- Cпособы регулирования скорости вращения асинхронного двигателя
- Частотное регулирование
- Схемы регуляторов оборотов асинхронного двигателя
- Заключение
- Регулирование скорости асинхронного двигателя
- Управление скоростью вращения однофазных двигателей
- Регулирование напряжением
- Автотрансформаторное регулирование напряжения
- Тиристорный регулятор оборотов двигателя
- Транзисторный регулятор напряжения
- Частотное регулирование
- Преобразователи для однофазных двигателей
- Использование ЧП для трёхфазных двигателей
Cпособы регулирования скорости вращения асинхронного двигателя

Асинхронные двигатели переменного тока являются самыми применяемыми электродвигателями абсолютно во всех хозяйственных сферах. В их преимуществах отмечается конструктивная простота и небольшая цена. При этом немаловажное значение имеет регулирование скорости асинхронного двигателя. Существующие способы показаны ниже.
Согласно структурной схеме скоростью электродвигателя можно управлять в двух направлениях, то есть изменением величин:
- скорость электромагнитного поля статора;
- скольжение двигателя.
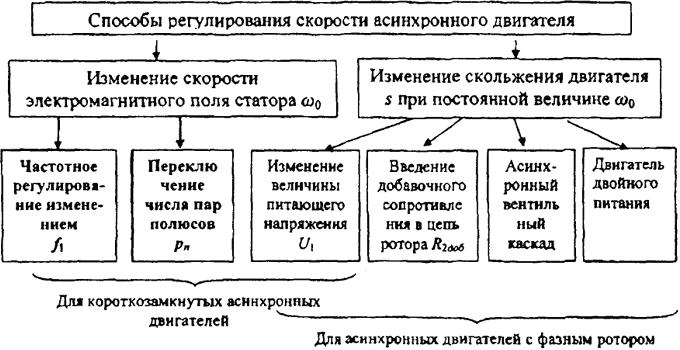
Первый вариант коррекции, используемый для моделей с короткозамкнутым ротором, осуществляется за счет изменения:
- частоты,
- количества полюсных пар,
- напряжения.
В основе второго варианта, применяемого для модификации с фазным ротором, лежат:
- изменение напряжения питания;
- присоединение элемента сопротивления в цепь ротора;
- использование вентильного каскада;
- применение двойного питания.
Вследствие развития силовой преобразовательной техники на текущий момент в широком масштабе изготовляются всевозможные виды частотников, что определило активное применение частотно-регулируемого привода. Рассмотрим наиболее распространённые методы.
Частотное регулирование
Всего десять лет назад в торговой сети регуляторов частоты вращения скорости ЭД было небольшое количество. Причиной тому служило то, что тогда ещё не производились дешёвые силовые высоковольтные транзисторы и модули.
На сегодня частотное преобразование – самый распространённый способ регулирования скорости двигателей. Трёхфазные преобразователи частоты создаются для управления 3-фазными электродвигателями.
Однофазные же двигатели управляются:
- специальными однофазными преобразователями частоты;
- 3-фазными преобразователями частоты с устранением конденсатора.
Схемы регуляторов оборотов асинхронного двигателя
Для двигателей повседневного предназначения легко можно выполнить необходимые расчеты, и своими руками произвести сборку устройства на полупроводниковой микросхеме. Пример схемы регулятора электродвигателя приведён ниже. Такая схема позволяет добиться контроля параметров приводной системы, затрат на техническое обслуживание, снижения потребления электричества наполовину.
Принципиальная схема регулятора оборотов вращения ЭД для повседневных нужд значительно упрощается, если применить так называемый симистор.
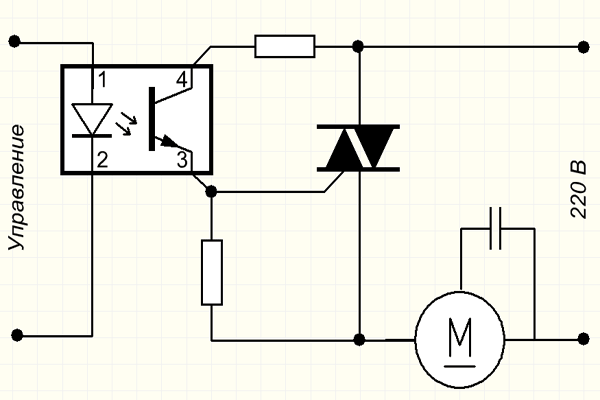
Обороты вращения ЭД регулируются с помощью потенциометра, определяющего фазу входного импульсного сигнала, открывающего симистор. На изображении видно, что в качестве ключей применяются два тиристора, подключённых встречно-параллельно. Тиристорный регулятор оборотов ЭД 220 В достаточно часто применяется для регулирования такой нагрузки, как диммеры, вентиляторы и нагревательная техника. От оборотов вращения асинхронного ЭД зависят технические показатели и эффективность работы двигательного оборудования.
Заключение
На технорынке сегодня предлагаются в большом ассортименте регуляторы и частотные преобразователи для асинхронных электродвигателей переменного тока.
Управление способом варьирования частоты на данный момент – самый оптимальный способ, т. к. он позволяет плавно регулировать скорость асинхронного ЭД в широчайшем диапазоне, без значительных потерь и снижения перегрузочных способностей.
Тем не менее, на основе расчёта, можно самостоятельно собрать простое и эффективное устройство с регулированием оборотов вращения однофазных электродвигателей с помощью тиристоров.
Регулирование скорости асинхронного двигателя
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.

Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 — s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 — 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
 Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя , позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения .
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.

Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора

Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре

Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.

Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения — асинхронный двигатель (ТРН — АД)
Замкнутая схема управления асинхронным двигателем , выполненным по схеме тиристорный регулятор напряжения — электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
 Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
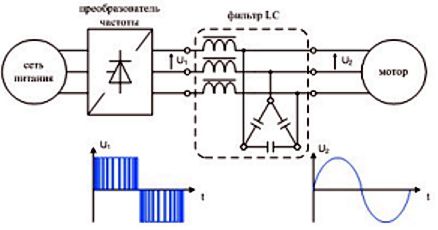
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.

Рис. 5. Схема частотного электропривода

Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 — 30) : 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
 Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты I вых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения n о = 60 f /р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n о магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.

Рис. 7. Схемы переключения обмоток асинхронного двигателя: а — с одинарной звезды на двойную; б — с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Управление скоростью вращения однофазных двигателей

Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.


Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2 — скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
![]()
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
 Преимущества данной схемы:
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
 Недостатки:
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
![]()
![]()
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.

Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.

Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением


Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
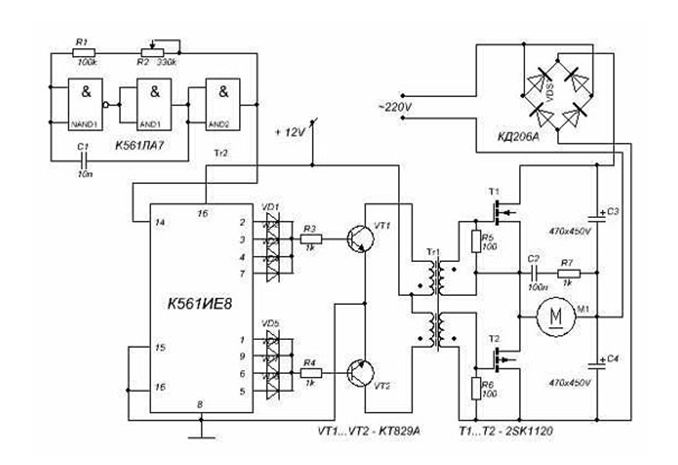
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
![]()
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
![]()
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.

Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2

Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:

Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
Использование ЧП для трёхфазных двигателей

Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:

Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:

Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями







