- Структурная схема передаточные функции асинхронного двигателя как элемента суэп
- Принцип действия АИД.
- Расчетная схема и дифференциальные уравнения
- Уравнения состояния и структурная схема асинхронного электродвигателя
- Передаточная функция асинхронного электродвигателя
- Передаточная функция АД при частотном регулировании
- 9.5. Вращающий (электромагнитный) момент асинхронного электродвигателя
- Режимы работы асинхронных машин
- Двигательный режим
- Рекуперативное торможение
- Регулирование частоты вращения АД
- Способ изменения частоты питающего напряжения
- Способ переключения числа пар полюсов
- Способ изменения величины скольжения
Структурная схема передаточные функции асинхронного двигателя как элемента суэп
Асинхронные электродвигатели для мехатронных систем
В мехатронных системах нашли применение регулируемые асинхронные электроприводы с управлением по напряжению и частоте питания. Концепция векторного управления позволяет получать микропроцессорные асинхронные электроприводы с характеристиками близкими к характеристикам электроприводом постоянного тока.
Актуальность приминения асинхронных электроприводов обусловлена:
— экономическими факторами: минимум стоимости, отсутствие дефицитных видов материалов, повышенный, по сравнению с приводами постоянного тока, коэффициент полезного действия;
— повышенная удельная мощность высокочастотных (200 — 1000Гц) асинхронных электродвигателей;
— меньший момент инерции ротора по сравнению с синхронными электродвигателями;
— больший, по сравнению с двигателями постоянного тока, срок службы и надежность.
В системах автоматического регулирования применяют и двух- и трехфазные асинхронные электродвигатели (АД). Трехфазные АД относятся к двигателям общепромышленного применения, двухфазные АД — это специальные двигатели, получившие название асинхронных исполнительных двигателей (АИД). В мехатронных системах наибольшее распространение получили АИД с полым немагнитным ротором в виде тонкостенного стакана из сплавов алюминия. Толщина стенки стакана ротора в зависимости от мощности электродвигателя колеблется в пределах 0,1 – 1мм. Полый ротор имеет малую массу, а, следовательно, незначительный момент инерции.
Недостатком АИД с полым немагнитным ротором является большой немагнитный зазор, состоящий из двух воздушных зазоров и толщины немагнитного стакана, вследствие чего эти электродвигатели имеют значительный ток намагничивания (до 80 — 90% от номинального тока) и соответственно низкий коэффициент мощности. Большой намагничивающий ток приводит к повышенным электрическим потерям и значительно снижает КПД электродвигателя.
АИД с ротором типа «беличье колесо» имеют такую же конструкцию, как трехфазные АД.
Принцип действия АИД.
Электромагнитный момент создается в результате взаимодействия вращающегося магнитного поля статора с токами, наведенными этим полем в обмотке ротора. Известно, что вектор вращающего магнитного поля является круговым при соблюдении следующих условий:
— сдвиг обмоток статора в пространстве для трехфазных машин на угол 2 p /3, а для двухфазных на угол p /2;
— сдвиг токов фаз обмотки статора во времени для трехфазных машин на угол 2 p /3 , а для двухфазных на угол p /2;
— равенство магнитодвижущих сил всех фаз между собой.
Нарушение любого из этих условий приводит к тому, что поле становится эллиптическим. Эллиптическое поле можно представить как сумму двух неравных круговых полей, вращающихся с синхронной угловой скоростью в противоположных направлениях. Круговое поле, определяющее направление вращения эллиптического поля, называют прямовращающимся, а круговое поле, вращающееся в противоположном направлении, называют обратновращающимся. Прямое поле создает вращающий момент двигателя, а обратное поле тормозной момент. При увеличении разности значений МДС фаз уменьшается результирующий вращающий момент двигателя, что при неизменном моменте нагрузки приводит к снижению частоты вращения двигателя.
Расчетная схема и дифференциальные уравнения
Двухфазные электродвигатели принято описывать системой дифференциальных уравнений в неподвижной системе координат a с b с. Расчетная схема АД представлена на рис. 9.1.

Система дифференциальных уравнении имеет вид:
 ;
;
r – активное сопротивление обмотки, Y — потокосцепление.
ЭДС вращения, вводимые в уравнения обмоток ротора, определяются как:

W — скорость вращения ротора, p п – число пар полюсов, w 1 — частота питающего напряжения.
Потокосцепления обмоток машины:

где L 1, L 2 — коэффициенты самоиндукции обмоток статора и ротора, Lm — коэффициент взаимоиндукции между контурами статора и ротора при совпадении их осей.
Уравнение равновесия моментов

s — коэффициент проскальзывания вектора скорости вращения ротора относительно вектора вращающегося магнитного поля.
При записи через потокосцепления и токи электромагнитный момент для трехфазного АД

Уравнения состояния и структурная схема асинхронного электродвигателя
Систему уравнений АД представим записанной в форме Коши, одновременно заменяя токи обмоток через функции потокосцеплений.

Или, подставляя выражения для токов, получаем:

Подставляем полученные значения токов и момента в уравнения и, обозначая D 1 = L 1 L 2— L 2 m , получаем:

Последние уравнения можно рассматривать как уравнения состояния АД. В качестве переменных состояния здесь выступают проекции потокосцеплений на ортогональные оси и угловая частота вращения ротора. Внешними воздействиями на двигатель являются напряжения статора и момент сил сопротивления.
Эти уравнения нелинейны (содержат произведения переменных состояния) и решения в общем виде не имеют. Переходные процессы АД обычно исследуют моделированием на ЭВМ.
Передаточная функция асинхронного электродвигателя
Структурную схему АД можно построить, если перейти от системы дифференциальных к операторным уравнениям.
Рассмотрим динамику работы АД при управлении напряжением, подаваемом на обмотку статора. Электромагнитными переходными процессами пренебрегаем и рассматриваем только электромеханический процесс. В общем виде момент вращения электродвигателя является функцией частоты вращения и напряжения на зажимах обмотки статора, а статический момент сопротивления зависит от частоты вращения.
Изменение напряжения, подаваемого на обмотку статора, на D U вызывает соответствующие изменения моментов и частоты вращения:
При единичном сигнале D U ( p ) = U ( p ), D W ( p ) = W (р). Передаточная функция АД при управлении напряжением, подаваемом на обмотку статора, имеет вид:

W ( p ) = W (р)/ U ( p ) = k дв / ( T эм p + l ).
Следует иметь в виду, что k дв и Тэм переменные параметры, значения которых зависят от точки на механической характеристике, около которой происходит регулирование.
Передаточная функция АД при частотном регулировании
Получить точное выражение передаточной функции АД, отражающей электромагнитные и механические переходные процессы при частотном регулировании, не представляется возможным, потому что имеют место существенные нелинейности, связанные с преобразованием управляющего сигнала в частоту напряжения, питающего электродвигатель.
Вопрос осложняется также наличием двух контуров регулирования по двум взаимосвязанным входам — амплитуде и частоте напряжения. Поэтому для электроприводов с частотным управлением особое значение имеют методы моделирования на ЭВМ.
При малых изменениях частоты напряжения D w 1 будет изменяться только активная составляющая тока ротора, реактивной составляющей пренебрегают. Пренебрегают величинами второго порядка малости. Таким образом, исследуется вращение ротора в магнитном поле постоянной амплитуды, вращающемся с заданной частотой при скачкообразном изменении частоты питающего напряжения. Передаточная функция при принятых условиях:

9.5. Вращающий (электромагнитный) момент асинхронного электродвигателя
Рассмотрим энергетическую диаграмму трехфазного АД.

В диаграмме приняты следующие обозначения:
P 1 — активная мощность, потребляемая двигателем из сети,
P эл1, P эл2 — электрические потери в обмотках статора и ротора,
P эм — электромагнитная мощность, передаваемая электромагнитным путем ротору,
P мх — полная механическая мощность,
P мех, Рдоб — механические и добавочные потери,
P 2 — полезная мощность на валу.
Пусковые характеристики АД, представлены на рисунке.

Максимальному значению момента вращения соответствует некоторое скольжение s кр, называемое критическим. Значение критического скольжения во многом определяется величиной омического сопротивления обмотки ротора.
Асинхронные электродвигатели различных серий имеют широкий диапазон варьирования параметров пусковых характеристик:
Меняя омическое сопротивление роторной обмотки r , изменяем характер кривой момента:

Форма кривой момента вращения зависит также от формы пазов ротора:

1 — с пазами бутылочной формы, 2 — глубокопазный ротор, 3 — ротор с двойной беличьей клеткой
Режимы работы асинхронных машин
Направление вращения асинхронного электродвигателя при прямом порядке чередования фаз (а— b —с) принимаем за положительное (первый квадрант), а при обратном порядке чередования фаз ( a — c — b ) — за отрицательное (третий квадрант). Во втором и четвертом квадрантах представлены характеристики тормозных режимов.
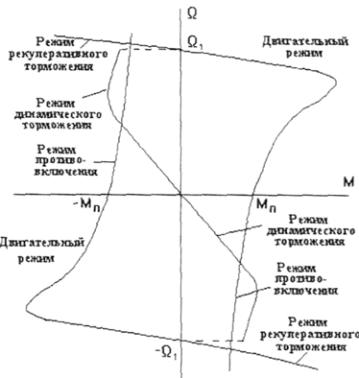
Двигательный режим
Двигательный режим характеризуется изменением частоты вращения электродвигателя от нуля (точка пуска) до W 1 (точка идеального холостого хода) при соответствующем изменении момента (тока) от Мпуск ( I пуск) до нуля.
Устойчивый режим работы обеспечивается частью механической характеристики АД лежащей в диапазоне изменения скольжения от нуля до s kp .
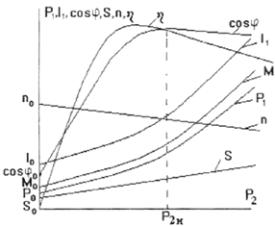
Рабочие характеристики асинхронного электродвигателя строят в функции полезной мощности электродвигателя Р2.
Рекуперативное торможение
Рекуперативное торможение (генераторный режим) с отдачей энергии в сеть имеет место тогда, когда под влиянием нагрузочного момента или другой причины угловая частота вращения ротора асинхронной машины превысит синхронную частоту W 1 . В генераторном режиме скольжение s s > l . Двигатель потребляет из сети активную мощность, в то же время потребляется механическая мощность вращающегося ротора. Обе эти мощности преобразуются в потери, так как полезная мощность равна нулю. Ротор энергично тормозится. Если в момент, когда s =1, фазы обмотки статора не будут отключены от сети, то ротор будет разгоняться в противоположном исходному направлению вращения и произойдет реверс двигателя.
Регулирование частоты вращения АД
Рассмотрим основную зависимость для частоты вращения ротора АД

Очевидны три возможных способа регулирования частоты вращения:
· изменением частоты питающего напряжения;
· изменением числа пар полюсов машины;
· изменением значения скольжения.
Способ изменения частоты питающего напряжения
Этот способ является основным способом регулирования. С широким распространением дешевых микропроцессоров и появление мощных транзисторов ( MOSFET и IGBT ) создались условия, позволяющие достаточно простыми средствами формировать напряжение желаемой формы, подводимое к обмоткам статора АД. Наиболее часто используются метод ШИМ. При таком способе можно реализовать привод с диапазоном регулирования скорости 500 и более при номинальном моменте.
Способ переключения числа пар полюсов
Для реализации этого способа предусматривается в обмотке статора переключение секций фаз из последовательного соединения в параллельное и наоборот. Существуют АД с несколькими обмотками статора, имеющими различное число пар полюсов. Этот способ является наиболее простым, однако частота вращения изменяется дискретно. В мехатронных системах этот способ не применяется.
Способ изменения величины скольжения
Величина момента вращения трехфазных АД зависит от квадрата приложенного напряжения. Меняя величину напряжения, подаваемого на фазы статора АД, например, с помощью трехфазного МУ или тиристорно го преобразователя для двигателя, работающего под нагрузкой, например Mст1, смещаем точку установившегося режима в диапазоне s h — sкр. В настоящее время существует большое число различных схем включения тиристоров, позволяющих коммутировать статорные цепи АД и регулировать подводимое к двигателю напряжение.
Учитывая, что в асинхронных электродвигателях s к max =0.15, этот способ дает небольшой диапазон регулирования частоты вращения ротора. Кроме того, при тиристорном регулировании напряжения по мере увеличения угла управления тиристоров напряжение статора принимает импульсный характер, возникают высшие гармонические напряжения и тока, в свою очередь вызывающие повышенные тепловые и магнитные потери, а также высшие гармонические момента вращения, являющиеся тормозными по отношению к основной частоте.







