- Схемы управления электродвигателями
- Подписка на рассылку
- Основные схемы управления асинхронным электродвигателем
- Регулятор оборотов электродвигателя: назначение, принцип работы
- Назначение
- Принцип работы
- Как выбрать?
- Подключение
- Схема Управления Электрическим Двигателем
- Наша группа «ВКонтакте»
- Типовые схемы управления электроприводами с асинхронными двигателями
- Поиск по блогу
- Схемы управления электроприводами
- Также рекомендуем прочесть
Схемы управления электродвигателями
Подписка на рассылку
 Современное оборудование часто работает в автоматическом и полуавтоматическом режиме. Это позволяет исключить пресловутый человеческий фактор, увеличить объемы и темпы производимых операций, сделать производство более рентабельным. Одним из главных факторов надежной работы современного оборудования является безупречное выполнение включения электродвигателей, которое выполняется в заданной последовательности и с соблюдением штатного режима работы. Схемы управления электродвигателями могут быть различны, так как принципы автоматического и полуавтоматического режима работы могут существенно отличаться друг от друга.
Современное оборудование часто работает в автоматическом и полуавтоматическом режиме. Это позволяет исключить пресловутый человеческий фактор, увеличить объемы и темпы производимых операций, сделать производство более рентабельным. Одним из главных факторов надежной работы современного оборудования является безупречное выполнение включения электродвигателей, которое выполняется в заданной последовательности и с соблюдением штатного режима работы. Схемы управления электродвигателями могут быть различны, так как принципы автоматического и полуавтоматического режима работы могут существенно отличаться друг от друга.
Полуавтоматическое управление предусматривает участие оператора, который инициирует пуск оборудования нажатием соответственной кнопки или поворачивая рычаг. После этого функция персонала заключается лишь в контроле рабочего процесса. При автоматическом управлении первоначальный пуск оборудования осуществляют реле или датчики, после чего работы выполняется в соответствие с заданными программами. Такое программное устройство часто выполняется с помощью логических схем, вариантов которых может быть довольно много. В промышленности наиболее часто встречаются следующие схемы управления асинхронными электродвигателями:
• нереверсивного управления;
• реверсивного управления с двумя магнитными пускателями.
Основные схемы управления асинхронным электродвигателем
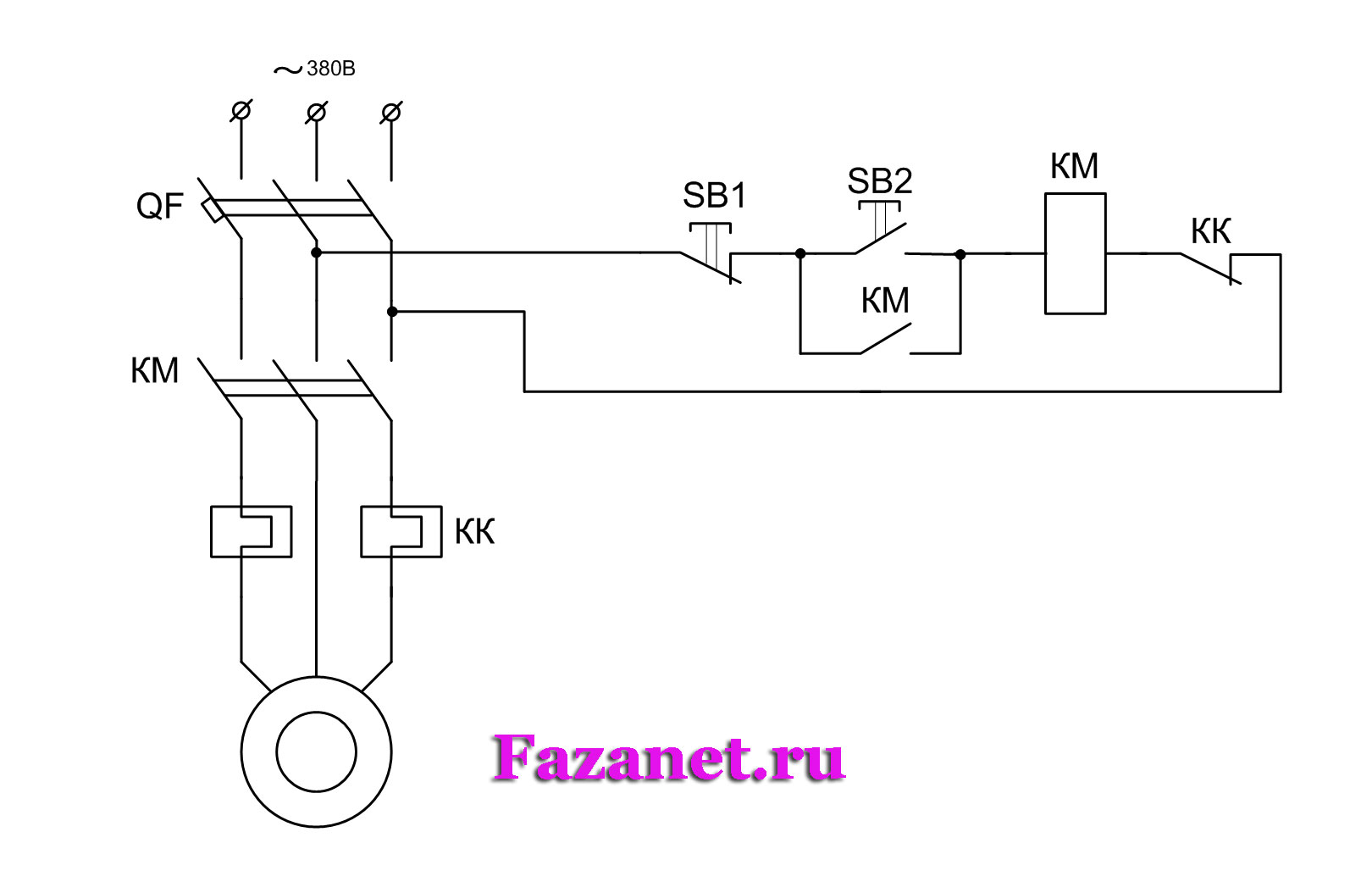
При использовании схемы управления электродвигателем с нереверсивным управлением после пуска происходит подключение к сети электромагнитной катушки. С ее сердечником соприкасается подвижный якорь и замыкает силовые контакты. В результате на двигатель подается трехфазное напряжение. Параллельно с силовыми контактами замыкаются блокировочные, что позволяет зашунтировать кнопку пуска и отпустить ее. Нажимая кнопку стоп, оператор тем самым разрывает цепь, от которой запитана электромагнитная катушка. Это освобождает якорь, который при падении размыкает силовые контакты, что приводит к остановке оборудования. В этой схеме управления защита от длительной перегрузки обеспечивается подключением к двум фазам тепловых реле.
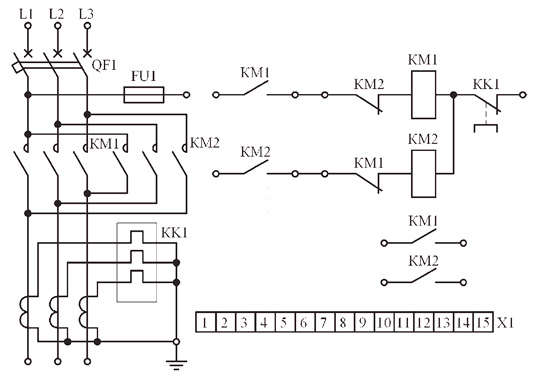
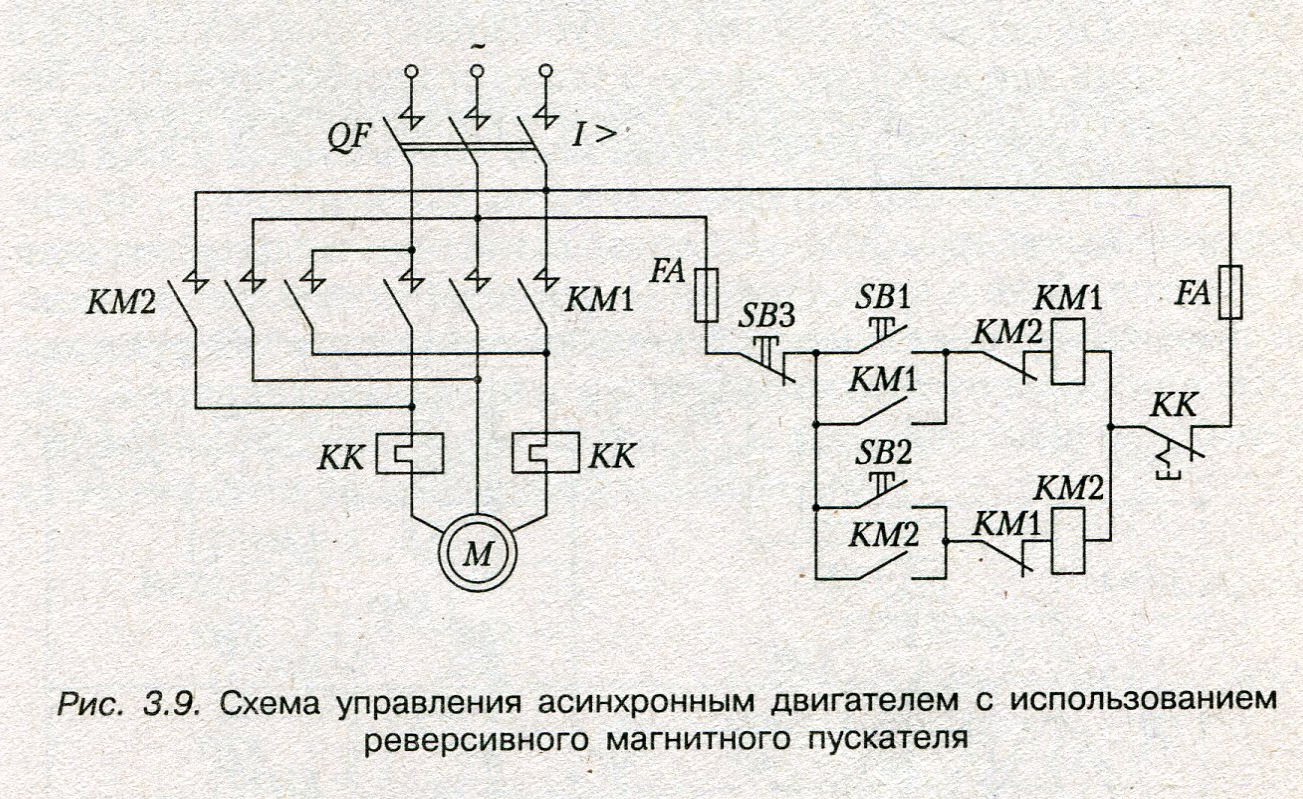
Схема управления реверсивным электродвигателем имеет два магнитных пускателя. Один из них соединяет схему включения на прямое вращение, а второй – на обратное включение. Кнопками «вперед» и «назад» подключаются те электромагнитные катушки, которые отвечают за соответствующую операцию. Реверсивные пускатели состоят из двух нереверсивных пускателей, имеют механическую блокировку, исключающую одновременное включение. Остановка двигателя включена в общую цепь управления.
Схемы управления электродвигателями постоянного тока и синхронными двигателями
Схема управления электродвигателем постоянного тока может быть следующих видов:
• с нижним расположением ключа;
• с верхним расположением ключа;
• мостовая схема.
Все они базируются на принципах ШИМ и основных характеристиках двигателя. Наиболее экономичной схемой является с нижним расположением ключа, его верхнее расположение используют при повышенных требованиях к безопасности. Мостовая схема используется при реверсивном управлении двигателем.
Синхронные двигатели сложнее асинхронных, но они менее чувствительны к колебаниям напряжения и более устойчивы к перегрузкам. Это стало причиной их широкого распространения. Схема управления синхронным электродвигателем обычно включается в себя тиристорные возбудители, которые заменили электромашинные возбудители, долгое время являвшиеся уязвимым местом этого типа электромоторов.
Регулятор оборотов электродвигателя: назначение, принцип работы
В большинстве современных бытовых и промышленных приборов применяются электрические машины, совершающие какую-либо полезную работу. В качестве рабочего инструмента в них могут выступать самые разнообразные приспособления, которые необходимо вращать с различной скоростью. Для изменения этого параметра используется регулятор оборотов электродвигателя.
Назначение
Технически регулятор оборотов электродвигателя предназначен для изменения количества вращения вала за единицу времени. На этапе разгона корректировка частоты обеспечивает более плавную процедуру, меньшие токи и т.д. В некоторых технологических процессах необходимо регулятор оборотов снижает скорость движения оборудования, изменение подачи или нагнетания сырья и т.д.
Однако на практике данная опция может преследовать и другие цели:
- Экономия затрат электроэнергии – позволяет снизить потери в моменты пуска и остановки вращений мотора, переключения скоростей или регулировки тяговых характеристик. Особенно актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы.
- Контроль температурного режима, величины давления без установки обратной связи с рабочим элементом или с таковой в асинхронных электродвигателях.
- Плавный пуск – предотвращает бросок тока в момент включения, особенно актуально для асинхронных моторов с большой нагрузкой на валу. Приводит к существенному сокращению токовых нагрузок на сеть и исключает ложные срабатывания защитной аппаратуры.
- Поддержание оборотов трехфазных электродвигателей на требуемой отметке. Актуально для точных технологических операций, где из-за колебаний питающего напряжения может нарушиться качество производства или на валу возникает разное усилие.
- Регулировка скорости оборотов электродвигателя от 0 до максимума или от другой базовой скорости.
- Обеспечения достаточного момента на низких частотах вращения электрической машины.
Возможность реализации тех или иных функций у регуляторов оборотов определяет как принцип их действия, так и схематическое исполнение.
Принцип работы
Для регулировки оборотов может использоваться способ понижения или повышения напряжения, изменение силы тока и частоты, подаваемых в обмотки асинхронных и коллекторных электродвигателей. Поэтому далее рассмотрим варианты частотных преобразователей и регуляторов напряжения.
Среди используемых в промышленной и бытовой сфере следует выделить:
- Введение рабочего сопротивления – реализуется при помощи переменных резисторов, делителей и прочих преобразователей. Хорошо обеспечивает снижение в однофазных двигателях за счет контроля скольжения (разницы между магнитным полем статора и скоростью вращения асинхронных агрегатов). Для этого устанавливаются электродвигатели большей мощности, чтобы на них можно было подавать меньшее напряжение. Соотношение по скорости оборотов будет составлять до 2 раз в сторону уменьшения.
- Автотрансформаторный – выполняется путем перемещения подвижного контакта по обмотке, что снижает или увеличивает скорость вращения электродвигателя. Преимущество такого принципа заключается в четкой синусоиде переменного тока и большой перегрузочной способности.
- Тиристорный или симисторный – изменяет величину питающего напряжения посредством пары встречно включенных тиристоров или совместного включения с симистором. Этот способ применим не только в асинхронных двигателях, но и других бытовых приборах – диммерах, переключателях и т.д.
 Рис. 1. Схема тиристорного регулятора
Рис. 1. Схема тиристорного регулятора
Как видите на схеме, подаваемое на тот же асинхронный однофазный электродвигатель напряжение, проходит через переменный резистор R1 на тиристор D1 и на управляющий электрод симистора T1. Перемещая ручку тиристорного регулятора R1 изменяем и скорость вращения однофазного электродвигателя.
- Транзисторный – позволяет изменять форму подаваемого напряжения за счет преобразования числа импульсов и временной паузы между подаваемым напряжением. Благодаря чему получил название широтно-импульсной модуляции, пример такого регулятора приведена на схеме ниже.
 Регулировка оборотов на транзисторах
Регулировка оборотов на транзисторах
Здесь питание однофазного асинхронного двигателя производится от линии 220В через выпрямительный блок VD1-4, далее напряжение поступает на эмиттер и коллектор транзисторов VT1 и VT2. Подавая управляющий сигнал на базы этих транзисторов, и регулируют обороты мотора.
- Частотный – преобразует частоту подаваемого напряжения на обмотки однофазного или трехфазного асинхронного электродвигателя. Это наиболее современный способ, ранее он относился к дорогостоящим, но с появлением дешевых высоковольтных полупроводников и микроконтроллеров перешел в разряд наиболее эффективных. Может реализовываться с помощью транзисторов, микросхем или микроконтроллеров, способных уменьшать или увеличивать частоту ШИМ.
 Пример частотного регулирования
Пример частотного регулирования
- Полюсный – позволяет регулировать частоту вращения электродвигателя при переключении количества катушек в фазных обмотках, в результате чего изменяется направление и величина тока, протекающего в каждой из них. Реализуется как за счет намотки нескольких катушек для каждой из фаз, так и одновременным последовательным или параллельным соединением катушек, такой принцип приведен на рисунке ниже.
 Регулировка оборотов переключением пар полюсов
Регулировка оборотов переключением пар полюсов
Как выбрать?
Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения.
Помимо этого для регулятора оборотов необходимо выбрать:
- Тип управления – выделяют два способа: скалярный и векторный. Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
- Мощность – должна выбираться не менее или даже больше, чем номинал подключаемого электродвигателя на максимальных оборотах, желательно обеспечивать запас, особенно для электронных регуляторов.
- Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению.
- Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин.
- Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если под регулятор оборотов будет использоваться соответствующая ниша или разъем, то размеры подбираются в соответствии с величиной свободного пространства.
Подключение
Способ подключения регулятора оборотов электродвигателя будет отличаться в зависимости от его типа и принципа действия. Поэтому в качестве примера мы разберем один из наиболее распространенных частотных регуляторов, которые используются в самых различных сферах.
Перед подключением обязательно ознакомьтесь с заводской схемой. Как правило, вы можете увидеть ее на самом регуляторе оборотов, либо в паспорте устройства:
 Схема подключения регулятора
Схема подключения регулятора
Далее, пользуясь распиновкой, можно определить количество выводов, которые будут использоваться для подключения регулятора электродвигателя к сети. В нашем примере, рассмотрим случай, когда применяется трехпроводная система, значит, понадобится фаза, ноль и земля. На задней панели регулятора это два вывода AC и FG:
 Распиновка регулятора
Распиновка регулятора
Затем необходимо проверить цветовую маркировку разъема с приведенной схемой и сопоставить ее со всеми элементами электродвигателя, которые будут подключаться в вашем случае. Если какие-то выводы окажутся лишними, их можно закоротить, как показано на рисунке выше.
 Проверьте цветовую маркировку
Проверьте цветовую маркировку
Если все выводы регулятора соответствуют клеммам электродвигателя, можете подсоединять их друг к другу и к сети.
Схема Управления Электрическим Двигателем
После восстановления нормального напряжения самопроизвольного пуска двигателя не произойдет. Типовые схемы управления АДс фазным ротором.

Схема управления асинхронным двигателем с использованием динамического торможения. 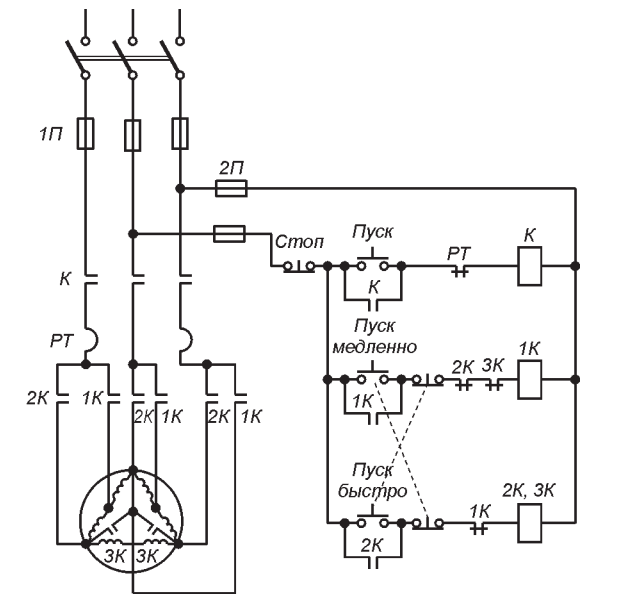
Переключение обмотки на роторе происходит при помощи графитовых щеток, единовременно под напряжением находится только одна из рамок, с магнитным полем, перпендикулярным полю статорной обмотки. При достижении заданного уровня реле снова сработает и разомкнет контакт РДmax.
Схемы управления магнитным пускателем
Контактор К обеспечивает минимальную защиту по напряжению.

Остановка двигателя производится нажатием кнопки SВ3, что вызовет отключение всех контакторов от сети и торможение двигателя выбегом.
Начинается процесс торможения двигателя выбегом под действием момента нагрузки на его валу. На рис.
Это асинхронные двигатели с однофазным или трехфазным питанием и коллекторные устройства.
Сервопривод Устройство позволяет точно контролировать угловое положение, скорость и ускорение исполнительного механизма посредством управления синхронным электродвигателем обычно СДПМ. Регулирование скорости рабочего органа машины или механизма.

схема подключения двигателя по реверсивной схеме
Наша группа «ВКонтакте»
К недостаткам можно отнести риск короткого замыкания при подаче на два входа; двойным H-мостом, собранным на маломощной микросхеме. Но реле не сразу отпускает свой якорь, это произойдет после истечения выдержки времени. Автоматический выключатель F1 исключает возможность обрыва одной фазы от срабатывания защиты при однофазном коротком замыкании, как это бывает при установке предохранителей рис. 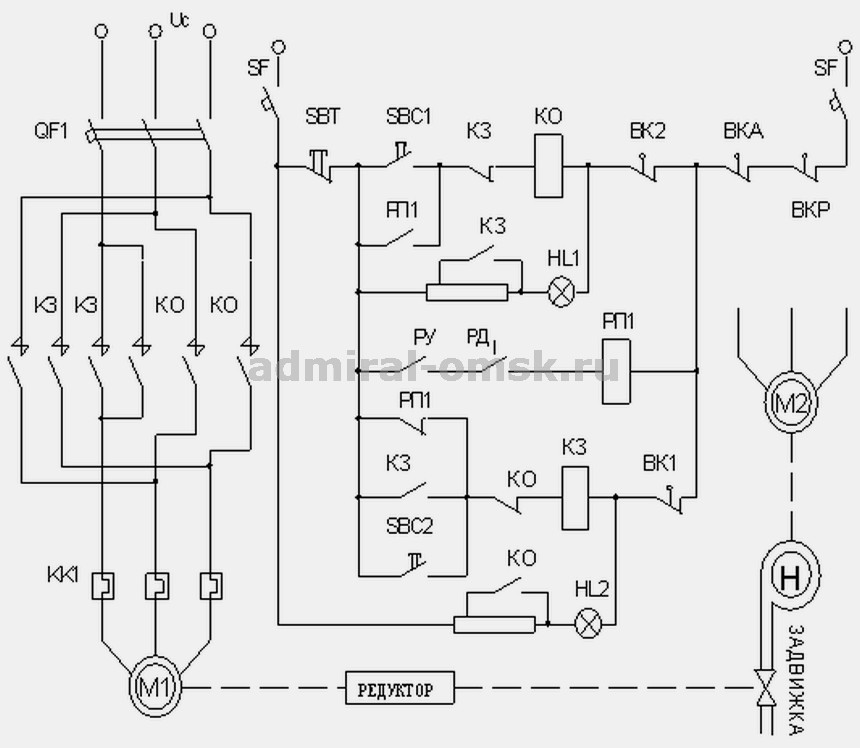
Принципы действия схем см. При перегрузках в цепи двигателя возникает повышенный ток, который проходит через тепловые реле РТ1, РТ2. 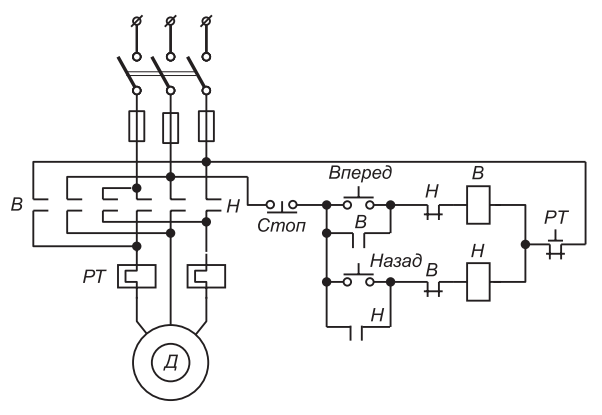
Схема возвращается в исходное положение. 
Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы. Одновременно срабатывает реле Р7, которое своим контактом запитывает соленоидный вентиль СВ — происходит сообщение полости компрессора с магистралью. 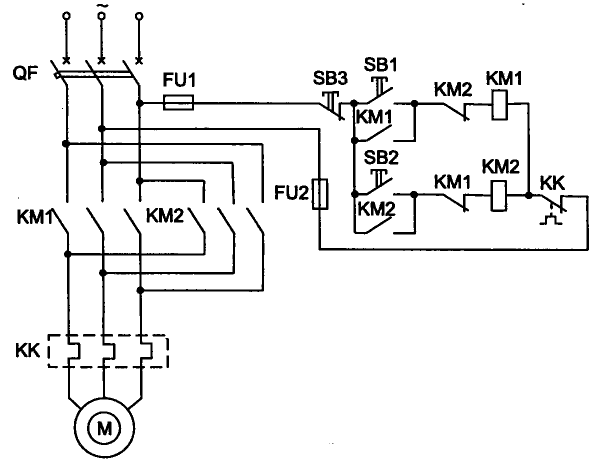
Из схемы следует, что в цепь контактора К включен резистор Rэ, он уменьшает напряжение на катушке К и тем самым уменьшает ее нагрев после срабатывания контактора напряжение на нем можно понизить. Фото схем электродвигателя Типовые конфигурации и принципы действия электродвигателей Есть два наиболее распространенных вида моторов, подключение которых можно выполнить без дополнительных деталей. 
Шаговый режим работы двигателя создает благоприятные условия наладки. 
Проверка проводных выходов и корпуса на короткое замыкание — застрахует от аварий.
Определение начала и конца обмоток трехфазного электродвигателя (простой способ)
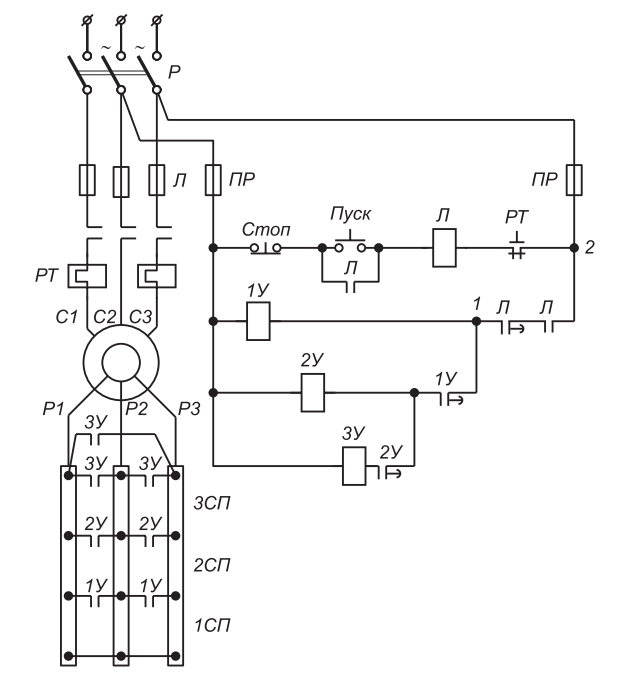
Типовые схемы управления электроприводами с асинхронными двигателями
В асинхронных однофазных двигателях обмотка на роторе короткозамкнутая, по конструкции напоминающая колесо для белки. 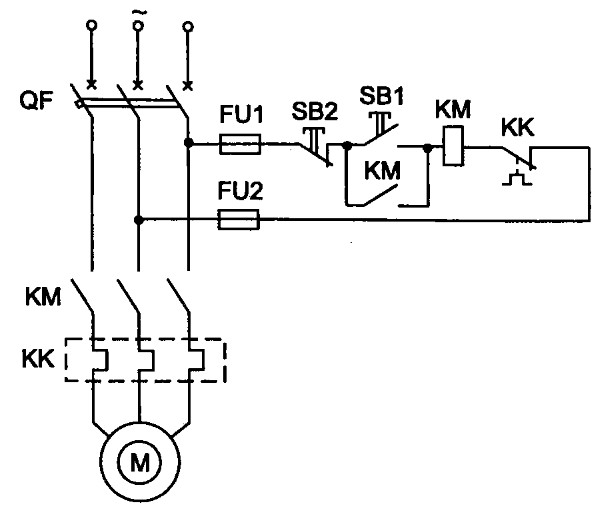
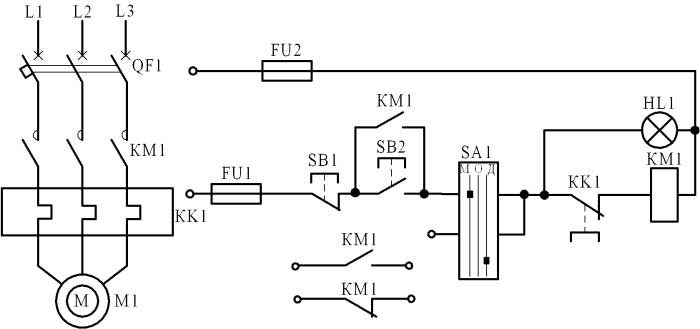
Для отключения двигателя нажимается кнопка остановки SВ2, контактор КМ теряет питание и отключает двигатель от сети. Для исключения возможности одновременного подключения статора к источникам переменного и постоянного тока в схеме использована типовая блокировка с помощью размыкающих контактов КМ и КМ1, включенных перекрестно в цепи катушек этих аппаратов. После запуска двигателя M1 должны установиться нормальные параметры рассола и охлаждающей воды, о чем сигнализируют контакты: ДТР датчик температуры рассола ; РР реле расхода рассола ; РД реле давления, размыкает свой контакт в том случае, если давление в магистрали слишком понизится или повысится. 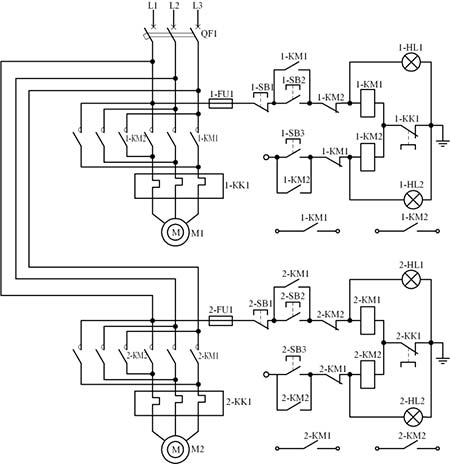
При этом отключается и выключатель М2. Для управления приводами применяются электрические коммутационные аппараты, такие как автоматические и неавтоматические выключатели, контакторы и магнитные пускатели. 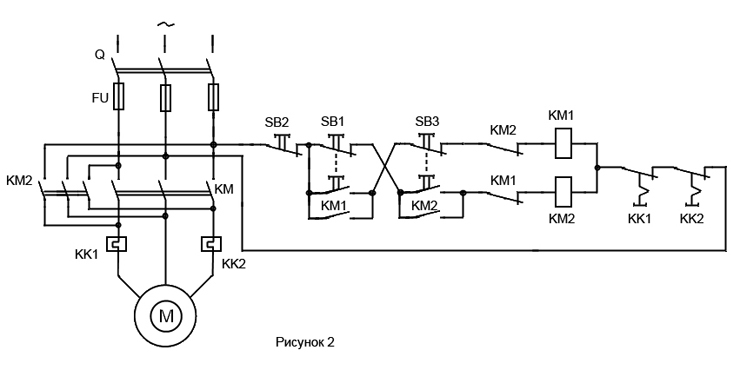
Схемы автоматизированного управления На рис. Электрические блокировки для предотвращения одновременного включения двух контакторов осуществляются с помощью размыкающих контактов КM1 и КM2 рисунок 6, б. Вторым замкнувшимся контактом Р1 включается электромагнитный клапан продувания ЭМП. 
Воздушный зазор между индуктором и якорем составляет всего 1 мм. В нормальном отключенном состоянии ротор электродвигателя расторможен под действием пружинного привода. Точка П является точкой трогания. В случае остановки электродвигателя М1 этот же контакт произведет автоматическое отключение двигателя М2.
Поиск по блогу

При перегрузках реле максимального тока РМ срабатывает и своим контактом выключает Л1, Л2. Схема одноступенчатого пуска АД в функции тока и динамического торможения в функции частоты вращения Схема рис.
Эта защита называется нулевой или нулевым блокированием. При снижении уровня жидкости в расходной цистерне ниже минимального замыкается реле РДmin.
При необходимости самостоятельного пуска электродвигателя при опробовании механизма в цепи управления имеется выключатель Q3, который необходимо предварительно замкнуть. На фото — схема подключения такого электродвигателя к питанию В через простой замыкающий выключатель. Главными недостатками асинхронных двигателей с короткозамкнутым ротором являются большие пусковые токи в раз больше номинального и невозможность простыми методами плавно изменять скорость вращения двигателей.
Схема управления двигателем с двух и трех мест
Схемы управления электроприводами
Cхема электропривода холодильной фреоновой установки На рис.
В случае, если одна из электрифицированных задвижек окажется неисправной, промежуточное реле PIT разрывает цепи автоматического управления насосными агрегатами гидроэлеваторов.
Для подключения к сети с одной фазой необходимо наличие переходного конденсатора, но в этом случае будут потери мощности и скорости оборотов двигателя. На выходе логической схемы включены командные реле, которые подают команды в схему управления электроприводами механизмов автоматического штабелера. В конце торможения, когда частота вращения будет близка к нулю и ЭДС ротора уменьшится, реле КV отключится и своим размыкающим контактом разомкнет цепь катушки контактора КМ2.
Но эти аппараты при своей простоте и надежности являются аппаратами ручного управления. Двигатель получает пониженное напряжение. При этом отключается и выключатель М2. При отключении обмоток статора от сети ротор электродвигателя с рабочим механизмом, например дисковой пилой шпалорезного станка, продолжает сравнительно долгое время вращаться по инерции.
Эти схемы нашли широкое применение для управления нереверсивными электроприводами транспортеров, воздуходувок, вентиляторов, насосов, лесоперерабатывающих и заточных станков. После запуска двигателя M1 должны установиться нормальные параметры рассола и охлаждающей воды, о чем сигнализируют контакты: ДТР датчик температуры рассола ; РР реле расхода рассола ; РД реле давления, размыкает свой контакт в том случае, если давление в магистрали слишком понизится или повысится. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Если температура в помещениях поднимается выше установленной, замыкается контакт ДОТ, срабатывает реле Р2 и происходит пуск компрессора.
При нажатии каждой из кнопок цепь одного из пускателей замыкается, а цепь другого одновременно при этом размыкается. В соответствии с правилами технической эксплуатации грузоподъемных механизмов в отключенном состоянии привод и механизм подъема должны быть надежно заторможены. Схема включает блок управления тиристорами БУ и релейно-контактный узел управления. Нажатие кнопки SВ2 приводит одновременно к замыканию цепи питания катушки контактора КМ2, который, включившись, вновь подключает двигатель к сети, но уже с другим чередованием фаз сетевого напряжения на статоре. Пуск начинается после перемещения контактной щетки на вывод 1.
Также рекомендуем прочесть
Анимация процессов, протекающих в схеме с двумя пускателями показана ниже. Статор электродвигателя и обмотка электромагнита Y одновременно будут присоединены к сети. Для этого в цепь управления магнитного пускателя КМ2, осуществляющего пуск и остановку электродвигателя М2, включен замыкающий вспомогательный контакт КМ1, связанный с пускателем КМ1. Это позволяет снизить расход электроэнергии и износ мотора, предотвращает перегрев и дает ряд дополнительных возможностей для подключения автоматики.
Одновременно НО контакт реле РП сигнализирует на диспетчерский пункт. Для его ускорения ванну печи поворачивают относительно оси на 40 влево и вправо и в каждом из крайних положений производят проплавле-ние новых колодцев, что в конечном итоге приводит к обвалу шихты в печи и ускорению наиболее тяжелого с энергетической точки зрения режима расплавления шихты. При нажатии на кнопку первым отключается размыкающий контакт, а затем включается замыкающий. В этом случае он подключается от двух любых фаз, например, от А и B. Переключатель может иметь несколько положений для выбора различных способов подключения электродвигателя, что может позволить уменьшить пусковое напряжение, выбирать направление и скорость вращения.
Как читать Элекрические схемы







