Способы и схемы управления тиристором или симистором
Тиристоры нашли широкое применение в полупроводниковых устройствах и преобразователях. Различные источники питания, частотные преобразователи, регуляторы, возбудительные устройства для синхронных двигателей и много других устройств строились на тиристорах, а в последнее время их вытесняют преобразователи на транзисторах. Основной задачей для тиристора является включение нагрузки в момент подачи управляющего сигнала. В этой статье мы рассмотрим, как управлять тиристорами и симисторами.

Определение
Тиристор (тринистор) — это полупроводниковый полууправляемый ключ. Полууправляемый — значит, что вы можете только включать тиристор, отключается он только при прерывании тока в цепи или если приложить к нему обратное напряжение.
Он, подобно диоду, проводит ток только в одном направлении. То есть для включения в цепь переменного тока для управления двумя полуволнами нужно два тиристора, для каждой по одному, хотя не всегда. Тиристор состоит из 4 областей полупроводника (p-n-p-n).
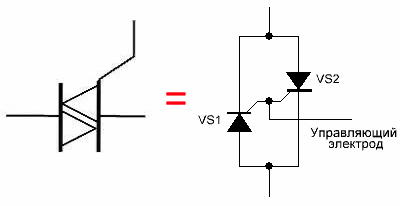
Другой подобный прибор называется симистор — двунаправленный тиристор. Его основным отличием является то, что ток он может проводить в обе стороны. Фактически он представляет собой два тиристора соединённых параллельно навстречу друг другу.
Основные характеристики
Как и любых других электронных компонентов у тиристоров есть ряд характеристик:
Падение напряжения при максимальном токе анода (VT или Uос).
Прямое напряжение в закрытом состоянии (VD(RM) или Uзс).
Обратное напряжение (VR(PM) или Uобр).
Прямой ток (IT или Iпр) – это максимальный ток в открытом состоянии.
Максимально допустимый прямой ток (ITSM) — это максимальный пиковый ток в открытом состоянии.
Обратный ток (IR) — ток при определенном обратном напряжении.
Постоянный ток в закрытом состоянии при определенном прямом напряжении (ID или Iзс).
Постоянное отпирающее напряжение управления (VGT или UУ).
Ток управления (IGT).
Максимальный ток управления электрода IGM.
Максимально допустимая рассеиваемая мощность на управляющем электроде (PG или Pу)
Принцип работы
Когда на тиристор подают напряжение он не проводит ток. Есть два способа включит его – подать напряжение между анодом и катодом достаточное для открытия, тогда его работа ничем не будет отличаться от динистора.
Другой способ – это подать кратковременный импульс на управляющий электрод. Ток открытия тиристора лежит в пределах 70-160 мА, хотя на практике эта величина, как и напряжение которое нужно приложить к тиристору зависит от конкретной модели и экземпляра полупроводникового прибора и даже от условий, в которых он работает, таких, например, как температура окружающей среды.
Кроме управляющего тока, есть такой параметр как ток удержания — это минимальный ток анода для удержания тиристора в открытом состоянии.
После открытия тиристора управляющий сигнал можно отключать, тиристор будет открыт до тех пор, пока через него протекает прямой ток и подано напряжение. То есть в цепи переменного тиристор будет открыт в течении той полуволны напряжение которой смещает тиристор в прямом направлении. Когда напряжение устремится к нулю, снизится и ток. Когда ток в цепи упадет ниже величины тока удержания тиристора — он закроется (выключится).
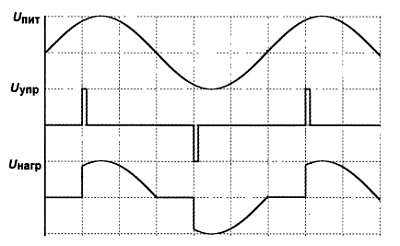
Полярность управляющего напряжения должна совпадать с полярностью напряжения между анодом и катодом, что вы наблюдаете на осциллограммах выше.
Управление симистором аналогично хоть и имеет некоторые особенности. Для управления симистором в цепи переменного тока нужно два импульса управляющего напряжения — на каждую полуволну синусоиды соответственно.
После подачи управляющего импульса в первой полуволне (условно положительной) синусоидального напряжения ток через симистор будет протекать до начала второй полуволны, после чего он закроется, как и обычный тиристор. После этого нужно подать еще один управляющий импульс для открытия симистора на отрицательной полуволне. Это наглядно проиллюстрировано на следующих осциллограммах.
Полярность управляющего напряжения должна соответствовать полярности приложенного напряжения между анодом и катодом. Из-за этого возникают проблемы при управлении симисторами с помощью цифровых логических схем или от выходов микроконтроллера. Но это легко решается путем установки симисторного драйвера, о чем мы поговорим позже.
Распространенные схемы управления тиристорами или симисторами
Самой распространенной схемой является симисторный или тиристорный регулятор.
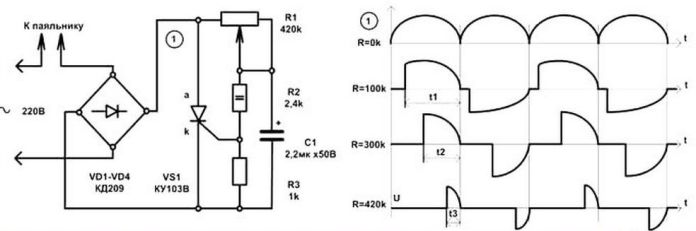
Здесь тиристор открывается после того как на конденсаторе будет достаточная величина для его открытия. Момент открытия регулируется с помощью потенциометра или переменного резистора. Чем больше его сопротивление — тем медленнее заряжается конденсатор. Резистор R2 ограничивает ток через управляющий электрод.
Эта схема регулирует оба полупериода, то есть вы получаете полную регулировку мощности почти от 0% и почти до 100%. Это удалось достичь, установив регулятор в диодном мосте, таким образом регулируется одна из полуволн.
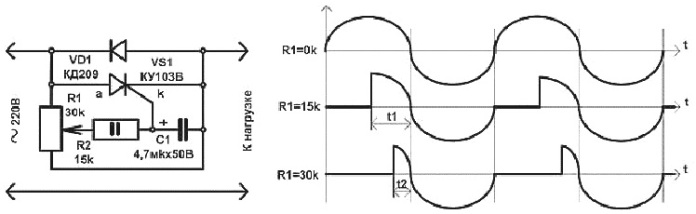
Упрощенная схема изображена ниже, здесь регулируется лишь половина периода, вторая полуволна проходит без изменения через диод VD1. Принцип работы аналогичен.
Симисторный регулятор без диодного моста позволяет управлять двумя полуволнами.
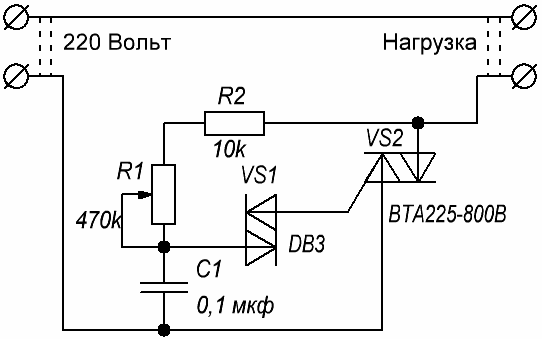
По принципу действия почти аналогична предыдущим, но построена на симисторе с её помощью регулируются уже обе полуволны. Отличия заключаются в том, что здесь импульс управления подаётся с помощью двунаправленного динистора DB3, после того как конденсатор зарядится до нужного напряжения, обычно это 28-36 Вольт. Скорость зарядки также регулируется переменным резистором или потенциометром. Такая схема реализована в большинстве бытовых диммеров.

Такие схемы регулировки напряжения называется СИФУ — система импульсного фазового управления.
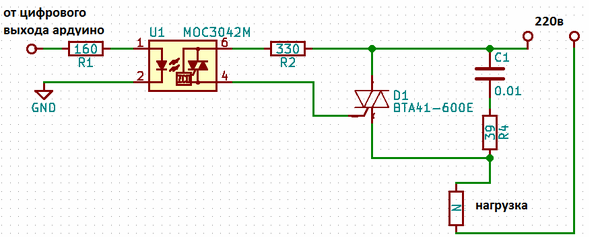
На рисунке выше изображен вариант управления симистором с помощью микроконтроллера, на примере популярной платформы Arduino. Симисторный драйвер состоит из оптосимистора и светодиода. Так как в выходной цепи драйвера установлен оптосимистор на управляющий электрод всегда подаётся напряжение нужной полярности, но здесь есть некоторые нюансы.
Дело в том, что для регулировки напряжения с помощью симистора или тиристора нужно подавать управляющий сигнал в определенный момент времени, так чтобы срез фазы происходил до нужной величины. Если наугад стрелять управляющими импульсами — схема работать конечно будет, но регулировок добиться не выйдет, поэтому нужно определять момент перехода полуволны через ноль.
Так как для нас не имеет значения полярность полуволны в настоящий момент времени — достаточно просто отслеживать момент перехода через ноль. Такой узел в схеме называют детектор нуля или нуль-детектор, а в англоязычных источниках «zero crossing detector circuit» или ZCD. Вариант такой схемы с детектором перехода через ноль на транзисторной оптопаре выглядит следующим образом:
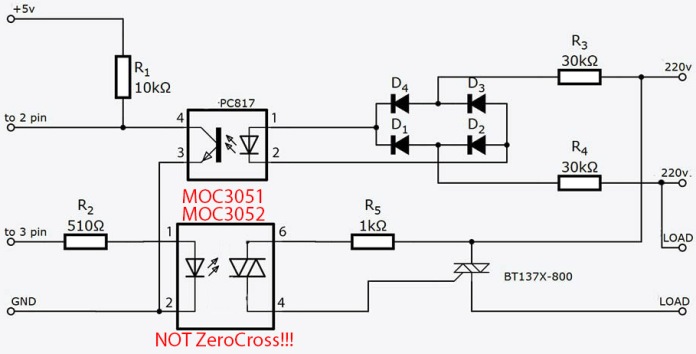
Оптодрайверов для управления симисторами есть множество, типовые – это линейка MOC304x, MOC305x, MOC306X, произведенные компанией Motorola и другими. Более того – эти драйверы обеспечивают гальваническую развязку, что убережет ваш микроконтроллер в случае пробоя полупроводникового ключа, что вполне возможно и вероятно. Также это повысит безопасность работы с цепями управления, полностью разделив цепь на «силовую» и «оперативную».
Заключение
Мы рассказали базовые сведения о тиристорах и симисторах, а также управлении ими в цепях с «переменкой». Стоит отметить, что мы не затрагивали тему запираемых тиристоров, если вас интересует этот вопрос – пишите комментарии и мы рассмотрим их подробнее. Также не были рассмотрены нюансы использования и управления тиристорами в силовых индуктивных цепях. Для управления «постоянкой» лучше использовать транзисторы, поскольку в этом случае вы решаете, когда ключ откроется, а когда он закроется, повинуясь управляющему сигналу…
Тиристорное управление асинхронным двигателем с короткозамкнутым ротором
 Для управления асинхронным двигателем могут использоваться тиристоры в сочетании с релейно-контакторными аппаратами. Тиристоры применяются в качестве силовых элементов и включаются в статорную цепь, релейно-контакторные аппараты включаются в цепь управления.
Для управления асинхронным двигателем могут использоваться тиристоры в сочетании с релейно-контакторными аппаратами. Тиристоры применяются в качестве силовых элементов и включаются в статорную цепь, релейно-контакторные аппараты включаются в цепь управления.
Используя тиристоры в качестве силовых коммутаторов, можно на статор при пуске подавать напряжение от нуля до номинального значения, ограничивать токи и моменты двигателя, осуществлять эффективное торможение либо шаговый режим работы. Такая схема приведена на рис. 1.
Силовая часть схемы состоит из группы тиристоров VS1. VS4, включенных встречно-параллельно в фазы А и С. Между фазами А и В включен короткозамыкающий тиристор VS5. Схема состоит из силовой цепи (рис. 1, а), цепи управления (рис. 1, б) и блока управления тиристорами — БУ (рис. 1, в).
Для пуска двигателя включается автоматический выключатель QF, нажимается кнопка SB1 «Пуск», в результате чего включаются контакторы КМ1 и КМ2. На управляющие электроды тиристоров VS1. VS4 подаются импульсы, сдвинутые на 60° относительно питающего напряжения. К статору двигателя прикладывается пониженное напряжение, что приводит к снижению пускового тока и пускового момента.
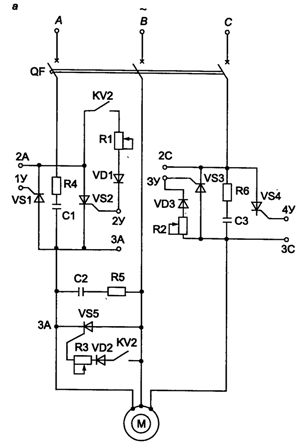
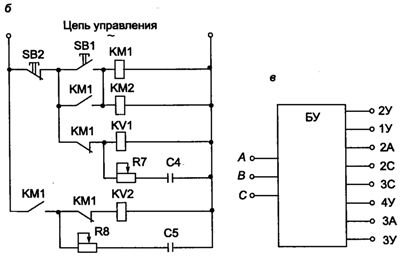
Рис. 1. Тиристорное управление асинхронным двигателем с короткозамкнутым ротором
Размыкающий контакт КМ1 отключает реле KV1 с выдержкой времени, которая определяется резистором R7 и конденсатором С4. Размыкающими контактами реле KV1 шунтируются соответствующие резисторы в блоке управления, и на статор подается полное напряжение сети.
Для торможения нажимается кнопка SB2 «Стоп». Схема управления теряет питание, отключаются тиристоры VS1. VS4. Это приводит к тому, что на период торможения включается реле KV2 за счет энергии, запасенной конденсатором С5, и своими контактами включает тиристоры VS2 и VS5. Через фазы А и В статора проходит постоянный ток, который регулируется резисторами R1 и R3. Обеспечивается эффективное динамическое торможение.
Тиристорный электропривод
 В промышленности широкое распространение получили приводы с управляемыми полупроводниковыми вентилями — тиристорами. Тиристоры изготовляют на ток, доходящий до сотен ампер, на напряжение до 1000 и более вольт. Они отличаются высоким к. п. д., относительно малыми размерами, высоким быстродействием и способностью работать в широком диапазоне температуры окружающей среды (от -60 до +60 °С).
В промышленности широкое распространение получили приводы с управляемыми полупроводниковыми вентилями — тиристорами. Тиристоры изготовляют на ток, доходящий до сотен ампер, на напряжение до 1000 и более вольт. Они отличаются высоким к. п. д., относительно малыми размерами, высоким быстродействием и способностью работать в широком диапазоне температуры окружающей среды (от -60 до +60 °С).
Тиристор представляет собой не полностью управляемый прибор, который включается подачей соответствующего потенциала на управляющий электрод, а отключается только принудительным разрывом цепи тока за счет отключения напряжения, естественного перехода его через нуль или подачи гасящего напряжения обратного знака. Изменением момента подачи управляющего напряжения (его задержкой) можно регулировать среднее значение выпрямленного напряжения и тем самым скорость двигателя.
Среднее значение выпрямленного напряжения при отсутствии регулирования в основном определяется схемой включения тиристорного преобразователя. Схемы преобразователей делятся на два класса: с нулевым выводом и мостовые.
В установках средней и большой мощности преимущественно используются мостовые схемы преобразователей, что в основном обусловлено двумя причинами:
меньшим напряжением на каждом из тиристоров,
отсутствием постоянной составляющей тока, протекающего по обмоткам трансформатора.
Схемы преобразователей могут также отличаться числом фаз: от одной в установках малой мощности до 12 — 24 в мощных преобразователях.
Все варианты тиристорных преобразователей наряду с положительными свойствами, как-то малой инерционностью, отсутствием вращающихся элементов, меньшими (по сравнению с электромеханическими преобразователями) габаритами, обладают и рядом недостатков:
1. Жесткая связь с питающей сетью: все колебания напряжения в сети непосредственно передаются в систему привода, а толчки нагрузки на оси двигателя немедленно передаются в сеть и вызывают всплески тока.
2. Низкий коэффициент мощности при регулировании напряжения в сторону снижения.
3. Генерация высших гармонических, загружающих питающую сеть.
Механическая характеристика двигателя, питаемого от тиристорного преобразователя, определяется напряжением, приложенным к якорю, и характером его изменения с нагрузкой, т. е. внешней характеристикой преобразователя и параметрами преобразователя и двигателя.
Устройство и принцип действия тиристора
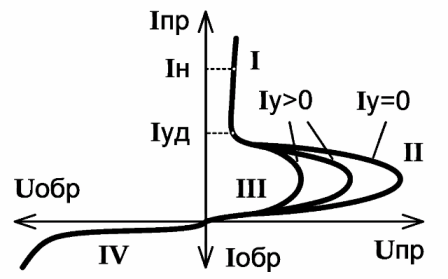
Тиристор (рис. 1 , а) представляет собой четырехслойный кремниевый полупроводник с двумя р-n-переходами и одним n- р-переходом. Величина силы тока I , проходящего через тиристор под действием анодного напряжения Uа, зависит от тока I у управления, проходящего через управляющий электрод под действием напряжения Uy управления.
Если ток управления отсутствует ( I у = 0), то при повышении напряжения U а ток I в цепи потребителя П будет нарастать, оставаясь, однако, весьма малым по величине (рис. 1 , б).


Рис. 1. Структурная схема (а), вольтамперная характеристика (б) и конструктивное оформление (в) тиристора
В это время переход n-р, включенный в непроводящем направлении, обладает большим сопротивлением. При определенном значении Ua1 анодного напряжения, называемом напряжением открывания, зажигания или переключения, наступает лавинный пробой запирающего слоя. Его сопротивление становится малым, а сила тока возрастает до значения, определяемого, в соответствии с законом Ома, сопротивлением Rп потребителя П.
При увеличении силы тока Iу напряжение Ua уменьшается. Ток Iу, при котором напряжение Ua достигает наименьшего значения, называют током Iс спрямления.
Закрывание тиристора происходит при снятии напряжения Ua или при изменении его знака. Номинальной силой тока Iн тиристора называют наибольшее среднее значение силы тока, проходящего в прямом направлении, не вызывающее недопустимого перегрева.
Номинальным напряжением U н называют наибольшее допустимое амплитудное напряжение, при котором обеспечивается заданная надежность прибора.
Падение напряжения Δ U н , созданное номинальным током, называют номинальным падением напряжения (обычно Δ U н = 1 — 2 В).
Величина силы тока Iс спрямления колеблется в пределах 0,1 — 0,4 А при напряжении Uc 6 — 8 В.
Тиристор надежно открывается при длительности импульса в 20 — 30 мкс. Интервал между импульсами не должен быть менее 100 мкс. Когда напряжение Ua уменьшается до нуля, тиристор запирается.
Внешнее конструктивное оформление тиристора приведено на рис. 1, в . На медном основании 1 с шестигранной огранкой и хвостовиком с резьбой укрепляется кремниевая четырехслойная структура 2 с силовым отрицательным 3 и управляющим 4 выводами. Кремниевая структура защищена металлическим кожухом 5 цилиндрической формы. В кожухе укреплен изолятор 6. Резьбу в основании 1 используют для установки тиристора и для присоединения к положительному полюсу источника анодного напряжения.
При увеличении напряжения Ua уменьшается ток управления, необходимый для открывания тиристора (см. рис. 1 , б). Ток управления открывания пропорционален напряжению uуо управления открывания.
Если U а меняется по закону синуса (рис. 2 ), то необходимые напряжения и 0 открывания могут быть изображены штриховой линией. Если приложенное напряжение управления Uy 1 постоянно и его значение ниже минимального значения напряжения uуо , то тиристор не открывается.
Если напряжение управления увеличить до значения Uy2, то тиристор откроется, как только напряжение Uy2 окажется больше напряжения uуо. Изменяя величину uу, можно изменять угол открывания тиристора в пределах от 0 до 90 о .
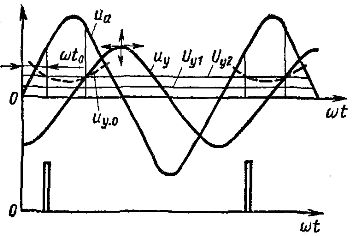
Рис. 2. Управление тиристором
Для открывания тиристора при углах, превышающих 90°, применяют переменное напряжение управления uу, изменяющееся, например, синусоидально. При напряжении, соответствующем точке пересечения синусоидой этого напряжения штриховой кривой uуо = f( ωt) , т иристор открывается.
Смещая синусоиду uуо по горизонтали вправо или влево, можно изменять угол ωt 0 открывания тиристора. Такое управление углом открывания называют горизонтальным. Его осуществляют посредством специальных фазосмещателей.
Смещая ту же синусоиду по вертикали вверх или вниз, также можно изменять угол открывания. Такое управление называют вертикальным. В этом случае с переменным напряжением управления u у алгебраически складывают постоянное напряжение, например, напряжение Uy 1 . Угол открывания регулируют путем изменения величины этого напряжения.
После открывания тиристор остается открытым до конца положительного полупериода, и напряжение управления не влияет на его работу. Это позволяет применить также импульсное управление, периодически подавая положительные импульсы напряжения управления в нужные моменты времени (рис. 2 внизу). При этом повышается четкость управления.
Изменяя тем или иным способом угол открывания тиристора, можно подавать на потребитель импульсы напряжения различной формы. При этом изменяется величина среднего значения напряжения на зажимах потребителя.
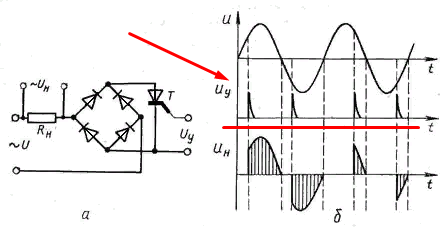
Для управления тиристорами применяют различные устройства. В схеме, показанной на рис. 3 , напряжение сети переменного тока подается на первичную обмотку трансформатора Tp 1 .
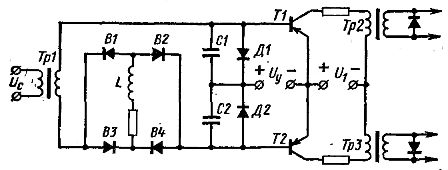
Рис. 3. Схема управления тиристорами
В цепь вторичной обмотки этого трансформатора включен двухполупериодный выпрямитель B 1 , В2, В 3 , В4 со значительной индуктивностью L в цепи постоянного тока. Пульсации выпрямленного тока при этом практически устраняются. Но такой постоянный ток может быть получен лишь при двухполупериодном выпрямлении переменного тока, имеющего форму, показанную на рис. 4 , а.
Таким образом, в данном случае выпрямитель В1, В2, ВЗ, В4 (см. рис. 3) является преобразователем формы переменного тока. При такой схеме конденсаторы С1 и С2 попеременно заряжаются прямоугольными импульсами тока (рис. 4, а). При этом на обкладках конденсаторов С1 и С2 образуется пилообразное напряжение (рис. 4, б), приложенное к базам транзисторов Т1 и Т2 (см. рис. 3).
Это напряжение называют опорным. В цепи базы каждого транзистора действует также и напряжение Uy постоянного тока. Когда пилообразное напряжение равно нулю, напряжение Uy создает на базах обоих транзисторов положительные потенциалы. Каждый транзистор открывается током базы при отрицательном потенциале на базе.
Это происходит, когда отрицательные значения пилообразного опорного напряжения оказываются большими, чем Uy (рис. 4, б). Это условие выполняется в зависимости от величины Uy при различных значениях фазового угла. При этом транзистор открывается на различные промежутки времени в зависимости от величины напряжения Uy.
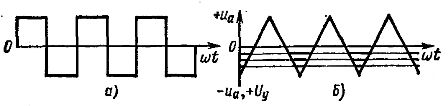
Рис. 4. Графики напряжений управления тиристорами
Когда тот или другой транзистор открывается, через первичную обмотку трансформатора Тр2 или Тр3 (см. рис. 3) проходит прямоугольный импульс тока. При прохождении переднего фронта этого импульса во вторичной обмотке возникает импульс напряжения, который подается на управляющий электрод тиристора.
При прохождении заднего фронта импульса тока во вторичной обмотке возникает импульс напряжения противоположной полярности. Этот импульс замыкается полупроводниковым диодом, шунтирующим вторичную обмотку, и на тиристор не подается.
При управлении тиристорами (см. рис. 3) двумя трансформаторами создают два импульса, сдвинутых по фазе на 180°.
Системы тиристорного управления двигателями
В системах тиристорного управления двигателями постоянного тока изменение постоянного напряжения на якоре двигателя используют для регулирования его частоты вращения. В этих случаях обычно используют схемы многофазного выпрямления.
На рис. 5, а сплошной линией показана простейшая схема такого рода. В этой схеме каждый из тиристоров Т1, Т2, Т3 включен последовательно со вторичной обмоткой трансформатора и якорем электродвигателя; э. д. с. вторичных обмоток сдвинуты по фазе. Поэтому на якорь двигателя при управлении углом открывания тиристорами подаются импульсы напряжения, сдвинутые по фазе друг относительно друга.
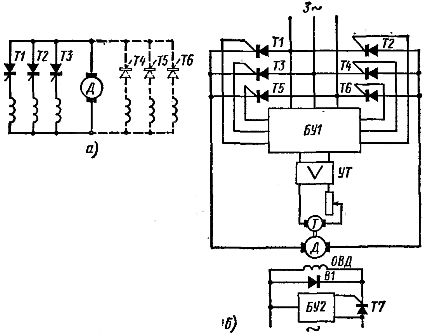
Рис. 5. Схемы тиристорного привода
В многофазной схеме, в зависимости от выбранного угла зажигания тиристоров, через якорь двигателя могут протекать прерывистые и непрерывные токи. У реверсивного электропривода (рис. 5, а, вся схема) используют два комплекта тиристоров: Т1, Т2, Т3 и Т4, Т5, Т6.
Открывая тиристоры той или иной группы, изменяют направление тока в якоре электродвигателя и, следовательно, направление его вращения.
Реверс двигателя может быть также осуществлен путем изменения направления тока в обмотке возбуждения электродвигателя. Такой реверс применяют в тех случаях, когда не требуется высокого быстродействия, поскольку обмотка возбуждения обладает по сравнению с обмоткой якоря весьма высокой индуктивностью. Такой реверс часто применяют для тиристорных приводов главного движения металлорежущих станков.
Второй комплект тиристоров позволяет также осуществить тормозные режимы, требующие изменения направления тока в цепи якоря электродвигателя. Тиристоры в рассматриваемых схемах привода используют для включения и отключения двигателя, а также для ограничения величины пускового и тормозного тока, исключая необходимость применения контакторов, а также пусковых и тормозных реостатов.
В схемах тиристорного электропривода постоянного тока силовые трансформаторы нежелательны. Они повышают размеры и стоимость установки, поэтому часто используют схему, приведенную на рис. 5, б.
В этой схеме управления зажиганием тиристоров осуществляет блок управления БУ1. Его присоединяют к сети трехфазного тока, обеспечивая этим питание и согласование фаз импульсов управления с анодным напряжением тиристоров.
В тиристорном приводе обычно применяют обратную связь по частоте вращения электродвигателя. При этом используют тахогенератор Т и промежуточный транзисторный усилитель УТ. Применяют также обратную связь по э. д. с. электродвигателя, осуществляемую путем одновременного действия отрицательной обратной связи по напряжению и положительной обратной связи по току якоря.
Для регулирования тока возбуждения применяют тиристор Т7 с блоком управления БУ2. В отрицательные полупериоды анодного напряжения, когда тиристор Т7 не пропускает ток, ток в ОВД продолжает протекать за счет э. д. с. самоиндукции, замыкаясь через шунтирующий вентиль В1.
Тиристорные электроприводы с широтно-импульсным управлением
В рассмотренных тиристорных приводах питание двигателя осуществляется импульсами напряжения частотой 50 Гц. В целях увеличения быстродействия частоту импульсов целесообразно повышать. Это достигается в тиристорных приводах с широтно-импульсным управлением, где через якорь двигателя пропускают прямоугольные импульсы постоянного тока различной длительности (широты) частотой до 2-5 кГц. Помимо высокого быстродействия такое управление обеспечивает большие диапазоны регулирования частоты вращения электродвигателя и более высокие энергетические показатели.
При широтно-импульсном управлении двигатель питается от неуправляемого выпрямителя, а тиристор, включенный последовательно с якорем, периодически закрывается и открывается. При этом через цепь якоря двигателя проходят импульсы постоянного тока. Изменение длительности (широты) этих импульсов приводит к изменению частоты вращения электродвигателя.
Поскольку в данном случае тиристор работает под постоянным напряжением, для его закрывания применяют особые схемы. Одна из простейших схем широтно-импульсного управления приведена на рис. 6.
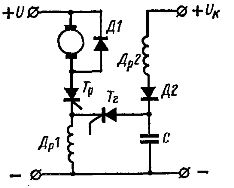
Рис. 6. Тиристорный электропривод с широтно-импульсным управлением
В этой схеме тиристор Тр запирается при включении тиристора Тг гашения. При открывании этого тиристора заряженный конденсатор С разряжается на дроссель Др1, создавая в нем значительную э. д. с. При этом на концах дросселя возникает напряжение, большее, чем напряжение U силового выпрямителя и направленное ему навстречу.
Через силовой выпрямитель и шунтирующий диод Д1 это напряжение подается на тиристор Тр и вызывает его запирание. При запирании тиристора конденсатор С вновь заряжается до напряжения коммутации Uк > U.
Вследствие повышенной частоты импульсов тока и инерции якоря двигателя импульсный характер питания на плавности вращения двигателя практически не отражается. Тиристоры Тр и Тг открываются посредством специальной фазосмещающей схемы, позволяющей изменять ширину импульса.
Электропромышленность выпускает различные модификации комплектных регулируемых тиристорных электроприводов постоянного тока мощностью. Среди них имеются приводы с диапазонами регулирования частоты вращения 1:20; 1:200; 1:2000 путем изменения напряжения, нереверсивные и реверсивные приводы, с электрическим торможением и без него. Управление осуществляется транзисторными фазоимпульсными устройствами. В приводах используют отрицательные обратные связи по частоте вращения двигателей и по противо-э. д. с.
Преимуществами тиристорных приводов являются высокие энергетические показатели, малые размеры и масса, отсутствие каких-либо вращающихся машин помимо электродвигателя, высокое быстродействие, постоянная готовность к работе. Основным недостатком тиристорных приводов является их пока еще высокая стоимость, значительно превышающая стоимость приводов с электромашинными и магнитными усилителями.
В настоящее время существует устойчивая тенденция повсеместной замены тиристорных электроприводов постоянного тока на частотно-регулируемые электроприводы переменного тока.







