Устройство статора бесколлекторной машины и основные понятия об обмотках статора
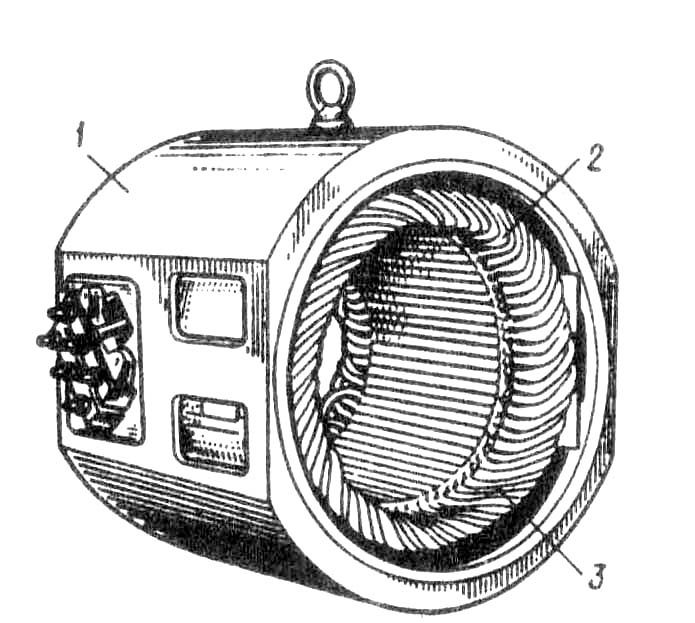
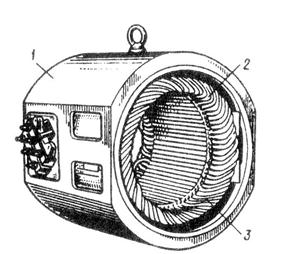
Статор бесколлекторной машины переменного тока (рис. 7.1) состоит из корпуса 1, сердеч-ника 2 и обмотки 3. Сердечник статора имеет шихтованную конструкцию, т. е. представляет собой пакет пластин, полученных методом штамповки из листовой электротехнической стали. Пластины предварительно покрывают с двух сторон тонкой изоляционной пленкой, например слоем лака. На внутренней поверхности сердечника статора имеются продольные пазы, в которых располагаются проводники обмотки статора. Обмотка статора выполняется из медных обмоточных проводов круглого или прямоугольного сечения.
Требования к обмотке статора в основном сводятся к следующему: а) наименьший расход обмоточной меди; б) удобство и минимальные затраты н изготовлении — технологичность; в) форма кривой ЭДС, наводимой в обмотке статора, должна был. практически синусоидальной.
Применительно к генераторам переменного тока это требование обусловлено тем, что при несинусоидальной ЭДС генератора в электрической цепи появляются высшие гармоники тока, оказывающие вредное влияние на работу всей энергосистемы: возрастают потери, возникают опасные перенапряжения, усиливается вредное влияние линий электропередачи на цепи связи. Применительно к двигателям переменного тока требование к синусоидальности ЭДС обмотки статора также весьма актуально, так как несинусоидальность ЭДС ведет к росту потерь и уменьшению полезной мощности двигателя.
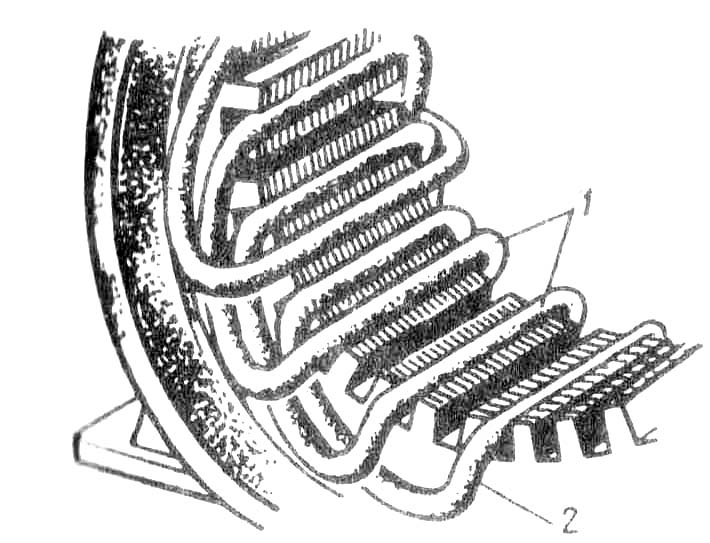
Многофазная обмотка статора состоит из m1 — фазных обмоток. Например, трехфазная обмотка (m1 = 3) состоит из трех фазных обмоток, каждая из которых занимает Z1\3 пазов, где Z1 — общее число пазов сердечника статора. Каждая фазная обмотка представляет собой разом- кнутую систему проводников. Элементом обмотки является катушка, состоящаяиз одного или нескольких витков. Элементы катушки, располагаемые в пазах, называют пазовыми сторонами 1, а элементы, расположенные вне пазов и служащие для соединения пазовых сторон, называют лобовыми частями 2 (рис. 7.2). Часть дуги внутренней расточки статора, приходящаяся на один полюс, называется полюсным делением (м):
8.
Рис. 7.1. Статор бесколлекторной машины переменного тока
где D1 — внутренний диаметр статора, м; 2р — число полюсов.
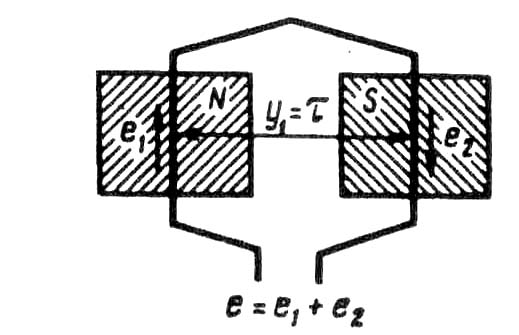
Расстояние между пазовыми сторонами катушки, измеренное но внутренней поверхности статора, называется шагом обмотки по пазам у1. Шаг обмотки выражают в пазах. Шаг обмотки называется полным или диаметральным, если он равен полюсному делению:
В этом случае ЭДС витка определяется арифметической суммой ЭДС, наведенных в сторонах этого витка (рис. 7.3):
Если же шаг обмотки меньше полюсного деления (у1
Обмотка статора состоит, как правило, из большого числа катушек, соединенных между собой определенным образом. Для удобного и наглядного изображения катушек и их соединений пользуются развернутыми схемами обмоток. На такой схеме цилиндрическую поверхность статора вместе с обмоткой условно развертывают на плоскости, а все катушки изображают одновитковыми в виде прямых линий.
Простейшая трехфазная обмотка статора двухполюсной машины состоит из трех катушек (А, В, С), оси которых смещены в пространстве относительно друг друга на 120 эл. град, т. е. на
10.
Рис 7.2. Расположение катушек в пазах сердечника статора
полюсного деления (рис. 7.4). Такая обмотка называется сосредоточенной. Каждая катушка здесь представляет собой фазную обмотку.
11.
Рис. 7.3. При диаметральном шаге ЭДС в
пазовых сторонах катушки направлены согласно
В соответствии с ГОСТом выводы трехфазных обмоток статора обозначают следующим образом:
Первая фаза. начало С1 — конец С4
Вторая фаза. » С2 — » С5
Третья фаза. » СЗ — » С6
Конструкция обмотки статора в значительной мере влияет на свойства машины переменного тока, в первую очередь на ее стоимость, КПД и рабочие характеристики.
8. Электродвижущая сила фазной обмотки статора. ЭДС катушки, ЭДС катушечной группы, ЭДС обмотки статора. Зубцовые гармоники ЭДС.
III-яя глава: Режим, применяемый к почетным консульским должностным лицам и консульским учреждениям, возглавляемым такими должностными лицами.
Вторая глава
ГЛАВА 1
Глава 1
Глава 1
Глава 1
Глава 1
Глава 1
Глава 1
Глава 1
• Принцип выполнения обмоток статора
Устройство статора бесколлекторной машины и основные понятия об обмотках статора
Статор бесколлекторной машины переменного тока (рис. 7.1) состоит из корпуса 1, сердеч-ника 2 и обмотки 3. Сердечник статора имеет шихтованную конструкцию, т. е. представляет собой пакет пластин, полученных методом штамповки из листовой электротехнической стали. Пластины предварительно покрывают с двух сторон тонкой изоляционной пленкой, например слоем лака. На внутренней поверхности сердечника статора имеются продольные пазы, в которых располагаются проводники обмотки статора. Обмотка статора выполняется из медных обмоточных проводов круглого или прямоугольного сечения.
Требования к обмотке статора в основном сводятся к следующему: а) наименьший расход обмоточной меди; б) удобство и минимальные затраты н изготовлении — технологичность; в) форма кривой ЭДС, наводимой в обмотке статора, должна был. практически синусоидальной.
Применительно к генераторам переменного тока это требование обусловлено тем, что при несинусоидальной ЭДС генератора в электрической цепи появляются высшие гармоники тока, оказывающие вредное влияние на работу всей энергосистемы: возрастают потери, возникают опасные перенапряжения, усиливается вредное влияние линий электропередачи на цепи связи. Применительно к двигателям переменного тока требование к синусоидальности ЭДС обмотки статора также весьма актуально, так как несинусоидальность ЭДС ведет к росту потерь и уменьшению полезной мощности двигателя.
Многофазная обмотка статора состоит из m1 — фазных обмоток. Например, трехфазная обмотка (m1 = 3) состоит из трех фазных обмоток, каждая из которых занимает Z1\3 пазов, где Z1 — общее число пазов сердечника статора. Каждая фазная обмотка представляет собой разом- кнутую систему проводников. Элементом обмотки является катушка, состоящаяиз одного
или нескольких витков. Элементы катушки, располагаемые в пазах, называют пазовыми сторонами 1, а элементы, расположенные вне пазов и служащие для соединения пазовых сторон, называют лобовыми частями 2 (рис. 7.2). Часть дуги внутренней расточки статора, приходящаяся на один полюс, называется полюсным делением (м):
Рис. 7.1. Статор бесколлекторной машины переменного тока
где D1 — внутренний диаметр статора, м; 2р — число полюсов.
Расстояние между пазовыми сторонами катушки, измеренное но внутренней поверхности статора, называется шагом обмотки по пазам у1. Шаг обмотки выражают в пазах. Шаг обмотки называется полным или диаметральным, если он равен полюсному делению:
В этом случае ЭДС витка определяется арифметической суммой ЭДС, наведенных в сторонах этого витка (рис. 7.3):
Если же шаг обмотки меньше полюсного деления (у1
Простейшая трехфазная обмотка статора двухполюсной машины состоит из трех катушек (А, В, С), оси которых смещены в пространстве относительно друг друга на 120 эл. град, т. е. на
Рис 7.2. Расположение катушек в пазах сердечника статора
полюсного деления (рис. 7.4). Такая обмотка называется сосредоточенной. Каждая катушка здесь представляет собой фазную обмотку.
Рис. 7.3. При диаметральном шаге ЭДС в
пазовых сторонах катушки направлены согласно
В соответствии с ГОСТом выводы трехфазных обмоток статора обозначают следующим образом:
Первая фаза. начало С1 — конец С4
Вторая фаза. » С2 — » С5
Третья фаза. » СЗ — » С6
Конструкция обмотки статора в значительной мере влияет на свойства машины переменного тока, в первую очередь на ее стоимость, КПД и рабочие характеристики.
Дата добавления: 2015-01-17 ; просмотров: 24 ; Нарушение авторских прав
Устройство статора бесколлекторной машины и основные понятия об обмотках статора
Принцип выполнения обмоток статора
Контрольные вопросы
1. Объясните принцип действия генератора переменного тока.
2. Чем определяется форма графика ЭДС синхронного генератора?
3. Каково назначение контактных колец и щеток в синхронном генераторе?
4. Объясните принцип действия асинхронного двигателя.
5. Может ли ротор асинхронного двигателя вращаться синхронно с вращающимся полем?
6. Какие функции выполняет обмотка статора в синхронном генераторе и в асинхронном двигателе?
ГЛАВА 7
Статор бесколлекторной машины переменного тока (рис. 7.1) состоит из корпуса 1, сердеч-ника 2 и обмотки 3. Сердечник статора имеет шихтованную конструкцию, т. е. представляет собой пакет пластин, полученных методом штамповки из листовой электротехнической стали. Пластины предварительно покрывают с двух сторон тонкой изоляционной пленкой, например слоем лака. На внутренней поверхности сердечника статора имеются продольные пазы, в которых располагаются проводники обмотки статора. Обмотка статора выполняется из медных обмоточных проводов круглого или прямоугольного сечения.
Требования к обмотке статора в основном сводятся к следующему: а) наименьший расход обмоточной меди; б) удобство и минимальные затраты н изготовлении — технологичность; в) форма кривой ЭДС, наводимой в обмотке статора, должна был. практически синусоидальной.
Применительно к генераторам переменного тока это требование обусловлено тем, что при несинусоидальной ЭДС генератора в электрической цепи появляются высшие гармоники тока, оказывающие вредное влияние на работу всей энергосистемы: возрастают потери, возникают опасные перенапряжения, усиливается вредное влияние линий электропередачи на цепи связи. Применительно к двигателям переменного тока требование к синусоидальности ЭДС обмотки статора также весьма актуально, так как несинусоидальность ЭДС ведет к росту потерь и уменьшению полезной мощности двигателя.
Многофазная обмотка статора состоит из m1 — фазных обмоток. Например, трехфазная обмотка (m1 = 3) состоит из трех фазных обмоток, каждая из которых занимает Z1\3 пазов, где Z1 — общее число пазов сердечника статора. Каждая фазная обмотка представляет собой разом- кнутую систему проводников. Элементом обмотки является катушка, состоящаяиз одного
или нескольких витков. Элементы катушки, располагаемые в пазах, называют пазовыми сторонами 1, а элементы, расположенные вне пазов и служащие для соединения пазовых сторон, называют лобовыми частями 2 (рис. 7.2). Часть дуги внутренней расточки статора, приходящаяся на один полюс, называется полюсным делением (м):
Рис. 7.1. Статор бесколлекторной машины переменного тока
где D1 — внутренний диаметр статора, м; 2р — число полюсов.
Расстояние между пазовыми сторонами катушки, измеренное но внутренней поверхности статора, называется шагом обмотки по пазам у1. Шаг обмотки выражают в пазах. Шаг обмотки называется полным или диаметральным, если он равен полюсному делению:
В этом случае ЭДС витка определяется арифметической суммой ЭДС, наведенных в сторонах этого витка (рис. 7.3):
Если же шаг обмотки меньше полюсного деления (у1
Вторая фаза. » С2 — » С5
Третья фаза. » СЗ — » С6
Конструкция обмотки статора в значительной мере влияет на свойства машины переменного тока, в первую очередь на ее стоимость, КПД и рабочие характеристики.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя.
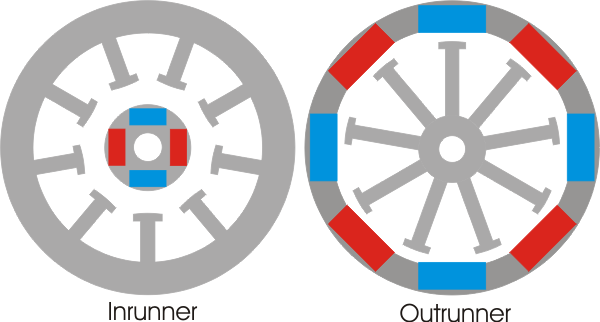
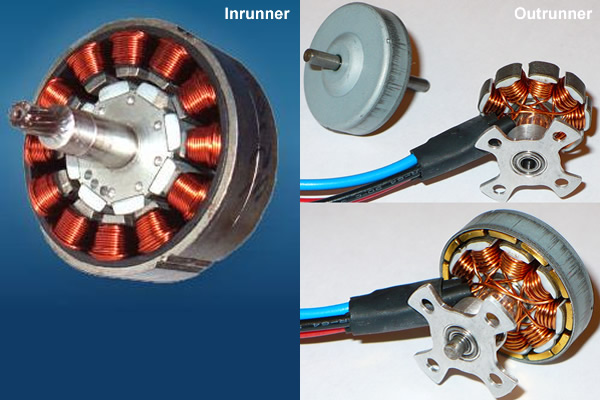
Общее устройство (Inrunner, Outrunner)
Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора. В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую ось.
Магниты и полюса
Количество магнитов не всегда соответствует количеству полюсов. Несколько магнитов могут формировать один полюс:
В этом случае 8 магнитов формируют 4 полюса. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Магниты на роторе закрепляются с помощью специального клея. Реже встречаются конструкции с держателем магнитов. Материал ротора может быть магнитопроводящим (стальным), немагнитопроводящим (алюминиевые сплавы, пластики и т.п.), комбинированным.
Обмотки и зубья
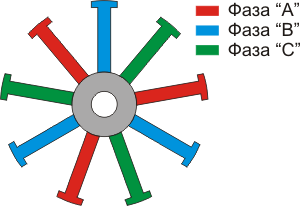
Количество зубьев статора должно делиться на количество фаз. т.е. для трехфазного бесколлекторного двигателя количество зубьев статора должно делиться на 3. Количество зубьев статора может быть как больше так и меньше количества полюсов на роторе. Например существуют моторы со схемами: 9 зубьев/12 магнитов; 51 зуб/46 магнитов.
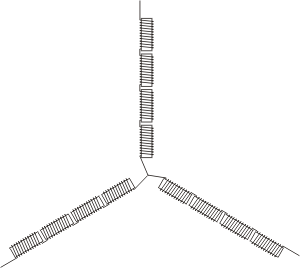
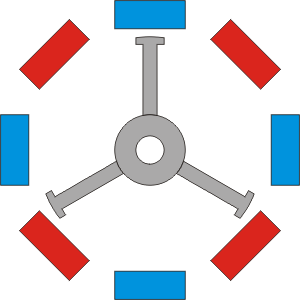
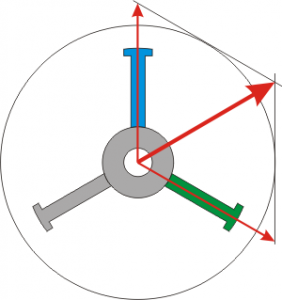
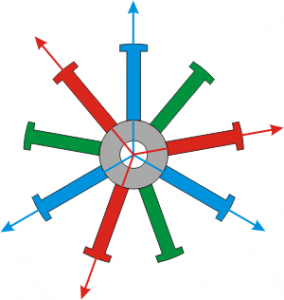
Двигателя с 3-х зубым статором применяют крайне редко. Поскольку в каждый момент времени работает только две фазы (при включении звездой), магнитные силы воздействуют на ротор не равномерно по всей окружности (см. рис.).
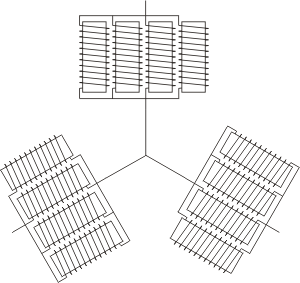
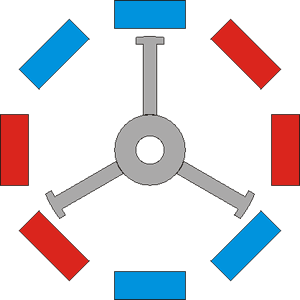
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее.
В этом случае магнитные силы, воздействующие на ротор, компенсируют друг друга. Дисбаланса не возникает.
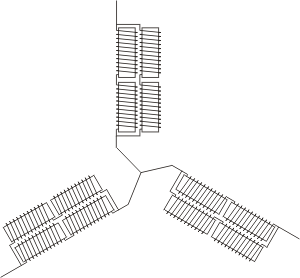
Варианты распределения обмоток фаз по зубьям статора
Вариант обмотки на 9 зубов
Вариант обмотки на 12 зубов
В приведенных схемах число зубов выбрано таким образом, чтобы оно делилось не только на 3. Например, при 36 зубьях приходится 12 зубьев на одну фазу. 12 зубьев можно распределить так:
6 групп по 2 зуба
4 группы по 3 зуба
3 группы по 4 зуба
2 группы по 6 зубьев
Наиболее предпочтительна схема 6 групп по 2 зуба.
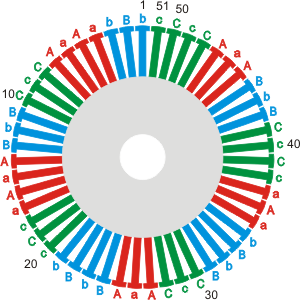
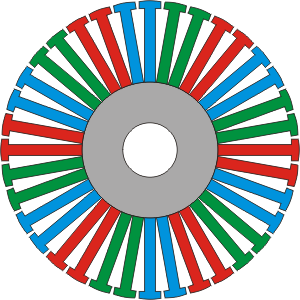
Существует двигатель с 51 зубом на статоре! 17 зубов на одну фазу. 17 — это простое число, оно нацело делится только на 1 и на само себя. Как же распределить обмотку по зубьям? Увы, но я не смог найти в литературе примеров и методик, которые помогли бы решить эту задачу. Оказалось, что обмотка распределялась следующим образом:
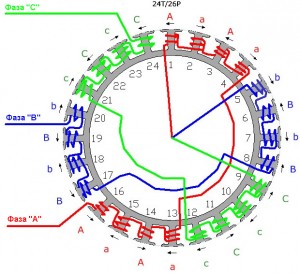
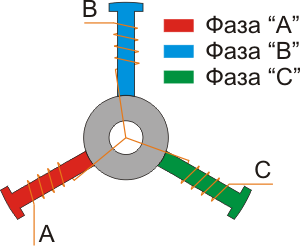
Рассмотрим реальную схему обмотки.
Обратите внимание, что обмотка имеет разные направления намотки на разных зубьях. Разные направления намотки обозначаются прописными и заглавными буквами. Детально о проектировании обмоток можно прочитать в литературе, предложенной в конце статьи.
Классическая обмотка выполняется одним проводом для одной фазы. Т.е. все обмотки на зубьях одной фазы соединены последовательно.
Обмотки зубьев могут соединяться и параллельно.
Так же могут быть комбинированные включения
Параллельное и комбинированное включение позволяет уменьшить индуктивность обмотки, что приводит к увеличению тока статора (следовательно и мощности) и скорости вращения двигателя.
Обороты электрические и реальные
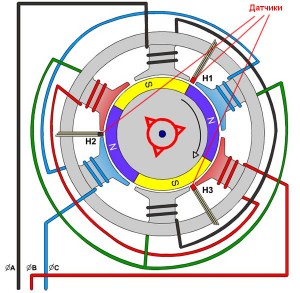
Датчики положения
Имеется в виду «электрических» градусов. Т.е. для многополюсного двигателя физическое расположение датчиков может быть таким:
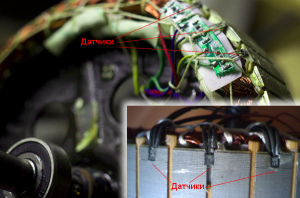
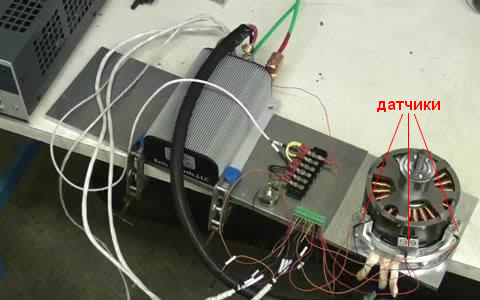
Иногда датчики располагают снаружи двигателя. Вот один из примеров расположения датчиков. На самом деле это был двигатель без датчиков. Таким простым способом его оснастили датчиками холла.
На некоторых двигателях датчики устанавливают на специальном устройстве, которое позволяет перемещать датчики в определенных пределах. С помощью такого устройства устанавливается угол опережения (timing). Однако, если двигатель требует реверса (вращения в обратную сторону) потребуется второй комплект датчиков, настроенных на обратный ход. Поскольку timing не имеет решающего значения при старте и низких оборотах, можно установить датчики в нулевую точку, а угол опережения корректировать программно, когда двигатель начнет вращаться.
Основные характеристики двигателя
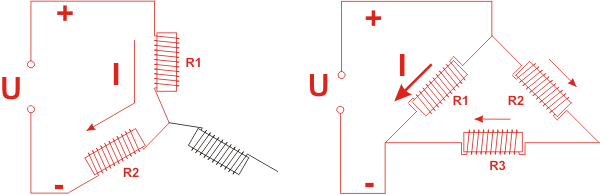
Звезда и Треугольник
При включении звездой ток протекает через две обмотки. Результирующее сопротивление равно сумме сопротивлений двух обмоток R=R1+R2. Соответственно максимально возможный ток, протекаемый через обмотки I=U/(R1+R2). Потребляемая мощность P=U*I Предположим, что напряжение 10 В, а сопротивление обмотки 1 ОМ. Тогда ток I=10/(1+1)=5А. Потребляемая мощность P=10*5=50 Вт.
При включении треугольником ток протекает через все обмотки. Результирующее сопротивление обмоток R=(R1*(R2+R3))/(R1+R2+R3). Соответственно, максимально возможный ток, протекаемый через обмотки I=U/((R1*(R2+R3))/(R1+R2+R3)
При таком же напряжении и сопротивлении обмоток получаем ток I=10/((1*(1+1))/(1+1+1))=15А. Потребляемая мощность P=10*15=150 Вт.
При включении треугольником вырастают и обороты двигателя. Обмотки двигателя соединенные треугольником греются больше, чем при включении звездой.
Очевидно, что простым переключением обмотки с звезды в треугольник можно получить двигатель с совершенно другими характеристиками.
В высокомоментных двигателях с длительным режимом включения целесообразно применять звезду. В двигателях, работающих в кратковременном режиме, требующих более высоких оборотов, целесообразно применять треугольник.
Иногда в электротранспорте старт и разгон выполняется при включении обмоток звездой (так как это включение обеспечивает высокий момент на валу, но меньшие обороты), после разгона выполняется переключение в треугольник (обороты выше, момент меньше). Это позволяет увеличить диапазон оборотов двигателя, сохранив стартовые характеристики.
В следующей статье будет рассмотрен алгоритм управления бесколлекторными двигателями.











 Вариант обмотки на 12 зубов
Вариант обмотки на 12 зубов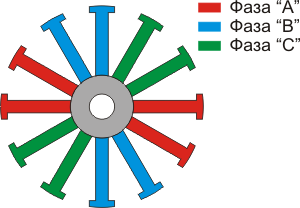
 6 групп по 2 зуба
6 групп по 2 зуба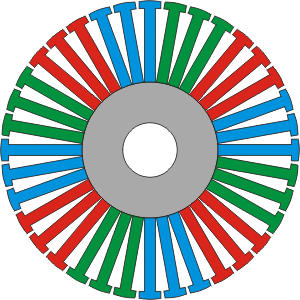 4 группы по 3 зуба
4 группы по 3 зуба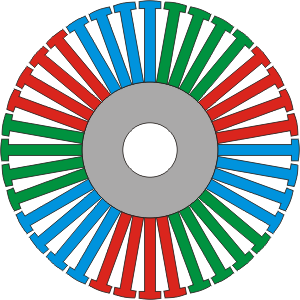 3 группы по 4 зуба
3 группы по 4 зуба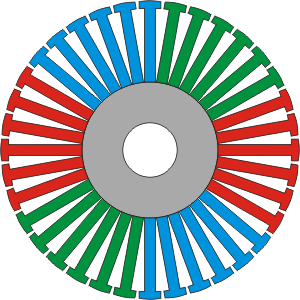 2 группы по 6 зубьев
2 группы по 6 зубьев