Система генератор — двигатель постоянного тока
 В различных станках часто требуется бесступенчатое регулирование частоты вращения привода в пределах более широких, чем те, которые может обеспечить регулирование посредством изменения магнитного потока двигателя постоянного тока с параллельным возбуждением. В этих случаях применяют более сложные системы электропривода.
В различных станках часто требуется бесступенчатое регулирование частоты вращения привода в пределах более широких, чем те, которые может обеспечить регулирование посредством изменения магнитного потока двигателя постоянного тока с параллельным возбуждением. В этих случаях применяют более сложные системы электропривода.
На рис. 1 представлена схема регулируемого электропривода по системе генератор — двигатель (сокращенно Г — Д). В этой системе асинхронный двигатель АД непрерывно вращает генератор Г постоянного тока с независимым возбуждением и возбудитель В, представляющий собой маломощный генератор постоянного тока с параллельным возбуждением.
Двигатель постоянного тока Д приводит в движение рабочий орган станка. Обмотки возбуждения ОВГ генератора и ОВД двигателя питаются от возбудителя В. Изменяя реостатом 1 сопротивление цепи возбуждения генератора Г, меняют напряжение, подводимое к якорю двигателя Д, и тем самым регулируют частоту вращения двигателя. Двигатель при этом работает с полным и неизменным потоком, так как реостат 2 выведен.
При изменении напряжения U меняется частота вращения n 0 идеального холостого хода двигателя Д. Так как поток двигателя и сопротивление цепи его якоря не меняются, то угловой коэффициент b остается постоянным. Поэтому прямолинейные механические характеристики, соответствующие разным значениям U, расположены одна под другой и параллельны друг другу (рис. 2).
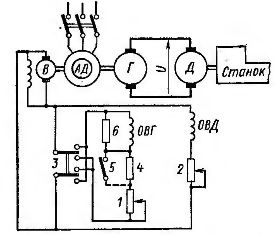
Рис. 1. Система генератор — двигатель постоянного тока (дпт)
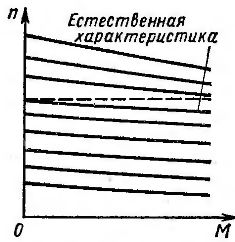
Рис. 2. Механические характеристики системы генератор — двигатель постоянного тока
Они имеют больший наклон, чем характеристики такого же электродвигателя, питаемого от сети постоянного тока, так как в системе Г — Д напряжение U при неизменном токе возбуждения генератора с увеличением нагрузки снижается согласно зависимости:
где Ег и r г— соответственно э. д. с. и внутреннее сопротивление генератора.
По аналогии с асинхронными двигателями обозначим
Эта величина характеризует уменьшение частоты вращения двигателя при повышении нагрузки от нуля до номинальной. Для параллельных механических характеристик
Эта величина возрастает по мере уменьшения n0. При больших значениях sн заданные режимы резания будут значительно изменяться при случайных колебаниях нагрузки. Поэтому диапазон регулирования напряжением обычно не превышает 5:1.
С уменьшением номинальной мощности двигателей падение напряжения в них увеличивается, и механические характеристики получают больший наклон. По этой причине снижают диапазон регулирования напряжением системы Г — Д по мере уменьшения мощности (при мощностях менее 1 кВт до 3:1 или 2:1).
С уменьшением магнитного потока генератора на его напряжении в большей степени сказывается размагничивающее действие реакции его якоря. Поэтому характеристики, относящиеся к низким частотам вращения двигателя, фактически имеют больший наклон, чем механические характеристики.
Расширение диапазона регулирования достигается уменьшением магнитного потока двигателя Д посредством реостата 2 (см. рис. 1), производимым при полном потоке генератора Этому способу регулирования скорости соответствуют характеристики, расположенные выше естественной (см. рис. 2).
Общий диапазон регулирования, равный произведению диапазонов регулирования обоими способами, достигает (10 — 15) : 1. Регулирование изменением напряжения является регулированием с постоянным моментом (поскольку магнитный поток двигателя остается неизменным). Регулирование изменением магнитного потока двигателя Д является регулированием с постоянной мощностью.
Перед пуском двигателя Д реостат 2 (см. рис. 1) полностью выводят, и поток двигателя достигает наибольшего значения. Затем реостатом 1 увеличивают возбуждение генератора Г. Это вызывает повышение напряжения, и скорость двигателя Д увеличивается. Если обмотку ОВГ включить сразу на полное напряжение UB возбудителя В, то ток в ней, как во всякой цепи, обладающей индуктивностью и активным сопротивлением, будет нарастать:
где rв — сопротивление обмотки возбуждения, LB — ее индуктивность (влиянием насыщения магнитопровода пренебрегаем).
На рис. 3, а (кривая 1) представлен график зависимости тока возбуждения от времени. Ток возбуждения нарастает постепенно; скорость нарастания определяется соотношением

где Тв — электромагнитная постоянная времени обмотки возбуждения генератора; имеет размерность времени.
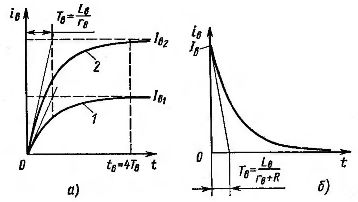
Рис. 3. Изменение тока возбуждения в системе Г—Д
Изменение напряжения генератора при пуске имеет примерно такой же характер, как и изменение силы тока возбуждения. Это дает возможность автоматического прямого пуска двигателя с выведенным реостатом 1 (см. рис. 1).
Нарастание тока возбуждения генератора часто ускоряют (форсируют), прикладывая в начальный момент к обмотке возбуждения напряжение, превышающее номинальное. Процесс нарастания возбуждения будет при этом протекать по кривой 2 (см. рис. 3, а). Когда сила тока в обмотке достигнет величины Iв1 равной установившейся силе тока возбуждения при номинальном напряжении, напряжение на обмотке возбуждения уменьшают до номинального. Время нарастания тока возбуждения до номинального уменьшается.
Для форсирования возбуждения генератора напряжение возбудителя В (см. рис. 1) выбирают в 2—3 раза превышающим номинальное напряжение обмотки возбуждения генератора и вводят в схему добавочный резистор 4. Замыкая на время пуска этот резистор накоротко контактом 5, на обмотку возбуждения подают повышенное напряжение.
Система генератор — двигатель позволяет осуществить торможение с рекуперацией. Для торможения необходимо, чтобы ток в якоре изменил свое направление. Момент при этом также изменит знак и вместо движущего станет тормозным. Торможение возникает при увеличении магнитного потока электродвигателя реостатом 2 или при уменьшении напряжения генератора реостатом 1. В обоих случаях э. д. с. Е двигателя становится выше напряжения U генератора. При этом двигатель Д работает в генераторном режиме и приводится во вращение кинетической энергией движущихся масс, а генератор Г работает в двигательном режиме, вращая со сверхсинхронной скоростью машину АД, которая при этом переходит в режим генератора и отдает энергию в сеть.
Торможение с рекуперацией можно осуществить и без воздействия на реостаты 1 и 2. Можно просто разомкнуть цепь возбуждения генератора (например, переключателем 3). При этом ток в замкнутой цепи, состоящей из обмотки возбуждения генератора и резистора 6, будет постепенно уменьшаться
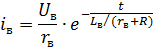
где R — сопротивление резистора 6.
График, соответствующий этому уравнению, приведен на рис. 3, б. Постепенное уменьшение тока возбуждения генератора в данном случае равносильно увеличению сопротивления реостата 1 (см. рис.1) и вызывает рекуперативное торможение. В данной схеме резистор 6, включенный параллельно обмотке возбуждения генератора, является разрядным. Он предохраняет изоляцию обмотки возбуждения от пробоя в случае внезапного аварийного обрыва цепи возбуждения.
При обрыве цепи возбуждения магнитный поток машины резко уменьшается, наводит в витках обмотки возбуждения э. д. с. самоиндукции настолько большую, что она может вызвать пробой изоляции обмотки. Разрядный резистор 6 создает контур, в котором э. д. с. самоиндукции обмотки возбуждения вызывает ток, замедляющий уменьшение магнитного потока.
Падение напряжения на разрядном резисторе равно напряжению на обмотке возбуждения. Чем меньше величина разрядного сопротивления, тем меньше будет напряжение на обмотке возбуждения при разрыве цепи. Вместе с тем при уменьшении величины сопротивления разрядного резистора возрастают непрерывно протекающий по нему в нормальном режиме ток и потери в нем. При выборе величины разрядного сопротивления должны быть учтены оба указанных положения.
После отключения обмотки возбуждения генератора на его зажимах вследствие остаточного магнетизма сохраняется некоторое небольшое напряжение. Оно может вызвать медленное вращение двигателя с так называемой ползучей скоростью. Для устранения этого явления обмотку возбуждения генератора после отключения от возбудителя присоединяют к зажимам генератора так, чтобы напряжение от остаточного магнетизма вызвало в обмотке возбуждения генератора размагничивающий ток.
Для реверса электродвигателя Д меняют направление тока в обмотке возбуждения ОВГ генератора Г посредством переключателя 3 (или иного аналогичного устройства). Вследствие значительной индуктивности обмотки ток возбуждения при этом постепенно уменьшается, меняет направление, а затем постепенно нарастает.
Процессы пуска, торможения и реверса двигателя в рассматриваемой системе отличаются высокой экономичностью, так как их осуществляют без применения реостатов, включенных в цепь якоря. Двигатель пускают и тормозят с помощью легкой и компактной аппаратуры, управляющей лишь небольшими токами возбуждения. Поэтому данную систему «генератор — двигатель постоянного тока» целесообразно использовать для работы с частыми пусками, торможениями и реверсами.
Основными недостатками системы генератор — двигатель постоянного тока являются относительно низкий коэффициент полезного действия, высокая стоимость и громоздкосгь, определяемые наличием в системе большого числа электрических машин. Стоимость системы превышает стоимость одного короткозамкнутого асинхронного двигателя такой же мощности в 8 — 10 раз. Кроме того, такая система электропривода требует много места.
Система генератор-двигатель (Г-Д)




![]()
![]()
Первоначально для питания двигателей использовался электромашинный управляемый преобразователь (система «генератор-двигатель») (рис. 4.13) [1; 2; 14].
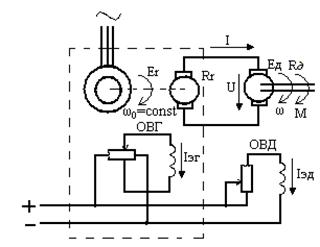
Рис. 4.13. Схема системы «генератор-двигатель».
В пунктир заключён электромашинный преобразователь, включающий в себя гонный асинхронный двигатель и генератор постоянного тока. Такой преобразователь позволяет в широком диапазоне изменять напряжение  на двигателе, изменяя ток возбуждения генератора (ОВГ). Очевидно, что в данном случае напряжение на выходе преобразователя определяется ЭДС генератора. Данная система позволяет обеспечить все возможные режимы работы двигателя. Механические характеристики двигателя (рис. 4.14) располагаются во всех 4 квадрантах. Основной режим работы двигателя в такой системе – это работа с постоянным магнитным потоком, то есть
на двигателе, изменяя ток возбуждения генератора (ОВГ). Очевидно, что в данном случае напряжение на выходе преобразователя определяется ЭДС генератора. Данная система позволяет обеспечить все возможные режимы работы двигателя. Механические характеристики двигателя (рис. 4.14) располагаются во всех 4 квадрантах. Основной режим работы двигателя в такой системе – это работа с постоянным магнитным потоком, то есть  . Мы можем записать уравнения электромеханической и механической характеристик двигателя, полагая, что
. Мы можем записать уравнения электромеханической и механической характеристик двигателя, полагая, что  :
:
 ; (4.15)
; (4.15)
 , (4.16)
, (4.16)
где  — магнитный поток двигателя;
— магнитный поток двигателя;
Rя – сопротивление якоря двигателя;
Rг – сопротивление якоря генератора.
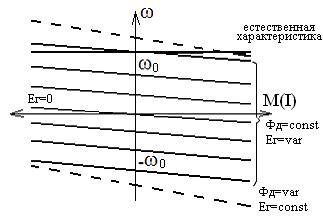
Рис. 4.14. Механические характеристики двигателя в системе Г-Д
Как видим, механические характеристики представляют параллельные прямые, наклон которых несколько больше, чем у естественной характеристики двигателя (жесткость меньше) при Ф=const. Мы наблюдаем их во всех четырёх квадрантах, т.е. двигатель может работать во всех возможных режимах. Реверс двигателя осуществляется за счет изменения полярности тока в обмотке возбуждения генератора (ОВГ).
Данная система позволяет осуществить двухзонное регулирование:
1 зона – за счет изменения напряжения (ЭДС генератора);
2 зона – за счёт изменения магнитного потока двигателя при
номинальном напряжении (характеристики показаны пунктиром
Достоинством данной системы являются плавность регулирования, широкий диапазон регулирования, возможность получения линейных непрерывных характеристик во всём диапазоне регулирования и получение всех возможных режимов работы двигателя.
К недостаткам данной системы можно отнести: утроенную установленную мощность машин, низкий КПД, большую инерционность.
4.7.2. Система «тиристорный преобразователь – двигатель (ТП-Д)»
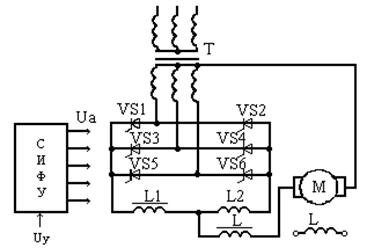
Основным типом преобразователей, применяемых в настоящее время для управления ДПТ, является тиристорный преобразователь, то есть статический полупроводниковый преобразователь. Эти преобразователи представляют управляемые реверсивные или нереверсивные, однофазные или трёхфазные выпрямители, собранные по мостовой или нулевой схеме [2; 5; 14]. Определённые перспективы развития тиристорных преобразователей связаны с использованием в них транзисторов, которые в настоящее время применяются в основном для импульсного регулирования напряжения.
Рассмотрим характеристики привода на примере использования в нем простейшего нереверсивного статического преобразователя.
|
|
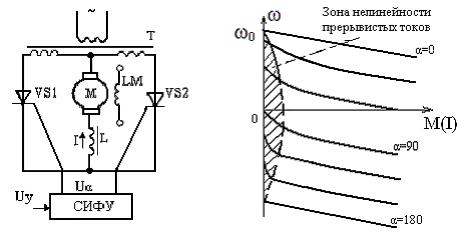
Преобразователь включает в себя в общем случае согласующий трансформатор Т, два тиристора VS1 и VS2, сглаживающий дроссель L и систему импульсно-фазового управления (СИФУ). Преобразователь обеспечивает регулирование напряжения на Д за счёт изменения среднего значения ЭДС преобразователя. Это достигается регулированием с помощью СИФУ угла управления  тиристорами (угол представляет собой угол задержки открытия тиристоров относительно момента, когда напряжение на анодах становится положительным). Зависимость среднего значения ЭДС от угла для многофазного преобразователя:
тиристорами (угол представляет собой угол задержки открытия тиристоров относительно момента, когда напряжение на анодах становится положительным). Зависимость среднего значения ЭДС от угла для многофазного преобразователя:
 , (4.17)
, (4.17)
где  — число фаз преобразователя;
— число фаз преобразователя;
 — амплитудное значение ЭДС преобразователя;
— амплитудное значение ЭДС преобразователя;
 — ЭДС преобразователя при
— ЭДС преобразователя при  .
.
В связи с пульсирующим характером ЭДС на выходе преобразователя ток в цепи Д также пульсирует. Такой характер тока оказывает вредное влияние на работу Д: ухудшаются условия коммутации, возникают дополнительные потери на нагрев. Для уменьшения пульсаций тока в цепь якоря Д включают сглаживающий дроссель. Габариты преобразователя и его вес определяются размерами дросселя и трансформатора. Уравнения электромеханической и механической характеристик имеют вид:

 , (4.18)
, (4.18)
 . (4.19)
. (4.19)
 — эквивалентное сопротивление преобразователя;
— эквивалентное сопротивление преобразователя;
— число фаз преобразователя;
 и
и  — приведённые ко вторичной обмотке трансформатора индуктивное сопротивление рассеянья и активное сопротивление обмотки трансформатора;
— приведённые ко вторичной обмотке трансформатора индуктивное сопротивление рассеянья и активное сопротивление обмотки трансформатора;
 — активное сопротивление обмотки дросселя L.
— активное сопротивление обмотки дросселя L.
Особенностью характеристик Д при питании его от управляемого выпрямителя является наличие зоны прерывистых токов, в пределах которой характеристики нелинейны. Жесткость характеристик в этой зоне резко изменяется. Вследствие односторонней проводимости преобразователя характеристики располагаются в первом и четвёртом квадранте. Меньшим углам соответствует большая ЭДС и большая частота вращения. При  ЭДС преобразователя равна нулю и мы имеем режим динамического торможения.
ЭДС преобразователя равна нулю и мы имеем режим динамического торможения.
Для получения характеристик Д во всех четырёх квадрантах используются реверсивные управляемые выпрямители, которые обычно составляют из двух нереверсивных. Работу во всех четырёх квадрантах можно также обеспечить и при использовании нереверсивных преобразователей, за счет изменения направления тока в обмотке возбуждения Д. В реверсивных преобразователях используют два основных принципа управления: совместное и раздельное.
 |
|
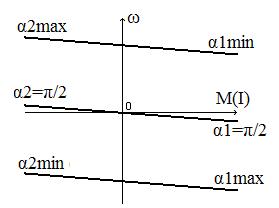
Рис. 4.17, б. Механические характеристики двигателя в системе ТП-Д с реверсивным управляемым выпрямителем
При совместном управлении в работе участвуют все вентили (тиристоры). При этом от СИФУ импульсы управления, подаваемые на катодный комплект (VS1,VS3,VS5), и импульсы, подаваемые на анодный комплект (VS2,VS4,VS6), сдвинуты на угол, близкий к  . Один комплект работает в выпрямительном режиме и проводит ток, а другой в инверторном режиме и ток не проводит. При этом между средними значениями ЭДС выпрямителя и инвертора устанавливается соотношение:
. Один комплект работает в выпрямительном режиме и проводит ток, а другой в инверторном режиме и ток не проводит. При этом между средними значениями ЭДС выпрямителя и инвертора устанавливается соотношение:
 ,
,
но за счёт разности мгновенных значений ЭДС между комплектами вентилей протекают токи, называемые уравнительными. Для их ограничения в схеме предусмотрены реакторы  и
и  . Вид механических характеристик Д зависит от способа согласования углов управления двумя комплектами вентилей. При линейном согласовании сумма углов выпрямителя
. Вид механических характеристик Д зависит от способа согласования углов управления двумя комплектами вентилей. При линейном согласовании сумма углов выпрямителя  и инвертора
и инвертора  поддерживается равной (то есть
поддерживается равной (то есть  ). При этом механические характеристики линейны во всех четырёх квадрантах и практически соответствуют характеристикам в системе Г-Д.
). При этом механические характеристики линейны во всех четырёх квадрантах и практически соответствуют характеристикам в системе Г-Д.
В ряде случаев для уменьшения уравнительных токов используют нелинейное согласование, при котором сумма углов управления и несколько отличается от . В этом случае уравнительные токи уменьшаются, но при переходе Д из двигательного в генераторный режим имеет место заметное увеличение скорости, то есть характеристики двигателя становятся нелинейными, поэтому этот способ согласования применяется редко.
Раздельное управление используется для полного исключения уравнительных токов. Сущность его состоит в том, что импульсы управления подаются только на один комплект вентилей, который в данный момент времени проводит ток. На второй комплект импульсы не подаются, и он закрыт. Управление преобразователем в этом случае осуществляется с помощью специального логического устройства. Это устройство осуществляет контроль за током преобразователя, обеспечивает в функции входного сигнала включение и выключение комплектов вентилей с небольшой паузой в 5-10 мс. В результате при переходе из одного режима работы в другой вблизи оси скорости наблюдается режим прерывистых токов, что приводит к нелинейности характеристик.
На сегодняшний день система ТП-Д получила наибольшее распространение из-за следующих достоинств:
1. Плавность и значительный диапазон регулирования скорости.
2. Высокая жесткость механических характеристик.
3. Высокий КПД электропривода (КПД преобразователя определяют КПД трансформатора 0,93-0,98 и КПД выпрямителя 0,9-0,92).
4. Малая инерционность, высокое быстродействие.
5. Бесшумность в работе, простота в обслуживании и эксплуатации.
Но наряду с этим существуют и следующие недостатки:
1. Односторонняя проводимость преобразователя.
2. Для получения характеристик во всех четырёх квадрантах необходимость использования двухкомплектного реверсивного преобразователя.
3. Напряжение на якоре двигателя имеет пульсирующий характер, что ухудшает его работу.
4. Необходимость сглаживания пульсаций приводит к применению сложных многофазных систем выпрямления и достаточно дорогих и тяжелых дросселей.
5. Работа управляемого выпрямителя характеризуется режимом прерывистых токов, что приводит к нелинейности характеристик.
6. С ростом диапазона регулирования скорости снижается коэффициент мощности (cosφ ≈ cosα; cosφ = cos(α + γ/2), где γ – угол коммутации).
7. Вентильный преобразователь вносит искажение в форму тока и напряжения источника питания.
8. Тиристорные преобразователи имеют невысокую помехозащищенность и малую перегрузочную способность.







