Электродвигатели предназначены для привода механизмов, не требующих регулирования частоты вращения, и рассчитаны для работы в продолжительном режиме S1, от сети переменного тока частотой 50 Гц или 60 Гц, cosφ = 0,9 (опережающий).
Двигатели изготавливаются на напряжение 6000 В; при поставке на экспорт в страны с умеренным и тропическим климатом двигатели могут изготавливаться на напряжение 6300 В, 6600 В.
Возбуждение двигателей — от тиристорных возбудителей.
По требованию заказчика, на базе вышеуказанных машин могут быть изготовлены двигатели на другие мощности, напряжения и частоту сети.
Двигатели выполняются на подшипниках скольжения с кольцевой смазкой, с одним концом вала, на лапах. Выводные концы выведены в коробку выводов.
Степень защиты двигателей СДН2 — IP11; СДНЗ2 — IP43.
По установочноприсоединительным размерам, двигатели серии СДН2 взаимозаменяемы с двигателями серии СДН4.
Расшифровка обозначений
[СДН][(С)][З]-[2]-[16]-[31]-[6][У3] [СДН]: синхронный двигатель нормальный; [(С)]: специальный; [З]: закрытый; [2]: вторая серия; [16]: условное обозначение габарита; [31]: условная длина сердечника статора; [6]: число полюсов; [У3]: климатическое исполнение и категория размещения.
Типы синхронных машин и их устройство
Читайте также:
АВТОМАТИЗАЦИЯ МАШИННОГО ДОЕНИЯ КОРОВ
АВТОМАТИЗАЦИЯ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ МОЙКИ И ОЧИСТКИ МАШИН, АГРЕГАТОВ
Административно-политическое устройство в Крымском ханстве 1 страница
Административно-политическое устройство в Крымском ханстве.
Административно-территориальное устройство субъектов России.
Административно-территориальное устройство субъектов РФ.
Административно-территориальное устройство субъектов РФ.
Анализ обеспеченности и использования машин и оборудования
Аналитическая машина Бэббиджа
Аналитический метод расчета рабочих характеристик асинхронных двигателей
Синхронная машина состоит из неподвижной части — статора — и вращающейся части — ротора. Статоры синхронных машин в принципе не отличаются от статоров асинхронных двигателей, т. е. состоят из корпуса, сердечника и обмотки.
Конструктивное исполнение статора синхронной машины может быть различным в зависимости от назначения и габаритов машины. Так, в многополюсных машинах большой мощности при наружном диаметре сердечника статора более 900 мм пластины сердечника делают из отдельных сегментов, которые при сборке образуют цилиндр сердечника статора. Корпуса статоров крупногабаритных машин делают разъемными, что необходимо для удобства транспортировки и монтажа этих машин.
Роторы синхронных машин могут иметь две принципиально различающиеся конструкции: явнополюсную и неявнополюсную.В энергетических установках по производству электроэнергии переменного тока в качестве первичных (приводных) двигателей синхронных генераторов применяют в основном три вида двигателей: паровые турбины, гидравлические турбины либо двигатели внутреннего сгорания (дизели). Применение любого из перечисленных двигателей принципиально влияет на конструкцию синхронного генератора.
Если приводным двигателем является гидравлическая турбина, то синхронный генератор называют гидрогенератором. Гидравлическая турбина обычно развивает небольшую частоту вращения (60—500 об/мин), поэтому для получения переменного тока промышленной частоты (50 Гц) в гидрогенераторе применяют ротор с большим числом полюсов.
Рис. 19.3. Конструкция роторов синхронных машин: а — ротор с явно выраженными полюсами; б—ротор с неявно выраженными полюсами
Роторы гидрогенераторов имеют явнополюсную конструкцию, т. е. с явно выраженными полюсами, при которой каждый полюс выполняют в виде отдельного узла, состоящего из сердечника /, полюсного наконечника 2 и полюсной катушки 3 (рис. 19.3, а). Все полюсы ротора закреплены на ободе 4, являющемся также и ярмом магнитной системы машины, в котором замыкаются потоки полюсов. Гидрогенераторы обычно изготовляются с вертикальным расположением вала (рис. 19.4).
Паровая турбина работает при большой частоте вращения, поэтому приводимый ею во вращение генератор, называемый турбогенератором, является быстроходной синхронной машиной. Роторы этих генераторов выполняют либо двухполюсными (n1= 3000 об/мин), либо четырехполюсными (n1 =1500об/мин).
В процессе работы турбогенератора на его ротор действуют значительные центробежные силы. Поэтому по условиям механической прочности в турбогенераторах применяют неявнлюсный ротор, имеющий вид удлиненного стального цилиндра с профрезерованными на поверхности продольными пазами для обмотки возбуждения (см. рис. 19.3, б). Сердечник неявнополюсного ротора изготовляют в виде цельной стальной поковки вместе с хвостовиками (концами вала) или же делают сборным. Обмотка возбуждения неявнополюсного ротора занимает лишь 2/з его поверхности (по периметру). Оставшаяся ‘/3 поверхности образует полюсы. Для защиты лобовых частей обмотки ротора от разрушения действием центробежных сил ротор с двух сторон прикрывают стальными бандажными кольцами (каппами), изготовляемыми обычно из немагнитной стали.
Турбогенераторы (рис. 19.5) и дизель-генераторы изготовляют с горизонтальным расположением вала. Дизель-генераторы рассчитывают на частоту вращения 600—1500 об/мин и выполняют с явнополюсным ротором (рис. 19.6).
Большую группу синхронных машин составляют синхронные двигатели, которые обычно изготовляются мощностью до нескольких тысяч киловатт и предназначены для привода мощных вентиляторов, мельниц, насосов и других устройств, не требующих регулирования частоты вращения. Рассмотрим устройство синхронного двигателя серии СДН2 (рис. 19.7). Двигатели этой серии изготовляются мощностью от 315 до 4000 кВт при частотах вращения от 300 до 1000 об/мин и предназначены для включения в сеть частотой 50 Гц при напряжении 6 кВ.
Сердечник статора 4, запрессованный в стальной корпус, состоит из пакетов-сегментов, собранных из штампованных листов электротехнической стали толщиной 0,5 мм. Для лучшего охлаждения двигателя пакеты разделены радиальными вентиляционными каналами шириной по 10 мм. Обмотка статора
Рис. 19.7: Устройство синхронного двигателя серии СДН2двухслойная с укороченным шагом (см. гл. 7). Сердечники полюсов 11 ротора крепятся к остову 3 шпильками 5. Обмотка ротора состоит зполюсных катушек. Контактные кольца 8 крепятся на конце вала. На роторе имеются лопатки 6 центробежного вентилятора. Стояковые подшипники скольжения 2 и 7 установлены на подшипниковых полущитах 1 и 9. Двигатель с торцовых сторон прикрыт стальными щитами 13. В обшивке 10
Рис. 19.8. Полюс синхронного двигателя
корпуса имеются вентиляционные окна, прикрытые жалюзи. На боковой поверхности корпуса расположена коробка выводов 14. Возбуждение двигателей осуществляется от тиристорных преобразователей с автоматическим регулированием тока возбуждения при пуске и остановке двигателей.
На рис. 19.8 показано более подробно устройство элемента синхронного двигателя, характерное для большинства конструкций. На вал 1 посажен шихтованный обод 2, на котором посредством Т-образного хвостовика крепится сердечник полюса 3, выполненный заодно с полюсным наконечником. Сердечники полюсов изготовлены из штампованных листов конструкционной стали толщиной 1,0 или 1,5 мм. Хвостовик полюса, запирается в продольном пазе обода посредством клиньев 9. Возможно также крепление полюсов к ободу посредством «ласточкина хвоста» (см. рис. 19.3) или шпилек (см. рис. 19.7). Стальные щеки 4, стягиваемые шпильками, предотвращают распушение пакета полюса ротора. Щеки имеют заплечики, удерживающие полюсную катушку ротора 5.В пазах полюсных наконечников расположены латунные или медные стержни 6 пусковой (успокоительной) обмотки, замкнутые с двух сторон сегментами 7.Между наружной поверхностью полюсного наконечника и внутренней поверхностью сердечника статора 8 имеется воздушный зазор. По оси полюса этот зазор 6 минимален, а на краях — максимален 6тах- Такая конфигурация полюсного наконечника необходима для синусоидального распределения магнитной индукции в воздушном зазоре. Она достигается тем, что поверхность полюсного наконечника имеет радиус R
Дата добавления: 2015-02-09 ; просмотров: 65 ; Нарушение авторских прав
Что такое синхронный двигатель и как он работает?
В качестве устройства преобразования электрической энергии в механическую в промышленности и быту используется синхронный электродвигатель. В сравнении с другими типами электрических машин он получил меньшее распространение, но в отведенных сферах является незаменимым фаворитом. В чем особенность синхронных агрегатов и как их применяют на практике, мы рассмотрим в данной статье.
Устройство
Конструктивно синхронный электродвигатель состоит из неподвижного элемента, подвижной части, обмоток различного назначения, может комплектоваться коллекторным узлом. Далее рассмотрим каждую составляющую синхронного агрегата более детально на рабочем примере (рисунок 1).
Рис. 1. Устройство синхронного электродвигателя
Статор или якорь – выполняется из электротехнической стали монолитным или наборным из шихтованного железа. Предназначен для размещения рабочей обмотки, проводит силовые линии электромагнитного поля, формируемого протекающими токами.
Обмотка на статоре – изготавливается из медных проводников, в зависимости от типа статора синхронного электродвигателя может выполняться различными методами, способами намотки и расположения проводников. Применяется для подачи напряжения питания и формирования рабочего магнитного потока.
Ротор с обмоткой возбуждения – предназначен для взаимодействия с магнитным полем статора. В результате подачи напряжения на обмотку возбуждения в роторе электродвигателя создается собственное магнитное поле, задающее состояние вращающегося элемента.
Вал – используется для передачи вращательного усилия от электродвигателя к подключаемой к нему нагрузке. В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы.
Контактные кольца – применяются для подачи питания на обмотки ротора, но устанавливаются не во всех моделях синхронных агрегатов. Питание производиться через специальный преобразователь переменного напряжения в постоянное.
Корпус – предназначен для защиты от воздействия внешних факторов, обеспечивает синхронному двигателю достаточную прочность и герметичность, в зависимости от условий его эксплуатации.
Принцип работы
В основе работы синхронного электродвигателя лежит взаимодействие магнитного потока, генерируемого рабочими обмотками с постоянным магнитным потоком. Наиболее распространенной моделью синхронной электрической машины является вариант с рабочей обмоткой на статоре и обмоткой возбуждения на роторе.
Рис. 2. Принцип действия синхронного электродвигателя
Как видите на рисунке 2 выше, в обмотку статора подается трехфазное напряжение из сети, которое формирует переменное магнитное поле. На обмотки ротора электродвигателя подано постоянное напряжение, которое индуцирует такой же постоянный магнитный поток у полюсов. Для наглядности рассмотрим процесс на упрощенной модели синхронного агрегата (рисунок 3).
Рис. 3. Принцип формирования потоков в синхронной электрической машине
При подаче питания на фазные витки статора электродвигателя первый пик амплитуды тока и ЭДС взаимоиндукции приходиться на фазу A, затем B и фазу C.
На графике показана периодичность чередования кривых в зависимости от времени:
в точке 1 максимальная ЭДС EA формирует максимальный поток, а электродвижущие силы фаз EB и EC равны между собой и противоположны по знаку, они дополняют результирующую силу.
в точке 2 пика достигает ЭДС EB, а электродвижущие силы фаз EA и EC становятся равны между собой и противоположны по знаку, они дополняют результирующую силу, в результате чего магнитное поле совершает вращательное движение.
в точке 3 максимум приходиться на ЭДС EC, а электродвижущие силы фаз EB и EA вместе дополняют результирующую силу и снова смещают вектор поля по часовой стрелке.
Оборот поля статора происходит в течении периода, а за счет того, что ротор обладает собственным электромагнитным усилием постоянным во времени, то он синхронно следует за движением переменного магнитного поля, вращаясь вокруг заданной оси. В результате такого вращения происходит синхронное движение ротора вслед за сменой амплитуды ЭДС в витках рабочих обмоток, за счет этого явления электродвигатель и получил название синхронного. Наличие отдельного питания отразилось и на схематическом обозначении таких электрических машин (рисунок 4) в соответствии с ГОСТ 2.722-68.
Рис. 4. Схематическое обозначение синхронного электродвигателя
Отличие от асинхронного двигателя
Основным отличием синхронного электродвигателя от асинхронного заключается в принципе преобразования электрической энергии в механическое вращение. У синхронного электродвигателя процесс вращения ротора идентичен вращению рабочего электромагнитного поля, вырабатываемого трехфазной сетью. А вот у асинхронного рабочее поле самостоятельно наводит ЭДС в роторе, которая уже затем вырабатывает собственный поток взаимоиндукции и приводит вал во вращение. В результате чего асинхронные электрические машины получают разность во вращении рабочего поля и нагрузки на валу, что выражается физической величиной – скольжением.
В работе классические модели асинхронных электродвигателей с короткозамкнутым ротором:
плохо переносят перегрузки;
имеют сложности пуска со значительным усилием;
меняют скорость вращения, в зависимости от нагруженности рабочего органа.
В некоторой степени эти недостатки преодолевает асинхронный двигатель с фазным ротором, но в полной мере избавиться от недостатков получается лишь синхронному агрегату.
Рис. 5. Отличие асинхронного от синхронного электродвигателя
Разновидности
В современной промышленности и бытовых приборах синхронные электродвигатели используются для решения самых разнообразных задач. Как результат, существенно разнятся и их конструктивные особенности. На практике выделяют несколько критериев, по которым разделяются виды синхронных агрегатов. В соответствии с ГОСТ 16264.2-85 могут подразделяться по таким техническим характеристикам:
питающему напряжению;
частоте рабочего напряжения;
количеству оборотов.
В зависимости от способа получения поля ротора выделяют такие типы синхронных электродвигателей:
С обмоткой возбуждения на роторе – синхронизирующее усилие создается за счет подачи питания от преобразователя.
С магнитным ротором – на валу устанавливается постоянный магнит, выполняющий те же функции, что и обмотка возбуждении, но без необходимости подпитки (см. рисунок 6).
Рис. 6. Синхронный электродвигатель с постоянными магнитами
С реактивным ротором — конструкция выполнена таким образом, что в его сердечнике происходит преломление магнитных линий, приводящее всю конструкцию в движение (см. рисунок 7). Под воздействием силового поля поперечные и продольные составляющие в роторе не равны за счет чего пластины поворачиваются вслед за полем.
Рис. 7. Пример реактивного ротора
В зависимости от наличия полюсов все синхронные электродвигатели можно подразделить на:
явнополюсные – в конструкции четко видны обособленные полюса с обмотками, применяются для малых скоростей;
неявнополюсные – полюс не выделяется, такие модели устанавливают для высоких скоростей;
В зависимости от расположения рабочих обмоток различают прямые (на статоре) и обращенные (рабочие обмотки на роторе).
Режимы работы
Большинство электрических машин обладают обратимой функцией, не составляют исключения и синхронные агрегаты. Их также можно использовать в качестве электрического привода или в качестве генератора, вырабатывающего электроэнергию. Оба режима отличаются способом воздействия на электрическую машину – подачу напряжения на рабочие обмотки или приведение в движение ротора за счет механического усилия.
Генераторный режим
Для производства электроэнергии в сеть используются именно синхронные генераторы. В большинстве случаев для этой цели используются электрические машины с фазными обмотками на статоре, что существенно упрощает процесс съема мощности и дальнейшей передачи ее в сеть. Физически генерация происходит при воздействии электромагнитного поля обмотки возбуждения синхронного генератора с обмотками статора. Силовые линии поочередно пересекают фазные витки и наводят в них ЭДС взаимоиндукции, в результате чего на клеммных выводах возникает напряжение.
Частота получаемого напряжения напрямую зависит от скорости вращения вала и вычисляется по формуле:
f = (n*p)/60 ,
где n – скорость вращения вала, измеряемая в оборотах за минуту, p – количество пар полюсов.
Синхронный компенсатор
В виду физических особенностей синхронного электродвигателя при холостом ходе аппарата он потребляет из сети реактивную мощность, что позволяет существенно улучшить cosφ системы, практически приближая его к 1.На практике режим синхронного компенсатора используется как для улучшения коэффициента мощности, так и для стабилизации параметров напряжения сети.
Двигательный режим
В синхронной машине двигательный режим осуществляется при подаче рабочего трехфазного напряжения на обмотки якоря. После чего электромагнитное поле якоря начинает толкать магнитное поле ротора, и вал приходит во вращение. Однако на практике двигательный режим осуществляется не так просто, так как мощные агрегаты не могут самостоятельно набрать необходимый ресурс скорости. Поэтому во время запуска используют специальные методы и схемы подключения.
Способы пуска и схемы подключения
Для запуска синхронного электродвигателя требуется дополнительное поле, независимое от воздействия сети. В то же время, на стартовом этапе запуск представляет собой асинхронный процесс, пока агрегат не достигнет синхронной скорости.
Рис. 8. Схема пуска синхронного двигателя
При подаче напряжения на якорь возникает ток в его обмотках и генерация ЭДС в железе ротора, который обеспечивает асинхронное движение до того момента, пока не начнется питание обмоток возбуждения.
Еще одним распространенным вариантом пуска является использование дополнительных генераторов, которые могут располагаться на валу или устанавливаться отдельно. Такой метод обеспечивает дополнительное стартовое усилие за счет стороннего крутящего момента.
Рис. 9. Генераторный способ пуска синхронного двигателя
Как видите на рисунке 9, начальное вращение мотора М осуществляется за счет генератора G, который призван вывести устройство на подсинхронную скорость. Затем генератор выводится из рабочей цепи путем размыкания контактов КМ или автоматически при установке рабочих характеристик. Дальнейшее поддержание синхронного режима происходит за счет подачи постоянного напряжения в обмотку возбуждения.
Помимо этого на практике используется схема пуска с полупроводниковыми преобразователями. На рисунке 10 приведен способ тиристорного преобразователя и с установкой вращающихся выпрямителей.
Рис. 10. Тиристорная схема пуска синхронного двигателя
В первом случае запуск синхронного электродвигателя характеризуется нулевым напряжением от преобразователя UD. За счет ЭДС скольжения через стабилитроны VD осуществляется открытие тиристоров VS. В цепь обмотки возбуждения вводится резистор R, предназначенный для предотвращения пробоя изоляции. По мере разгона электродвигателя ЭДС скольжения пропорционально снизится и произойдет запирание стабилитронов VD, цепочка заблокируется, и обмотка возбуждения получит питание постоянным напряжением через UD.
Применение
Область применения синхронных электрических машин охватывает производство электрической энергии на электростанциях. По видам генераторы подразделяются на турбинные, дизельные и гидравлические, в зависимости от способа приведения их во вращение.
Также их используют в качестве электродвигателей, которые могут переносить существенные перегрузки в процессе эксплуатации. Такие двигатели устанавливаются на вентиляторах, компрессорах, силовых агрегатах и прочем оборудовании. Отдельная категория электродвигателей применяется в точном оборудовании, где важна синхронизация операций и процессов.
Преимущества и недостатки
К преимуществам такого электродвигателя следует отнести:
высокий cosφ, приближающийся по величине к 1, что в значительной мере превосходит асинхронные электродвигатели;
более высокая механическая прочность за счет особенностей конструкции электродвигателя;
зависимость момента вращения от напряжения линейная, а не квадратичная, поэтому колебания электродвигателя пропорционально снижаются;
на валу электродвигателя присутствует постоянная скорость, не зависящая от прикладываемой нагрузки;
может применяться для уменьшения реактивной составляющей в сети.
Среди недостатков синхронных электродвигателей выделяют:
сложную конструкцию;
более сложный пуск;
необходимость использования вспомогательных устройств и блоков;
такие электродвигатели сложнее регулировать по числу оборотов;
ремонт и обслуживание также обойдется дороже, чем асинхронные электродвигатели.





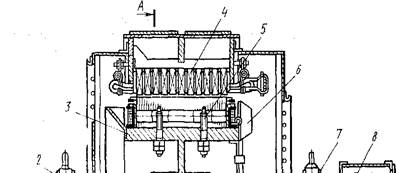
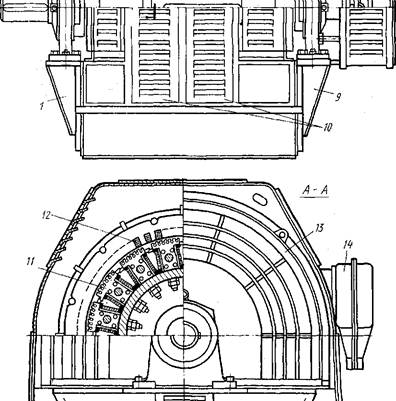



 Рис. 1. Устройство синхронного электродвигателя
Рис. 1. Устройство синхронного электродвигателя  Рис. 2. Принцип действия синхронного электродвигателя
Рис. 2. Принцип действия синхронного электродвигателя Рис. 3. Принцип формирования потоков в синхронной электрической машине
Рис. 3. Принцип формирования потоков в синхронной электрической машине Рис. 4. Схематическое обозначение синхронного электродвигателя
Рис. 4. Схематическое обозначение синхронного электродвигателя Рис. 5. Отличие асинхронного от синхронного электродвигателя
Рис. 5. Отличие асинхронного от синхронного электродвигателя Рис. 6. Синхронный электродвигатель с постоянными магнитами
Рис. 6. Синхронный электродвигатель с постоянными магнитами Рис. 7. Пример реактивного ротора
Рис. 7. Пример реактивного ротора Рис. 8. Схема пуска синхронного двигателя
Рис. 8. Схема пуска синхронного двигателя Рис. 9. Генераторный способ пуска синхронного двигателя
Рис. 9. Генераторный способ пуска синхронного двигателя Рис. 10. Тиристорная схема пуска синхронного двигателя
Рис. 10. Тиристорная схема пуска синхронного двигателя






