ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока широко востребованы в бытовой аппаратуре, для питания которой используется постоянное напряжение.
Существуют сложности с их запуском, которые возникают из-за того, что работа электрических машин основана на взаимодействии подвижного ротора с вращающимся электромагнитным (э/м) полем статора.
В случае постоянного напряжения питания формирование вращающегося магнитного поля невозможно без применения вспомогательных узлов и устройств, выбор которых определяет существующее разнообразие модификаций двигателей такого типа.
Разновидности двигателей постоянного тока.
Электрические машины этого типа различаются по способу получения вращающегося магнитного поля, зависящего от конструкции вспомогательного узла. В соответствие с этим все двигатели делятся на
- коллекторные;
- бесколлекторные;
- устройства с внешним возбуждением.
В первом случае для подачи питания на ламели ротора используются специальные графитовые щетки. Менять полярность подаваемого напряжения, создавая аналог вращающегося магнитного поля, удается за счет разорванной конструкции токоподающего узла (слева на рисунке).

В бесколлекторном двигателе вращающееся э/м поле формируется специальным коммутирующим узлом. Функцию последнего выполняют электронные схемы на полупроводниковых элементах, имеющие различное исполнение. Благодаря этому удается получить бесконтактное взаимодействие полей, без щеток и коллектора.
Типичный представитель такого электродвигателя – мотор-колесо, известное большинству любителей езды на малогабаритных транспортных средствах. Еще один распространенный способ запуска двигателя – включение в схему специальных обмоток возбуждения.
СПОСОБЫ ВОЗБУЖДЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Под возбуждением электродвигателей постоянного тока (ПТ) понимается эффект создания в них ЭДС, обеспечивающей вращение ротора. Их рабочие характеристики зависят от того, каким образом включена обмотка возбуждения (ОВ) по отношению к цепи якоря.
Наиболее распространены следующие схемы подключения:
- с независимым возбуждением (две обмотки не связаны одна с другой, а ОВ питается от отдельного источника);
- с параллельным возбуждением или шунтируемого типа (в них ОВ включена параллельно якорной цепочке);
- с последовательным возбуждением (ОВ включается последовательно с якорной обмоткой).
В ряде случаев, связанных с особенностями эксплуатации двигателей постоянного тока, применяется комбинированная схема включения.
Иногда ее называют «смешанной» или «компаундной» (в ней последовательное подключение совмещается с параллельным). Рассмотрим каждый из перечисленных вариантов более подробно.
При этой схеме подключения обмотка возбуждения электрически не связана с катушкой якоря (рис.1). Для снижения тепловых потерь и создания необходимой величины ЭДС число витков в ней делается достаточно большим, что позволяет снизить ток возбуждения.

Регулировать ток в якоре можно посредством резистора Rдоб, включенного последовательно. Частоту вращения можно менять резистором Rрег. Возможность независимого управления параметрами двигателя относят к плюсам этой схемы.
Ее минус – необходимость использования дополнительного источника питания, что приводит к увеличению материальных издержек. Применение схемы с независимым возбуждением определяется особенностями конструкции управляемого электропривода.
Электрическая схема подключения с параллельным возбуждением в целом напоминает рассмотренную выше. Ее особенность – наличие электрической связи ОВ с якорной цепью (рис.2).

Эффективность работы двух рассмотренных схем практически одинакова. Преимущество этого способа включения в том, что в данной ситуации отпадает необходимость в дополнительном источнике питания. Ее минус – невозможность раздельной регулировки параметров электродвигателя.
Принцип работы электродвигателя с последовательным возбуждением.
Особенностью этой схемы является последовательное включение ОВ и якорной цепочки (рис.3). При таком варианте подключения ток якоря является одновременно и током возбуждения (Iя =Iв). Это вынуждает производителей оборудования наматывать ОВ проводом того же сечения, что и у якоря.

Недостаток этой схемы – в том, что скорость двигателя зависит от нагрузки на валу. При ее увеличении падение напряжения на обмотках и магнитный поток возрастают. А это приводит к сильному падению скорости вращения. При снижении нагрузки частота вращения двигателя резко возрастает и может достичь опасных значений (он может начать работать «вразнос»).
Данный вариант применяют в случаях, когда необходимо выдерживать большое пусковое усилие (момент). Или же когда двигателю предстоит работать в режиме кратковременных перегрузок. Схемы с последовательным запуском используются в тяговых двигателях (в метро, трамваях, электровозах и троллейбусах).
Принцип действия двигателя со смешанным возбуждением.
К каждому из полюсов системы со смешанным возбуждением подключено две обмотки: последовательная и параллельная (рис.4). Их допускается включать таким образом, чтобы магнитные потоки суммировались (согласное подключение), либо вычитались один из другого (встречное включение).

В зависимости от того, как соотносятся части каждого из магнитных потоков, двигатель постоянного тока со смешанным возбуждением приближаются по своим свойствам к одному из уже рассмотренных ранее вариантов.
Такие схемы применяются в ситуациях, когда необходим большой по величине пусковой момент и одновременно невозможно обойтись без регулировки частоты вращения вала при переменных нагрузках.
БЕСКОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
Бесколлекторным называют двигатель, ток в статорных обмотках которого коммутируется особыми электронными устройствами («драйверами» или «инверторами»). Такой коммутатор состоит из набора полупроводниковых элементов, создающих вращающее поле путем подачи тока в соответствующую обмотку.
Скорость вращения вала у агрегатов этого типа значительно выше, чем у коллекторных с постоянными магнитами. Это позволяет увеличить удельную мощность двигателя и повысить его КПД.
Устройство и принцип действия.
Любой бесколлекторный двигатель состоит из следующих основных узлов:
- статор с обмотками;
- вращающийся ротор с постоянными магнитами;
- контроллер, обеспечивающий формирование в статоре вращающегося э/м поля.
На статоре бесколлекторного двигателя располагаются 3 обмотки, которые, как и у электродвигателей переменного тока называются фазными.
Допустимость такого названия объясняется следующим. Несмотря на того, что эти агрегаты работают от источника постоянного напряжения (аккумуляторов) – управляющий коммутацией обмоток контроллер включает ток поочередно.
Это приводит к формированию в них переменной составляющей в виде прямоугольных импульсов. Они и создают видимость трехфазного вращающегося э/м поля, характерного для коллекторных электродвигателей синхронного или асинхронного типа.
В зависимости от того, по какой схеме включаются обмотки статора («звезда» или «треугольник») система содержит соответственно четыре или три рабочих шины. Катушки наматываются в пазах между зубьями сердечника статора, распределяясь равномерно по фазам.
В статор нередко интегрируются датчики Холла, фиксирующие текущее положение ротора.
С их помощью удается передавать информацию контроллеру, который в каждый момент «знает», в какой точке находится ротор и подает питающий импульс на нужную обмотку. Такая возможность повышает эффективность функционирования двигателя с максимально возможной отдачей (мощностью).
© 2014-2021 г.г. Все права защищены.
Материалы сайта имеют ознакомительный характер и не могут использоваться в качестве руководящих и нормативных документов.
Схемы электродвигателей постоянного тока и их характеристики
 Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
1. с независимым возбуждением : обмотка возбуждения питается от постороннего источника постоянного тока (возбудителя или выпрямителя) ,
2. с параллельным возбуждением : обмотка возбуждения подключена параллельно обмотке якоря,
3. с последовательным возбуждением : обмотка возбуждения включена последовательно с обмоткой якоря,
4. со смешанным возбуждением : он имеет две обмотки возбуждения, одна подключена параллельно обмотке якоря, а другая — последовательно с ней.
Все эти электродвигатели имеют одинаковое устройство и отличаются лишь выполнением обмотки возбуждения. Обмотки возбуждения указанных электродвигателей выполняют так же, как у соответствующих генераторов .
Электродвигатель постоянного тока с независимым возбуждением
В этом электродвигателе (рис. 1, а) обмотка якоря подключена к основному источнику постоянного тока (сети постоянного тока, генератору или выпрямителю) с напряжением U, а обмотка возбуждения — к вспомогательному источнику в напряжением UB. В цепь обмотки возбуждения включен регулировочный реостат Rрв, а в цепь обмотки якоря — пусковой реостат Rn.
Регулировочный реостат служит для регулирования частоты вращения якоря двигателя, а пусковой — для ограничения тока в обмотке якоря при пуске. Характерной особенностью электродвигателя является то, что его ток возбуждения Iв не зависит от тока Iя в обмотке якоря (тока нагрузки). Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя Ф не зависит от нагрузки. Зависимости электромагнитного момента М и частоты вращения n от тока Iя будут линейными (рис. 2, а). Следовательно, линейной будет и механическая характеристика двигателя — зависимость п (М) (рис. 2, б).
При отсутствии в цепи якоря реостата с сопротивлением Rn скоростная и механическая характеристики будут жесткими, т. е. с малым углом наклона к горизонтальной оси, так как падение напряжения IяΣRя в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3—5 % от Uном. Эти характеристики (прямые 1 на рис. 2, а и б) называются естественными. При включении в цепь якоря реостата с сопротивлением Rn угол наклона этих характеристик возрастает, вследствие чего можно получить семейство реостатных характеристик 2, 3 и 4, соответствующих различным значениям Rn1, Rn2 и Rn3.
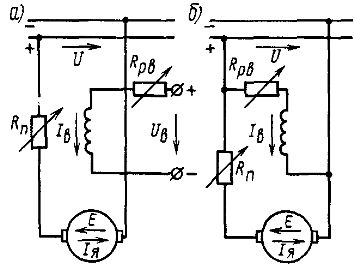
Рис. 1. Принципиальные схемы электродвигателей постоянного тока с независимым (а) и параллельным (б) возбуждением
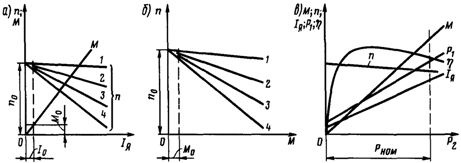
Рис. 2. Характеристики электродвигателей постоянного тока с независимым и параллельным возбуждением : а — скоростные и моментная, б — механические, в — рабочие Чем больше сопротивление Rn, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Регулировочный реостат Rpв позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. При этом будет изменяться и частота вращения n.
В цепь обмотки возбуждения никаких выключателей и предохранителей не устанавливают, так как при разрыве этой цепи резко уменьшается магнитный поток электродвигателя (в нем остается лишь поток от остаточного магнетизма) и возникает аварийный режим. Если электродвигатель работает при холостом ходе или небольшой нагрузке на валу, то частота вращения резко возрастает (двигатель идет вразнос). При этом сильно увеличивается ток в обмотке якоря Iя и может возникнуть круговой огонь. Во избежание этого защита должна отключить электродвигатель от источника питания.
Резкое увеличение частоты вращения при обрыве цепи обмотки возбуждения объясняется тем, что в этом случае резко уменьшаются магнитный поток Ф (до значения потока Фост от остаточного магнетизма) и э. д. с. Е и возрастает ток Iя. А так как приложенное напряжение U остается неизменным, то частота вращения n будет увеличиваться до тех пор, пока э. д. с. Е не достигнет значения, приблизительно равного U (что необходимо для равновесного состояния электрической цепи якоря, при котором E= U — IяΣRя.
При нагрузке на валу, близкой к номинальной, электродвигатель в случае разрыва цепи возбуждения остановится, так как электромагнитный момент, который может развить двигатель при значительном уменьшении магнитного потока, уменьшается и станет меньше нагрузочного момента на валу. В этом случае так же резко увеличивается ток Iя, и машина должна быть отключена от источника питания.
Следует отметить, что частота вращения n0 соответствует идеальному холостому ходу, когда двигатель не потребляет из сети электрической энергии и его электромагнитный момент равен нулю. В реальных условиях в режиме холостого хода двигатель потребляет из сети ток холостого хода I0, необходимый для компенсации внутренних потерь мощности, и развивает некоторый момент M0, требуемый для преодоления сил трения в машине. Поэтому в действительности частота вращения при холостом ходе меньше n0.
Зависимость частоты вращения n и электромагнитного момента М от мощности Р2 (рис. 2, в) на валу двигателя, как следует из рассмотренных соотношений, является линейной. Зависимости тока обмотки якоря Iя и мощности Р1 от Р2 также практически линейны. Ток Iя и мощность Р1 при Р2 = 0 представляют собой ток холостого хода I0 и мощность Р0, потребляемую при холостом ходе. Кривая к. п. д. имеет характер, общий для всех электрических машин.
Электродвигатель постоянного тока с параллельным возбуждением
В этом электродвигателе (см. рис. 1, б) обмотки возбуждения и якоря питаются от одного и того же источника электрической энергии с напряжением U. В цепь обмотки возбуждения включен регулировочный реостат Rpв, а в цепь обмотки якоря — пусковой реостат Rп.
В рассматриваемом электродвигателе имеет место, по существу, раздельное питание цепей обмоток якоря и возбуждения, вследствие чего ток возбуждения Iв не зависит от тока обмотки якоря Iв. Поэтому электродвигатель с параллельным возбуждением будет иметь такие же характеристики, как и двигатель с независимым возбуждением. Однако двигатель с параллельным возбуждением работает нормально только при питании от источника постоянного тока с неизменным напряжением.
При питании электродвигателя от источника с изменяющимся напряжением (генератор или управляемый выпрямитель) уменьшение питающего напряжения U вызывает соответствующее уменьшение тока возбуждения Iв и магнитного потока Ф, что приводит к увеличению тока обмотки якоря Iя. Это ограничивает возможность регулирования частоты вращения якоря путем изменения питающего напряжения U. Поэтому электродвигатели, предназначенные для питания от генератора или управляемого выпрямителя, должны иметь независимое возбуждение.
Электродвигатель постоянного тока с последовательным возбуждением
Для ограничения тока при пуске в цепь обмотки якоря включен пусковой реостат Rп (рис. 3, а), а для регулирования частоты вращения параллельно обмотке возбуждения может быть включен регулировочный реостат Rрв.
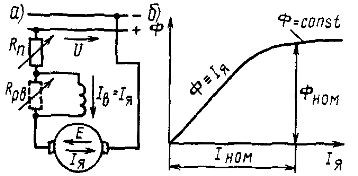
Рис. 3. Принципиальная схема электродвигателя постоянного тока с последовательным возбуждением (а) и зависимость его магнитного потока Ф от тока Iя в обмотке якоря (б)
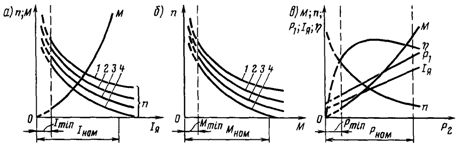
Рис. 4. Характеристики электродвигателя постоянного тока с последовательным возбуждением: а — скоростные и моментная, б — механические, в — рабочие.
Характерной особенностью этого электродвигателя является то, что его ток возбуждения Iв равен или пропорционален (при включении реостата Rpв) току обмотки якоря Iя, поэтому магнитный поток Ф зависит от нагрузки двигателя (рис. 3, б).
При токе обмотки якоря Iя, меньшем (0,8—0,9) номинального тока Iном магнитная система машины не насыщена и можно считать, что магнитный поток Ф изменяется прямо пропорционально току Iя. Поэтому скоростная характеристика электродвигателя будет мягкая — с увеличением тока Iя частота вращения n будет резко уменьшаться (рис. 4, а). Уменьшение частоты вращения n, происходит из-за увеличения падения напряжения IяΣRя. во внутреннем сопротивлении Rя. цепи обмотки якоря, а также из-за увеличения магнитного потока Ф.
Электромагнитный момент М при увеличении тока Iя будет резко возрастать, так как в этом случае увеличивается и магнитный поток Ф, т. е. момент М будет пропорционален току Iя. Поэтому при токе Iя, меньшем (0,8 Н- 0,9) Iном, скоростная характеристика имеет форму гиперболы, а моментная — параболы.
При токах Iя > Iном зависимости М и п от Iя линейны, так как в этом режиме магнитная цепь будет насыщена и магнитный поток Ф при изменении тока Iя меняться не будет.
Механическая характеристика, т. е. зависимость n от М (рис. 4, б), может быть построена на основании зависимостей n и М от Iя. Кроме естественной характеристики 1, можно путем включения в цепь обмотки якоря реостата с сопротивлением Rп получить семейство реостатных характеристик 2, 3 и 4. Эти характеристики соответствуют различным значениям Rn1, Rn2 и Rn3, при этом чем больше Rn, тем ниже располагается характеристика.
Механическая характеристика рассматриваемого двигателя мягкая и имеет гиперболический характер. При малых нагрузках магнитный поток Ф сильно уменьшается, частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.).
Обычно минимально допустимая нагрузка для двигателей большой и средней мощности составляет (0,2 …. 0,25) Iном. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой), применение ременной передачи или фрикционной муфты недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют, особенно там, где имеют место изменения нагрузочного момента в широких пределах и тяжелые условия пуска: во всех тяговых приводах (электровозы, тепловозы, электропоезда, электрокары, электропогрузчики и пр.), а также в приводах грузоподъемных механизмов (краны, лифты и пр.).
Объясняется это тем, что при мягкой характеристике увеличение нагрузочного момента приводит к меньшему возрастанию тока и потребляемой мощности, чем у двигателей с независимым и параллельным возбуждением, поэтому двигатели с последовательным возбуждением лучше переносят перегрузки. Кроме того, эти двигатели имеют большой пусковой момент, чем двигатели с параллельным и независимым возбуждением, так как при увеличении тока обмотки якоря при пуске соответственно увеличивается и магнитный поток.
Если принять, например, что кратковременный пусковой ток может в 2 раза превышать номинальный рабочий ток машины, и пренебречь влиянием насыщения, реакцией якоря и падением напряжения в цепи его обмотки, то в двигателе с последовательным возбуждением пусковой момент будет в 4 раза больше номинального (в 2 раза увеличиваются и ток, и магнитный поток), а в двигателях с независимым и параллельным возбуждением — только в 2 раза больше.
В действительности из-за насыщения магнитной цепи магнитный поток не увеличивается пропорционально току, но все же пусковой момент двигателя с последовательным возбуждением при прочих равных условиях будет значительно больше пускового момента такого же двигателя с независимым или параллельным возбуждением.
Зависимости n и М от мощности Р2 на валу электродвигателя (рис. 4, в), как следует из рассмотренных выше положений, являются нелинейными, зависимости P1, Iя и η от Р2 имеют такую же форму, как и у двигателей с параллельным возбуждением.
Электродвигатель постоянного тока со смешанным возбуждением
В этом электродвигателе (рис. 5, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной (или независимой) и последовательной, по которым проходят токи возбуждения Iв1 и Iв2 = Iя

где Фпосл — магнитный поток последовательной обмотки, зависящий от тока Iя, Фпар — магнитный поток параллельной обмотки, который не зависит от нагрузки (определяется током возбуждения Iв1).
Механическая характеристика электродвигателя со смешанным возбуждением (рис. 5, б) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения магнитодвижущих сил параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (кривая 3 при малой м. д. с. последовательной обмотки) или к характеристике 2 (кривая 4 при малой м. д. с. параллельной обмотки).
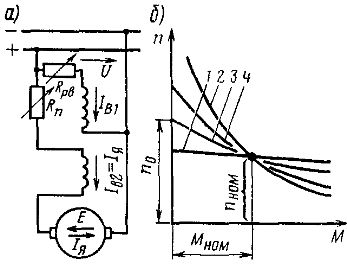
Рис. 5. Принципиальная схема электродвигателя со смешанным возбуждением (а) и его механические характеристики (б)
Достоинством двигателя постоянного тока со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, когда Фпосл=0. В этом режиме частота вращения его якоря определяется магнитным потоком Фпар и имеет ограниченное значение (двигатель не идет вразнос).







