Сила движущая агрегат сопротивление сельскохозяйственных машин
Поступательное движение машинно-тракторного агрегата оказывается возможным, если трактор преодолевает все сопротивления, возникающие при передвижении и работе машин. Различают сопротивление машин передвижению рабочее и холостое. Рабочее сопротивление создается при выполнении машиной технологических процессов (при рабочем ходе машины). Холостое сопротивление возникает при холостых заездах, поворотах и переездах.
Общее сопротивление машин можно разделить на две группы:
а) сопротивление рабочих органов машин при передаче на них энергии от вала отбора мощности трактора;
б) сопротивление на перемещение машины по полю при рабочем ходе или тяговое сопротивление (при отсутствии привода от ВОМ или при наличии привода).
Первая группа сопротивлений по своей величине зависит в основном от физико-механических свойств и количества перерабатываемого материала, поступающего на рабочие органы машин в единицу времени (например, для агрегата с силосоуборочным комбайном — от секундной подачи). Потребная мощность двигателя трактора, идущая на преодоление этих сопротивлений, ограничивается предельной пропускной способностью основных узлов машины, а также необходимостью иметь достаточный запас мощности для преодоления второй группы сопротивлений. Затраты мощности на привбд машин изменяются в широких пределах (10—50 л. е.).
Рекламные предложения на основе ваших интересов:
Вторая группа сопротивлений, или тяговое сопротивление машины, зависит от многих факторов, в том числе от типа и состояния машины, выполняемой работы, скорости движения, от типа и состояния почвы, ее влажности, засоренности, предшествующей обработки, рельефа поля и др.
Изучая тяговое сопротивление машины на примере прицепного плуга, академик В. П. Горячкин установил, что при ее равномерном рабочем движении сопротивление можно представить в виде трех слагаемых:
1) сопротивлений на перекатывание и протаскивание машины (вредные сопротивления от сил трения, качения и скольжения, пропорциональные в основном массе машины);
2) сопротивлений, возникающих при деформации обрабатываемого материала R2 (полезные сопротивления), зависящих от физико-механических свойств материала, типа и состояния рабочих органов;
3) сопротивлений, появляющихся при перемещении и отбрасывании обрабатываемого материала R3 (могут быть как вредными, например отбрасывание почвы лапками культиватора при прополке сорняков, так и полезными, например перемещение почвы окучниками при окучивании картофеля).
Общее сопротивление машины (кгс):
R = R1 + Ri + R3. (10)
Эта формула получила название рациональной, поскольку в значительной мере отражает физическую сущность возникновения составляющих общего тягового сопротивления машин. Фактически при оценке сопротивлений любой сельскохозяйственной машины (а не только плуга) можно выделить указанные составляющие. Однако величины отдельных составляющих в общем сопротивлении машин могут значительно изменяться.
Сложность опытного определения коэффициентов для нахождения составляющих рациональной формулы и неустойчивость даже их средних значений привели к тому, что для практических расчетов применяют более простые и надежные методы определения тяговых сопротивлений сельскохозяйственных машин.
Тяговое сопротивление прицепных машин определяют опытным путем с помощью динамометра или тягового работомера. Для навесных машин используют специальные ротационные динамометры или работомеры двигателя, позволяющие косвенным путем определить тяговое сопротивление.
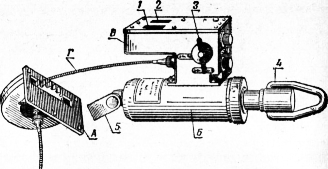
Рис. 1. Тяговый работомер РТТК — АФИ :
А — привод; Б — силовое звено; В — считающий механизм; Г — гибкий трос; 1 — счетчик пути; 2 — счетчик работы; 3 — включатель; 4 — прицепная серьга к орудию; 5 — тракторная прицепная серьга.
Чтобы избежать большого количества справочных опытных данных о тяговых сопротивлениях различных марок однородных машин, вводится понятие удельного тягового сопротивления машин — тяговое сопротивление, приходящееся на единицу ширины захвата машины (обычно на 1 м захвата). Для получения удельных сопротивлений опытное полное сопротивление Ron машины (среднее) делят на ее фактический захват:

Рис. 1. Тяговый динамометр.
Для практических расчетов тяговых сопротивлений плугов пользуются простыми формулами, построенными аналогично формуле для определения сопротивлений других машин.
При определении сопротивлений навесных машин нужно учитывать, что часть их массы передается на трактор, из-за чего возрастает его сопротивление перекатыванию и соответственно уменьшается сопротивление машины. Зная долю массы машины, приходящуюся на трактор, можно найти сопротивление навесной машины. Так как масса навесных машин значительно меньше однотипных прицепных (для одинакового рабочего захвата), то и сопротивление навесных машин оказывается меньше на 10—15%.
ТЯГОВОЕ СОПРОТИВЛЕНИЕ С/Х АГРЕГАТА. ПУТИ УЛУЧШЕНИЯ ЭКСПЛУАТАЦИОННО-ТЕХНОЛОГИЧЕСКИХ СВОЙСТВ С/Х МАШИНЫ.
Тяговое сопротивление рабочей машины — суммарная сила сопротивления, возникающая при перемещении по полю. Общее тяговое сопротивление складывается из сил сопротивления перемещению машины по полю в составе агрегата и сил взаимодействия рабочих органов с обрабатываемой средой. Тяговое сопротивление машин определяется по формуле:
где bм-ширина захвата машины, м
Км-удельное сопротивление машины, Н/м
На тяговое сопротивление машин влияет множество факторов , значительная часть которых в процессе работы изменяется случайным (в вероятностном смысле) образом. Соответственно и тяговое сопротивление машин будет иметь вероятностный характер изменения. От изменчивости тягового сопротивления машин зависят показатели работы двигателя: развиваемая мощность; удельный расход топлива; показатели надежности.
Полное рабочее тяговое сопротивление машин для условий ровного рельефа определяют по упрощенной формуле
где Kм—удельное сопротивление, приходящееся на 1м ширины захвата, кН/м;
вм — ширина захвата машины, м.
Сопротивление перемещению машин также входит в состав Км. Значения Км для соответствующих видов работ определяют по результатам опытов. Численное значение удельного тягового сопротивления в указанном диапазоне определяют из равенства
где KMо — удельное сопротивление при скорости до vo= 1,4 м/с (5 км/ч), кН/м;
АК-относительное приращение удельного сопротивления при увеличении скорости на 1 м/с.
Численные значения KMо, а также АК длявсех основных типов машин приводятся в справочной литературе.
В условиях неровного рельефа удельное сопротивление сельскохозяйственных машин рассчиты-вают по формуле
mму — удельная масса машины, приходящаяся на 1 м ширины захвата, кг/м. Суммарное удельное тяговое сопротивление всего агрегата
mсу — удельная масса сцепки в расчете на 1 м ширины захвата агрегата, кг/м; fс — коэффициент сопротивления качению сцепки – приводятся в справочниках.
Эффективные пути повышения эксплуатационно-технологических свойств с/х машин:
· увеличить мощность Nн путем создания более мощной с/х техники;
· увеличить коэффициент загрузки двигателя еN путем выбора рационального сотава и скоростного режима МТА;
· увеличить тяговый КПД трактора и КПД ВОМ за счет конструктивного совершенствования;
· увеличить коэффициент использования времени смены путем сокращения непроизводительных потерь времени смены;
· увеличить коэффициент сменности Ксм путем создания необходимых материальных и организационных условий для многосменной работ; увеличить пропускную способность уборочных агрегатов.
| | | следующая лекция ==> | |
| Защита государственной тайны в послевоенный период | | | Диаграмма переходов состояний процедуры начального выравнивания |
Дата добавления: 2016-04-19 ; просмотров: 3294 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Сила, движущая агрегат
Механизм возникновения движущей агрегат силы можно рассмотреть на схеме сил и моментов, действующих на ведущее колесо с пневматической шиной при установившемся движении по деформируемой поверхности (допущения – шина гладкая, без почвозацепов), рисунок 4.3.
Момент, переданный от двигателя на ведущие колеса, будет равен:
где im — общее передаточное число трансмиссии (от коленчатого вала двигателя до ведущих колес); ηм — общий механический КПД силовой передачи; Мд – крутящий момент на коленчатом вале двигателя, Н·м.
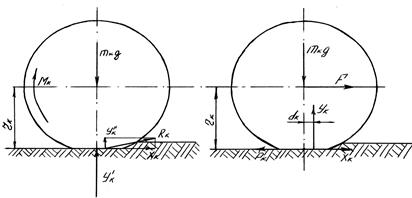
Рисунок 4.3 – Схема сил и моментов, действующих на ведущее колесо с пневматической шиной при установившемся движении по деформируемой поверхности
Момент на ведущем колесе Мк (рисунок 4.3) вызывает возникновение между колесом и почвой соответствующей касательной реакции Rx. Ее величина и направление зависит от момента Мк, физико-механических свойств и величины деформации почвы, радиальной и тангенциальной жесткости пневматической шины.
Rx разложим на две составляющие Xk и Y»k. Xk – это проекция касательной реакции почвы на ось параллельную плоскости качения, Y»k – это проекция касательной реакции почвы на ось, перпендикулярную плоскости качения и параллельную силе тяжести mk·g.
Представим на основании известных законов механики крутящий момент на ведущем колесе Мк парой горизонтальных сил F=Pк с плечом rк приложенных к оси и ободу колеса и вертикальные реакции почвы Y’k и Y»k равнодействующей Yk, смещенный от оси на расстояние d из-за деформаций почвы и шины (рисунок 4.3).
Yк·d=Mf·k – момент сопротивления качению ведущего колеса.
Отношение Мк/rк называют касательной силой тяги и обозначают Рк. Касательную силу тяги можно определить по формуле:
где ΣМво – суммарный крутящий момент, передаваемый через валы отбора мощности, приведенный к коленчатому валу двигателя, Н·м ; rk – динамический радиус качения ведущего колеса, м.
Сила же F, приложенная к оси колеса, но направленная в сторону движения (как и сила Xк), будет движущей силой, вызывающей перемещение колеса.
Таким образом, движущая агрегат сила создается двигателем трактора, величина которой определяется реакцией почвы и направлена по движению параллельно плоскости качения.
Выразим движущую агрегат силу:
то есть она меньше касательной силы тяги на величину сил сопротивления качению ведущего колеса. Величина этой силы ограничивается, с одной стороны, составляющей реакции почвы Xk, направленной в сторону движения, а с другой касательной силой Рк, развиваемой двигателем. Таким образом, величина движущей агрегат силы ограничивается не только значением касательной силы тяги, но и сцеплением движителей с почвой.
На ведущее колесо влияет большое количество факторов, определяющих его сцепление с почвой, притом изменяющихся случайным образом. Это значительно затрудняет процесс определения сцепных свойств. В связи с этим для упрощения расчетов по определению значения движущей силы вводится понятие коэффициента сцепления μ, который представляет отношение силы F к сцепному весу трактора Gсц:
Значения μ для различных оснований, по которым движется трактор, приведены в соответствующих справочниках.
В связи с этим движущую агрегат силу, ограничиваемую сцеплением с почвой Fc, можно определить по формуле:
где Gсц – сцепной вес трактора.
В эксплутационных расчетах эту силу называют силой сцепления, под которой понимают максимальное значение параллельного пути реакции почвы, обеспечивающей поступательное движение.
где m — эксплутационная масса трактора; λ — коэффициент показывающий какая часть веса трактора нагружает ведущие колеса (движители). Для гусеничных тракторов и колесных со схемой 4×4 λ=1, для колесных со схемой 4×2 — λ=0,65-0,7.
В качестве номинального принимают такое значение μн, которое обеспечивает образование движущей силы при буксовании движителей, не превышающих допустимых значений: для колесных тракторов до 14 — 15%, для гусеничных — до 6-7%.
Максимальное значение Fс соответствует такому μмах, при котором буксование движителей близко к 100%.
Таким образом, движущая агрегат сила при условии Fc≥Pk определяется величиной касательной силы тяги, а при условии Fc
Отсюда легко появляется понятие тягового усилия трактора Ркр для равномерного движения при сопротивлении воздушной среды Рв=0.
На тягу будет расходоваться та наименьшая из возможных в данных условиях движущий агрегат сил за вычетом сил сопротивления движению самого трактора.
В теоретическом плане сопротивление передвижению трактора складывается из двух частей – сопротивления качению ведущих колес в виде момента Мfk, преодолеваемого моментом Мk до образования движущей силы, и сопротивления движению трактора (Рf±Pα), преодолеваемого движущей силой до образования тягового усилия. Однако даже в эксперименте очень трудно разделить Мfk и Рf, поэтому в практических расчетах их считают вместе, только по одному коэффициенту сопротивления движению трактора f. Этим как бы численно уравнивают движущую силу F и касательную силу тяги Рk, то есть F=Pk.
Пользуясь уравнением тягового баланса трактора (4.19) для равномерного движения (Рj=0) при отсутствии сопротивления воздушной среды (Рв=0), получим выражение для определения силы тяги трактора Ркр
По формуле (4.20) можно определить тяговые усилия, которые может развить трактор в данных условиях (f, i) на всех передачах (im, ηм).
Виды сопротивления машин
ЛЕКЦИЯ 5
Дисциплина: «Машиноиспользование в СК»
Продолжительность: 1 час
Сопротивление сельскохозяйственных машин
Виды сопротивления машин
Анализ рабочих сопротивлений машин
Методика расчета составляющих баланса сил сопротивления машин
Коэффициент полезного действия сельскохозяйственных машин и агрегатов
Пути снижения сопротивления машин
Виды сопротивления машин
Работа машинно-тракторного агрегата может совершаться лишь в том случае, если величина движущей силы, определяемая мощностью двигателя и режимом работы (при достаточном сцеплении движителей энергетического средства с почвой) будет достаточна для преодоления сил сопротивления, действующих на агрегат (Лекция 2). Как правило, при нормальных условиях использования агрегатов основную величину в структуре этих сил при выполнении технологических процессов составляет сопротивление сельскохозяйственных машин. Его величина в конкретных условиях использования агрегатов определяет их состав и режим работы.
Сопротивление рабочих машин у мобильных агрегатов подразделяется на сопротивление холостого хода (Rхх) и рабочее сопротивление (Rм).
Холостое сопротивление машин возникает при переездах, поворотах агрегатов, а для машин с приводом активных рабочих органов (комбайны, фрезы, косилки и др.) – при их прокручивании без обрабатываемого материала.
Рабочее сопротивление машин создается при выполнении агрегатом технологических процессов. В зависимости от вида технологического процесса, конструкции машин и способов передачи энергии к их рабочим органам рабочее сопротивление можно подразделить на три основные группы.
 1. Тяговое сопротивлениеоказывают машины, поступательное движение которых используется для технологического воздействия на обрабатываемую среду (предмет воздействия) – почву или растения. Сюда относятся почвообрабатывающие орудия: плуги, культиваторы, бороны и др., а также некоторые уборочные машины – волокуши, грабли поперечные и др. Так как машина перемещается по полю, в рабочее тяговое сопротивление (полностью или частично) войдет и сопротивление машины движению:
1. Тяговое сопротивлениеоказывают машины, поступательное движение которых используется для технологического воздействия на обрабатываемую среду (предмет воздействия) – почву или растения. Сюда относятся почвообрабатывающие орудия: плуги, культиваторы, бороны и др., а также некоторые уборочные машины – волокуши, грабли поперечные и др. Так как машина перемещается по полю, в рабочее тяговое сопротивление (полностью или частично) войдет и сопротивление машины движению:
Разновидностью тягового сопротивления является сопротивление, которое образуют машины, выполняющие часть операций технологического процесса посредством рабочих органов и механизмов с приводом от ходовых колес машины (сеялки, прицепные косилки, комбинированные культиваторы и др.). Тяговое сопротивление машин этой группы определяется усилием, необходимым на передвижение машины, на протаскивание пассивных рабочих органов в обрабатываемой среде, на привод механизмов машины от ходового колеса, нагруженного ведомым моментом.
2.Приводное сопротивлениеоказывают машины, технологический процесс которых осуществляется посредством активных рабочих органов, механизмов, приводящихся от двигателя самоходной машины (комбайны) или трактора (агрегаты с навесными машинами–косилками, фрезами и др.) через различные передаточные устройства (ВОМ, вариатор, гидро-, электроприводы). В этих случаях приводное сопротивление

где Rпр.х, Rтехн – сопротивление холостого хода активных рабочих органов и их сопротивление при выполнении технологического процесса соответственно, кН.
Сила сопротивления передвижению этих машин входит в силу сопротивления перекатыванию самоходной машины. Сюда же входит относительно небольшое усилие, которое необходимо для преодоления лобового сопротивления обрабатываемой среды.
3. Тягово-приводное сопротивлениеобразуется при работе мобильных агрегатов с машинами, которые имеют пассивные и активные рабочие органы, приводимые от различных передаточных устройств. Общее сопротивление машин таких агрегатов состоит из сил сопротивления передвижению машин, сопротивления пассивных и активных рабочих органов:
 |
Для комплектования машинно-тракторных агрегатов наибольшее значение имеет рабочее сопротивление машин, соотношение которого с тяговым усилием трактора или приводными силами определяет количество машин в агрегате, скорость его движения, ширину захвата и пропускную способность приводных машин.
Первая группа сопротивлений машин(тяговые) зависит от многих факторов, в том числе от типа и состояния машины, выполняемой работы, скорости движения, типа и состояния почвы, рельефа и др.
Приводная группа сопротивленийзависит от физико-механических свойств и количества перерабатываемого материла, поступающего на рабочие органы машин в единицу времени, и конструкции рабочих органов.
Потребная мощность двигателя трактора(самоходной машины), идущая на преодоление этих сопротивлений, у тягово-приводных агрегатов ограничивается предельной пропускной способностью основных агрегатов машин, а также необходимостью иметь достаточный запас мощности для преодоления тяговых сопротивлений. Затраты мощности на привод современных машин изменяются в широких пределах (3…40 кВт).
Величина холостого сопротивления машин зависит от конструкции машины (массы, типа ходового аппарата и др.) и условий эксплуатации (состояния поверхности поля, состава почвы, ее влажности, технического состояния механизмов ходового аппарата и др.).
Дата добавления: 2015-10-05 ; просмотров: 3535 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ







