- Шаговые двигатели (подробный разбор 4 типов)
- Общие сведения:
- Виды шаговых двигателей по типу ротора:
- Какой тип шагового двигателя у меня?
- Виды шаговых двигателей по типу соединения электромагнитов статора:
- Какой тип шагового двигателя у меня?
- Режимы работы шаговых двигателей:
- Пример работы шаговых двигателей с разными видами роторов:
- Подключение шаговых двигателей к Arduino:
- Сервопривод или шаговый двигатель: какова разница и что выбрать?
- Устройство шагового привода
- Принцип работы шагового двигателя
- Устройство сервопривода
- Принцип действия сервопривода
- Чем отличается сервопривод от шагового двигателя?
- Критерии выбора
Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
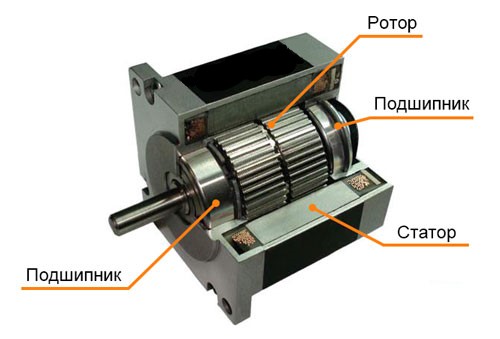
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.

- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.

На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим — ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим — ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим — ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.

Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.

Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.

Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.

Если подавать уровни не «0» — «½» — «1» (как на картинке), а «0» — «¼» — «½» — «¾» — «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления — доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.

Пример работы шаговых двигателей с разными видами роторов:

Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.
Сервопривод или шаговый двигатель: какова разница и что выбрать?

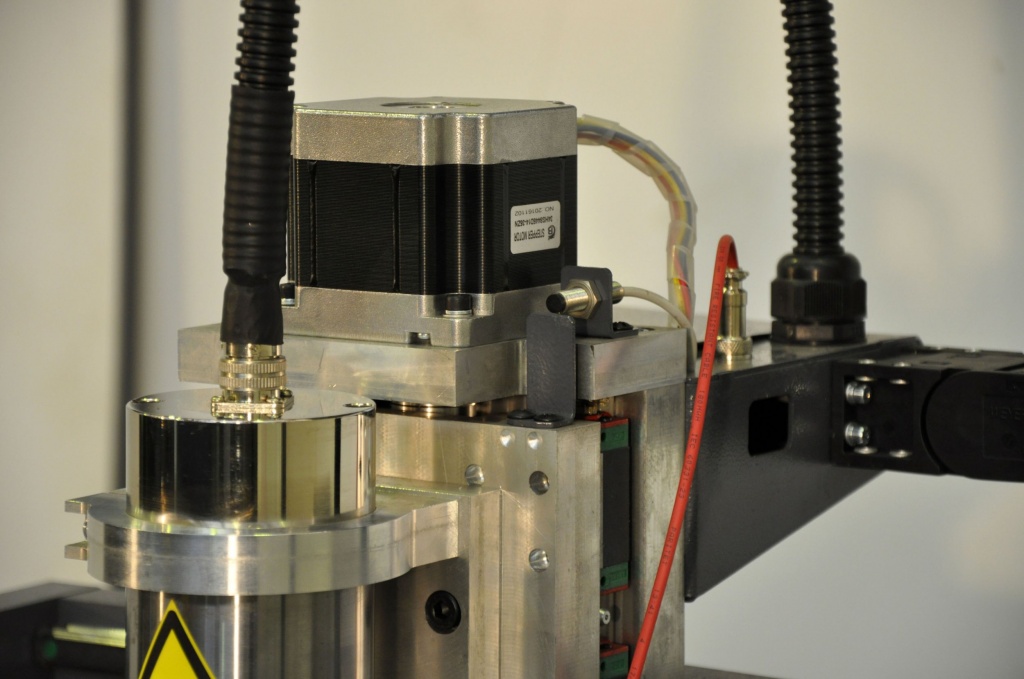
В качестве электропривода порталов и исполнительных узлов фрезерно-гравировальных станков с чпу и оборудования для плазменной резки с ЧПУ применяются шаговые двигатели и сервоприводы. Что лучше: шаговый двигатель или сервопривод, и в каких случаях применение того или иного электропривода экономически и технически оправданно, рассмотрим в данной статье.

Устройство шагового привода
Шаговый привод состоит из синхронной электрической машины и управляющего контроллера. Последний обеспечивает подачу управляющих сигналов на обмотки двигателя и их попеременное включение в соответствии с заданной программой.
Шаговый двигатель — электрическая машина, преобразующая управляющие сигналы в перемещение вала на определенный угол и фиксацию его в заданном положении. Количество шагов таких электродвигателей составляет от 100 до 400, угол шага — от 0,9-3,6°.
Принцип работы шагового двигателя
Состоит это электромеханическое устройство из статора, где размещены катушки возбуждения, и вращающейся части с постоянными магнитами или обмотками. Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
На статоре расположено несколько обмоток. При подаче напряжения на катушку, под воздействием магнитного поля ротор поворачивается на определенный угол в соответствии с пространственным положением обмотки. При ее обесточивании и подаче управляющего сигнала на другую катушку вращающаяся часть электродвигателя занимает другую позицию. Каждый поворот вала соответствует углу шага. При обратной последовательности подачи напряжения на катушки ротор вращается в противоположном направлении.
Для поворота ротора на меньший угол одновременно включаются 2 обмотки. Количество шагов ограничено и зависит от числа полюсов статора электромотора. Для обеспечения плавного вращения ротора на катушки статора подают разные токи, разность которых определяет положение ротора. Такой способ управления позволяет снизить дискретность и увеличить количество шагов до 400.
К числу недостатков шаговых двигателей можно отнести довольно низкую скорость, пропуск шагов при высокой (выше расчетной) нагрузке на валу, снижение момента при высокой частоте вращения и большое время разгона.
Устройство сервопривода
Сервопривод состоит из синхронного двигателя, датчика скорости и положения, а также управляющего контроллера. Основная разница между шаговым двигателем и сервоприводом состоит в наличии обратной связи по положению, скорости, моменту на валу ротора.
Электропривод такого типа построен на базе следящей схемы автоматического регулирования. При несоответствии скорости или другой величины контроллер будет подавать сигналы на отработку, пока требуемый параметр или положение вала не будет соответствовать заданному. В качестве датчика обратной связи используют абсолютные и относительные энкодеры различных типов и конструкций.

Принцип действия сервопривода
Управляющее устройство в соответствии с заданной программой подает напряжение на сервопривод, который соединен с порталом станка. Двигатель перемещает рабочий орган. При этом энкодер вырабатывает импульсы, поступающие на контроллер. Подсчет их числа осуществляет управляющее устройство. Количество импульсов пропорционально перемещению портала. При достижении рабочим органом заданного положения на электромотор перестает поступать напряжение. Портал фиксируется. Пока число импульсов, зафиксированных контроллером с датчика, не достигнет запрограммированной величины, двигатель будет осуществлять перемещение рабочего органа.
Шаговый сервопривод можно также настроить на поддержание постоянной частоты вращения вне зависимости от нагрузки или постоянного момента при разной скорости.
К достоинствам сервоприводов относятся точность позиционирования, динамика разгона и отсутствие снижения момента при высоких скоростях. Ограничивает применение сервопривода, как правило, достаточно большая стоимость.
Чем отличается сервопривод от шагового двигателя?
| Критерий сравнения | Шаговые двигатели | Сервоприводы |
|---|---|---|
| Эксплуатационный ресурс | Шаговые электромоторы не имеют коллекторного узла, подверженного износу. Также они не имеют частей, нуждающихся в регулярном техобслуживании и замене | Коллекторные серводвигатели необходимо регулярно обслуживать. Максимальный срок службы коллекторного узла — 5000 часов непрерывной работы. При этом бесщеточные сервомоторы не уступают в надежности шаговым двигателям |
| Точность перемещений исполнительного органа | ||
| Время разгона и скорость перемещения портала | ||
| Реакция на принудительную остановку | Шаговые двигатели хорошо переносят механические перегрузки и не выходят из строя при аварийных остановках | Сервоприводы необходимо оснащать дополнительной защитой, отключающей электромотор при принудительной остановке портала. В противном случае обмотки электрической машины могут сгореть |
| Стоимость | За счет простоты конструкции шаговый двигатель имеет относительно невысокую цену | За счет датчиков обратной связи (энкодеров) и более сложной схемы регулирования сервопривод считается дорогостоящим оборудованием |
Критерии выбора
Тип приводного двигателя для станков выбирают по следующим характеристикам:
По этому параметру сервоприводы значительно превосходят шаговые электромоторы. На станок с ЧПУ для обработки крупных деталей или заготовок из твердых материалов лучше уставить сервомотор, например, ESTUN 1000 Вт. Такой электропривод обеспечит более высокую скорость обработки твердых материалов. Для малогабаритного промышленного оборудования (например, настольного фрезерного станка) среднего класса точности, предназначенного для обработки мягких материалов, лучше выбрать шаговый двигатель.
Программирование и настройка сервопривода на станке с ЧПУ требуют высокой квалификации исполнителя. Такой привод намного дороже в обслуживании, соответственно расходы на его эксплуатацию будут выше.
Сервоприводы для станков с ЧПУ необходимы для высокоточной автоматизированной обработки. Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
Стоимость шагового двигателя значительно ниже цены сервопривода. При невысоком бюджете лучше предпочесть первый вариант.
По этому показателю сервомоторы предпочтительней. Работа шаговых электродвигателей сопровождается звуком, соответствующим частоте шагов на различных оборотах.
Таким образом, выбор сервопривода или шагового двигателя в качестве привода на фрезерно-гравировальный станок и оборудование для плазменной резки следует совершать, руководствуясь исключительно экономической и технической целесообразностью.




Предприятие MULTICUT образовано в 2009 году с целью организации выпуска отечественных координатных установок с ЧПУ для решения различных производственных задач.
подробнее о производстве







