ЭЛЕКТРОПРИВОД И СХЕМА УПРАВЛЕНИЯ ТОКАРНО — ВИНТОРЕЗНОГО СТАНКА
Читайте также:
E) схема данных.
F. Область управления временем
FDDI. Кадр. Процедуры управления доступом к кольцу и инициализации работы кольца.
I.Формы государственного управления
II. ЕДИНСТВЕННО ПРАВИЛЬНЫЙ СПОСОБ УПРАВЛЕНИЯ ПЕРСОНАЛОМ
VI. Педагогические технологии на основе эффективности управления и организации учебного процесса
Автоматизированная система управления подстанцией
АВТОМАТИЗИРОВАННОЕ УПРАВЛЕНИЕ ЭЛЕКТРОПРИВОДА-МИ КОНВЕЙЕРОВ
Автоматизированные системы управления в здравоохранении (клиничекий, городсокй. Областной, уровни управления.
Автоматизированные системы управления производственной деятельностью аэропорта
Главный привод и привод подачи большинства малых и средних токарных станков осуществляют от односкоростного асинхронного двигателя в сочетании с коробками скоростей и подач. Применяют двигатель постоянного тока, который в сочетании с коробкой скоростей осуществляет регулирование скорости.
В механических цехах машиностроительных заводов нашли широкое приме-нение, токарно-винторезные станки модели 1К62, которые используются в усло-виях индивидуального и мелкосерийного производства. Станок модели 1К62, общий вид которого показан на рис. 7-1, имеет следующие технические данные: 1) наибольший диаметр изделия, установленного над станиной, 400мм; 2) наиболь-ший диаметр обрабатываемого прутка 45мм; 3) расстояние между центрами 1000мм;4) число ступеней частоты вращения шпинделя 23 (от 12,5 до 2000 об/мин).
Привод шпинделя и рабочей подачи суппорта осуществлён от асинхронного короткозамкнутого двигателя мощностью 10кВт при 145рад/с. Регулирование угловой скорости шпинделя производится переключением шестерён коробки скоростей с помощью рукояток, изменение продольной и поперечной подач суппорта — переклю-чением шестерён коробки подач также посредством соответствующих рукояток. Для быстрых перемещений суппорта служит отдельный асинхронный двигатель мощность1,0 кВт при 141 рад/с. Включение и выключение шпинделя станка, а также его реверсирование производился с помощью многодисковой фрикционной муфты, которая управляется двумя рукоятками. Включение механической подачи суппорта
в любом направлении производится одной рукояткой.
На рис.7-5 представлена электрическая схема станка 1К62. Кроме главного двигателя Д1 и двигателя быстрых ходов Д4 на схеме показаны: двигатель насоса ох-лаждения Д2 и двигатель гидроагрегата ДЗ, присоединяемый через электрический разъединитель (штепсельный разъем) ШР в случае применения на станке гидро-копировального устройства.
Напряжение на станок подается включением пакетного выключателя ВП1. Цепи управления получают питание через разделительный трансорматор Тр с вторичным напряжением 11ОВ, что повышает надёжность работы аппаратов уп-равления. Такое питание цепей управления характерно вообще для большинства электросхем металлорежущих станков.
Пуск двигателя Д1 производится нажатием кнопки КнП, при этом включается контактор КГ и главными контактами присоединяет статор двигателя к сети, а вспо-могательным контактом шунтирует пусковую кнопку. Одновременно пускаются двигатели насоса охлаждения — (если включён пакетный выключатель ВП2) и гидроагрегата. Включение шпинделя производится поворотом вверх рукоятки управ-ления фрикционной муфтой. При повороте этой рукоятки и среднее положение шпиндель станка отключается; одновременно нажимается путевой переключатель В11 и включается пневматическое реле времени РВ. Если пауза в работе превышает 3-8 мин, то контакт реле РВ размыкается н контактор КГ теряет питание. Главный двигатель отключается от сети и останавливается, что ограничивает его работу вхо-лостую с низким значением cos ф и уменьшает потери энергии. Если пауза мала, то реле РВ не успевает сработать и отключение двигателя шпинделя не произойдет.
Для управления быстрым перемещением суппорта служит рукоятка на фартуке станка. При повороте этой рукоятки она нажимает на переключатель ВБХ, его контакт замыкает цепь катушки контактора КБХ, который включает двигатель Д4. Возврат рукоятки в среднее положение отключает двигателя Д4.
Станок имеет местное освещение.Питание лампы ЛМО производится напря-жением 36В от отдельной обмотки трансформатора Тр. В цепи лампы находятся предохранитель Пр4 и выключатель ВО. Иногда один из выводов обмотки транс-форматора низкого напряжения Тр присоединяют к газовой трубе, в которой про-ложен второй провод, питающий лампу. В качестве одного из проводов вторичной цепи местного освещения при напряжениях 12 и 36 В используют станину станка.
Схемой управления предусмотрены: защита двигателей Д1-ДЗ от длительных перегрузок тепловыми реле РТГ, РТО и РТГП; от к.з, соответствующими плавкими предохранителями. При кратковременных перегрузках, возникающих на шпинделе, происходит проскальзывание фрикционной муфты и приводной двигатель отсо-единяется от входного вала коробки скоростей станка. Для быстрой остановки шпин-деля станка установлен в передней бабке механический тормоз.
Дата добавления: 2014-11-13 ; просмотров: 298 ; Нарушение авторских прав
Три наиболее популярные схемы управления асинхронным двигателем
Все электрические принципиальные схемы станков, установок и машин содержат определенный набор типовых блоков и узлов, которые комбинируются между собой определенным образом. В релейно-контакторных схемах главными элементами управления двигателями являются электромагнитные пускатели и реле.
Наиболее часто в качестве привода в станках и установках применяются трехфазные асинхронные двигатели с короткозамкнутым ротором. Эти двигатели просты в устройстве, обслуживании и ремонте. Они удовлетворяют большинству требований к электроприводу станков. Главными недостатками асинхронных двигателей с короткозамкнутым ротором являются большие пусковые токи (в 5-7 раз больше номинального) и невозможность простыми методами плавно изменять скорость вращения двигателей.
С появлением и активным внедрением в схемы электроустановок преобразователей частоты такие двигатели начали активно вытеснять другие типы двигателей (асинхронные с фазным ротором и двигатели постоянного тока) из электроприводов, где требовалось ограничивать пусковые токи и плавно регулировать скорость вращения в процессе работы.
Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается. В самом простом варианте для включения можно использовать трехфазный рубильник или пакетный выключатель. Но эти аппараты при своей простоте и надежности являются аппаратами ручного управления.
В схемах же станков и установок часто должна быть предусмотрена работа того или иного двигателя в автоматическом цикле, обеспечиваться очередность включения нескольких двигателей, автоматическое изменение направления вращения ротора двигателя (реверс) и т.д.
Обеспечить все эти функции с аппаратами ручного управления невозможно, хотя в ряде старых металлорежущих станков тот же реверс и переключение числа пар полюсов для изменения скорости вращения ротора двигателя очень часто выполняется с помощью пакетных переключателей. Рубильники и пакетные выключатели в схемах часто используются как вводные устройства, подающие напряжение на схему станка. Все же операции управления двигателями выполняются электромагнитными пускателями.
Включение двигателя через электромагнитный пускатель обеспечивает кроме всех удобств при управлении еще и нулевую защиту. Что это такое будет рассказано ниже.
Наиболее часто в станках, установках и машинах применяются три электрические схемы:
схема управления нереверсивным двигателем с использованием одного электромагнитного пускателя и двух кнопок «пуск» и «стоп»,
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок.
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок, в двух из которых используются спаренные контакты.
Разберем принцип работы всех этих схем.
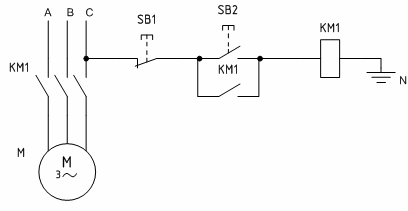
1. Схема управления двигателем с помощью магнитного пускателя
Схема показана на рисунке.
При нажатии на кнопку SB2 «Пуск» на катушка пускателя попадает под напряжение 220 В, т.к. она оказывается включенной между фазой С и нулем ( N) . Подвижная часть пускателя притягивается к неподвижной, замыкая при этом свои контакты. Силовые контакты пускателя подают напряжение на двигатель, а блокировочный замыкается параллельно кнопке «Пуск». Благодаря этому при отпускании кнопки катушка пускателя не теряет питание, т.к. ток в этом случае идет через блокировочный контакт.
Если бы блокировочный контакт не был бы подключен параллельно кнопки (по какой-либо причине отсутствовал), то при отпускании кнопки «Пуск» катушка теряет питание и силовые контакты пускателя размыкаются в цепи двигателя, после чего он отключается. Такой режим работы называют «толчковым». Применяется он в некоторых установках, например в схемах кран-балок.
Остановка работающего двигателя после запуска в схеме с блокировочным контактом выполняется с помощью кнопки SB1 «Стоп». При этом, кнопка создает разрыв в цепи, магнитный пускатель теряет питание и своими силовыми контактами отключает двигатель от питающей сети.
В случае исчезновения напряжения по какой-либо причине магнитный пускатель также отключается, т.к. это равносильно нажатию на кнопку «Стоп» и созданию разрыва цепи. Двигатель останавливается и повторный запуск его при наличии напряжения возможен только при нажатии на кнопку SB2 «Пуск». Таким образом, магнитный пускатель обеспечивает т.н. «нулевую защиту». Если бы он в цепи отсутствовал и двигатель управлялся рубильником или пакетным выключателем, то при возврате напряжения двигатель запускался бы автоматически, что несет серьезную опасность для обслуживающего персонала. Подробнее смотрите здесь — защита минимального напряжения.
Анимация процессов, протекающих в схеме показана ниже.
2. Схема управления реверсивным двигателем с помощью двух магнитных пускателей
Схема работает аналогично предыдущей. Изменение направления вращения (реверс) ротор двигателя меняет при изменении порядка чередования фаз на его статоре. При включении пускателя КМ1 на двигатель приходят фазы — A , B , С, а при включении пускателя KM2 — порядок фаз меняется на С, B , A.
Схема показана на рис. 2.
Включение двигателя на вращение в одну сторону осуществляется кнопкой SB2 и электромагнитным пускателем KM1 . При необходимости смены направления вращения необходимо нажать на кнопку SB1 «Стоп», двигатель остановится и после этого при нажатии на кнопку SB 3 двигатель начинает вращаться в другую сторону. В этой схеме для смены направления вращения ротора необходимо промежуточное нажатие на кнопку «Стоп».
Кроме этого, в схеме обязательно использование в цепях каждого из пускателей нормально-закрытых (размыкающих) контактов для обеспечения защиты от одновременного нажатия двух кнопок «Пуск» SB2 — SB 3, что приведет к короткому замыканию в цепях питания двигателя. Дополнительные контакты в цепях пускателей не дают пускателям включится одновременно, т.к. какой-либо из пускателей при нажатии на обе кнопки «Пуск» включиться на секунду раньше и разомкнет свой контакт в цепи другого пускателя.
Необходимость в создании такой блокировки требует использования пускателей с большим количеством контактов или пускателей с контактными приставками, что удорожает и усложняет электрическую схему.
Анимация процессов, протекающих в схеме с двумя пускателями показана ниже.
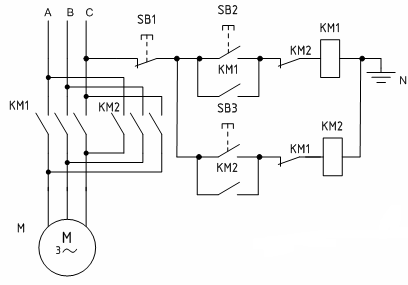
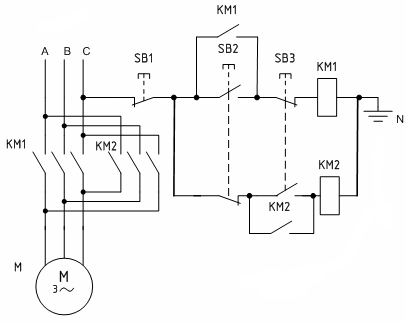
3. Схема управления реверсивным двигателем с помощью двух магнитных пускателей и трех кнопок (две из которых имеют контакты с механической связью)
Схема показана на рисунке.
Отличие этой схемы от предыдущей в том, что в цепи каждого пускателя кроме общей кнопки SB1 «Стоп»включены по 2 контакта кнопок SB2 и SB 3, причем в цепи КМ1 кнопка SB2 имеет нормально-открытый контакт (замыкающий), а SB 3 — нормально-закрытый (размыкающий) контакт, в цепи КМ3 — кнопка SB2 имеет нормально-закрытый контакт (размыкающий), а SB 3 — нормально-открытый. При нажатии каждой из кнопок цепь одного из пускателей замыкается, а цепь другого одновременно при этом размыкается.
Такое использование кнопок позволяет отказаться от использования дополнительных контактов для защиты от одновременного включения двух пускателей (такой режим при этой схеме невозможен) и дает возможность выполнять реверс без промежуточного нажатия на кнопку «Стоп», что очень удобно. Кнопка «Стоп» нужна для окончательной остановки двигателя.
Приведенные в статье схемы являются упрощенными. В них отсутствуют аппараты защиты (автоматические выключатели, тепловые реле), элементы сигнализации. Такие схемы также часто дополняются различными контактами реле, выключателей, переключателей и датчиков. Также возможно питание катушки электромагнитного пускателя напряжение 380 В. В этом случае он подключается от двух любых фаз, например, от А и B . Возможно использование понижающего трансформатора для понижения напряжения в схеме управления. В этом случае используются электромагнитные пускатели с катушками на напряжение 110, 48, 36 или 24 В.
Схемы управления электродвигателями
Подписка на рассылку
Современное оборудование часто работает в автоматическом и полуавтоматическом режиме. Это позволяет исключить пресловутый человеческий фактор, увеличить объемы и темпы производимых операций, сделать производство более рентабельным. Одним из главных факторов надежной работы современного оборудования является безупречное выполнение включения электродвигателей, которое выполняется в заданной последовательности и с соблюдением штатного режима работы. Схемы управления электродвигателями могут быть различны, так как принципы автоматического и полуавтоматического режима работы могут существенно отличаться друг от друга.
Полуавтоматическое управление предусматривает участие оператора, который инициирует пуск оборудования нажатием соответственной кнопки или поворачивая рычаг. После этого функция персонала заключается лишь в контроле рабочего процесса. При автоматическом управлении первоначальный пуск оборудования осуществляют реле или датчики, после чего работы выполняется в соответствие с заданными программами. Такое программное устройство часто выполняется с помощью логических схем, вариантов которых может быть довольно много. В промышленности наиболее часто встречаются следующие схемы управления асинхронными электродвигателями:
• нереверсивного управления; • реверсивного управления с двумя магнитными пускателями.
Основные схемы управления асинхронным электродвигателем
При использовании схемы управления электродвигателем с нереверсивным управлением после пуска происходит подключение к сети электромагнитной катушки. С ее сердечником соприкасается подвижный якорь и замыкает силовые контакты. В результате на двигатель подается трехфазное напряжение. Параллельно с силовыми контактами замыкаются блокировочные, что позволяет зашунтировать кнопку пуска и отпустить ее. Нажимая кнопку стоп, оператор тем самым разрывает цепь, от которой запитана электромагнитная катушка. Это освобождает якорь, который при падении размыкает силовые контакты, что приводит к остановке оборудования. В этой схеме управления защита от длительной перегрузки обеспечивается подключением к двум фазам тепловых реле.
Схема управления реверсивным электродвигателем имеет два магнитных пускателя. Один из них соединяет схему включения на прямое вращение, а второй – на обратное включение. Кнопками «вперед» и «назад» подключаются те электромагнитные катушки, которые отвечают за соответствующую операцию. Реверсивные пускатели состоят из двух нереверсивных пускателей, имеют механическую блокировку, исключающую одновременное включение. Остановка двигателя включена в общую цепь управления.
Схемы управления электродвигателями постоянного тока и синхронными двигателями
Схема управления электродвигателем постоянного тока может быть следующих видов:
• с нижним расположением ключа; • с верхним расположением ключа; • мостовая схема.
Все они базируются на принципах ШИМ и основных характеристиках двигателя. Наиболее экономичной схемой является с нижним расположением ключа, его верхнее расположение используют при повышенных требованиях к безопасности. Мостовая схема используется при реверсивном управлении двигателем.
Синхронные двигатели сложнее асинхронных, но они менее чувствительны к колебаниям напряжения и более устойчивы к перегрузкам. Это стало причиной их широкого распространения. Схема управления синхронным электродвигателем обычно включается в себя тиристорные возбудители, которые заменили электромашинные возбудители, долгое время являвшиеся уязвимым местом этого типа электромоторов.


 Современное оборудование часто работает в автоматическом и полуавтоматическом режиме. Это позволяет исключить пресловутый человеческий фактор, увеличить объемы и темпы производимых операций, сделать производство более рентабельным. Одним из главных факторов надежной работы современного оборудования является безупречное выполнение включения электродвигателей, которое выполняется в заданной последовательности и с соблюдением штатного режима работы. Схемы управления электродвигателями могут быть различны, так как принципы автоматического и полуавтоматического режима работы могут существенно отличаться друг от друга.
Современное оборудование часто работает в автоматическом и полуавтоматическом режиме. Это позволяет исключить пресловутый человеческий фактор, увеличить объемы и темпы производимых операций, сделать производство более рентабельным. Одним из главных факторов надежной работы современного оборудования является безупречное выполнение включения электродвигателей, которое выполняется в заданной последовательности и с соблюдением штатного режима работы. Схемы управления электродвигателями могут быть различны, так как принципы автоматического и полуавтоматического режима работы могут существенно отличаться друг от друга.






