано четырехполюсное вращающееся магнитное поле . При девяти обмотках поле будет шестиполюсным.
При частоте трехфазного тока f , равной 50 периодам в секунду, или 3000 в минуту, число оборотов n вращающегося поля в минуту будет:
при двухполюсном статоре n = (50 х 60 ) / 1 = 3000 об/мин,
при четырехполюсном статоре n = (50 х 60 ) / 2 = 1500 об/мин,
при шестиполюсном статоре n = (50 х 60 ) / 3 = 1000 об/мин,
при числе пар полюсов статора, равном p : n = (f х 60 ) / p ,
Итак, мы установили скорость вращения магнитного поля и зависимость ее от числа обмоток на статоре двигателя.
Ротор же двигателя будет, как нам известно, несколько отставать в своем вращении.
Однако отставание ротора очень небольшое. Так, например, при холостом ходе двигателя разность скоростей составляет всего 3%, а при нагрузке 5 — 7%. Следовательно, обороты асинхронного двигателя при изменении нагрузки изменяются в очень небольших пределах, что является одним из его достоинств.
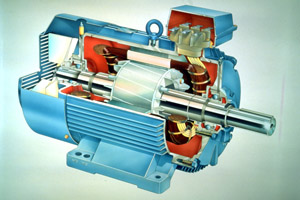
Рассмотрим теперь устройство асинхронных электродвигателей
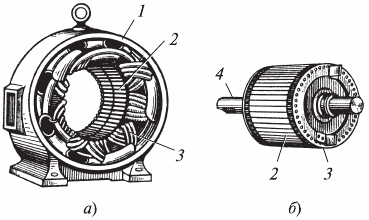
Статор современного асинхронного электродвигателя имеет невыраженные полюсы, т. е. внутренняя поверхность статора сделана совершенно гладкой.
Чтобы уменьшить потери на вихревые токи, сердечник статора набирают из тонких штампованных стальных листов.  Собранный сердечник статора закрепляют в стальном корпусе.
Собранный сердечник статора закрепляют в стальном корпусе.
В пазы статора закладывают обмотку из медной проволоки. Фазовые обмотки статора электродвигателя соединяются «звездой» или «треугольником», для чего все начала и концы обмоток выводятся на корпус — на специальный изоляционный щиток. Такое устройство статора очень удобно, так как позволяет включать его обмотки на разные стандартные напряжения.
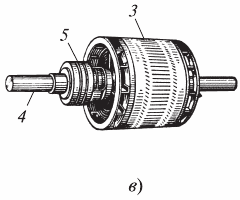
Ротор асинхронного двигателя , подобно статору, набирается из штампованных листов стали. В пазы ротора закладывается обмотка.
В зависимости от конструкции ротора асинхронные электродвигатели делятся на двигатели с короткозамкнутым ротором и фазным ротором .
Обмотка короткозамкнутого ротора сделана из медных стержней, закладываемых в пазы ротора. Торцы стержней соединены при помощи медного кольца. Такая обмотка называется обмоткой типа «беличьей клетки». Заметим, что медные стержни в пазах не изолируются.
В некоторых двигателях «беличью клетку» заменяют литым ротором.
Асинхронный двигатель с фазным ротором (с контактными кольцами) применяется обычно в электродвигателях большой мощности и в тех случаях; когда необходимо, чтобы электродвигатель создавал большое усилие при трогании с места. Достигается это тем, что в обмотки фазного двигателя включается пусковой реостат.
Короткозамкнутые асинхронные двигатели пускаются в ход двумя способами:
1) Непосредственным подключением трехфазного напряжения сети к статору двигателя. Этот способ самый простой и наиболее популярный.
2) Снижением напряжения, подводимого к обмоткам статора. Напряжение снижают, например, переключая обмотки статора со «звезды» на «треугольник».
Пуск двигателя в ход происходит при соединении обмоток статора «звездой», а когда ротор достигнет нормального числа оборотов, обмотки статора переключаются на соединение «треугольником».
Ток в подводящих проводах при этом способе пуска двигателя уменьшается в 3 раза по сравнению с тем током, который возник бы при пуске двигателя прямым включением в сеть с обмотками статора, соединенными «треугольником». Однако этот способ пригоден лишь в том случае, если статор рассчитан для нормальной работы при соединении его обмоток «треугольником».
Наиболее простым, дешевым и надежным является асинхронный электродвигатель с короткозамкнутым ротором , но этот двигатель обладает некоторыми недостатками — малым усилием при трогании с места и большим пусковым током. Эти недостатки в значительной мере устраняются применением фазного ротора, но применение такого ротора значительно удорожает двигатель и требует пускового реостата.

Типы асинхронных электродвигателей
Основной тип асинхронных машин — трехфазный асинхронный двигатель . Он имеет три обмотки на статоре, смещенные в пространстве на 120°. Обмотки соединяются в звезду или треугольник и питаются трехфазным переменным током.
Двигатели малой мощности в большинстве случаев выполняются как двухфазные . В отличие от трехфазных двигателей они имеют на статоре две обмотки, токи в которых для создания вращающегося магнитного поля должны быть сдвинуты на угол π /2.
Если токи в обмотках равны по модулю и сдвинуты по фазе на 90°, то работа подобного двигателя ничем не будет отличаться от работы трехфазного. Однако такие двигатели с двумя обмотками на статоре в большинстве случаев питаются от однофазной сети и сдвиг, приближающийся к 90°, создается искусственным путем, обычно за счет конденсаторов.
Однофазный двигатель , имеющий только одну обмотку на статоре, практически неработоспособен. При неподвижном роторе в двигателе создается только пульсирующее магнитное поле и вращающий момент равен нулю. Правда, если ротор такой машины раскрутить до некоторой скорости, то далее она может выполнять функции двигателя.
В этом случае, хотя и будет только пульсирующее поле, но оно слагается из двух симметричных — прямого и обратного, которые создают неравные моменты — больший двигательный и меньший тормозной, возникающий за счет токов ротора повышенной частоты (скольжение относительно обратносинхронного поля больше 1).
В связи с изложенным однофазные двигатели снабжаются второй обмоткой, которая используется как пусковая. В цепь этой обмотки для создания фазового сдвига тока включают конденсаторы, емкость которых может быть достаточно велика (десятки микрофарад при мощности двигателя менее 1 кВт).
В системах управления используются двухфазные двигатели, которые иногда называют исполнительными . Они имеют две обмотки на статоре, сдвинутые в пространстве на 90°. Одна из обмоток, называемая обмоткой возбуждения, непосредственно подключается к сети 50 или 400 Гц. Вторая используется как обмотка управления.
Для создания вращающегося магнитного поля и соответствующего момента ток в обмотке управления должен быть сдвинут на угол, близкий к 90°. Регулирование скорости двигателя, как будет показано ниже, осуществляется изменением значения или фазы тока в этой обмотке. Реверс обеспечивается изменением фазы тока в управляющей обмотке на 180° (переключением обмотки).
Двухфазные двигатели изготовляются в нескольких исполнениях:
с короткозамкнутым ротором,
с полым немагнитным ротором,
с полым магнитным ротором.
Преобразование вращательного движения двигателя в поступательное движение органов рабочей машины всегда связано с необходимостью использования каких-либо механических узлов: зубчатых реек, винта и др. Поэтому иногда целесообразно выполнение двигателя с линейным перемещением ротора-бегунка (название ’’ротор” при этом может быть принято только условно — как движущегося органа).
В этом случае двигатель, как говорят, может быть развернут. Обмотка статора линейного двигателя выполняется так же, как и у объемного двигателя, но только должна быть заложена в пазы на всю длину максимального возможного перемещения ротора-бегунка. Ротор-бегунок обычно короткозамкнутый, с ним сочленяется рабочий орган механизма. На концах статора, естественно, должны находиться ограничители, препятствующие уходу ротора за рабочие пределы пути.
Принцип работы асинхронного двигателя
Электродвигатель предназначен для преобразования, с малыми потерями, электрическую энергию в механическую.
Строение двигателя
Основные элементы электродвигателя это – статор, ротор, их обмотки и магнитопровод.
Преобразование электрической энергии в механическую происходит во вращающейся части мотора — роторе.
У двигателя переменного тока, ротор получает энергию не только за счет магнитного поля, но и при помощи индукции. Таким образом, они называются асинхронными двигателями. Это можно сравнить с вторичной обмоткой трансформатора. Эти асинхронные двигатели еще называют вращающимися трансформаторами. Чаще всего используется модели рассчитанные на трех фазное включение.
Конструкция асинхронного двигателя
Направление вращения электродвигателя задается правилом левой руки буравчика: оно демонстрирует связь между магнитным полем и проводником.
Второй очень важный закон – Фарадея:
- ЭДС наводиться в обмотке, но электромагнитный поток меняется во временем.
- Величина наведенной ЭДС прямо пропорциональна скорости изменения электрического потока.
- Направление ЭДС противодействует току.
Принцип действия
При подаче напряжения на неподвижные обмотки статора, оно создает магнитное в статора. Если подается напряжение переменного тока, то магнитный поток, созданный им, изменяется. Так статор производит изменение магнитного поля, и ротор получает магнитные потоки.
Таким образом, ротор электродвигателя принимает эти поток статора и, следовательно, вращается. Это основной принцип работы и скольжения в асинхронных машинах. Из вышеизложенного следует отметить, что магнитный поток статора (и его напряжение) должно быть равно переменному току для вращения ротора, так что асинхронная машина может работать только от сети переменного тока.
Принцип работы асинхронного двигателя
Когда такие двигатели действуют в качестве генератора, они будет генерировать непосредственно переменный ток. В случае такой работы, ротор вращается с помощью внешних средств скажем, турбины. Если ротор имеет некоторый остаточный магнетизм, то есть некоторые магнитные свойства, которые сохраняет по типу магнита внутри материала, то ротор создает переменный поток в стационарной обмотке статора. Так что это обмотки статора будут получать наведенное напряжение по принципу индукции.
Индукционные генераторы используются в небольших магазинах и домашних хозяйствах, чтобы обеспечить дополнительную поддержку питания и являются наименее дорогостоящими из-за легкого монтажа. В последнее время они широко используется людьми в тех странах, где электрические машины теряют мощность из-за постоянных перепадов напряжения в питающей электросети. Большую часть времени, ротор вращается при помощи небольшого дизельного двигателя соединенного с асинхронным генератором переменного напряжения.
Как вращается ротор
Вращающийся магнитный поток проходит через воздушный зазор между статором, ротором и обмоткой неподвижных проводников в роторе. Этот вращающийся поток, создает напряжение в проводниках ротора, тем самым заставляя наводиться в них ЭДС. В соответствии с законом Фарадея электромагнитной индукции, именно это относительное движение между вращающимся магнитным потоком и неподвижными обмотками ротора, которые возбуждает ЭДС, и является основой вращения.
Двигатель с короткозамкнутым ротором, в котором проводники ротора образовывают замкнутую цепь, в следствии чего возникает ЭДС наводящая ток в нем, направление задается законом Ленса, и является таким, чтобы противодействовать причине его возникновения. Относительное движение ротора между вращающимся магнитным потоком и неподвижным проводником и является его действием к вращению. Таким образом, чтобы уменьшить относительную скорость, ротор начинает вращаться в том же направлении, что и вращающийся поток на обмотках статора, пытаясь поймать его. Частота наведенной на него ЭДС такая же, как частота питания.
Гребневые асинхронные двигатели
Когда напряжение питания низкое, возбуждение обмоток короткозамкнутого ротора не происходит. Это обусловлено тем что, когда число зубцов статора и число зубьев ротора равное, таким образом вызывая магнитную фиксацию между статором и ротором. Этот физический контакт иначе называется зубо-блокировкой или магнитной блокировкой. Данная проблема может быть преодолена путем увеличения количества пазов ротора или статора.
Подключение
Асинхронный двигатель можно остановить, просто поменяв местами любые два из выводов статора. Это используется во время чрезвычайных ситуаций. После он изменяет направление вращающегося потока, который производит вращающий момент, тем самым вызывая разрыв питания на роторе. Это называется противофазным торможением.
Видео: Как работает асинхронный двигатель
Для того чтобы этого не происходило в однофазном асинхронном двигателе, необходимо использование конденсаторного устройства.
Его нужно подключить к пусковой обмотке, но предварительно обязательно проводится его расчет.
Формула, из которой следует, что электрические машины переменного тока двухфазного или однофазного типа должны снабжаться конденсаторами с мощностью, равной самой мощности двигателя.
QC = Uс I2 = U2 I2 / sin2
Схема: Подключение асинхронного двигателя
Аналогия с муфтой
Рассматривая принцип действия асинхронного электродвигателя, используемого в промышленных машинах, и его технические характеристики, нужно сказать про вращающуюся муфту механического сцепления . Крутящий момент на валу привода должен равняться крутящему моменту на ведомом валу. Кроме того, следует подчеркнуть, что эти два момента являются одним и тем же, поскольку крутящий момент линейного преобразователя вызывается трением между дисков внутри самой муфты.
Электромагнитная муфта сцепления
Похожий принцип действия и у тягового двигателя с фазным ротором. Система такого мотора состоит из восьми полюсов (из которых 4 – основные, а 4 – добавочные), и остовы. На основных полюсах расположены медные катушки. Вращение такого механизма обязано зубчатой передаче, которая получает крутящий момент от вала якоря, так же называемого сердечником. Включение в сеть, производится четырьмя гибкими кабелями. Основное назначение многополюсного электродвигателя – приведение в движение тяжелой техники: тепловозы, тракторы, комбайны и в некоторых случаях, станки.
Достоинства и недостатки
Устройство асинхронного двигателя является практически универсальным, но так же, у данного механизма есть свои плюсы и минусы.
Преимущества асинхронных двигателей переменного тока:
- Конструкция простой формы.
- Низкая стоимость производства.
- Надежная и практичная в обращении конструкция.
- Не прихотлив в эксплуатации.
- Простая схема управления
Эффективность этих двигателей очень высока, так как нет потерь на трение, и относительно высокий коэффициент мощности.
Недостатки асинхронных двигателей переменного тока:
- Не возможен контроль скорости без потерь мощности.
- Если увеличивается нагрузка – уменьшается момент.
- Относительно небольшой пусковой момент.
Трехфазный асинхронный двигатель
Трехфазный асинхронный электродвигатель — это асинхронный электродвигатель, который имеет трехфазную обмотку статора.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с короткозамкнутым ротором — это асинхронный электродвигатель, у которого ротор выполнен с короткозамкнутой обмоткой в виде беличьей клетки [1].
Конструкция асинхронного электродвигателя
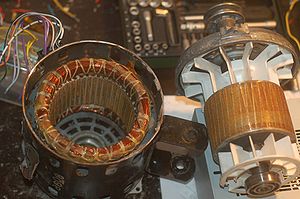
Трехфазный асинхронный электродвигатель, как и любой электродвигатель, состоит из двух основных частей — статора и ротора. Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0,5-2 мм.
Статор асинхронного двигателя Ротор асинхронного двигателя
Статор состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком. Шихтованная конструкция сердечника способствует значительному снижению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. Обмотки статора располагаются в пазах сердечника.
Корпус и сердечник статора асинхронного электродвигателя Конструкция шихтованного сердечника асинхронного двигателя
Ротор состоит из сердечника с короткозамкнутой обмоткой и вала. Сердечник ротора тоже имеет шихтованную конструкцию. При этом листы ротора не покрыты лаком, так как ток имеет небольшую частоту и оксидной пленки достаточно для ограничения вихревых токов.
Принцип работы. Вращающееся магнитное поле
Принцип действия трехфазного асинхронного электродвигателя основан на способности трехфазной обмотки при включении ее в сеть трехфазного тока создавать вращающееся магнитное поле.
Вращающееся магнитное поле — это основная концепция электрических двигателей и генераторов.
ЗагрузкаВращающееся магнитное поле асинхронного электродвигателя
Частота вращения этого поля, или синхронная частота вращения прямо пропорциональна частоте переменного тока f1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки.
, где n1 – частота вращения магнитного поля статора, об/мин, f1 – частота переменного тока, Гц, p – число пар полюсов
Концепция вращающегося магнитного поля
Чтобы понять феномен вращающегося магнитного поля лучше, рассмотрим упрощенную трехфазную обмотку с тремя витками. Ток текущий по проводнику создает магнитное поле вокруг него. На рисунке ниже показано поле создаваемое трехфазным переменным током в конкретный момент времени
ЗагрузкаМагнитное поле прямого проводника с постоянным током Магнитное поле создаваемое обмоткой
Составляющие переменного тока будут изменяться со временем, в результате чего будет изменяться создаваемое ими магнитное поле. При этом результирующее магнитное поле трехфазной обмотки будет принимать разную ориентацию, сохраняя при этом одинаковую амплитуду.
Магнитное поле создаваемое трехфазным током в разный момент времени Ток протекающий в витках электродвигателя (сдвиг 60°)ЗагрузкаВращающееся магнитное поле
Действие вращающегося магнитного поля на замкнутый виток
Теперь разместим замкнутый проводник внутри вращающегося магнитного поля. По закону электромагнитной индукции изменяющееся магнитное поле приведет к возникновению электродвижущей силы (ЭДС) в проводнике. В свою очередь ЭДС вызовет ток в проводнике. Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.
Влияние вращающегося магнитного поля на замкнутый проводник с током
Короткозамкнутый ротор асинхронного двигателя
По этому принципу также работает асинхронный электродвигатель. Вместо рамки с током внутри асинхронного двигателя находится короткозамкнутый ротор по конструкции напоминающий беличье колесо. Короткозамкнутый ротор состоит из стержней накоротко замкнутых с торцов кольцами.
Короткозамкнутый ротор «беличья клетка» наиболее широко используемый в асинхронных электродвигателях (показан без вала и сердечника)
Трехфазный переменный ток, проходя по обмоткам статора, создает вращающееся магнитное поле. Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться. На рисунке ниже Вы можете заметить различие между индуцируемыми токами в стержнях. Это происходит из-за того что величина изменения магнитного поля отличается в разных парах стержней, из-за их разного расположения относительно поля. Изменение тока в стержнях будет изменяться со временем.
Вращающееся магнитное поле пронизывающее короткозамкнутый ротор Магнитный момент действующий на ротор
Вы также можете заметить, что стержни ротора наклонены относительно оси вращения. Это делается для того чтобы уменьшить высшие гармоники ЭДС и избавиться от пульсации момента. Если стержни были бы направлены вдоль оси вращения, то в них возникало бы пульсирующее магнитное поле из-за того, что магнитное сопротивление обмотки значительно выше магнитного сопротивления зубцов статора.
Скольжение асинхронного двигателя. Скорость вращения ротора
Отличительный признак асинхронного двигателя состоит в том, что частота вращения ротора n2 меньше синхронной частоты вращения магнитного поля статора n1.
Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n2 , где s – скольжение асинхронного электродвигателя, n1 – частота вращения магнитного поля статора, об/мин, n2 – частота вращения ротора, об/мин,
Рассмотрим случай когда частота вращения ротора будет совпадать с частотой вращения магнитного поля статора. В таком случае относительное магнитное поле ротора будет постоянным, таким образом в стержнях ротора не будет создаваться ЭДС, а следовательно и ток. Это значит что сила действующая на ротор будет равна нулю. Таким образом ротор будет замедляться. После чего на стержни ротора опять будет действовать переменное магнитное поле, таким образом будет расти индуцируемый ток и сила. В реальности же ротор асинхронного электродвигателя никогда не достигнет скорости вращения магнитного поля статора. Ротор будет вращаться с некоторой скоростью которая немного меньше синхронной скорости.
Скольжение асинхронного двигателя может изменяться в диапазоне от 0 до 1, т. е. 0—100%. Если s
0, то это соответствует режиму холостого хода, когда ротор двигателя практически не испытывает противодействующего момента; если s=1 — режиму короткого замыкания, при котором ротор двигателя неподвижен (n2 = 0). Скольжение зависит от механической нагрузки на валу двигателя и с ее ростом увеличивается.
Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением. Для асинхронных двигателей малой и средней мощности номинальное скольжение изменяется в пределах от 8% до 2%.
Преобразование энергии
Асинхронный двигатель преобразует электрическую энергию подаваемую на обмотки статора, в механическую (вращение вала ротора). Но входная и выходная мощность не равны друг другу так как во время преобразования происходят потери энергии: на трение, нагрев, вихревые токи и потери на гистерезисе. Это энергия рассеивается как тепло. Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения.
Параметры асинхронного двигателя
При подборе таких машин, а также при дальнейшей их эксплуатации необходимо учитывать характеристики асинхронного двигателя. Они бывают энергетические — это коэффициент полезного действия, коэффициент мощности. Важно учитывать и механические показатели. Основным из них считается зависимость между скоростью вращения вала и рабочим усилием, прикладываемым к нему. Существуют ещё пусковые характеристики. Они определяют пусковой, минимальный и максимальный моменты и их соотношение. Важно также знать, каков пусковой ток асинхронного двигателя. Для наиболее эффективного использования двигателя необходимо учитывать все эти параметры.
Нельзя оставить без внимания вопрос энергосбережения. В последнее время он рассматривается не только с позиции уменьшения эксплуатационных затрат. Экономичность электродвигателей снижает уровень экологических проблем, связанных с производством электроэнергии.
Перед производителями постоянно ставятся задачи разработки и выпуска энергосберегающих двигателей, повышения эксплуатационного ресурса, уменьшения шумового уровня.
Улучшить энергосберегающие показатели можно путём снижения потерь при эксплуатации. А они напрямую зависят от рабочей температуры машины. Кроме того, совершенствование этой характеристики неизбежно приведёт к увеличению срока эксплуатации двигателя.
Снизить температуру обмоток можно, применяя вентилятор наружного обдува, закреплённый на хвостовике вала ротора. Но это приводит к неизбежному повышению шума, производимого двигателем при работе. Особенно ощутим этот показатель при высокой скорости вращения ротора.
Таким образом, видно, что асинхронный двигатель имеет один существенный недостаток. Он не способен поддерживать постоянную частоту вращения вала при возрастающих нагрузках. Зато такой двигатель имеет множество преимуществ по сравнению с образцами электродвигателей других конструкций.
Во-первых, он имеет надёжную конструкцию. Работа асинхронного двигателя не вызывает никаких сложностей при его использовании.
Во-вторых, асинхронный двигатель экономичен в производстве и эксплуатации.
В-третьих, эта машина универсальна. Имеется возможность её использования в любых устройствах, которые не требуют точного поддержания частоты вращения вала якоря.
В-четвёртых, двигатель с асинхронным принципом действия востребован и в быту, получая питание только от одной фазы.
Режимы работы
Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим – основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
Регулирование частоты вращения асинхронных двигателей
Для регулирования частоты вращения асинхронных электродвигателей и управления режимами их работы существуют следующие способы:
- Частотный – при изменении частоты тока в электрической сети изменяется частота вращения электрического двигателя. Для такого способа применяют устройство, которое называется частотный преобразователь;
- Реостатный – при изменении сопротивления реостата в роторе, изменяется частота вращения. Такой способ увеличивает пусковой момент и критическое скольжение;
- Импульсный – способ управления, при котором на двигатель подается напряжение специального вида.
- Переключение обмоток по время работы электрического двигателя со схемы «звезда» на схему «треугольник», что снижает пусковые токи;
- Управление с изменения пар полюсов для короткозамкнутых роторов;
- Подключение индуктивного сопротивления для двигателей с фазным ротором.
С развитием электронных систем, управление различными электродвигателями асинхронного типа становится все более эффективным и точным. Такие двигатели используются в мире повсеместно, разнообразие задач, выполняемых такими механизмами, с каждым днем растет, и потребность в них не уменьшается.







