- Драйвер шагового двигателя — устройство, виды и возможности
- Что такое драйвер шагового двигателя?
- Digitrode
- цифровая электроника вычислительная техника встраиваемые системы
- Драйвер шагового двигателя: принцип работы, особенности, как выбрать драйвер
- Как управлять шаговым двигателем
- Универсальные микросхемы для управления шаговым двигателем
- Полнофункциональные драйверы шаговых двигателей
- Микрошаги
- Заключение
Драйвер шагового двигателя — устройство, виды и возможности
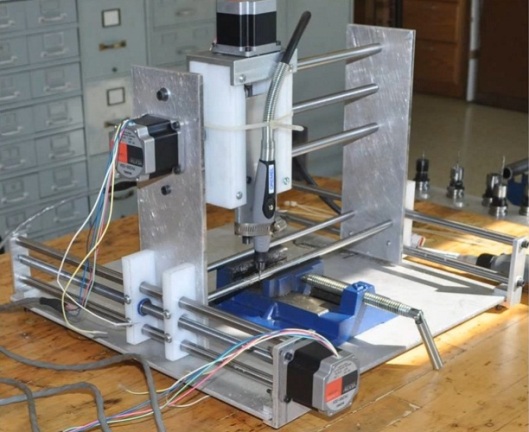
Шаговые двигатели применяются сегодня во многих промышленных сферах. Двигатели данного типа отличаются тем, что позволяют добиться высокой точности позиционирования рабочего органа, по сравнению с другими типами двигателей. Очевидно, что для работы шагового двигателя требуется точное автоматическое управление. Именно этой для этой цели и служат контроллеры шаговых двигателей , обеспечивающие бесперебойную и точную работу электроприводов различного назначения.

Грубо принцип работы шагового двигателя можно описать так. Каждый полный оборот ротора шагового двигателя состоит из нескольких шагов. Подавляющее большинство шаговых двигателей рассчитаны на шаг в 1,8 градуса, и на полный оборот приходится 200 шагов. Привод меняет положение на шаг при подаче на определенную обмотку статора напряжения питания. Направление вращения зависит от направления тока в обмотке.
Следующий шаг — выключается первая обмотка, питание подается на вторую и так далее, в итоге после отработки каждой обмотки ротор совершит полный оборот. Но это грубое описание, на деле алгоритмы несколько сложнее, и об этом будет рассказано далее.
Алгоритмы управления шаговым двигателем
Управление шаговым двигателем может быть реализовано по одному из четырех основных алгоритмов: попеременное включение фаз, управление с перекрытием фаз, полушаговое управление или микрошаговое управление.
В первом случае в каждый момент времени питание получает только одна из фаз, и точки равновесия ротора двигателя на каждом шагу совпадают с ключевыми точками равновесия — полюса отчетливо выражены.
Управление с перекрытием фаз позволяет ротору получить шаги к позициям между полюсными выступами статора, что увеличивает вращающий момент на 40% по сравнению с управлением без перекрытия фаз. Угол шага сохраняется, однако положение фиксации смещено — оно находится между полюсными выступами статора. Эти первые два алгоритма применяются в электротехническом оборудовании, где очень высокая точность не требуется.
Полушаговое управление — комбинация первых двух алгоритмов: через шаг питание получают то одна фаза (обмотка), то две. Размер шага уменьшается вдвое, точность позиционирования получается более высокой, снижается вероятность наступления механического резонанса в двигателе.
Наконец, микрошаговый режим. Здесь ток в фазах меняется по величине так, чтобы положение фиксации ротора на шаг приходилось бы на точку между полюсами, причем, в зависимости от соотношения величин токов в одновременно включенных фазах, таких шагов можно получить несколько. Регулируя соотношение токов, настраивая количество рабочих соотношений, получают микрошаги — наиболее точное позиционирование ротора.
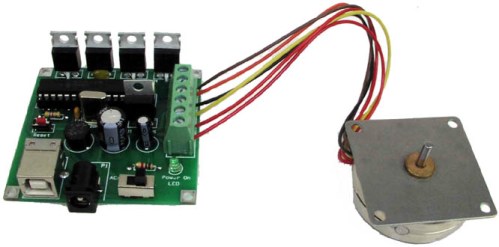
Драйвер шагового двигателя
Чтобы выбранный алгоритм реализовать практически, применяют драйвер шагового двигателя . Драйвер содержит в себе силовую часть и контроллер.
Силовая часть драйвера — это полупроводниковый усилитель мощности, задача которого преобразовать подаваемые на фазы импульсы тока в перемещения ротора: один импульс — один точный шаг или микрошаг.
Направление и величина тока — направление и величина шага. То есть задача силовой части — подать ток определенной величины и направления в соответствующую обмотку статора, удержать этот ток в течение некоторого времени, а также осуществлять быстрое включение и выключение токов, чтобы скоростные и мощностные характеристики привода соответствовали бы поставленной задаче.
Чем более совершенна силовая часть драйвера, тем больший момент можно получить на валу. Вообще, тренд прогресса в совершенствовании шаговых двигателей и их драйверов — получить от двигателей малых габаритов значительный рабочий момент, высокую точность, и сохранить при этом высокий КПД.
Контроллер шагового двигателя
Контроллер шагового двигателя — интеллектуальная часть системы, которая обычно изготовлена на базе микроконтроллера с возможностью перепрограммирования. Именно контроллер отвечает за то, в какой момент, на какую обмотку, на какое время, и какой величины ток будет подан. Контроллер управляет работой силовой части драйвера.
Продвинутые контроллеры подключаются к ПК, и могут регулироваться в режиме реального времени при помощи ПК. Возможность многократного перепрограммирования микроконтроллера избавляет пользователя от необходимости каждый раз при корректировке задачи приобретать новый контроллер — достаточно перенастроить уже имеющийся, в этом гибкость, контроллер можно легко переориентировать программно на выполнение новых функций.
На рынке сегодня представлены широкие модельные ряды контроллеров шаговых двигателей от различных производителей, отличающиеся возможностями расширения функций. Программируемые контроллеры предполагают запись программы, а некоторые включают в себя программируемые логические блоки, при помощи которых возможна гибкая настройка алгоритма управления шаговым двигателем под тот или иной технологический процесс.
Управление шаговым двигателем при помощи контроллера позволяет достичь высокой точности вплоть до 20000 микрошагов на оборот. Причем управление может осуществляться как напрямую с компьютера, так и за счет прошитой в устройство программы или по программе с карты памяти. Если параметры в ходе выполнения задачи меняются, то компьютер может опрашивать датчики, отслеживать меняющиеся параметры и оперативно изменять режим работы шагового двигателя.
Есть в продаже блоки управления шаговым двигателем, к которым подключаются: источник тока, кнопки управления, источник тактового сигнала, потенциометр для настройки шага и т. д. Такие блоки позволяют быстро интегрировать шаговый двигатель в оборудование для выполнения повторяющихся цикличных задач с ручным или автоматическим управлением. Возможность синхронизации с внешними устройствами и поддержка автоматического включения, выключения и управления — несомненное достоинство блока управления шаговым двигателем.
Блок может управляться с компьютера напрямую, если, например, требуется воспроизвести программу для станка с ЧПУ, или в ручном режиме без дополнительного внешнего управления, то есть автономно, когда направление вращения вала шагового двигателя устанавливается датчиком реверса, а скорость регулируется потенциометром. Блок управления подбирается по параметрам к шаговому двигателю, который предполагается использовать.
В зависимости от характера поставленной цели выбирают способ управления шаговым двигателем. Если необходимо настроить простое управление маломощным электроприводом, когда в каждый момент времени один импульс подается на одну катушку статора: на полный оборот нужно, скажем, 48 шагов, и ротор будет перемещаться на 7,5 градусов при каждом шаге. Режим одиночных импульсов в этом случае подойдет.
Для достижения более высокого вращающего момента применяют двойной импульс — в две соседние катушки подается одновременно по импульсу. И если для полного оборота нужно 48 шагов, то опять же нужно 48 таких двойных импульсов, каждый приведет к шагу в 7,5 градусов но с на 40% большим моментом нежели в режиме одиночных импульсов. Скомбинировав оба способа можно получить 96 импульсов разделив шаги — получится 3,75 градуса на шаг — это комбинированный режим управления (полушаговый).
Что такое драйвер шагового двигателя?
Драйвер шагового двигателя — электронное устройство, которое заставляет шаговый двигатель «шагать» по сигналам управления. Стандартом де-факто в области управления ШД являются сигналы STEP/DIR/ENABLE. STEP это сигнал шага, DIR это сигнал направления вращения, ENABLE это сигнал включения драйвера.
Более научное определение — драйвер шагового двигателя это электронное силовое устройство, которое на основании цифровых сигналов управления управляет сильноточными/высоковольтными обмотками шагового двигателя и позволяет шаговому двигателю делать шаги (вращаться).
Управлять ШД намного сложнее чем обычным коллекторным двигателем — нужно в определенной последовательности переключать напряжения в обмотках с одновременным контролем тока. Поэтому для управления ШД разработаны специальные устройства — драйверы ШД. Драйвер ШД позволяет управлять вращением ротора ШД в соответствии с сигналами управления и электронным образом делить физический шаг ШД на более мелкие дискреты.
К драйверу ШД подключается источник питания, сам ШД (его обмотки) и сигналы управления. Стандартом по сигналам управления является управление сигналами STEP/DIR или CW/CCW и сигнал ENABLE.
Сигнал STEP — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т.д.). Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал DIR — Потенциальный сигнал, сигнал направления. Логическая единица — ШД вращается по часовой стрелке, ноль — ШД вращается против часовой стрелки, или наоборот. Инвертировать сигнал DIR обычно можно либо из программы управления или поменять местами подключение фаз ШД в разъеме подключения в драйвере.
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) по часовой стрелке. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) против часовой стрелки. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал ENABLE — Потенциальный сигнал, сигнал включения/выключения драйвера. Обычно логика работы такая: логическая единица (подано 5В на вход) — драйвер ШД выключен и обмотки ШД обесточены, ноль (ничего не подано или 0В на вход) — драйвер ШД включен и обмотки ШД запитаны.
Драйверы ШД могут иметь дополнительные функции:
• Контроль перегрузок по току.
• Контроль превышения напряжения питания, защита от эффекта обратной ЭДС от ШД. При замедлении вращения, ШД вырабатывает напряжение, которое складывается с напряжением питания и кратковременно увеличивает его. При более быстром замедлении, напряжение обратной ЭДС больше и больше скачок напряжения питания. Этот скачок напряжения питания может привести к выходу из строя драйвера, поэтому драйвер имеет защиту от скачков питающего напряжения. При превышении порогового значения напряжения питания драйвер отключается.
• Контроль переполюсовки при подключении сигналов управления и питающих напряжений.
• Режим автоматического снижения тока обмотки при простое (отсутствии сигнала STEP) для снижения нагрева ШД и потребляемого тока (режим AUTO-SLEEP).
• Автоматический компенсатор среднечастотного резонанса ШД. Резонанс обычно проявляется в диапазоне 6-12 об/сек, ШД начинает гудеть и ротор останавливается. Начало и сила резонанса сильно зависит от параметров ШД и его механической нагрузки. Автоматический компенсатор среднечастотного резонанса позволяет полностью исключить резонирование ШД и сделать его вращение равномерным и устойчивым во всем диапазоне частот.
• Схему изменения формы фазовых токов с увеличением частоты (морфинг, переход из режима микрошага в режим шага при увеличении частоты). ШД способен отдать заявленный в ТХ момент только в режиме полного шага, поэтому в обычном драйвере ШД без морфинга при использовании микрошага ШД работает на 70% от максимальной мощности. Драйвер ШД с морфингом позволяет получить от ШД максимальную отдачу по моменту во всем диапазоне частот.
• Встроенный генератор частоты STEP – удобная функция для пробного запуска драйвера без подключения к ПК или другому внешнему генератору частоты STEP. Также генератор будет полезен для построения простых систем перемещения без применения ПК.
Digitrode
цифровая электроника вычислительная техника встраиваемые системы
Драйвер шагового двигателя: принцип работы, особенности, как выбрать драйвер
Как управлять шаговым двигателем
Стандартный шаговый двигатель с постоянными магнитами имеет две обмотки. Если в системе используется биполярный драйвер, вращение достигается путем подачи определенной последовательности сигналов прямого и обратного тока через две обмотки. Таким образом, для биполярного шагового двигателя требуется H-мост для каждой обмотки. В униполярном приводе используются четыре отдельных драйвера, и они не должны иметь возможность подавать ток в обоих направлениях: центр обмотки представляется как отдельное соединение двигателя, а каждый драйвер обеспечивает ток, протекающий от центра обмотки к концу обмотки. Ток, связанный с каждым драйвером, всегда течет в одном и том же направлении.

На рисунке выше представлен биполярный шаговый двигатель (слева) и униполярный (справа). Направление протекания тока в однополярной системе указывает на то, что центр каждой обмотки подключен к напряжению питания двигателя.
Универсальные микросхемы для управления шаговым двигателем
Первое, что нужно иметь в виду – это то, что микросхемы, предназначенные для основных функций управления двигателем могут использоваться с шаговыми двигателями. Вам не нужна микросхема, которая специально помечена или продается как устройство управления шаговым двигателем. Если вы используете биполярный привод, вам нужно два H-моста на шаговый двигатель; Если вы используете однополярный подход, вам нужно четыре драйвера для одного двигателя, но каждый драйвер может быть одним транзистором, потому что все, что вы делаете, это включаете и выключаете ток, а не меняете его направление.
Примером компонента в категории «универсальная микросхема» является DRV8803 от Texas Instruments. Это устройство описано как «драйверное решение для любого приложения переключения нижнего плеча».

В таком устройстве центр обмоток шагового двигателя подключен к напряжению питания, а к обмоткам подается питание путем включения транзисторов нижнего плеча, чтобы они позволяли току течь от источника питания через половину обмотки, далее через транзистор и на землю.
Подход с использованием универсальной микросхемы удобен, если у вас уже есть опыт работы с подходящим драйвером – вы можете сэкономить несколько долларов, повторно использовав старый компонент, или сэкономить время (и уменьшить вероятность ошибок проектирования), включив известную и проверенную микросхему в вашу цепь управления шаговым двигателем. Но более сложная микросхема может обеспечить расширенную функциональность и упростить задачу проектирования, поэтому предпочтительнее взять шаговый драйвер с дополнительными функциями.
Полнофункциональные драйверы шаговых двигателей
Высокоинтегрированные контроллеры шагового двигателя могут значительно сократить объем проектных работ, связанных с применением более мощных шаговых двигателей. Первая полезная особенность, которая приходит на ум – это автоматическая генерация управляющей последовательности, т.е. способность преобразовывать прямые входные сигналы управления двигателем в требуемые последовательности сигналов. Давайте рассмотрим L6208 от STMicroelectronics, в качестве примера.

Вместо логических входов, которые напрямую контролируют ток, подаваемый на обмотки двигателя, L6208 имеет:
- Вывод, который выбирает между полушагом и полным шагом.
- Вывод, который задает направление вращения.
- Вывод «синхроимпульса», который заставляет внутренний конечный автомат управления двигателем меняться на один шаг при появлении фронта сигнала.
Этот интерфейс гораздо более интуитивно понятен, чем фактические последовательности включения и выключения, которые применяются к транзисторам, подключенным к обмоткам (пример которых приведен ниже).

Это последовательность для управления биполярным шаговым двигателем. «A» и «B» относятся к двум обмоткам, а столбцы «Q» указывают состояние транзисторов, управляющих током обмотки.
Микрошаги
Как следует из названия, функция микрошага заставляет шаговый двигатель выполнять вращение, которое значительно меньше одного шага. Это может быть 1/4 шага или 1/256 шага или где-то посередине. Микрошаг гарантирует точное позиционирование двигателя и обеспечивает более плавное вращение. В некоторых приложениях микрошаг совершенно не нужен. Однако, если ваша система может извлечь выгоду из чрезвычайно точного позиционирования, более плавного вращения или уменьшения механического шума, вам следует рассмотреть возможность использования микросхемы драйвера с возможностью организации микрошагов.
TMC2202 от Trinamic является примером микрошагового контроллера шагового двигателя.

Размер шага может быть всего лишь 1/32 от полного шага, также здесь есть некоторая функциональность интерполяции, которая обеспечивает «полную плавность 256 микрошагов». Эта микросхема также дает вам представление о том, насколько сложным может быть шаговый драйвер – он имеет интерфейс UART для управления и диагностики, специализированный алгоритм драйвера, который улучшает работу в режиме ожидания и низкоскоростную работу, а также различные другие вещи, о которых вы можете прочитать в 81-страничной документации на TMC2202.
Заключение
Если у вас есть микроконтроллер для генерации последовательностей для управления шаговым двигателем и достаточно времени и мотивации для написания надежного кода, вы можете управлять шаговым двигателем с помощью дискретных полевых транзисторов. Тем не менее, почти во всех ситуациях предпочтительнее использовать какую-либо микросхему, и, поскольку на выбор имеется так много устройств и функций, у вас не должно возникнуть особых проблем с поиском компонента, подходящего для вашего приложения.







