Устройство кольцевого транспортера с линейным асинхронным двигателем
Рейтинг 2.9/5 (81 голосов)
 Линейный двигатель является электрической машиной, принцип работы которой основан на использовании энергии бегущего магнитного поля. Основное преимущество таких двигателей состоит в отсутствии кинематических цепей для преобразования вращательного движения в линейное, что существенно упрощает конструкцию приводимого в движение механизма и повышает его КПД. Существует большое разнообразие линейных двигателей. В настоящее время больший интерес проявляется к асинхронным линейным двигателям как относительно простым по конструкции.
Линейный двигатель является электрической машиной, принцип работы которой основан на использовании энергии бегущего магнитного поля. Основное преимущество таких двигателей состоит в отсутствии кинематических цепей для преобразования вращательного движения в линейное, что существенно упрощает конструкцию приводимого в движение механизма и повышает его КПД. Существует большое разнообразие линейных двигателей. В настоящее время больший интерес проявляется к асинхронным линейным двигателям как относительно простым по конструкции.
Эти двигатели можно представить как разрезанную по образующей и развернутую в плоскость обычную асинхронную машину вращательного движения. Развернутый в плоскость статор асинхронного двигателя является первичным элементом, а развернутый ротор вторичным элементом линейного двигателя (рис. 1).
Стальной сердечник первичного элемента выполняется шихтованным, а в его пазах укладывается многофазная (обычно трехфазная) обмотка. Вторичный элемент выполняется с короткозамкнутой обмоткой, уложенной в пазы стального сердечника, или представляет собой сплошную токопроводящую пластину. Пластина изготовляется из меди, алюминия или ферромагнитной стали. При включении обмотки первичного элемента в многофазную сеть образуется магнитное поле, которое перемещается вдоль магнитопровода со скоростью
где τ — полюсное деление;
f1 — частота питающего напряжения.
При своем перемещении магнитное поле индуктирует во вторичном элементе машины ЭДС. Эта ЭДС вызывает токи, от взаимодействия которых с магнитным полем образуется механическая сила (тяговое усилие), стремящаяся сдвинуть элементы относительно друг друга.
В линейном двигателе в зависимости от его конструкции и назначения возможно относительное перемещение как первичного, так и вторичного элемента. Как и в обычном асинхронном двигателе, перемещение элемента происходит с некоторым скольжением относительно поля
S = (v1 — v) / v1
где v — скорость движения элемента.
Номинальное скольжение линейного двигателя равно 2-6%.
На работу линейного двигателя оказывают существенное влияние краевые эффекты, возникающие из-за конечных размеров разомкнутых магнитопроводов элементов. Это приводит к ухудшению таких характеристик, как тяговое усилие, коэффициент мощности и КПД.
Линейные двигатели могут быть успешно применены на ленточных и тележечных конвейерах, в приводах эскалаторов и движущихся тротуаров, в металлорежущих и ткацких станках, где рабочие органы совершают возвратно-поступательное движение. Большие перспективы имеет применение линейных двигателей для транспорта. Основным преимуществом линейного двигателя в этом случае является
возможность получения высоких скоростей движения до 400-500 км/ч.
Линейные асинхронные двигатели
Подвижная часть линейного двигателя совершает поступательное движение, поэтому применение этих двигателей для привода рабочих машин с поступательным движением рабочего органа позволяет упростить кинематику механизмов, уменьшим потери в передачах и повысить надежность механизма в целом.
Возможны линейные двигатели четырех видов: электромагнитные (соленоидные), магнитоэлектрические (с применением постоянного магнита), электродинамические и асинхронных. Асинхронные (индукционные) линейные двигатели благодаря простоте конструкции и высокой надежности получили наибольшее применение.
Для объяснения принципа работы линейного асинхронного двигателя обратимся к асинхронному двигателю с вращательным движением ротора. Если статор этого двигателя (рис. 17.10, а) мысленно «разрезать» и «развернуть» так, чтобы он образовал дугу с углом α (рис. 17.10, б), то диаметр ротора увеличится. При этом мы получим асинхронный двигатель с дуговым статором Частота вращения (об/мин) магнитного поля статора этого двигателя (синхронная частота)
где n 0 1 — синхронная частота вращения обычного (до «разрезания») асинхронного двигателя, об/мин; α — угол дуги статора, рад.
Из (17.6) следует, что, изменяя угол α, можно получить дуговой асинхронный двигатель на любую синхронную частоту меньше частоты вращения n 0 1. Дуговые двигатели применяют для безредукторного привода устройств, требующих небольших частот вращения, исключив применение сложного и трудоемкого редуктора.
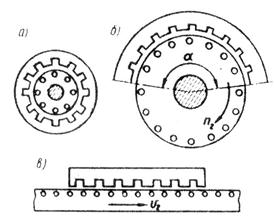
Рис. 17.10. К понятиям о дуговом и линейном двигателях
Если же «разрезанный» статор развернуть в плоскость, то получим асинхронный линейный двигатель (рис. 17.10, в). Принципиальное конструктивное отличие линейного асинхронного двигателя от асинхронного двигателя с вращательным движением ротора
состоит в том, что первичный элемент линейного двигателя (индуктор) создает не вращающееся, а бегущее магнитное поле и нижняя часть двигателя с короткозамкнутой обмоткой (или без нее) называемая вторичным элементом, перемещается вдоль своей оси. Скорость бегущего поля в линейном двигателе (м/с)
где f1 — частота тока в обмотке статора, Гц; τ — полюсное деление; Lc — длина статора (индуктора), м.
Принцип действия линейного асинхронного двигателя основан на том, что бегущее поле индуктора, сцепляясь с короткозамкнутой обмоткой вторичного элемента двигателя, наводит в ней ЭДС. Возникающие в стержнях этой обмотки токи взаимодействуют с бегущим полем индуктора и создают на индукторе и вторичном элементе электромагнитные силы, стремящиеся линейно переместить подвижную часть двигателя относительно неподвижной. В некоторых конструкциях линейных двигателей подвижной частью является индуктор, а в некоторых — вторичный элемент, называемый в этом случае бегунком. Если вторичный элемент линейного двигателя невозможно изготовить с короткозамкнутой обмоткой, то применяют вторичные элементы в виде полосы из меди, алюминия или ферромагнитной стали. Наиболее удовлетворительными получаются характеристики линейного двигателя при составном вторичном элементе, например выполненном в виде полосы из ферромагнитной стали, покрытой слоем меди.
Основной недостаток асинхронных двигателей с разомкнутым статором — дуговых и линейных — явление краевого эффекта, представляющего собой комплекс электромагнитных процессов, обусловленных разомкнутой конструкцией статора. К нежелательным последствиям краевого эффекта в первую очередь следует отнести появление «паразитных» тормозных усилий, направленных против движения подвижной части двигателя, и возникновение поперечных сил, стремящихся сместить подвижную часть двигателя в поперечном направлении. Кроме того, краевой эффект вызывает ряд других нежелательных явлений, ухудшающих рабочие характеристики линейных двигателей.
Линейные асинхронные двигатели применяют для привода заслонок, ленточных конвейеров, подъемно-транспортных механизмов. На рис. 17.11 показано устройство линейного асинхронного двигателя привода тележки подъемного крана. На тележке 3 расположен индуктор линейного двигателя, состоящий из шихтованного сердечника 6, в пазах которого расположена обмотка 5. Направляющая для колес 2 представляет собой стальную балку 7, к нижней части которой прикреплена стальная полоса 4. Бегущее магнитное поле индуктора наводит в стальной полосе 4 вихревые токи. Электромагнитные силы, возникающие в результате взаимодействия этих токов с магнитным полем индуктора, перемещают индуктор (тележку) вдоль стальной полосы 4.
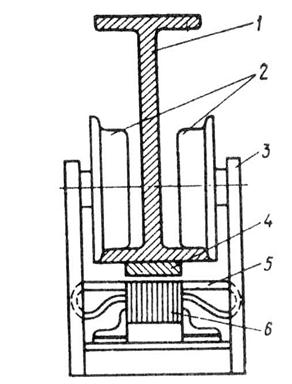
Рис. 17.11. Линейный асинхронный двигатель
привода тележки подъемного крана
Линейные асинхронные двигатели значительной мощности применяют на транспорте в качестве тяговых двигателей. Один из вариантов такого двигателя показан на рис. 17.12. Здесь индуктор 2 двигателя подвешен к транспортному средству 1, а стальная полоса 3 установлена вертикально на основании пути между рельсами. Из этой конструкции поперечная сила Fп вызванная краевым эффектом используется полезно, так как она уменьшает силу давления на несущие оси и колеса и, как следствие, уменьшает трение качения.

Рис 17.12. Линейный асинхронный двигатель
привода железнодорожного транспортного средства
Контрольные вопросы
1.В чем различие между схемами соединения индукционного регулятора напряжения и фазорегулятора?
2.Сколько раз напряжение на выходе ИР достигнет наибольшего значения за один оборот ротора, если обмотка имеет 2р = 6?
3.В каком направлении следует вращать ротор АПЧ, чтобы на выходе получить ЭДС частотой, большей частоты тока в сети?
4.Какую долю мощности на выходе АПЧ составит мощность приводного двигателя, если частота тока на входе АПЧ равна 50 Гц, а на выходе — 100 Гц?
5.Объясните работу сельсинов в индикаторной системе передачи. Чем вызвана ошибка в воспроизведении угла поворота?
6.Чем обеспечивается отсутствие самохода в асинхронном исполнительном двигателе?

7.Объясните принцип работы асинхронного линейного двигателя.
8.Что такое краевой эффект и каковы его нежелательные действия в линейном асинхронном двигателе?
ГЛАВА 18
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Линейные асинхронные двигатели
Подвижная часть линейного двигателя совершает поступательное движение, поэтому применение этих двигателей для привода рабочих машин с поступательным движением рабочего органа позволяет упростить кинематику механизмов, уменьшим потери в передачах и повысить надежность механизма в целом.
Возможны линейные двигатели четырех видов: электромагнитные (соленоидные), магнитоэлектрические (с применением постоянного магнита), электродинамические и асинхронных. Асинхронные (индукционные) линейные двигатели благодаря простоте конструкции и высокой надежности получили наибольшее применение.
Для объяснения принципа работы линейного асинхронного двигателя обратимся к асинхронному двигателю с вращательным движением ротора. Если статор этого двигателя (рис. 17.10, а) мысленно «разрезать» и «развернуть» так, чтобы он образовал дугу с углом α (рис. 17.10, б), то диаметр ротора увеличится. При этом мы получим асинхронный двигатель с дуговым статором Частота вращения (об/мин) магнитного поля статора этого двигателя (синхронная частота)
где n 0 1 — синхронная частота вращения обычного (до «разрезания») асинхронного двигателя, об/мин; α — угол дуги статора, рад.
Из (17.6) следует, что, изменяя угол α, можно получить дуговой асинхронный двигатель на любую синхронную частоту меньше частоты вращения n 0 1. Дуговые двигатели применяют для безредукторного привода устройств, требующих небольших частот вращения, исключив применение сложного и трудоемкого редуктора.

Рис. 17.10. К понятиям о дуговом и линейном двигателях
Если же «разрезанный» статор развернуть в плоскость, то получим асинхронный линейный двигатель (рис. 17.10, в). Принципиальное конструктивное отличие линейного асинхронного двигателя от асинхронного двигателя с вращательным движением ротора
состоит в том, что первичный элемент линейного двигателя (индуктор) создает не вращающееся, а бегущее магнитное поле и нижняя часть двигателя с короткозамкнутой обмоткой (или без нее) называемая вторичным элементом, перемещается вдоль своей оси. Скорость бегущего поля в линейном двигателе (м/с)
где f1 — частота тока в обмотке статора, Гц; τ — полюсное деление; Lc — длина статора (индуктора), м.
Принцип действия линейного асинхронного двигателя основан на том, что бегущее поле индуктора, сцепляясь с короткозамкнутой обмоткой вторичного элемента двигателя, наводит в ней ЭДС. Возникающие в стержнях этой обмотки токи взаимодействуют с бегущим полем индуктора и создают на индукторе и вторичном элементе электромагнитные силы, стремящиеся линейно переместить подвижную часть двигателя относительно неподвижной. В некоторых конструкциях линейных двигателей подвижной частью является индуктор, а в некоторых — вторичный элемент, называемый в этом случае бегунком. Если вторичный элемент линейного двигателя невозможно изготовить с короткозамкнутой обмоткой, то применяют вторичные элементы в виде полосы из меди, алюминия или ферромагнитной стали. Наиболее удовлетворительными получаются характеристики линейного двигателя при составном вторичном элементе, например выполненном в виде полосы из ферромагнитной стали, покрытой слоем меди.
Основной недостаток асинхронных двигателей с разомкнутым статором — дуговых и линейных — явление краевого эффекта, представляющего собой комплекс электромагнитных процессов, обусловленных разомкнутой конструкцией статора. К нежелательным последствиям краевого эффекта в первую очередь следует отнести появление «паразитных» тормозных усилий, направленных против движения подвижной части двигателя, и возникновение поперечных сил, стремящихся сместить подвижную часть двигателя в поперечном направлении. Кроме того, краевой эффект вызывает ряд других нежелательных явлений, ухудшающих рабочие характеристики линейных двигателей.
Линейные асинхронные двигатели применяют для привода заслонок, ленточных конвейеров, подъемно-транспортных механизмов. На рис. 17.11 показано устройство линейного асинхронного двигателя привода тележки подъемного крана. На тележке 3 расположен индуктор линейного двигателя, состоящий из шихтованного сердечника 6, в пазах которого расположена обмотка 5. Направляющая для колес 2 представляет собой стальную балку 7, к нижней части которой прикреплена стальная полоса 4. Бегущее магнитное поле индуктора наводит в стальной полосе 4 вихревые токи. Электромагнитные силы, возникающие в результате взаимодействия этих токов с магнитным полем индуктора, перемещают индуктор (тележку) вдоль стальной полосы 4.

Рис. 17.11. Линейный асинхронный двигатель
привода тележки подъемного крана
Линейные асинхронные двигатели значительной мощности применяют на транспорте в качестве тяговых двигателей. Один из вариантов такого двигателя показан на рис. 17.12. Здесь индуктор 2 двигателя подвешен к транспортному средству 1, а стальная полоса 3 установлена вертикально на основании пути между рельсами. Из этой конструкции поперечная сила Fп вызванная краевым эффектом используется полезно, так как она уменьшает силу давления на несущие оси и колеса и, как следствие, уменьшает трение качения.

Рис 17.12. Линейный асинхронный двигатель
привода железнодорожного транспортного средства
Контрольные вопросы
1.В чем различие между схемами соединения индукционного регулятора напряжения и фазорегулятора?
2.Сколько раз напряжение на выходе ИР достигнет наибольшего значения за один оборот ротора, если обмотка имеет 2р = 6?
3.В каком направлении следует вращать ротор АПЧ, чтобы на выходе получить ЭДС частотой, большей частоты тока в сети?
4.Какую долю мощности на выходе АПЧ составит мощность приводного двигателя, если частота тока на входе АПЧ равна 50 Гц, а на выходе — 100 Гц?
5.Объясните работу сельсинов в индикаторной системе передачи. Чем вызвана ошибка в воспроизведении угла поворота?
6.Чем обеспечивается отсутствие самохода в асинхронном исполнительном двигателе?
7.Объясните принцип работы асинхронного линейного двигателя.
8.Что такое краевой эффект и каковы его нежелательные действия в линейном асинхронном двигателе?
ГЛАВА 18
• Конструктивные формы исполнения электрических машин







