- Современные синхронные реактивные двигатели
- Принцип работы синхронного двигателя
- Принцип работы синхронного двигателя
- Строение синхронного двигателя
- Принципы работы синхронного двигателя
- Способы запуска
- Применение
- Устройство и принцип действия синхронного двигателя
- Отличие от асинхронного мотора
- Конструкция мотора
- Как работает двигатель
- Синхронные генераторы
- Полюсы обмоток двигателя
- Воздействие полюсов
- Запуск электродвигателей синхронного типа
- Более современный способ разгона
- Преимущества и недостатки синхронных моторов
Современные синхронные реактивные двигатели
Принцип работы синхронного реактивного двигателя
В синхронных реактивных электродвигателях принцип создания момента вращения ротора несколько отличается от асинхронных и традиционных синхронных двигателей. Здесь решающая роль отводится самому сердечнику ротора.
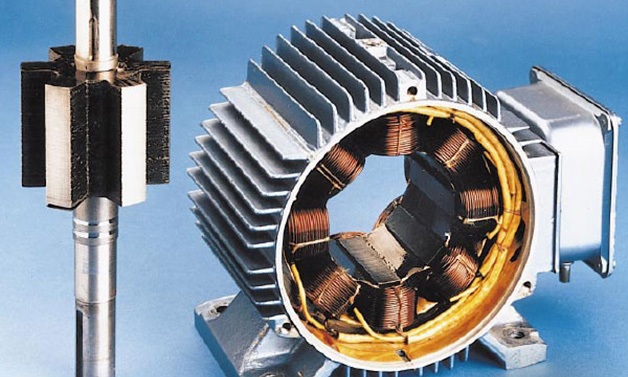
Ротор реактивного синхронного двигателя не имеет обмоток, даже короткозамкнутой обмотки на нем нет. Вместо этого сердечник ротора сделан сильно неоднородным по магнитной проводимости: магнитная проводимость вдоль ротора отличается от магнитной проводимости поперек. Благодаря такому необычному подходу отпадает необходимость как в обмотках ротора, так и в постоянных магнитах на нем.
Что касается статора, то обмотка статора реактивного синхронного двигателя может быть сосредоточенной либо распределенной, при этом сердечник статора и корпус остаются обычными. Вся особенность — в сильно неоднородном сердечнике ротора.
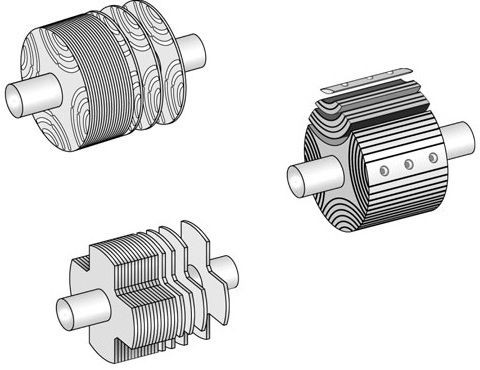
Для реактивных синхронных двигателей характерны три основных типа роторов: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор.
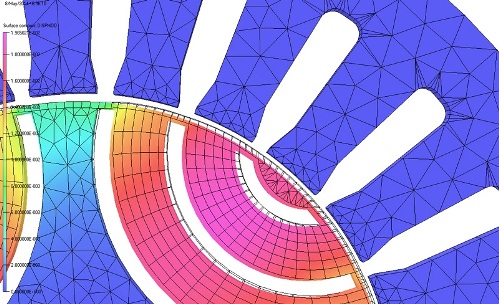
Физика процесса следующая. Переменный ток подается на обмотки статора, и создает вокруг ротора вращающееся магнитное поле, которое максимально в воздушном зазоре между статором и ротором. Момент вращения получается благодаря тому, что ротор все время пытается повернуться так, чтобы магнитное сопротивление для формируемого статором магнитного потока оказалось бы минимальным.
Максимальный момент вращения оказывается прямо пропорциональным разнице между продольной и поперечной индуктивностями, и чем больше эта разница, тем большим получается вращающий момент ротора.
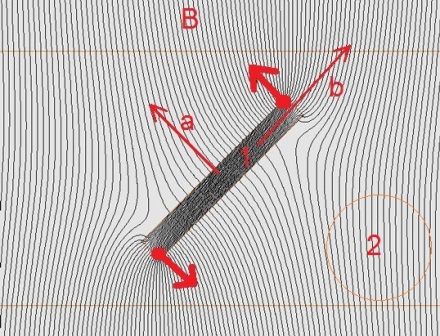
Для понимания данного принципа обратимся к рисунку. Анизотропный объект 1 обладает различной магнитной проводимостью по осям a и b. При этом изотропный объект 2 обладает одинаковой магнитной проводимостью по всем направлениям. Приложенное к объекту 1 магнитное поле порождает момент вращения когда угол между осью b и линиями магнитной индукции B не равен нулю. Когда неравный нулю угол существует, объект 1 станет искажать приложенное магнитное поле B, и направление искажения будет совпадать с осью a объекта 1.

Синусоидальное магнитное поле, создаваемое в синхронном реактивном двигателе обмоткой статора, вращается с определенной синхронной угловой частотой, и следовательно всегда будет иметь место момент вращения, стремящийся вернуть систему в состояние с наименьшим значением полной потенциальной энергии.
То есть момент вращения будет все время стремиться уменьшить искажение магнитного поля статора в направлении оси a, путем уменьшения угла между линиями индукции B и осью b. Так, если управление двигателем направлено на сохранение постоянства этого угла, то и механическая энергия постоянно будет получаться из электромагнитной.
Таким образом, ток обмотки статора обеспечивает намагничивание с существованием вращающего момента, направленного на устранение искаженности поля, и управляя фазой тока в соответствии с положением ротора во вращающейся системе координат (в соответствии со значением угла искажений), получается управление моментом синхронного реактивного электродвигателя.
Синхронные реактивные электродвигатели сегодня
Ведущие мировые производители электродвигателей на сегодняшний день проявляют особый интерес к синхронным реактивным электродвигателям, хотя запатентованы первые версии были еще в конце 19 века. Дело в том, что КПД синхронных реактивных электродвигателей принципиально значительно превышает КПД популярных асинхронных электродвигателей, не говоря уже об удельной мощности.
Потери энергии в роторе отсутствуют, а ведь обычно процентов 30 потерь приходится именно на ротор. Так повышается и срок службы электродвигателя — снижается вредный нагрев. Масса синхронного реактивного электродвигателя и его габариты на 20% меньше чем у асинхронного той же мощности.

Возобновленный интерес к синхронным реактивным электродвигателям в наши дни связан прежде всего с широкими возможностями современного компьютерного моделирования, позволяющими находить наиболее эффективные версии конструкций роторов и статоров — научные исследования получаются более продуктивными, и КПД современных версий синхронных реактивных двигателей уже достигает 98%, в то время как для асинхронных версий КПД традиционно не превышает 90%.
Синхронные реактивные двигатели изготавливают сегодня на базе асинхронных, и при тех же габаритах и установочно-присоединительных размерах получается более высокий КПД, достигается более высокая удельная мощность.
Преимущества и недостатки
Набранный из тонколистовой электротехнической стали, ротор реактивного синхронного двигателя имеет простую и надежную конструкцию без короткозамкнутой обмотки и без магнитов, поэтому в роторе исключены токи вызывающие вредный нагрев, — срок службы повышается, а отсутствие магнитов удешевляет себестоимость продукта, включая до минимума сниженные затраты на техобслуживание.
Благодаря сравнительной легкости ротора, его собственный момент инерции низок, поэтому двигатель быстрее разгоняется до номинальных оборотов, что приводит к экономии электроэнергии.
Частотный преобразователь в качестве регулятора скорости делает управление двигателем очень гибким в широком диапазоне рабочих скоростей. Что касается недостатков, то он всего один: потребность в преобразователе частоты.
Применение преобразователя частоты с активной коррекцией коэффициента мощности позволяет добиться максимального коэффициента мощности системы, что очень важно на любом современном производстве.
Принцип работы синхронного двигателя
Принцип работы синхронного двигателя
В целом, электрический двигатель представляет собой электромеханическое устройство, которое преобразовывает электрическую энергию в механическую.
По типу подключения двигатели бывают однофазные и 3-х фазные. Среди 3-х фазных двигателей наиболее распространенными являются индукционные (асинхронные) и синхронные электродвигатели.
Когда в 3-х фазном двигателе электрические проводники располагаются в определенном геометрическом положении (под определенным углом относительно друг друга), возникает электрическое поле. Образованное электромагнитное поле вращается с определенной скоростью, которая называется синхронной скоростью.
Если в этом вращающемся магнитном поле присутствует электромагнит, он магнетически замыкается с этим вращающимся полем и вращается со скоростью этого поля. Фактически, это нерегулируемый двигатель, поскольку он имеет всего одну скорость, которая является синхронной, и никаких промежуточных скоростей там быть не может. Другими словами, он работает синхронно с частотой сети.
Ниже дана формула синхронной скорости:
Строение синхронного двигателя
Его строение практически аналогично 3-фазному асинхронному двигателю, за исключением того факта, что на ротор подается источник постоянного тока.
На рисунке показано устройство этого типа двигателя. На статор подается 3-х фазное напряжение, а на ротор – источник постоянного тока.
Строение синхронного двигателя
Основные свойства синхронных двигателей:
- Синхронные электродвигатели не являются самозапускающимся механизмом. Они требуют определенного внешнего воздействия, чтобы выработать определенную синхронную скорость.
- Двигатель работает синхронно с частотой электрической сети. Поэтому при обеспечении бесперебойного снабжения частоты он ведет себя так, как двигатель с постоянной скоростью.
- Этот двигатель имеет уникальные характеристики, функционируя под любым коэффициентом мощности. Поэтому они используются для увеличения фактора силы.
Видео: Строение и принцип работы синхронного двигателя
Принципы работы синхронного двигателя
Электронно-магнитное поле синхронного двигателя обеспечивается двумя электрическими вводами. Это обмотка статора, которая состоит из 3-х фаз и предусматривает 3 фазы источника питания и ротор, на который подается постоянный ток.
3 фазы обмотки статора обеспечивают вращение магнитного потока. Ротор принимает постоянный ток и производит постоянный поток. При частоте 50 Гц 3-х фазный поток вращается около 3000 оборотов в 1 минуту или 50 оборотов в 1 секунду. В определенный момент полюса ротора и статора могут быть одной полярности (++ или – – ), что вызывает отталкивания ротора. После этого полярность сразу же меняется (+–), что вызывает притягивание.
Но ротор по причине своей инерции не в состоянии вращаться в любом направлении из-за силы притяжения или силы отталкивания и не может оставаться в состоянии простоя. Он не самозапускающийся.
Чтобы преодолеть инерцию силы, необходимо определенное механическое воздействие, которое вращает ротор в том же направлении, что и магнитное поле, обеспечивая необходимую синхронную скорость. Через некоторое время происходит замыкание магнитного поля, и синхронный двигатель вращается с определенной скоростью.
Способы запуска
- Пуск синхронного двигателя при помощи вспомогательного двигателя. Синхронный двигатель механически соединяется с другим двигателем. Это может быть либо 3-х фазный индукционный двигатель, либо двигатель постоянного тока. Постоянный ток изначально не подается. Двигатель начинает вращаться со скоростью, близкой к синхронной скорости, после чего подается постоянный ток. После того, как магнитное поле замыкается, связь со вспомогательного двигателя прекращается.
- Асинхронный пуск. В полюсных наконечниках полюсов ротора устанавливается дополнительная короткозамкнутая обмотка. При включении напряжения в обмотку статора возникает вращающееся магнитное поле. Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.
Применение
- Синхронный двигатель используется для улучшения коэффициента мощности. Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
- Синхронные двигатели находят свое применение там, где рабочая скорость не превышает 500 об / мин и требуется увеличить мощность. Для энергетической потребности от 35 кВт до 2500 кВт, стоимость, размер, вес и соответствующего индукционного двигателя будет довольно высоким. Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
Устройство и принцип действия синхронного двигателя
Отличие от асинхронного мотора
Главное отличие синхронной машины заключается в том, что скорость вращения якоря такая же, как и аналогичная характеристика магнитного потока.
И если в асинхронных моторах используется короткозамкнутый ротор, то в синхронных имеется на нем проволочная обмотка, к которой подводится переменное напряжение.
В некоторых конструкциях используются постоянные магниты. Но это делает двигатель дороже.
Если увеличивать нагрузку, подключаемую к ротору, частота вращения его не изменится. Это одна из ключевых особенностей такого типа машин. Обязательное условие – у движущегося магнитного поля должно быть столько же пар полюсов, сколько у электромагнита на роторе. Именно это гарантирует постоянную угловую скорость вращения этого элемента двигателя. И она не будет зависеть от момента, приложенного к нему.
Конструкция мотора
Устройство и принцип действия синхронных двигателей несложны.
Конструкция включает в себя такие элементы:
- Неподвижная часть – статор. На ней находится три обмотки, которые соединяются по схеме «звезда» или «треугольник». Статор собран из пластин электротехнической стали с высокой степенью проводимости.
- Подвижная часть – ротор. На нем тоже имеется обмотка. При работе на нее подается напряжение.
Между ротором и статором имеется прослойка воздуха. Она обеспечивает нормальное функционирование двигателя и позволяет магнитному полю беспрепятственно воздействовать на элементы агрегата. В конструкции присутствуют подшипники, в которых вращается ротор, а также клеммная коробка, расположенная в верхней части мотора.
Как работает двигатель
Если кратко, принцип действия синхронного двигателя, как и любого другого, заключается в преобразовании одного вида энергии в другой. А конкретно – электрической в механическую. Работает мотор таким образом:
- На статорные обмотки подается переменное напряжение. Оно создает магнитное поле.
- На обмотки ротора также подается переменное напряжение, создающее поле. Если используются постоянные магниты, то это поле уже по умолчанию имеется.
- Два магнитных поля взаимопересекаются, противодействуют друг другу – одно толкает другое. Из-за этого двигается ротор. Именно он установлен на шарикоподшипниках и способен свободно вращаться, дать ему нужно только толчок.
Вот и все. Теперь остается только использовать полученную механическую энергию в нужных целях. Но требуется знать, как правильно вывести в нормальный режим синхронный двигатель. Принцип работы у него отличается от асинхронного. Поэтому требуется придерживаться определенных правил.
Для этого электродвигатель подключают к оборудованию, которое необходимо привести в движение. Обычно это механизмы, которые должны работать практически без остановок – вытяжки, насосы и прочее.
Синхронные генераторы
Обратная конструкция – синхронные генераторы. В них процессы протекают немного иначе. Принцип действия синхронного генератора и синхронного двигателя отличаются, но не существенно:
- На обмотку статора не подается напряжение. С нее оно снимается.
- На обмотку ротора подается переменное напряжение, которое необходимо для создания магнитного поля. Потребление электроэнергии крайне маленькое.
- Ротор электрогенератора раскручивается при помощи дизельного или бензинового двигателя либо же силой воды, ветра.
- Вокруг ротора имеется магнитное поле, которое двигается. Поэтому в обмотке статора индуцируется ЭДС, а на концах появляется разность потенциалов.
Но в любом случае требуется стабилизировать напряжение на выходе генераторной установки. Для этого достаточно запитать роторную обмотку от источника, напряжение которого постоянно и не изменяется при колебаниях частоты вращения.
Полюсы обмоток двигателя
В конструкции ротора имеются постоянные или электрические магниты. Их обычно называют полюсами. На синхронных машинах (двигателях и генераторах) индукторы могут быть двух типов:
Они различаются между собой только взаимным расположением полюсов. Для уменьшения сопротивления со стороны магнитного поля, а также улучшения условий для проникновения потока, используются сердечники, изготовленные из ферромагнетиков.
Эти элементы располагаются как в роторе, так и в статоре. Для изготовления используются только сорта электротехнической стали. В ней очень много кремния. Это отличительная особенность такого вида металла. Это позволяет существенно уменьшить вихревые токи, повысить электрическое сопротивление сердечника.
Воздействие полюсов
В основе конструкции и принципа действия синхронных двигателей лежит обеспечение влияния пар полюсов ротора и статора друг на друга. Для обеспечения работы нужно разогнать индуктор до определенной скорости. Она равна той, с которой вращается магнитное поле статора. Именно это позволяет обеспечить нормальную работу в синхронном режиме. В момент, когда происходит запуск, магнитные поля статора и ротора взаимно пересекаются. Это называется «вход в синхронизацию». Ротор начинает вращаться со скоростью, как у магнитного поля статора.
Запуск электродвигателей синхронного типа
Самое сложное в работе синхронного мотора – это его запуск.
Именно поэтому его используют крайне редко. В
едь конструкция усложняется за счет системы запуска.
На протяжении долгого времени работа синхронного двигателя зависела от разгонного асинхронника, механически соединенным с ним.
Что это значит? Второй тип двигателя (асинхронный) позволял разогнать ротор синхронной машины до подсинхронной частоты.
Обычные асинхронники не требуют специальных устройств для запуска, достаточно только подать рабочее напряжение на обмотки статора.
После того, как будет достигнута требуемая скорость, происходит отключение разгонного двигателя. Магнитные поля, которые взаимодействуют в электрическом моторе, сами выводят его на работу в синхронном режиме. Для разгона потребуется другой двигатель. Его мощность должна составлять примерно 10-15 % от аналогичной характеристики синхронной машины. Если нужно вывести в режим электродвигатель 1 кВт, для него потребуется разгонный мотор мощностью 100 Вт. Этого вполне достаточно, чтобы машина смогла работать как в режиме холостого хода, так и с незначительной нагрузкой на валу.
Более современный способ разгона
Стоимость такой машины оказывалась намного выше. Поэтому проще использовать обычный асинхронный мотор, пусть и много у него недостатков. Но именно его принцип работы и был использован для уменьшения габаритов и стоимости всей установки. При помощи реостата производится замыкание обмоток на роторе. В итоге двигатель становится асинхронным. А запустить его оказывается намного проще – просто подается напряжение на обмотки статора.
Во время выхода на подсинхронную скорость возможно раскачивание ротора. Но это не происходит за счет работы его обмотки. Напротив, она выступает в качестве успокоителя. Как только частота вращения будет достаточной, производится подача постоянного напряжения на обмотку индуктора. Двигатель выводится в синхронный режим. Но такой способ можно воплотить только в том случае, если используются моторы с обмоткой на роторе. Если там применяется постоянный магнит, придется устанавливать дополнительный разгонный электродвигатель.
Преимущества и недостатки синхронных моторов
Основное преимущество (если сравнивать с асинхронными машинами) – за счет независимого питания роторной обмотки агрегаты могут работать и при высоком коэффициенте мощности. Также можно выделить такие достоинства, как:
- Снижается ток, потребляемый электродвигателем, увеличивается КПД. Если сравнивать с асинхронным мотором, то эти характеристики у синхронной машины оказываются лучше.
- Момент вращения прямо пропорционален напряжению питания. Поэтому даже если снижается напряжение в сети, нагрузочная способность оказывается намного выше, нежели у асинхронных машин. Надежность устройств такого типа существенно выше.
Но вот имеется один большой недостаток – сложная конструкция. Поэтому при производстве и последующих ремонтах затраты окажутся выше. Кроме того, для питания обмотки ротора обязательно требуется наличие источника постоянного тока. А регулировать частоту вращения ротора можно только с помощью преобразователей – стоимость их очень высокая. Поэтому синхронные моторы используются там, где нет необходимости часто включать и отключать агрегат.







