- Способы регулировки оборотов вращения асинхронных двигателей
- Что такое асинхронный двигатель?
- Двигатели с короткозамкнутым ротором (АДКР)
- Двигатели с фазным ротором
- Принцип работы и число оборотов асинхронных двигателей
- Способы изменения оборотов двигателя
- Типичные схемы регуляторов оборотов
- РЕГУЛЯТОР МОЩНОСТИ ДЛЯ 3 ФАЗНОГО МОТОРА
- Схема регулятора
- Органы управления
- Основные параметры
- Простой регулятор скорости вращения электродвигателя
Способы регулировки оборотов вращения асинхронных двигателей
Достаточно часто режим работы вспомогательного механизированного оборудования требует понижения штатных частот вращения. Добиться такого эффекта позволяет регулировка оборотов асинхронного двигателя. Как это сделать своими руками (расчет и сборку), используя стандартные схемы управления или самодельные устройства, попробуем разобраться далее.
Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».

Двигатели с фазным ротором
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.

Принцип работы и число оборотов асинхронных двигателей
Данный вопрос рассмотрим на примере АДКР, как наиболее распространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, каждая из трех фаз которой смещена геометрически на 120°. После подачи напряжения возникает магнитное поле, создающее путем индукции ЭДС и ток в обмотках ротора. Последнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а именно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
n = 60f / p, об/мин
где f – частота сетевого напряжения, Гц, р – число полюсных пар статора.
Все технические характеристики указываются на металлической табличке, закрепленной на корпусе. Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:
- Расчет количества катушек. Полученное значение сопоставляется с действующими нормами для напряжения 220 и 380В (см. табл. ниже),
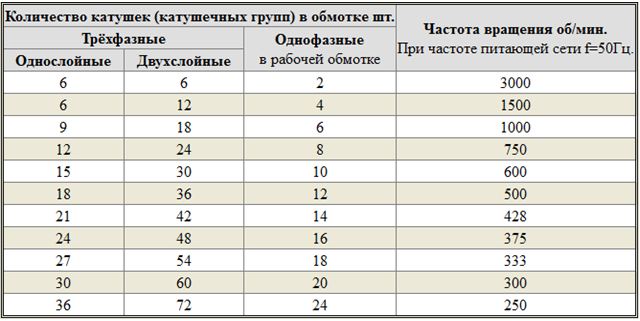
- Расчет оборотов с учетом диаметрального шага обмотки. Для определения используется формула вида:
где 2p – число полюсов, Z1 – количество пазов в сердечнике статора, y – собственно, шаг укладки обмотки.
Стандартные значения оборотов:

- Расчет числа полюсов по сердечнику статора. Используются математические формулы, где учитываются геометрические параметры изделия:
2p = 0,35Z1b / h или 2p = 0,5Di / h,
где 2p – число полюсов, Z1 – количество пазов в статоре, b – ширина зубца, см, h – высота спинки, см, Di – внутренний диаметр, образованный зубцами сердечника, см.
После этого по полученным данным и магнитной индукции нужно определить количество витков, которое сверяется с паспортными данными двигателей.
Способы изменения оборотов двигателя
Регулировка оборотов любого трехфазного электродвигателя, используемого в подъемно-транспортной технике и оборудовании, позволяет добиться требуемых режимов работы точно и плавно, что далеко не всегда возможно, например, за счет механических редукторов. На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
- Изменение скорости магнитного поля в статоре. Достигается за счет частотного регулирования, переключения числа полюсных пар или коррекции напряжения. Следует добавить, что эти методы применимы для электродвигателей с короткозамкнутым ротором,
- Изменение величины скольжения. Этот параметр можно откорректировать за счет питающего напряжения, подключения дополнительного сопротивления в электрическую цепь ротора, применения вентильного каскада или двойного питания. Используется для моделей с фазным ротором.
Наиболее востребованными методами являются регулирование напряжения и частоты (за счет применения преобразователей), а также изменение количества полюсных пар (реализуется путем организации дополнительной обмотки с возможностью переключения).
Типичные схемы регуляторов оборотов
На рынке сегодня есть широкий выбор регуляторов и частотных преобразователей для асинхронных двигателей. Тем не менее, для бытовых нужд подъемного или обрабатывающего оборудования вполне можно сделать расчет и сборку на микросхеме самодельного прибора на базе тиристоров или мощных транзисторов.
Ниже представлен пример схемы достаточно мощного регулятора для асинхронного двигателя. За счет чего можно добиться плавного контроля параметров его работы, снижения энергопотребления до 50%, расходов на техническое обслуживание.
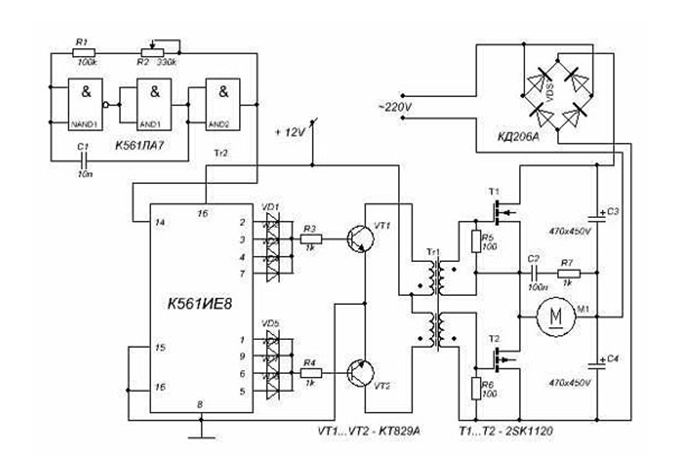
Данная схема является сложной. Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:
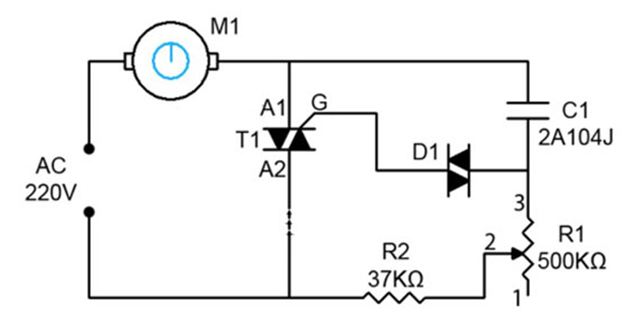
Обороты электродвигателя будут регулироваться за счет потенциометра, который определяет фазу входного импульса, открывающего симистор.
Как можно судить из информации, представленной выше, от оборотов асинхронного двигателя зависят не только параметры его работы, но и эффективность функционирования питаемого подъемного или обрабатывающего оборудования. В торговой сети сегодня можно приобрести самые разнообразные регуляторы, но также можно совершить расчет и собрать эффективное устройство своими руками.
РЕГУЛЯТОР МОЩНОСТИ ДЛЯ 3 ФАЗНОГО МОТОРА
Цифровой регулятор мощности для 3 фазного мотора переменного тока выполнен с использованием специальной микросхемы MC3PHAC от фирмы NXP Semiconductor. Она генерирует 6 ШИМ-сигналов для 3 фазного двигателя переменного тока. Блок легко совмещается с мощным 3 фазным IGBT/MOSFET ключевым приводом. Плата обеспечивает 6 ШИМ сигналов для IPM или IGBT инвертора, а также сигнал торможения. Схема работает в автономном режиме и не требует программирования и кодирования.
Схема регулятора

Органы управления
- PR1: Потенциометр для установки ускорения
- PR2: Потенциометр для регулировки скорости
- SW1: Переключатель DIPX4 для установки частот 60Hz/50Hz и установки выхода активный низкий / активный высокий
- SW2: Переключатель сброса
- SW3: Старт / стоп мотор
- SW4: изменить направление двигателя

Основные параметры
- Питание драйвера 7-15 В постоянного тока
- Потенциометр для управления скоростью двигателя
- Частота ШИМ по умолчанию 10.582 кГц (5.291 кГц – 164 кГц)
М/с MC3PHAC — это монолитный интеллектуальный контроллер, разработанный специально для удовлетворения потребности в недорогих 3-фазных системах управления электродвигателем переменного тока с регулировкой скорости вращения. Устройство адаптируется и настраивается в зависимости от его параметров. Оно содержит все активные функции, необходимые для реализации части управления с открытым контуром. Всё это делает MC3PHAC идеально подходящей для устройств, требующих поддержки управления двигателем переменного тока.

В состав MC3PHAC входят защитные функции, состоящие из контроля напряжения шины постоянного тока и входа неисправности системы, которые немедленно отключат модуль ШИМ при обнаружении неисправности системы.
Все выходные сигналы TTL уровня. Вход для блока питания 5-15 В постоянного тока, постоянное напряжение на шине должно быть в пределах 1.75 — 4,75 вольта, DIP-переключатель предусмотрен на плате для установки под двигатели с частотой 60 или 50 Гц, перемычки помогают установить полярность выходного ШИМ-сигнала, то есть активный низкий или активный высокий уровень, что позволяет использовать эту плату в любом модуле, так как выход можно установить активный низкий или высокий. Потенциометр PR2 помогает регулировать скорость двигателя. Для изменения базовой частоты, времени отключения ШИМ, других возможных параметров — изучайте даташит. Файлы платы — в архиве

Управление скоростью. Синхронная частота электродвигателя может быть задана в режиме реального времени для любого значения от 1 Гц до 128 Гц регулировкой потенциометра PR2. Коэффициент масштабирования составляет 25,6 Гц на вольт. Обработка 24-битным цифровым фильтром для того чтобы увеличить стабильность скорости.
Управление ускорением. Ускорение двигателя может быть задано в режиме реального времени в диапазоне от 0,5 Гц/сек до 128 Гц/сек, путем регулировки потенциометра PR1. Коэффициент масштабирования составляет 25,6 Гц/секунду на вольт.
Защита. При возникновении неисправности MC3PHAC немедленно отключает ШИМ и ожидает, пока условие неисправности не будет устранено перед запуском таймера для повторного включения. В автономном режиме этот интервал времени ожидания задается на этапе инициализации путем подачи напряжения на вывод MUX_IN, в то время как вывод RETRY_TxD управляется на низком уровне. Таким образом, время повтора может быть указано от 1 до 60 секунд с коэффициентом масштабирования 12 секунд на вольт.
Контроль внешних неисправностей. Вывод FAULTIN принимает цифровой сигнал, указывающий на неисправность, обнаруженную с помощью внешних цепей мониторинга. Высокий уровень на этом входе приводит к немедленному отключению ШИМ. Как только этот вход возвращается к низкому уровню логики, таймер повтора сбоя начинает работать, и ШИМ повторно включается после достижения запрограммированного значения тайм-аута. Входной контакт 9 разъема CN3 FLTIN должен быть с высоким потенциалом.
Мониторинг целостности напряжения (входной сигнал pin 10 в cn3) в DC_BUS отслеживается на частоте 5.3 кГц (4.0 кГц, если частота ШИМ имеет значение до 15,9 кГц). В автономном режиме пороги фиксируются на 4.47 вольт (128% от номинальной), и 1,75 вольт (50% от номинальной), где номинальное значение определяется в 3,5 вольт. Как только уровень сигнала DC_BUS возвращается к значению в пределах допустимого — таймер повтора сбоя начинает работать, и ШИМ снова включается после достижения запрограммированного значения тайм-аута.
Регенерация. Процесс экономии, с помощью которого сохраненная механическая энергия в двигателе и нагрузке переносятся обратно в привод электроники, происходит это как правило, в результате принудительного замедления. В особых случаях, когда этот процесс происходит часто (например, системы управления двигателями лифтов), он включает специальные функции, чтобы позволить этой энергии перейти обратно в сеть переменного тока. Однако для большинства недорогих приводов переменного тока эта энергия сохраняется в конденсаторе шины постоянного тока за счет увеличения ее напряжения. Если этот процесс не установлен, напряжение шины постоянного тока может подниматься до опасного уровня, что может привести к порче конденсатора шины или транзисторов в инверторе питания. MC3PHAC позволяет автоматизировать и стабилизировать этот процесс.
Резистивное торможение. DC_BUS пин-код отслеживается на 5.3 кГц (4.0 кГц, если частота ШИМ имеет значение до 15,9 кГц), и когда напряжение достигает определенного порога, RBRAKE контакт примет высокий потенциал. Этот сигнал может использоваться для управления резистивным тормозом, размещенным через конденсатор шины постоянного тока, таким образом, механическая энергия от двигателя будет рассеиваться в виде тепла в резисторе. В автономном режиме порог DC_BUS, необходимый для подтверждения сигнала RBRAKE, зафиксирован на уровне 3,85 вольта (110 % номинала), где номинал определяется как 3,5 вольта.

Выбор частоты ШИМ. У MC3PHAC имеется четырех дискретных частоты ШИМ, которые могут быть динамически изменены во время вращения электродвигателя. Этот резистор может быть потенциометром или фиксированным резистором в диапазоне, показанном в таблице. Частота ШИМ определяется подачей напряжения на контакт MUX_IN в то время как контакт ШИМ FREQ_RxD управляется низким потенциалом.
Простой регулятор скорости вращения электродвигателя
Внимание! Данным материалом руководствоваться не стоит, т.к. в нем много ошибок, неточностей и путаницы. Подробнее об этом здесь
Очень часто, при реализации технологического процесса, возникает необходимость уменьшить производительность агрегатов или механизмов с электродвигателем. Причем это уменьшение бывает вызвано не столько экономией электроэнергии, сколько требованиями выполнения качества самого тех. процесса. От насосов, компрессоров, вентиляторов и пр. требуется не максимум того, что они могут выдать, а только необходимый объем. Мы не собираемся здесь обсуждать регулирование частоты электродвигателей свыше их номинальной частоты вращения, поскольку в этом случае возникает необходимость в применении частотного преобразователя. Будем рассматривать только те случаи, когда есть возможность и необходимость понижения частоты вращения ( и ,как следствие, производительности) при сохранении, по возможности, его момента вращения.
Поводом для написания статьи послужил случай. Занимаясь схемой управления двигателем от Arduino с использованием стандартной функцией AnalogOutput я с удивлением обнаружил, что если применять эту функцию совместно с твердотельным реле типа MOC3083 или аналогичным, с переключением при переходе через ноль, то скорость вращения вентиляторного двигателя регулируется довольно неплохо. Это казалось странным, поскольку частота ШИМ у Arduino, была довольно высока — порядка 1000Гц, по сравнению с частотой сети 50Гц. Поэтому возникло желание проверить эту идею для простых схем на базе стандартной логики [1].
Возьмем, для начала, за основу схему рис.1 из статьи: http://cxem.net/pitanie/5-313.php и модифицируем ее таким образом, чтобы была возможность управления симистором не с помощью оптопары MOC3023, а оптопарой со встроенной схемой переключения при переходе напряжения через ноль, например: MOC 3083. ШИМ – генератор DD1.2 модулятор, также модифицируем, таким образом, чтобы его частота была выше 100Гц, например, около 1400Гц. Подключив теперь в качестве нагрузки электродвигатель имеем возможность регулировать его частоту вращения. Что здесь реально происходит? В зависимости от положения потенциометра мы определяем процентное соотношение логического нуля и единицы на выходе ШИМ –генератора DD1.2 .в
Чем больше процент нулевого уровня , тем выше вероятность пропуска импульса синхронизации сети схемой совпадения на DD1.1 на управление оптопарой MOC3083. Схема работает как бы по случайному закону с равномерным распределением вероятности. Мы получили как бы стохастическую схему, работающую на основе нечеткой логики (англ. fuzzy logic), работа которой напоминает игру в кости: когда вероятность выпадания определенного значения равновероятно и равно 1/6, что соответствует 1/6 соотношения нуля и единицы в ШИМ генераторе. Схема, достаточно плавно, регулирует скорость вращения коллекторных электродвигателей с фазным ротором и асинхронных однофазных двигателей с фазосдвигающим конденсатором. В последнем случае необходимо уточнить, что асинхронный двигатель должен быть разработан именно для однофазного применения. В случае использования трехфазного мотора, приспособленного под однофазную сеть (путем включения в цепь одной из обмоток фазосдвигающего конденсатора) вращение может начаться только на номинальной частоте. Это справедливо и для некоторых однофазных асинхронных двигателей, например от старых советских стиральных машин, в которых предусматривалось подключение на время пуска дополнительного пускового конденсатора (и для этой цели существовал даже специальный выключатель).
Почему я не выбрал для схемы более простой вариант типа диммера? Здесь будет уместно повторить тезисы из статьи http://cxem.net/pitanie/5-313.php
1. Благодаря пропуску целых полупериодов напряжения не возникают резкие переходные процессы, которые часто приводят в помехам в питающей сети и в эфире.
2. Силовой симистор находится в более благоприятной зоне регулирования (при переходе сетевого напряжения через 0)и, следовательно, имеет меньше вероятности выйти из строя.
Также напрашивается и такой аргумент в пользу использования регулирования количеством полных периодов : как и в случаях применения частотных преобразователей, при уменьшении частоты должно уменьшаться и напряжение. В случае импульсно фазового управления, напротив, при уменьшении напряжения спектр частот результирующего напряжения «обогащается» высокочастотными гармониками. Эти высшие гармоники, по–видимому, приводят лишь к дополнительному разогреву электродвигателя.
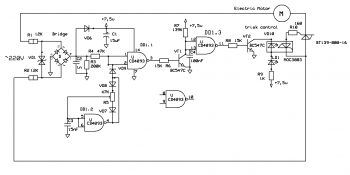
Если же опираться не только на нечеткую логику, то можно предположить, что лучше было бы выполнять коммутацию не в течение полупериода, а охватить период сетевого напряжения (т.е. длительностью промежутка в 20мс). Для этой цели служит одновибратор на элементе DD1.3, который перезапускается всякий раз удачно прошедшим схему совпадения DD1.1 импульсом синхронизации. Длительность импульса одновибратора выбирается в пределах 15мс, для того, чтобы включались любые два смежных полупериода, с целью надежного перемагничивания магнитопровода статора. Ещё большее значение этот фактор имеет в случае управления трехфазными машинами. Включающий импульс должен в этом случае длиться в течение всего цикла кругового электромагнитного поля трехфазного двигателя, что составит примерно 25мс. Однофазный вариант регулятора представлен на фотографии.
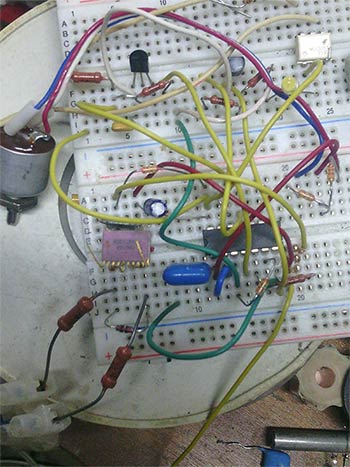
Это фрагмент платы для макетирования без пайки, применение которой, по моим прикидкам, увеличивает скорость отладки схем в 4—5 раз. Схема регулятора скорости для трехфазного двигателя представлена на рис.2 .
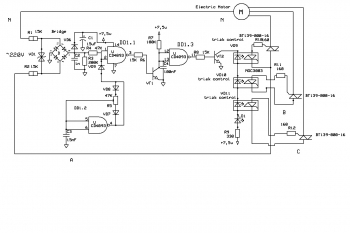
Практическая проверка данного варианта, ввиду отсутствия трехфазного напряжения 220/380В не проводилась.
Для любителей схем с микроконтроллерами можно рекомендовать обратить внимание на схемы, реализующие алгоритм Брезенхема. Здесь также задача сводится к минимизации интервалов отсутствия подачи питания на электродвигатель, но путем определенного алгоритма жесткой логики. Пример подобной схемы есть на http://kazus.ru/shemes/showpage/0/896/1.html., предполагая, конечно, использование MOC3083 или аналогичной. Правда, использование в ней микроконтроллера серии AT89C2051 может вызывать трудности в виду того, что для загрузки кода требуется специальный программатор, а также того, что данный тип микроконтроллеров постепенно уходит с авансцены массового применения.
Список литературы:
1. С.А. Бирюков, Цифровые устройства на КМОП интегральных микросхемах, Москва «Радио и связь» 1996







