Электрические машины переменного тока
Электрические машины служат для превращения механической энергии в электрическую (генераторы переменного и постоянного тока) и для обратного превращения (электродвигатели).
Во всех указанных случаях используются в сущности три основных открытия в области электромагнетизма: явление механического взаимодействия токов, открытое Ампером в 1821 г., явление электромагнитной индукции, открытое Фарадеем в 1831 г., и теоретическое обобщение этих явлений, сделанное Ленцем (1834 г.) в его известном законе о направлении индукционного тока (по существу закон Ленца предвосхитил закон сохранения энергии для электромагнитных процессов).

Для преобразования механической энергии в электрическую или обратно необходимо создать относительное движение проводящего контура с током и магнитного поля (магнита или тока).
В электрических машинах, рассчитанных на длительную работу, используется вращательное движение подвижной части машины (ротор машины переменного тока), расположенной внутри неподвижной части (статора). Обмотка машины, служащая для создания магнитного поля, называется индуктором, а обмотка, обтекаемая рабочим током, называется якорем. Оба последних термина употребляются и для машин постоянного тока.
Для увеличения магнитной индукции обмотки машин размещаются на ферромагнитных телах (сталь, чугун).
Все электрические машины обладают свойством обратимости, т. е. могут использоваться как в качестве генераторов электрической энергии, так и в качестве электродвигателей.

В асинхронных двигателях используется одно из проявлений электромагнитной индукции. В курсах физики оно демонстрируется следующим образом:
Под медным диском, способным вращаться вокруг вертикальной оси, проходящей через его центр, помещается вертикальный подковообразный магнит, приводимый во вращение вокруг той же оси (механическое взаимодействие диска и магнита исключено). При этом диск приходит во вращение в ту же сторону, что и магнит, но с меньшей скоростью. Если увеличить механическую нагрузку на диск (например, увеличив трение оси о подпятник), то скорость его вращения уменьшается.
Физический смысл этого явления легко объясняется теорией электромагнитной индукции: при вращении магнита создается вращающееся магнитное поле, наводящее в диске вихревые токи величина последних зависит при прочих равных условиях от относительной скорости поля и диска.
Согласно закону Ленца диск должен прийти во вращение в направлении поля. При отсутствии трения диск должен приобрести угловую скорость, равную скорости магнита, тогда ЭДС индукции исчезнет. В реальных условиях трение неизбежно присутствует, и диск приобретает меньшую скорость. Ее величина зависит от механического тормозящего момента, испытываемого диском.
Несовпадение скорости вращения диска (ротора) со скоростью вращения магнитного поля отражено в названии двигателей.
Принцип действия асинхронных двигателей:
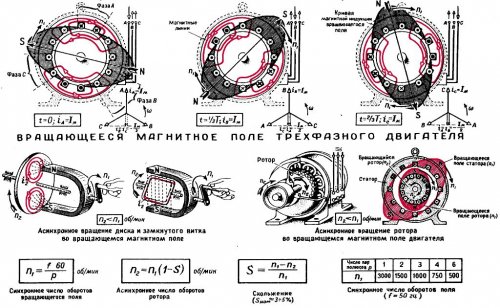
В технических асинхронных двигателях (чаще всего трехфазных) вращающееся магнитное поле создается многофазным током, обтекающим обмотку неподвижного статора. При частоте трехфазного тока f и числе катушек статора 3 р вращающееся поле делает n = f/p об/сек.

В полости статора располагается способный вращаться ротор. С его валом можно соединить механизм, приводимый во вращение. В простейших «короткозамкнутых» двигателях ротор состоит из системы продольных металлических стержней, помещаемых в пазы стального цилиндрического тела. Провода соединены накоротко двумя кольцами. Для увеличения вращательного момента радиус ротора делается достаточно большим.

В других конструкциях двигателей (обычно — это двигатели большой мощности) проводники ротора образуют разомкнутую трехфазную обмотку. Концы катушек замкнуты накоротко в самом роторе, а начала выведены к трем контактным кольцам, насаженным на вал ротора и изолированным от него.
К этим кольцам при помощи скользящих контактов (щеток) присоединен трехфазный реостат, который служит для пуска двигателя в ход. После того как двигатель раскрутится, реостат полностью выводят, и ротор превращается в короткозамкнутый (смотрите — Асинхронные двигатели с фазным ротором).

На теле статора имеется доска для зажимов. К ним выводятся обмотки статора. Они могут быть включены звездой, либо треугольником, в зависимости от напряжения сети: в первом случае линейное напряжение может быть в 1,73 раз больше, чем во втором.
Величина характеризующая относительное запаздывание ротора по сравнению с полем статора у асинхронного двигателя, называется скольжением. Она изменяется от 100% (в момент пуска двигателя) до нуля (идеальный случай движения ротора без потерь).
Перемена направления вращения асинхронного двигателя достигается взаимным переключением каких-либо двух линейных проводов электрической сети, питающей двигатель.

Короткозамкнутые двигатели широко применяются в промышленности. Достоинствами асинхронных двигателей являются простота конструкции и отсутствие скользящих контактов.
Основным недостатком таких двигателей до последнего времени считалась трудность регулировки числа оборотов, т.к. если для этого изменять напряжение цепи статора, то резко меняется вращающий момент, изменять же частоту питающего тока было технически затруднительно. В настоящее время для регулирования частоты питающего тока для изменения частоты вращения двигатели нашли широкое распространение современные микропроцессорные устройства — частотные преобразователи.
Генераторы переменного тока
Генераторы переменного тока строятся на значительные мощности и высокие напряжения. Как и асинхронные машины, они имеют две обмотки. Обычно обмотка якоря располагается в теле статора. Индукторы, создающие первичный магнитный поток, монтируются на роторе и питаются от возбудителя — небольшого генератора постоянного тока, смонтированного на валу ротора. В мощных машинах возбуждение иногда создается выпрямленным переменным напряжением.
Благодаря неподвижности обмотки якоря отпадают технические затруднения, связанные с использованием скользящих контактов при больших мощностях.
На рисунке ниже схематически изображен однофазный генератор. Его ротор имеет восемь полюсов. На них намотаны катушки (не показанные на рисунке), питаемые от постороннего источника постоянным током, подводимым к контактным кольцам, укрепленным на валу ротора. Полюсные катушки намотаны таким образом, что знаки полюсов, обращенных к статору, чередуются. Число полюсов обязательно четное.
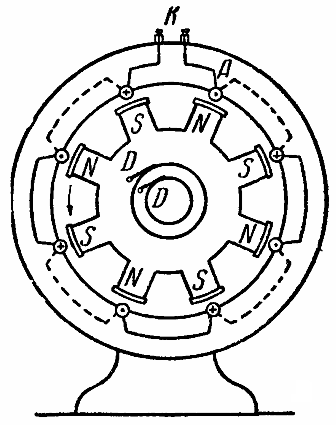
В теле статора размещена обмотка якоря. Ее длинные рабочие «активные» проводники, перпендикулярные к плоскости чертежа, показаны на рисунке кружками, они пересекаются линиями магнитной индукции при вращении ротора.
В кружках указано мгновенное распределение направлений индуцированных электрических полей. Соединительные провода, идущие по передней стороне статора, показаны сплошными линиями, а по задней стороне — пунктиром. Зажимы К служат для присоединения внешней цепи к обмотке статора. Направление вращения ротора указано стрелкой.
Если мысленно разрезать машину по радиусу, проходящему между зажимами К, и развернуть на плоскость, то взаимное расположение обмотки статора и полюсов ротора (сбоку и в плане) изобразится схематическим рисунком:
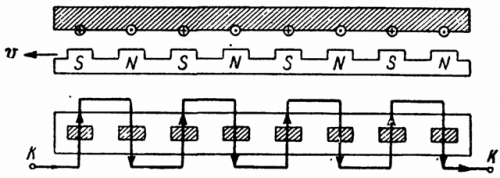
Рассматривая рисунок, убеждаемся, что все активные проводники (проходящие над полюсами индуктора) соединены друг с другом последовательно, причем индуцируемые в них ЭДС суммируются. Фазы всех ЭДС, очевидно, получаются одинаковыми. За время одного полного оборота ротора в каждом из проводников (и, следовательно, во внешней цепи) получится четыре полных периода изменения тока.
Если электрическая машина имеет p пар полюсов и ротор вращается, совершая n оборотов в секунду, то частота получаемого от машины переменного тока равна f = pn гц.
Так как частота ЭДС в сети должна быть неизменна, то скорость вращения роторов должна быть постоянна. Для получения ЭДС технической частоты (50 гц) можно использовать сравнительно медленное вращение, если число полюсов ротора достаточно велико.
Для получения трехфазного тока в теле статора располагают три отдельные обмотки. Каждая из них смещена относительно двух других на одну треть дугового расстояния между соседними (разноименными) полюсами индукторов.
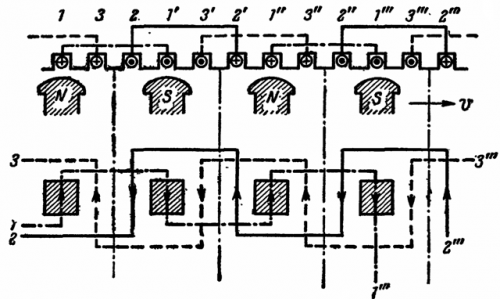
Легко убедиться, что при вращении индукторов в обмотках индуцируются ЭДС, сдвинутые по фазе (во времени) на 120°. Концы обмоток выводятся из машины и могут соединяться звездой или треугольником.
В генераторе относительная скорость поля и провода определяется диаметром ротора, числом оборотов ротора в секунду и числом пар полюсов.

Если генератор приводится во вращение током воды (гидрогенератор), то обычно он делается тихоходным. Для получения нужной частоты тока приходится увеличивать число полюсов, что в свою очередь требует увеличения диаметра ротора.
По ряду технических соображений мощные гидрогенераторы имеют обычно вертикальный вал и располагаются над гидротурбиной, приводящей их во вращение.

Генераторы, движимые паровыми турбинами — турбогенераторы, обычно быстроходны. Для уменьшения механических усилий они имеют малые диаметры и соответственно небольшое число полюсов. Ряд технических соображений заставляет делать турбогенераторы с горизонтальным валом.
Если генератор приводится во вращение двигателем внутреннего сгорания, то его называют дизель-генератором, так как в качестве двигателей обычно применяют дизели, потребляющие более дешевое топливо.

Обратимость генераторов, синхронные двигатели
Если к обмотке статора генератора приключить переменное напряжение от внешнего источника, то возникнет взаимодействие полюсов индуктора с магнитным полем тока, создавшегося в статоре, причем на все полюсы будут действовать вращающие моменты одного и того же направления.
Если ротор вращается с такой скоростью, что как раз через половину периода переменного тока под рассматриваемый проводник обмотки статора подойдет следующий полюс индуктора (противоположный по знаку первому полюсу), то знак силы взаимодействия между ним и током, изменившим свое направление, останется прежним.
При этих условиях ротор, находясь под непрерывным воздействием вращающего момента, будет продолжать свое движение и сможет приводить в действие какой-либо механизм. Преодоление сопротивлений движению ротора будет происходить за счет энергии, потребляемой из сети, и генератор превратится в электродвигатель.

Следует отметить, однако, что непрерывное движение возможно лишь при строго определенной скорости вращения, так как при отклонении от нее на каждый из полюсов ротора, перемещающийся между двумя проводниками статора, часть времени будет действовать ускоряющий вращающий момент, часть же времени — тормозящий.
Таким образом, скорость вращения двигателя должна быть строго определенной,— время, в течение которого полюс заменяется следующим, должно совпадать с полупериодом тока, поэтому подобные двигатели и называются синхронными.
Если переменное напряжение подается в обмотку статора при неподвижном роторе, то, хотя все полюсы ротора в течение первого полупериода тока и испытывают действие вращающих моментов одного и тою же знака, все же вследствие инерции ротор не успеет сдвинуться с места. В следующий полупериод знак вращающих моментов для всех полюсов ротора изменится на обратный.
В результате ротор будет вибрировать, но вращаться не сможет. Поэтому синхронный двигатель необходимо сначала раскрутить, т. е. довести до нормального числа оборотов, и лишь после этого включать ток в обмотку статора.
Раскручивание синхронных двигателей производится механическими способами (при малых мощностях) и специальными электрическими устройствами (при больших мощностях). 
При небольших изменениях нагрузки режим двигателя автоматически изменяется, приспосабливаясь к новой нагрузке. Так, при увеличении нагрузки на вал двигателя ротор мгновенно затормаживается. Благодаря этому меняется фазовый сдвиг между напряжением сети и противодействующей ЭДС индукции, наводимой индуктором в обмотке статора.
Кроме того, реакция якоря создает размагничивание индукторов, поэтому ток в статоре растет, индукторы испытывают увеличенный вращающий момент и двигатель, вновь начинает вращаться синхронно, преодолевая увеличенную нагрузку. Аналогичный процесс происходит при уменьшении нагрузки.
При резких колебаниях нагрузки эта приспособляемость двигателя может оказаться недостаточной, скорость его изменится значительно, он «выпадет из синхронизма» и в конце концов остановится, при этом исчезает ЭДС индукции, наводившаяся в статоре, и ток в нем резко увеличивается. Поэтому следует избегать резких колебаний нагрузки. Для остановки двигателя, очевидно, нужно сначала выключить цепь статора, а потом уже выключать индукторы, при пуске двигателя следует придерживаться обратного порядка операций.
Синхронные двигатели наиболее часто применяются для привода механизмов, которые работают с постоянной скоростью. Достоинства и недостатки синхронных двигателей, а также способы их пуска рассмотрены здесь: Синхронные двигатели и их применение
Электрические машины переменного тока




![]()
![]()
Машины переменного тока подразделяются на синхронные и асинхронные. Группа асинхронных машин представлена на практике главным образом трехфазными асинхронными двигателями, самыми распространенными из всех типов двигателей. В силу обратимости трехфазная асинхронная машина может работать и в режиме генератора, что имеет место в тормозных режимах. Однако, использование асинхронных машин в качестве генераторов в связи с осложнениями, возникающими при их работе в этом режиме и несомненными преимуществами синхронных генераторов, не применяется. Однофазные асинхронные двигатели получили свое распространение только в виде двигателей малой мощности. Синхронные машины переменного тока получили наибольшее распространение как трехфазные генераторы, в основном это все генераторы на современных электрических станциях. Трехфазные синхронные двигатели получили преимущественно применение в качестве привода мощных производственных машин.
Асинхронная машина — такая машина, в которой преобразование энергии осуществляется посредством вращающегося магнитного поля, возбуждаемого переменным током частотой  , поступающим из сети. Основным принципом работы является то, что ротор вращается со скоростью n2 отличающееся от скорости вращения магнитного поля n1, называемой синхронной скоростью двигателя. В большинстве асинхронных двигателей магнитное поле создается системой трехфазного тока. При работе в качестве двигателя ротор вращается медленнее, чем магнитное поле. Если ротор с помощью первичного двигателя вращается быстрее, чем магнитное поле, то машина является генератором. Как в режиме двигателя, так и режиме генератора скорость вращения ротора асинхронной машины зависит от нагрузки.
, поступающим из сети. Основным принципом работы является то, что ротор вращается со скоростью n2 отличающееся от скорости вращения магнитного поля n1, называемой синхронной скоростью двигателя. В большинстве асинхронных двигателей магнитное поле создается системой трехфазного тока. При работе в качестве двигателя ротор вращается медленнее, чем магнитное поле. Если ротор с помощью первичного двигателя вращается быстрее, чем магнитное поле, то машина является генератором. Как в режиме двигателя, так и режиме генератора скорость вращения ротора асинхронной машины зависит от нагрузки.
Неподвижная часть машины — статор, состоит из стального сердечника и расположенных на нем трех обмоток, оси которых сдвинуты на угол 120 0 одна относительно другой, подключенные к источнику трехфазного тока. Сердечник статора имеет форму полого цилиндра, вдоль образующих внутренней поверхности которого, сделаны пазы. В диаметрально противоположных пазах статора уложены стороны трех катушек обмотки. В полости статора расположен ротор, представляющий собой цилиндрический сердечник, в диаметрально противоположных пазах которого, уложены короткозамкнутые витки. Если катушки статора соединить между собой в звезду или треугольник, то симметричная трехфазная цепь питания создает в магнитной системе машины вращающееся магнитное поле.
При вращении магнитного поля токов статора со скоростью n1, в проводниках ротора наводится ЭДС. Под действием ЭДС в короткозамкнутых витках ротора возникнут токи, взаимодействующие с вращающимся магнитным полем. Это взаимодействие проявится в возникновении электромагнитных сил, действующих на ротор. Если электромагнитные силы, действующие на неподвижный ротор, превышают тормозные усилия на его валу, то он получит ускоренное движение в направлении вращения магнитного поля. По мере возрастания скорости вращения ротора относительная скорость движения его проводников в равномерно вращающемся поле уменьшается, вследствие чего уменьшается и величина тока в них. Процесс изменения тока и скорости вращения ротора прекратиться, как только наступит устойчивое равновесие между моментом электромагнитных сил, вызывающих вращение ротора, и тормозным моментом, создаваемым устройством, приводимым в движение электрической машиной. В этих условиях ротор машины будет вращаться с постоянной скоростью и в его короткозамкнутых контурах установятся токи, обеспечивающие создание вращающего момента, равного тормозному. Таким образом, принцип работы асинхронных двигателей основан на взаимодействии вращающегося магнитного поля с токами, которые наводятся этим полем в проводниках ротора.
Одной из важнейших величин, характеризующих работу асинхронного двигателя, является скольжение ротора, под которым понимают отношение:


где  — частота вращения ротора;
— частота вращения ротора;
 — частота вращения магнитного поля;
— частота вращения магнитного поля;
 — число пар полюсов двигателя.
— число пар полюсов двигателя.
Для большинства современных типов асинхронных двигателей скольжение ротора при номинальной нагрузке заключено в пределах 2-6%.
При отсутствии нагрузки, когда двигатель работает вхолостую, и вращению ротора препятствуют лишь незначительные силы трения, скольжение очень мало и не превосходит десятых долей процента. С увеличением нагрузки скорость вращения ротора уменьшается, а скольжение и вращательный момент соответственно увеличиваются. Однако увеличивается ток в роторе и потери электрической энергии.
Электромагнитные процессы в асинхронном двигателе аналогичны процессам, происходящим в трансформаторе. Обмотку статора двигателя можно рассматривать как первичную обмотку трансформатора, а обмотку ротора — как вторичную. Особенностью двигателя по сравнению с трансформатором является то, что в его статорной и роторной обмотках действуют ЭДС и токи разных частот.
Величины этих ЭДС определяются по формулам:


где  — ЭДС обмотки статора,
— ЭДС обмотки статора,
 — ЭДС обмотки неподвижного ротора,
— ЭДС обмотки неподвижного ротора,
 и
и  — соответственно обмоточные коэффициенты обмоток статора и ротора,
— соответственно обмоточные коэффициенты обмоток статора и ротора,
 и
и  — число обмоток статора и ротора,
— число обмоток статора и ротора,
 — основной магнитный поток,
— основной магнитный поток,
— частота тока цепи,
 — частота ЭДС ротора. Из этого соотношения следует, что частота ЭДС ротора пропорциональна скольжению.
— частота ЭДС ротора. Из этого соотношения следует, что частота ЭДС ротора пропорциональна скольжению.
При неподвижном роторе  , т.е частота тока и ЭДС ротора равна частоте ЭДС и тока статора и равна частоте питающего напряжения. Векторная диаграмма в этом режиме, называемым холостым ходом, аналогична соответствующей векторной диаграмме трансформатора.
, т.е частота тока и ЭДС ротора равна частоте ЭДС и тока статора и равна частоте питающего напряжения. Векторная диаграмма в этом режиме, называемым холостым ходом, аналогична соответствующей векторной диаграмме трансформатора.
ЭДС во вращающемся роторе  .
.
Индуктивное сопротивление вращающегося ротора:
 .
.
Активное сопротивление ротора  не зависит от частоты.
не зависит от частоты.
По закону Ома ток в роторе равен:
 .
.
Электрическая мощность, подведенная к двигателю из сети  , преобразуется в нем в механическую. Преобразование энергии сопровождается потерями. Часть подводимой мощности тратится на потери в стали машины —
, преобразуется в нем в механическую. Преобразование энергии сопровождается потерями. Часть подводимой мощности тратится на потери в стали машины —  и на потери в меди статора, т.е. на нагрев обмотки статора
и на потери в меди статора, т.е. на нагрев обмотки статора  .Остальная мощность электромагнитным путем передается на ротор и называется электромагнитной мощностью
.Остальная мощность электромагнитным путем передается на ротор и называется электромагнитной мощностью  . Часть мощности. Переданной на ротор, тратится на нагрев меди обмоток ротора
. Часть мощности. Переданной на ротор, тратится на нагрев меди обмоток ротора  и зависит от скольжения
и зависит от скольжения  . Остальная часть мощности называется полной механической мощностью
. Остальная часть мощности называется полной механической мощностью  . Если из полной механической мощности вычесть механические потери и добавочные потери
. Если из полной механической мощности вычесть механические потери и добавочные потери  то получится полезная мощность на валу двигателя
то получится полезная мощность на валу двигателя  .
.
КПД асинхронного двигателя:
 , где
, где  .
.
Величина КПД асинхронных двигателей составляет от 0,7 до 0,9 и выше.
Механическая мощность ротора:
 ,
,
где  — вращающий момент двигателя.
— вращающий момент двигателя.
Электромагнитная мощность вращающегося магнитного поля:
 .
.
Основные режимы работы асинхронного двигателя это
1) пуск двигателя в ход,
2) холостой ход двигателя,
3) рабочий режим двигателя, в частности режим при полной номинальной нагрузке.
Рабочий режим двигателя при номинальной нагрузке характеризуется номинальными параметрами различными для каждого асинхронного двигателя. Основным номинальным параметром асинхронного двигателя является его номинальная мощность  . Это мощность выражается в киловаттах и соответствует той наибольшей механической мощности на валу двигателя, которая может быть полезно отдана механизму, приводимого двигателем во вращение. Работа двигателя с нагрузкой превышающей его номинальную мощность, рассматривается как перегрузка и потому длительно не допустима.
. Это мощность выражается в киловаттах и соответствует той наибольшей механической мощности на валу двигателя, которая может быть полезно отдана механизму, приводимого двигателем во вращение. Работа двигателя с нагрузкой превышающей его номинальную мощность, рассматривается как перегрузка и потому длительно не допустима.
Вторым параметром двигателя является его номинальная скорость вращения  .
.
Важным электрическим параметром является напряжение, для которого предназначен двигатель  . Номинальный ток двигателя устанавливается, исходя из номинальной мощности двигателя и номинального напряжения. К номинальным параметрам относят также номинальный коэффициент мощности двигателя.
. Номинальный ток двигателя устанавливается, исходя из номинальной мощности двигателя и номинального напряжения. К номинальным параметрам относят также номинальный коэффициент мощности двигателя.
Номинальный момент  часто вычисляют по упрощенной формуле, положив в нее номинальные значения величин:
часто вычисляют по упрощенной формуле, положив в нее номинальные значения величин:
 (кГм) или
(кГм) или  (Нм)
(Нм)
Для расчета зависимости вращающего момента асинхронного двигателя от скольжения с достаточной точностью применяется упрощенная формула:
где  — максимальный вращающий момент,
— максимальный вращающий момент,
 — критическое скольжение, при котором вращающий момент достигает своего максимального значения, его величина зависит от активного сопротивления цепи ротора. При известном номинальном скольжении критическое определяется по формуле
— критическое скольжение, при котором вращающий момент достигает своего максимального значения, его величина зависит от активного сопротивления цепи ротора. При известном номинальном скольжении критическое определяется по формуле
 .
.
Зависимость вращающего момента от его скольжения или, от скорости вращения ротора называют механической характеристикой двигателя.  ,
,  при
при  ,
,  .
.
Для оценки рабочих свойств двигателя пользуются его рабочими характеристиками. Рабочими характеристиками асинхронного двигателя называют кривые, характеризующие зависимость электромагнитного момента , тока статора  , КПД
, КПД  , и коэффициента мощности на валу
, и коэффициента мощности на валу  от полезной мощности на валу при неизменном напряжении и частоты питающего напряжения , .
от полезной мощности на валу при неизменном напряжении и частоты питающего напряжения , .
В зависимости от конструктивного выполнения роторной обмотки трехфазные асинхронные двигатели разделяются на два типа: двигатели с короткозамкнутым ротором и двигатели с фазным ротором или, как их иначе называют, двигатели с кольцами.
При пуске двигателя с короткозамкнутым ротором скорость вращения ротора в первый момент  , чему соответствует максимальное скольжение
, чему соответствует максимальное скольжение  , двигатель находится в режиме короткого замыкания. Ток в роторе имеет наибольшее значение и наибольший сдвиг фаз по отношению к ЭДС. При этом пусковой ток статора в 4-10 раз больше номинального. Пусковой момент составляет 0,9 — 1,8 от номинального момента. По мере разгона двигателя величина пускового тока быстро уменьшается. Большая величина пускового тока вызывает резкие колебания напряжения в сети, что плохо отражается на работе других потребителей. При включении двигателей в мощные энергосистемы эти колебания нивелируются, поэтому используется прямой пуск — включением обмотки статора на полное напряжение цепи. Для уменьшения пускового тока асинхронных двигателей с короткозамкнутым ротором применяют способы, позволяющие понизить на время пуска напряжение, подводимое к статору: переключение обмотки статора со звезды на треугольник, запуск двигателя через автотрансформатор, включение дополнительного сопротивления в обмотку статора. При запуске двигателя через автотрансформатор уменьшение пускового тока в цепи произойдет в
, двигатель находится в режиме короткого замыкания. Ток в роторе имеет наибольшее значение и наибольший сдвиг фаз по отношению к ЭДС. При этом пусковой ток статора в 4-10 раз больше номинального. Пусковой момент составляет 0,9 — 1,8 от номинального момента. По мере разгона двигателя величина пускового тока быстро уменьшается. Большая величина пускового тока вызывает резкие колебания напряжения в сети, что плохо отражается на работе других потребителей. При включении двигателей в мощные энергосистемы эти колебания нивелируются, поэтому используется прямой пуск — включением обмотки статора на полное напряжение цепи. Для уменьшения пускового тока асинхронных двигателей с короткозамкнутым ротором применяют способы, позволяющие понизить на время пуска напряжение, подводимое к статору: переключение обмотки статора со звезды на треугольник, запуск двигателя через автотрансформатор, включение дополнительного сопротивления в обмотку статора. При запуске двигателя через автотрансформатор уменьшение пускового тока в цепи произойдет в  раз, где
раз, где  — коэффициент трансформации автотрансформатора. Однако недостатком этих способов является уменьшение пускового момента, величина которого пропорциональна квадрату напряжения сети:
— коэффициент трансформации автотрансформатора. Однако недостатком этих способов является уменьшение пускового момента, величина которого пропорциональна квадрату напряжения сети:  .
.
Асинхронный двигатель с фазным ротором пускается в ход с помощью пускового реостата, включенного последовательно с обмоткой ротора.
Пусковые качества двигателей характеризуются коэффициентами кратности пускового тока  и пускового момента
и пускового момента  .
.
Для частоты вращения двигателя используются:
1) изменение частоты вращения магнитного поля (частоты питающего напряжения),
2) переключение пар полюсов,
3) изменение активного сопротивление фазного ротора с помощью трехфазного реостата, включаемого так же как пусковой.
В синхронном двигателе частота вращения двигателя равна частоте вращения магнитного поля:  .
.
Основными характеристиками синхронного двигателя являются угловая, механическая и регулировочная. Угловая характеристика определяет зависимость вращающего момента от угла между ЭДС и напряжением:

где  — угол между векторами ЭДС и напряжения, т.е.
— угол между векторами ЭДС и напряжения, т.е.  ,
,
 — полное индуктивное сопротивление двигателя.
— полное индуктивное сопротивление двигателя.
На специальных электростанциях, покрывающих пиковые нагрузки в энергосистемах, синхронная машина работает генератором в часы максимума нагрузки и двигателем — в остальное время, перекачивая с помощью гидротурбины, которая теперь становится насосом, воду в водохранилище, создавая необходимый запас её для последующей работы. Такие агрегаты называют обратимыми.
Принципиально конструкция синхронной машины такая же, как у машин переменного тока. Синхронная машина так же состоит из двух частей: неподвижной части — статора и вращающейся части — ротора и имеет две обмотки. Одна обмотка подключается к источнику постоянного тока и создает основное магнитное поле машины. Это обмотка возбуждения. Другая обмотка является обмоткой якоря и состоит из одной, двух или трех фаз. В обмотке якоря индуцируется основная ЭДС машины. В синхронных машинах наибольшее распространение получила конструкция, когда обмотка якоря располагается на статоре, а обмотка возбуждения — на роторе.
Особенностью синхронных машин является то, что ротор должен быть раскручен к моменту присоединения переменного тока, при этом должны выполнятся следующие условия: переменный ток, протекающий через обмотку статора, должен быть таким, чтобы его взаимодействие с магнитным полем постоянного тока создавало силу требуемого направления, иначе, вместо того чтобы поддерживать вращение, электромагнитное взаимодействие будет ему препятствовать.
Поэтому для присоединения синхронной машины к сети необходимо не только придать вращению ротора нужную скорость, но и убедиться в том, что ход изменения напряжений на машине и в сети одинаков.
Синхронные машины должны вращаться со строго определенной скоростью. Уменьшение скорости хотя бы на 1% приводит к тому, что изменения тока в обмотке переменного тока перестают соответствовать изменениям в положении обмотки постоянного тока, они как бы выпадают из такта, машина выпадает из синхронизма: обмотка постоянного тока подвергается усилиям, направленным то в одну, то в другую сторону, и машина останавливается.
Синхронные двигатели и синхронные генераторы устроены совершенно одинаково. Во всяком синхронном двигателе, приведенном во вращение, начинает наводиться ЭДС, если только в его обмотке возбуждения протекает ток.
Для того чтобы увеличивать или уменьшать напряжение синхронного генератора, нужно изменять величину постоянного тока, при этом будет изменяться величина магнитного потока, чем больше будет изменяющийся магнитный поток, тем больше будет и напряжение, наводимое в машине (разумеется, при постоянстве других условий).
Постоянный ток, создающий магнитное поле в синхронной машине, называют током возбуждения. Чем больше ток возбуждения, тем больше напряжение, наводимое в машине.







