- Современные бесколлекторные двигатели постоянного тока
- Бесколлекторный двигатель постоянного тока: особенности и принцип работы
- Как работает бесколлекторный двигатель?
- Возможные варианты и специальные случаи
- Отличия от других типов двигателей
- Когда нужен бесколлекторный двигатель?
- Обзор бесколлекторных двигателей: все, что нужно знать
- Выбор подходящего двигателя
- Принцип работы
- Устройство БКЭПТ
- Датчики и их отсутствие
- Датчик Холла
- Использование датчика положения с микроконтроллером
- Отсутствие датчика
- Понятие ШИМ частоты
- Система arduino
- Крепеж двигателя
Современные бесколлекторные двигатели постоянного тока
Благодаря существенному прогрессу в области полупроводниковой электроники и в технологии создания мощных неодимовых магнитов, широкое распространение получили сегодня бесколлекторные двигатели постоянного тока. Они применяются в стиральных машинах, пылесосах, вентиляторах, дронах и т. д.
И хотя идея касательно принципа работы бесколлекторного двигателя высказывалась еще в начале 19 века, она ждала своего часа до начала полупроводниковой эры, когда технологии стали готовы к практической реализации этой интересной и эффективной концепции, позволившей бесколлекторным двигателям постоянного тока шагать так широко, как это происходит сегодня.

В англоязычной версии двигатели данного типа именуются BLDC motor – Brushless Direct Current Motor — бесщеточный мотор постоянного тока. Ротор двигателя содержит постоянные магниты, а рабочие обмотки располагаются на статоре, то есть устройство BLDC мотора полностью противоположно тому, как это имеет место в классическом коллекторном двигателе. Управляется BLDC мотор электронным регулятором, который называют ESC — Electronic speed controller — электронный регулятор хода.
Электронный регулятор хода и высокий КПД
Электронный регулятор хода позволяет плавно варьировать электрическую мощность, подаваемую на бесколлекторный электродвигатель. В отличие от ранних, более простых версий резистивных регуляторов хода, которые просто ограничивали мощность путем включения в цепь последовательно с мотором активной нагрузки, превращающей избыточную мощность в тепло, электронный регулятор хода позволяет получить значительно более высокий КПД, не расходуя подводимую электрическую энергию на бесполезный нагрев.
Бесколлекторный двигатель постоянного тока можно классифицировать как самосинхронизируемый синхронный двигатель, в котором полностью исключен искрящий узел, требующий регулярного обслуживания — коллектор. Функцию коллектора несет на себе электроника, благодаря чему вся конструкция изделия сильно упрощается и становится компактнее.
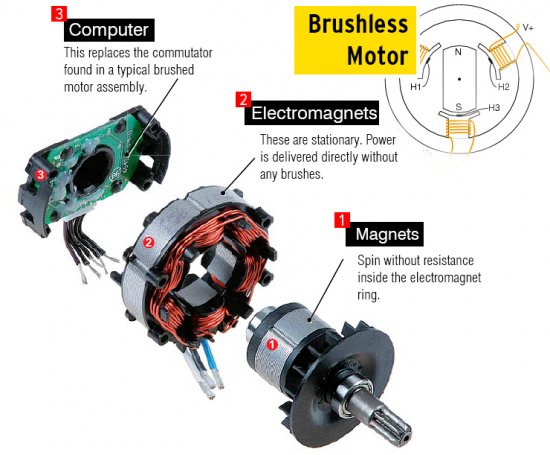
Щетки заменены, по сути, на электронные ключи, потери в которых сильно меньше чем были бы при механической коммутации. Мощные неодимовые магниты на роторе позволяют добиться большего момента на валу. И греется такой двигатель меньше нежели его коллекторный предшественник.
В итоге КПД двигателя получается наилучшим, а показатели мощности на килограмм веса — выше, плюс достаточно широкий диапазон регулировки скорости вращения ротора и практически полное отсутствие генерируемых радиопомех. Конструктивно двигатели данного типа легко адаптируются для эксплуатации в воде и в агрессивных средах.
Электронный блок управления — очень важная и дорогостоящая часть бесколлекторного двигателя постоянного тока, без которой, однако, никак не обойтись. От данного блока двигатель получает питание, параметры которого одновременно влияют и на скорость, и на мощность, которую двигатель будет в состоянии развить под нагрузкой.
Даже если скорость вращения регулировать не нужно, все равно электронный блок управления необходим, ведь он несет на себе не только функцию управления, но также имеет силовую составляющую. Можно сказать, что ESC – это аналог частотного регулятора для асинхронных двигателей переменного тока, специально предназначенный для питания и управления бесколлекторным мотором постоянного тока.
Управление двигателем BLDC
Чтобы понять как происходит управление BLDC двигателем, сначала вспомним как работает коллекторный двигатель. В его основе принцип вращения рамки с током в магнитном поле.
Каждый раз, когда рамка с током повернулась и нашла положение равновесия, коммутатор (щетки прижатые к коллектору) изменяет направление тока через рамку, и рамка движется дальше. Этот процесс повторяется при движении рамки от полюса к полюсу. Только вот в коллекторном двигателе таких рамок много и магнитных полюсов несколько пар, поэтому коллекторно-щеточный узел содержит не два контакта, а много.
Электронный блок управления бесколлекторным двигателем делает то же самое. Он изменяет полярность магнитного поля как только ротор необходимо провернуть дальше из положения равновесия. Только управляющее напряжение подается не на ротор, а на обмотки статора, и делается это при помощи полупроводниковых ключей в нужные моменты времени (фазы ротора).
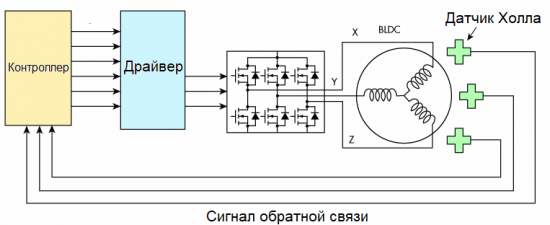
Очевидно, что ток на обмотки статора бесколлекторного двигателя необходимо подавать в правильные моменты времени, то есть тогда, когда ротор находится в определенном известном положении. Для этого применяется один из следующих методов. Первый — на основе датчика положения ротора, второй — путем измерения ЭДС на одной из обмоток, которая в данный момент не получает питание.
Датчики бывают разными, магнитными и оптическими, наиболее популярны магнитные датчики на основе эффекта Холла. Второй способ (на основе измерения ЭДС) хотя и эффективен, однако он не позволяет осуществлять точное управление на низких скоростях и при старте. А вот датчики Холла обеспечивают возможность более точного управления во всех режимах. В трехфазных BLDC двигателях таких датчиков три штуки.
Двигатели без датчиков положения ротора применимы в тех случаях, когда старт мотора происходит без нагрузки на валу (вентилятор, пропеллер и т. п.). Если же старт происходит под нагрузкой, необходим мотор с датчиками положения ротора. В том и в другом варианте есть свои плюсы и минусы.
Решение с датчиком оборачивается более удобным управлением, но при выходе из строя хотя бы одного из датчиков, мотор придется разбирать, к тому же датчики требуют отдельных проводов. В варианте без датчика нет надобности в специальных проводах, но во время старта ротор будет раскачиваться туда-сюда. Если это недопустимо, необходимо ставить в систему датчики.
Ротор и статор, количество фаз
Ротор BLDC двигателя может быть наружным или внутренним, а статор, соответственно, внутренним или наружным. Статор изготавливают из магнитопроводящего материала, с количеством зубцов, которое нацело делится на количество фаз. Ротор может быть изготовлен необязательно из магнитопроводящего материала, но обязательно с жестко зафиксированными на нем магнитами.

Чем сильнее магниты — тем выше доступный вращающий момент. Количество зубцов статора не обязательно должно быть равно количеству магнитов на роторе. Минимальное количество зубцов равно количеству фаз управления.
Большинство современных бесколлекторных двигателей постоянного тока — трехфазные, просто в силу простоты такой конструкции и способа управления ею. Как и в асинхронных двигателях переменного тока, обмотки трех фаз соединяются здесь на статор «треугольником» либо «звездой».
Такие двигатели без датчиков положения ротора имеют 3 питающих провода, а двигатели с датчиками — 8 проводов: дополнительные два провода — для питания датчиков и три — сигнальные выводы датчиков.
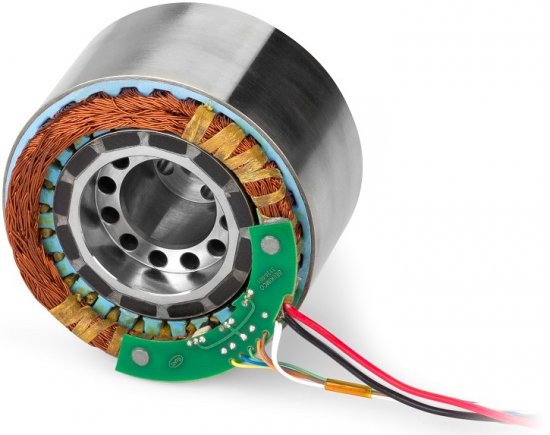 Обмотка статора выполняется изолированным медным проводом так, чтобы сформировать магнитные полюса необходимого количества фаз, равномерно распределенные по окружности ротора. Количество отдельно стоящих полюсов на статоре для каждой фазы выбирается исходя из требуемой скорости вращения двигателя (и вращающего момента).
Обмотка статора выполняется изолированным медным проводом так, чтобы сформировать магнитные полюса необходимого количества фаз, равномерно распределенные по окружности ротора. Количество отдельно стоящих полюсов на статоре для каждой фазы выбирается исходя из требуемой скорости вращения двигателя (и вращающего момента).
Низкооборотные двигатели с наружным ротором делают с большим количеством полюсов (и соответственно зубцов) на каждую фазу, чтобы получить вращение с угловой частотой значительно меньше частоты управляющего тока. Но даже в высокооборотных трехфазных моторах обычно не применяют количество зубцов меньше 9.
Бесколлекторный двигатель постоянного тока: особенности и принцип работы
Как работает бесколлекторный двигатель?
Бесколлекторный двигатель постоянного тока имеет на статоре трёхфазную обмотку, и постоянный магнит на роторе. Вращающееся магнитное поле создаётся обмоткой статора, при взаимодействии с которым магнитный ротор приходит в движение. Для создания вращающегося магнитного поля на обмотку статора подаётся система трёхфазных напряжений, которая может иметь различную форму и формируется различными способами. Формирование питающих напряжений (коммутация обмоток) для бесколлекторного двигателя постоянного тока производиться специализированными блоками электроники – контроллером двигателя.
В простейшем случае обмотки попарно подключаются к источнику постоянного напряжения и по мере того как ротор поворачивается в направлении вектора магнитного поля обмотки статора производится подключение напряжения к другой паре обмоток. Вектор магнитного поля статора при этом занимает другое положение и вращение ротора продолжается. Для определения нужного момента подключения следующих обмоток используется датчик положения ротора, чаще других используются датчики Холла.
Возможные варианты и специальные случаи
Выпускаемые сейчас бесколлекторные двигатели могут иметь самую разную конструкцию.
По исполнению статорной обмотки можно выделить двигатели с классической обмоткой, намотанной на стальной сердечник, и двигатели с полой цилиндрической обмоткой без стального сердечника. Классическая обмотка обладает значительно большей индуктивностью, чем полая цилиндрическая обмотка, и соответственно большей постоянной времени. Из-за этого с одной стороны, полая цилиндрическая обмотка допускает более динамичное изменение тока (а, следовательно, и момента), с другой стороны при работе от контроллера двигателя, использующего ШИМ-модуляцию невысокой частоты для сглаживания пульсаций тока, требуются фильтрующие дроссели большего номинала (а соответственно и большего размера). Кроме того, классическая обмотка, как правило, имеет заметно больший момент магнитной фиксации, а также меньший КПД, чем полая цилиндрическая обмотка.

Ещё одно отличие, по которому разделяются различные модели двигателей – это взаимное расположение ротора и статора – существуют двигатели с внутренним ротором и двигатели с внешним ротором. Двигатели с внутренним ротором, как правило, имеют более высокие скорости и меньший момент инерции ротора, чем модели с внешним ротором. Благодаря этому двигатели с внутренним ротором имеют более высокую динамику. Двигатели с внешним ротором часто имеют несколько больший номинальный момент при том же наружном диаметре двигателя.
Отличия от других типов двигателей
Отличия от коллекторных ДПТ. Размещение обмотки на роторе позволило отказаться от щёток и коллектора и избавиться тем самым от подвижного электрического контакта, который значительно снижает надёжность ДПТ с постоянными магнитами. По этой же причине скорость у бесколлекторных двигателей, как правило, значительно выше, чем у ДПТ с постоянными магнитами. С одной стороны это позволяет увеличить удельную мощность бесколлекторного двигателя, с другой стороны не для всех применений такая высокая скорость является действительно необходимой
Отличия от синхронных двигателей с постоянными магнитами. Синхронные двигатели с постоянными магнитами на роторе очень похожи на бесколлекторные ДПТ по конструкции, однако есть и ряд различий. Во-первых термин синхронный двигатель объединяет в себе много различных видов двигателей, часть из которых предназначены для непосредственной работы от стандартной сети переменного тока, другая часть (например синхронные серводвигатели) может работать только от преобразователей частоты (контроллеров двигателей). Бесколлекторные двигатели, хотя и имеют на статоре трёхфазную обмотку, не допускают непосредственную работу от сетевого напряжения, и обязательно требуют наличия соответствующего контроллера. Кроме того синхронные двигатели предполагают питание напряжением синусоидальной формы в то время как бесколлекторные двигатели допускают питание переменным напряжением ступенчатой формы (блочная коммутация) и даже предполагают его использование в номинальных режимах работы.
Когда нужен бесколлекторный двигатель?
Ответ на этот вопрос достаточно прост – в тех случаях, когда он имеет преимущество перед остальными типами двигателей. Так, например, практически невозможно обойтись без бесколлекторного двигателя в применениях, где требуются большие скорости вращения: свыше 10000 об/мин. Оправдано применение бесколлекторных двигателей также и в тех случаях, когда требуется высокий срок службы двигателя. В тех случаях, когда требуется применять сборку из двигателя с редуктором, однозначно оправдано применение низкоскоростных бесколлекторных двигателей (с большим числом полюсов). Высокоскоростные бесколлекторные двигатели в этом случае будут иметь скорость выше, чем предельно допустимая скорость редуктора, и по этой причине не будет возможности использовать их мощность полностью. Для применений, где требуется максимально простое управление двигателем (без использования контроллера двигателя) естественным выбором будет коллекторный ДПТ.
С другой стороны, в условиях повышенной температуры или повышенной радиации проявляется слабое место бесколлекторных двигателей – датчики Холла. Стандартные модели датчиков Холла имеют ограниченную стойкость к радиации и диапазон рабочих температур. Если в подобном применении всё же имеется необходимость использовать бесколлекторный двигатель, то неизбежными становятся заказные исполнения с заменой датчиков Холла на более стойкие к указанным факторам, что увеличивает цену двигателя и сроки поставки.
Обзор бесколлекторных двигателей: все, что нужно знать
Возникновение бесколлекторных двигателей объясняется необходимостью создания электрической машины с множеством преимуществ. Бесколлекторный двигатель представляет собой устройство без коллектора, функцию которого берет на себя электроника.
БКЭПТ — бесколлекторные электродвигатели постоянного тока, могут быть мощностью, примером, 12, 30 вольт.
Выбор подходящего двигателя
Чтобы подобрать агрегат, необходимо сравнить принцип работы и особенности коллекторных и бесколлекторных двигателей.

Слева направо: коллекторный двигатель и двигатель ФК 28-12 бесколлекторный
Коллекторные стоят меньше, но развивают невысокую скорость вращения крутящего момента. Они работают от постоянного тока, имеет небольшой вес и размер, доступный ремонт по замене деталей. Проявление негативного качества выявляется при получении огромного количества оборотов. Щетки контактируют с коллектором, вызывая трение, что может повредить механизм. Работоспособность агрегата снижается.
Щеточки не только требуют ремонта из-за быстрого износа, но и могут привести к перегреву механизма.
Главным преимуществом бесколлекторного двигателя постоянного тока является неимение контактов крутящего момента и переключения. Значит отсутствие источников потерь, как в двигателях с постоянными магнитами. Их функции выполняют транзисторы МОП. Ранее их стоимость была высокой, поэтому они не были доступны. Сегодня цена стала приемлемой, а показатели значительно улучшились. При отсутствии в системе радиатора, мощность ограничивается от 2,5 до 4 ватт, а ток работы от 10 до 30 Ампер. КПД бесколлекторных электродвигателей очень высокий.
Вторым преимуществом выступает настройки механики. Ось устанавливается на широкоподшипники. В структуре нет ломающих и стирающихся элементов.
Единственным минусом является дорогой электронный блок управления.

Шпиндель ЧПУ Porter Cable 690
Рассмотрим, пример механики ЧПУ станка со шпинделем.
Замена коллекторного двигателя на бесколлекторный оградит от поломки шпинделя для ЧПУ. Под шпинделем имеется в видувал, обладающий правыми и левыми оборотами крутящего момента. Шпиндель для ЧПУ обладает большой мощностью. Скорость крутящего момента контролируется регулятором сервотестором, а обороты управляются автоматом контроллером. Стоимость ЧПУ со шпинделем около 4 тысяч рублей.
Принцип работы
Главная особенность механизма — отсутствие коллектора. А постоянные магниты установлены у шпинделя, является ротором. Вокруг него располагаются проволочные обмотки, которые имеют различные магнитные поля. Отличием бесколлекторных моторов 12 вольт является сенсор управления ротором, расположенный на нем же. Сигналы подаются в блок регулятора скорости.
Устройство БКЭПТ
Схему расположения магнитов внутри статора обычно применяют для двухфазных двигателей с небольшим количеством полюсов. Принцип крутящего момента вокруг статора применяют при необходимости получить двухфазный двигатель с небольшими оборотами.
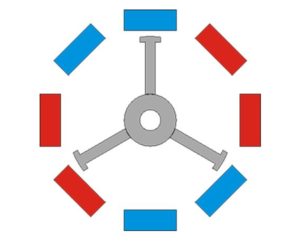
На картинке изображено 8 магнитов, формирующих 4 полюса. Момент силы зависит от мощности магнитов.
Датчики и их отсутствие
Регуляторы хода подразделяются на две группы: с датчиком положения ротора и без.
Токовые силы подаются на обмотки двигателя при особом положении ротора.Его определяет электронная система с помощью датчика положения. Они бывают разнообразных типов. Популярный регулятор хода — дискретный датчик с эффектом Холла. В двигателе на три фазы на 30 вольт будет использовано 3 датчика. Блок электроники постоянно располагает данными о положении ротора и направляет напряжение вовремя в нужные обмотки.
Датчик Холла
 Распространенное приспособление, изменяющие свои выводы при переключении обмоток.
Распространенное приспособление, изменяющие свои выводы при переключении обмоток.
Устройство с разомкнутым контуром измеряет ток, частоту вращения. ШИМ каналы присоединяются к нижней части системы управления.
Три ввода присоединяются к датчику Холла. В случае изменения датчика Холла, начинается процесс переработки прерывания. Для обеспечения быстрого реагирования обработки прерывания подключается датчик Холла к младшим выводам порта.
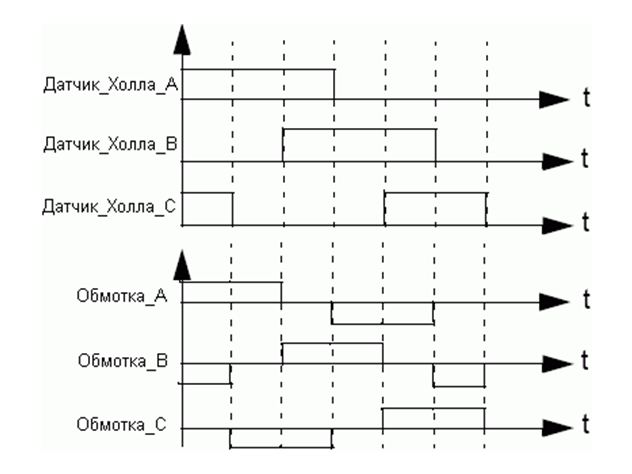
Сигналы датчика холла в момент вращения
Использование датчика положения с микроконтроллером

Микроконтроллеры AVR фирмы Atmel
Контроллер силы каскада лежит в основе AVR ядра, который обеспечивает грамотное управление бесколлекторным двигателем постоянного тока. AVR представляет собой чип для выполнения определенных задач.
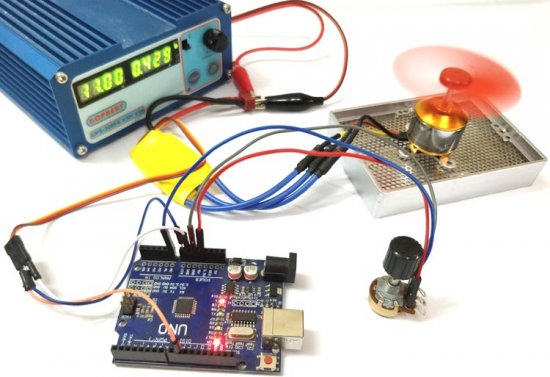
Принцип работы регулятора хода может быть с датчиком и без. Программа платы AVR осуществляет:
- пуск двигателя максимально быстро без использования внешних дополнительных приборов,
- управление скоростью одним внешним потенциометром.

Электронный блок управления СМА LG 6871ER1007C
Отдельный вид автоматического управления сма, используется в стиральных машинах.
Отсутствие датчика
 Для определения положения ротора необходимо проводить измерение напряжения на незадействованную обмотку. Данный способ применим при вращении двигателя, иначе он не будет действовать.
Для определения положения ротора необходимо проводить измерение напряжения на незадействованную обмотку. Данный способ применим при вращении двигателя, иначе он не будет действовать.
Бездатчиковые регуляторы хода изготавливаются легче, это объясняет их широкое распространение.
Контроллеры обладают следующими свойствами:
- значение максимального постоянного тока,
- значение максимального рабочего напряжения,
- число максимальных оборотов,
- сопротивление силовых ключей,
- импульсная частота.
При подключении контроллера важно делать провода, как можно короче. Из-за возникновения бросков тока на старте. Если провод длинный, то могут возникнуть погрешности определения положения ротора. Поэтому контроллеры продаются с проводом 12 — 16 см.
Контроллеры обладают множеством программных настроек:
- контроль выключения двигателя,
- плавное или жёсткое выключение,
- торможение и плавное выключение,
- опережение мощности и КПД,
- мягкий, жесткий, быстрый старт,
- ограничения тока,
- режим газа,
- смена направления.

Контроллер LB11880, изображенный на рисунке, содержит драйвер бесколлекторного двигателя мощной нагрузки, то есть можно запустить двигатель напрямую к микросхеме без дополнительных драйверов.
Понятие ШИМ частоты
Когда происходит включение ключей, полная нагрузка подаётся на двигатель. Агрегат достигает максимальных оборотов. Для того чтобы управлять двигателем, нужно обеспечить регулятор питания. Именно это осуществляет широтно-импульсная модуляция (ШИМ).
Устанавливается необходимая частота открытия и закрытия ключей. Напряжение меняется с нулевого на рабочее. Чтобы управлять оборотами, необходимо наложить сигнал ШИМ на сигналы ключей.
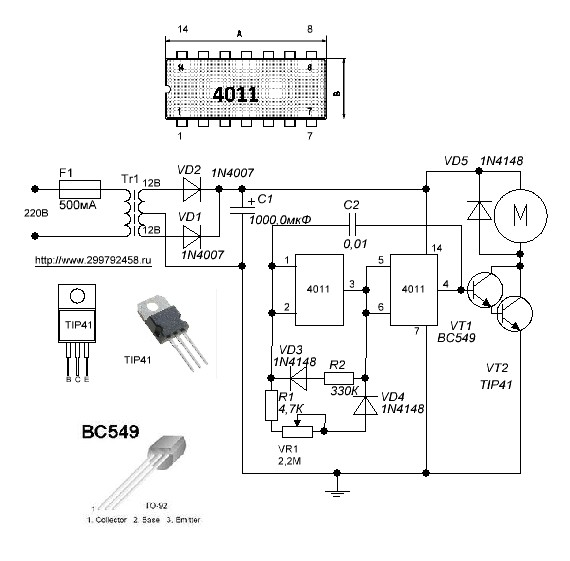
Схема регулятора оборотов двигателя постоянного тока на напряжение 12 вольт
Сигнал ШИМ может быть сформирован аппаратом на несколько выводов. Или создать ШИМ для отдельного ключа программой. Схема становится проще. ШИМ сигнал имеет 4— 80 килогерц.
Увеличение частоты приводит к большему количеству процессов перехода, что даёт выделение тепла. Высота частоты ШИМ повышает количество переходных процессов, от этого происходят потери на ключах. Маленькая частота не даёт нужную плавность управления.
Чтобы уменьшить потери на ключах при переходных процессах, ШИМ сигналы подаются на верхние или на нижние ключи по отдельности. Прямые потери рассчитываются по формуле P=R*I2, где P — мощность потерь, R — сопротивление ключа, I — сила тока.
Меньшее сопротивление минимизируют потери, увеличивает КПД.
Система arduino
Часто для управления бесколлекторными двигателями используется аппаратная вычислительная платформа arduino. В основе находится плата и среда разработки на языке Wiring.
В Плату arduino входит микроконтроллер Atmel AVR и элементная обвязка программирования и взаимодействия со схемами. На плате имеется стабилизатор напряжения. Плата Serial Arduino представляет собой несложную инвертирующую схему для конвертирования сигналов с одного уровня на другой. Программы устанавливаются через USB. В некоторых моделях, например, Arduino Mini, необходима дополнительная плата для программирования.
Язык программирования Arduino используется стандартный Processing. Некоторые модели arduino позволяют управлять несколькими серверами одновременно. Программы обрабатывает процессор, а компилирует AVR.
Проблемы с контроллером могут возникать из-за провалов напряжения и чрезмерной нагрузке.
Крепеж двигателя

Моторама— механизм крепления двигателя. Применяется в установках двигателей. Моторама представляет собой взаимосвязанные стержни и элементы каркаса. Моторамы бывают плоскими, пространственными по элементам. Моторама одиночного двигателя 30 вольт или нескольких устройств. Силовая схема моторамы состоит из совокупности стержней. Моторама устанавливается в сочетании ферменных и каркасных элементов.
Бесколлекторный электродвигатель постоянного тока незаменимый агрегат, применяемый как в быту, так и в промышленности. Например, ЧПУ станок, медицинское оборудование, автомобильные механизмы.
БКЭПТ выделяются надежностью, высокоточным принципом работы, автоматическим интеллектуальным управлением и регулированием.







