Тиристорное управление асинхронным двигателем с короткозамкнутым ротором
 Для управления асинхронным двигателем могут использоваться тиристоры в сочетании с релейно-контакторными аппаратами. Тиристоры применяются в качестве силовых элементов и включаются в статорную цепь, релейно-контакторные аппараты включаются в цепь управления.
Для управления асинхронным двигателем могут использоваться тиристоры в сочетании с релейно-контакторными аппаратами. Тиристоры применяются в качестве силовых элементов и включаются в статорную цепь, релейно-контакторные аппараты включаются в цепь управления.
Используя тиристоры в качестве силовых коммутаторов, можно на статор при пуске подавать напряжение от нуля до номинального значения, ограничивать токи и моменты двигателя, осуществлять эффективное торможение либо шаговый режим работы. Такая схема приведена на рис. 1.
Силовая часть схемы состоит из группы тиристоров VS1. VS4, включенных встречно-параллельно в фазы А и С. Между фазами А и В включен короткозамыкающий тиристор VS5. Схема состоит из силовой цепи (рис. 1, а), цепи управления (рис. 1, б) и блока управления тиристорами — БУ (рис. 1, в).
Для пуска двигателя включается автоматический выключатель QF, нажимается кнопка SB1 «Пуск», в результате чего включаются контакторы КМ1 и КМ2. На управляющие электроды тиристоров VS1. VS4 подаются импульсы, сдвинутые на 60° относительно питающего напряжения. К статору двигателя прикладывается пониженное напряжение, что приводит к снижению пускового тока и пускового момента.
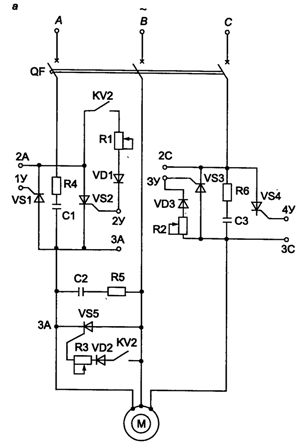
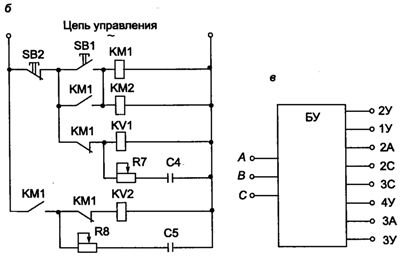
Рис. 1. Тиристорное управление асинхронным двигателем с короткозамкнутым ротором
Размыкающий контакт КМ1 отключает реле KV1 с выдержкой времени, которая определяется резистором R7 и конденсатором С4. Размыкающими контактами реле KV1 шунтируются соответствующие резисторы в блоке управления, и на статор подается полное напряжение сети.
Для торможения нажимается кнопка SB2 «Стоп». Схема управления теряет питание, отключаются тиристоры VS1. VS4. Это приводит к тому, что на период торможения включается реле KV2 за счет энергии, запасенной конденсатором С5, и своими контактами включает тиристоры VS2 и VS5. Через фазы А и В статора проходит постоянный ток, который регулируется резисторами R1 и R3. Обеспечивается эффективное динамическое торможение.
Асинхронный двигатель с тиристорным регулятором напряжения
Скорость асинхронного двигателя (АД) можно регулировать изменением напряжения, подводимого к статору, при этом частота напряжения на двигателе не изменяется и равна частоте сети 50 Гц.
Для регулирования напряжения на статоре АД (рис. 8.11) наибольшее распространение получили тиристорные регуляторы напряжения (ТРН), которые обладают большим быстродействием, высоким КПД, небольшой стоимостью. В каждую фазу трехфазного ТРН включаются два тиристора по встречно-параллельной схеме, которая обеспечивает протекание тока в нагрузке в оба полупериода напряжения сети U1. Тиристоры получают импульсы управления Ua от системы импульсно-фазового управления (СИФУ), которая обеспечивает их сдвиг на угол управления αа в функции внешнего сигнала Uy. Изменяя угол управления αа от 0 до 180°, можно регулировать напряжение на статоре от полного напряжения сети U1 до нуля. Форма напряжения статора является несинусоидальной.
Несинусоидальное напряжение представим как совокупность нес-кольких синусоидальных напряжений –— гармоник с определенной час-тотой. Частота изменения первой из них (основной) равна частоте питающего напряжения f1,ь а частоты других гармоник больше, чем первой. Основная гармоника имеет наибольшую амплитуду, и по ней ведутся все основные расчеты.На рис.8.14,(б)показаны механические характеристики АД при изменении напряжения на его статоре.
Регулирование напряжения на статоре не приводит к изменению скорости ХХωw0 и не влияет на критическое скольжение sK, но изменяет значение критического (максимального) момента МKк. Критический момент пропорционален квадрату напряжения: МK к
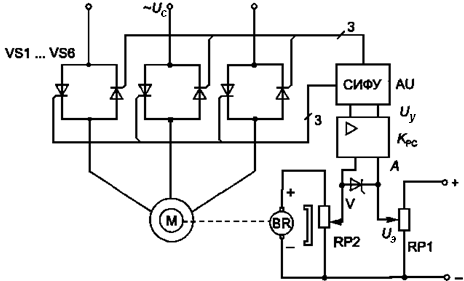
Рис. 8.11.Схема асинхронного ЭП с тиристорным пусковым устройством
Скольжение s определяется зависимостью, где ω0 – скорость идеаль-
ного холостого хода АД:
Скольжение sопределяется зависимостью
где w0 — скорость идеального холостого хода АД.
Полная мощность на валу, включающая потери на трение и венти-ляцию:
где М – — электромагнитный момент двигателя.
Полная электромагнитная мощность, передаваемая от статора к ро-тору через воздушный зазор:
Разность мощностей  рассеивается в виде теплоты в активных сопротивлениях ротора. Потери в роторе определяются как
рассеивается в виде теплоты в активных сопротивлениях ротора. Потери в роторе определяются как
 . (8.1)
. (8.1)
Часть электромагнитной мощности, пропорциональная скольжению s, рассеивается в виде теплоты в обмотке ротора, другая часть, пропор-циональная (1 — s), передается на вал двигателя, т.е.
 (8.2)
(8.2)
Т. о.,Способ регулирования скорости изменением напряжения является неэкономичным, так как потери в роторе при постоянном моменте наг-рузки возрастают пропорционально скольжению.
Из (8.1) получим выражение длямомент двигателя:
 , (8.3)
, (8.3)
где т –— число фаз статора; r2–— сопротивление ротора.
 .
.
В установившемся режиме работы момент двигателя М равен мо-менту сопротивления МсМС. Для вентиляторной нагрузки

Вывод. Токи АД  обратно пропорциональны
обратно пропорциональны  .
.
Продифференцировав последнее выражение, легко показать, что токи имеют максимальное значение при s = 1/3 или ωw = 2/Зωw0. Для постоянного момента нагрузки полу-чаем:
 .
.
| Рис. 8.12. Характеристика АД с повышенным сопротивлением статора |
Cопротивление ротора является важным параметром, влияющим на токи двигателя. Для получения удов-летворительных режимов работы двигателя с вентиляторным моментом сопротивления на валу необходимо применять двигатели с повышенным сопротивлением ротора, обеспечи-вающим номинальное скольжение 10. 12 %. При работе с постоянным моментом нагрузки сопротивление ротора должно быть еще больше.
На рис. 8.12 приведены харак-теристики двигателя с повышенным сопротивлением ротора. Их сравнение с характеристиками на рис. 8.11 показывает, что при применении двигателя с повышенным сопротив-лением ротора удается несколько увеличить диапазон регулирования. Для рассматриваемого способа используются также двигатели с пере-менным сопротивлением ротора. Обычные глубокопазовые или двух-кле-точные двигатели в этих случаях оказываются малоэффективными. Луч-шие характеристики имеют двигатели с массивным ротором или клиньями, изготовленными в виде постоянных магнитов. В этом случае нагрев двигателя уменьшается, так как часть потерь в роторной цепи рассеивается вне двигателя.
Все перечисленные мероприятия не могут существенноо устранить потери в роторной цепи,что сильно ограничивает диапазон регулирования в этой системе. Для реверса АД, (см. рис.7.8,а) могут быть использованы 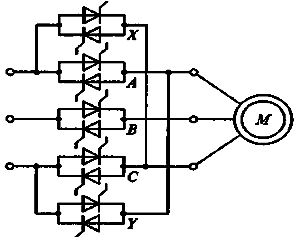 обычные контакторы, которые переклю-чают два провода в цепи статора при отсутствии тока в силовой цепи, за счет предварительного устранить потери в роторной цепи, что сильно ограничивает диапазон регулирования в этой системе. Для реверса АД, рис.7.8,а, могут быть использованы обычные контакторы, которые переключают два провода в цепи статора при отсутствии тока в силовой цепи за счет предварительного запирания тиристоров. Бестоковая коммутация позволяет повы-сить безотказность работы контакторов. Реверсирование фаз статора можно осущес-твить также бесконтактным способом за счет включения дополнительных тиристор-ных групп (рис.8.13). При прямом враще-нии двигателя тиристоры дополнительных групп Х иУ закрыты.
обычные контакторы, которые переклю-чают два провода в цепи статора при отсутствии тока в силовой цепи, за счет предварительного устранить потери в роторной цепи, что сильно ограничивает диапазон регулирования в этой системе. Для реверса АД, рис.7.8,а, могут быть использованы обычные контакторы, которые переключают два провода в цепи статора при отсутствии тока в силовой цепи за счет предварительного запирания тиристоров. Бестоковая коммутация позволяет повы-сить безотказность работы контакторов. Реверсирование фаз статора можно осущес-твить также бесконтактным способом за счет включения дополнительных тиристор-ных групп (рис.8.13). При прямом враще-нии двигателя тиристоры дополнительных групп Х иУ закрыты.
| Рис. 8.13. Схема тиристорного регулятора напряжения для реверсивной схемы |
| Рис. 8.14. Схема несимметричного регулятора напряжения асинхронного двигателя |
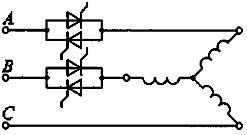 Управляющие импульсы к этим ти-ристорам подаются в том случае, если группы А и С закрыты. При этом изме-няется порядок чередования фаз прило-женного напряжения к статору напряже-ния, и двигатель реверсируется. Группы Х и У должны открыватьсяпосле полного запирания групп A и C, в противном случае возникает режим КЗ. Для предотвращения режима КЗ в фазы статора включают датчики тока, которые запрещают перек-лючение тиристорных групп до тех пор, пока токи не станут равными нулю. На рис. 8.17 приведена схема, которая содержит только две пары тиристоров, а третья фаза наг-рузки подключена непосредственно к сети.
Управляющие импульсы к этим ти-ристорам подаются в том случае, если группы А и С закрыты. При этом изме-няется порядок чередования фаз прило-женного напряжения к статору напряже-ния, и двигатель реверсируется. Группы Х и У должны открыватьсяпосле полного запирания групп A и C, в противном случае возникает режим КЗ. Для предотвращения режима КЗ в фазы статора включают датчики тока, которые запрещают перек-лючение тиристорных групп до тех пор, пока токи не станут равными нулю. На рис. 8.17 приведена схема, которая содержит только две пары тиристоров, а третья фаза наг-рузки подключена непосредственно к сети.

Схема регулятора напряжения может содержать только два тирис-тора, включенных в одну из фаз статора двигателя. Однако в несиммет-ричных схемах усугубляются проблемы, связанные с нагревом двига-теля, так как нагрузка между его фазами распределяется неравномерно и некоторые фазы оказываются сильно перегруженными. Для несиммет-ричной нагрузки линейные напряжения, приложенные к зажимам статора в общем случае не равны друг другу

Если магнитная цепь АД не насыщена, то система несимметричных напряжений с помощью метода симметричных составляющих заменяется двумя системами симметричных напряжений прямой и обратной после-довательностей, которым соответствуют магнитные потоки двигателя, вращающиеся в противоположных направлениях. Если принять угловую скорость прямого поля ωwпр = ωwо за положительную, то угловая скорость обратного поля ωwобр = -ωwо В соответствии с этим скольжение относительно поля прямой последовательности вычисляется по формуле

а последовательности:относительно поля обратной последовательности по формуле

Момент, развиваемый двигателем при асимметричной системе нап-ряжений, равен алгебраической сумме моментов, обусловленных полями прямой и обратной последовательностей::
 .
.
Поскольку каждая из рассматриваемых систем напряжений симмет-рична, для них справедливы известные формулы расчета момента АД.
Несмотря на все отмеченные недостатки, система ТРН-АД вследст-вие ее простого конструктивного исполнения, нашла широкое примене-ние в связи с тем, что она позволяет обеспечить плавный пуск и тормо-жение электродвигателя, ограничить пусковой момент и токи, изменять направление скорости АД. На базе ТРН изготовляются тиристорные ре-версивные и нереверсивные контакторы для пуска, реверса и торможе-ния АД.
Одна из реальных областей применения системы ТРН-АД связана с использованием ее в ЭП насосных и вентиляторных установок.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Книга: Башенные краны
Навигация: Начало Оглавление | Другие книги | Отзывы:
§ 51. Тиристорная схема управления асинхронным электродвигателем
В связи с увеличением длины канатов крюковой подвески на кранах с большой высотой подъема возникла необходимость в плавном регулировании скорости механизма поворота, поэтому на этих кранах применяют специальные схемы электроприводов. В схеме на рис. 99 механизм поворота приводится асинхронным электродвигателем Ml с фазным ротором, управляемым с помощью тиристоров.
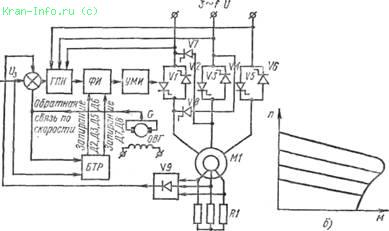
Рис. 99. Электропривод механизма поворота с тиристорным управлением:
а — функциональная электрическая схема, б — механические характеристики привода; ГПН — блок генератора пилообразного напряжения, ФИ — блок формирования импульсов, УМ И — блок усиления мощности импульсов, БТР — блок тормозного режима, ОВГ — обмотка возбуждения тахогенератора; G — тахогенератор, V9 — выпрямитель цепи обратной связи по току, U — задающее напряжение
В приводе использован параметрический способ регулирования скорости, основанный на изменении напряжения, подводимого к статору электродвигателя. Развиваемый электродвигателем вращающий момент пропорционален квадрату подводимого напряжения, поэтому изменение напряжения на зажимах электродвигателя вызывает изменение частоты вращения его ротора.
На схеме тиристоры VI — V6 включены встречно-параллельно в каждую фазу статора электродвигателя и выполняют роль быстродействующих бесконтактных переключателей. Напряжение, подводимое к электродвигателю, изменяется управлением проводимости тиристоров. Для получения жестких механических характеристик в схеме предусмотрена обратная связь по частоте вращения, выполненная с помощью тахогенератора G, и динамическое торможение асинхронного электродвигателя, которое осуществляется с помощью тиристоров V7 и V8, причем переход от двигательного режима работы электродвигателя к тормозному режиму происходит автоматически с помощью блока тормозного режима БТР.
Тиристорами управляют с помощью электронной схемы. Управляющее напряжение постоянного тока снимается с резистора с переменным сопротивлением, подается в блок генератора пилообразного напряжения ГПН и сравнивается с пилообразным напряжением синхронным и синфазным с сетью. Резистор связан с командоконтроллером, и величина его сопротивления зависит от положения рукоятки управления. При установке рукоятки управления в одно из положений вправо (влево) в результате отклонения напряжения пилообразной формы относительно напряжения управления появляется импульс, длительность которого зависит от значения напряжения управления, т. е. от положения, в которое установлена рукоятка управления. Этот импульс поступает в блок формирования импульса ФИ, в котором происходит его предварительное усиление и преобразование в импульс соответствующей формы. Преобразованный импульс поступает в блок усиления мощности импульсов У МИ, где усиливается до значений, необходимых для надежного управления тиристорами, после чего поступает на управляющие электроды тиристоров. При этом открыты и управляются тиристоры VI — V6, тиристоры V7 и V8 заперты и электродвигатель Ml работает в двигательном режиме.
В двигательном режиме работы привода напряжение управления больше напряжения обратной связи, снимаемого с тахогенератора G, и ток протекает в соответствии с полярностью напряжения управления. Момент сопротивления механизма поворота в процессе работы крана может изменяться в зависимости от ветровой нагрузки и подветренной площади обрабатываемого груза. При изменении знака момента сопротивления на валу электродвигателя система начинает ускоряться. Напряжение обратной связи становится больше напряжения управления, вследствие чего изменяется направление тока в цепи и появляются импульсы в блоке БТР. Эти импульсы поступают в блок ФИ, который запирает тиристоры V2, V3, V5, V6 и открывает тиристоры V7, V8 (тиристоры VI и V4 остаются открытыми). Электродвигатель начинает работать в режиме динамического торможения, затормаживая механизм поворота. Когда частота вращения привода уменьшится до величины, заданной управлением, напряжение обратной связи снова станет меньше напряжения управления. При этом исчезнут импульсы в блоке БТР, блок ФИ запрет тиристоры V7 и V8, откроет тиристоры V2, V3, V5, V6 и электр двигатель автоматически перейдет в двигательный режим работы.
Механические характеристики привода (рис. 99, б) обеспечивают работу механизма поворота крана с различной скоростью, величина которой зависит от положения рукоятки командоконтроллера.







