Аппаратура радиоуправления
Предлагаемый радиоприёмник предназначен для слежения за обстановкой в эфире в диапазоне 26,957 — 27,283 МГц, отведённом для радиоуправления моделями. Наличие радиопомех, создаваемых как аппаратурой радиоуправления другими моделями, так и радиопередатчиками различного назначения, работающими .
Как переделать модули радиопередатчика типа FS1000A и приемника типа XV-MR-5V для организации аналогового канала связи. Как-то возникла необходимость в передаче аналогового сигнала. Модуль передатчика FS1000A представляет собой простой однокаскадный микромощный передатчик на транзисторе Q1 .
Схема передатчика и приемника на диапазон 27МГц для работы с двухтональной кодировкой команд (DTMF), применяющаяся в телефонии, очень удобна так же и для устройства радиоуправления. Сигнал можно передать по любому аналоговому каналу связи, высокая помехозащищенность и относительная доступность .
Эта схема предназначена для управления электродвигателем модели трамвая. Модель трамвая движется по отрезку железной дороги то в одну, то в другую сторону. Еще есть стрелка и тупик в депо. Модель должна двигаться по основному отрезку пути сначала в одну сторону, затем в конце пути ударяется .
Схема подключения модулей TX118SA-4 и RX480E-4 для организации четырехканальной системы радиоуправления. Наверное, многие хотели бы дистанционно управлять различными бытовыми приборами, и самодельными устройствами. Но их останавливает сложность изготовления передатчика и приемника, необходимость .
Принципиальная схема простой КВ аппаратуры радиоуправления на 27МГц, построенной на транзисторах 9018 и микросхеме LM386. Этот радиотракт работает на частоте 27,12 МГц, его можно использовать дляпропорционального радиоуправления моделями, либо в любом случае, когда нужно передать НЧ-сигнал на .
Принципиальная схема дистанционного радиоуправления на основе китайского квартирного радиозвонка. В магазинах электротоваров можно приобрести квартирный звонок с радиоуправлением. Устройство производится в Китае, и состоит из двух модулей, питающихся от автономных источников. Один из модулей .
Принципиальная схема системы радиоуправления, построенной на основе телефона-трубки, рабочая частота — 433МГц. В конце 90-х были очень популярны телефоны-трубки, да и сейчас они повсюду продаются. Но, сотовая связь болееудобна и сейчас повсеместно вытесняет стационарную. Купленные когда-то .
Существуют игрушки — модели вездеходов, танков, луноходов, у которых есть две гусеницы или два ряда колес, работающих от отдельных электродвигателей. При этом поворот выполняется отключением одного из двигателей (с той стороны, в которую нужно повернуть). Поворот происходит резко или нужно его регулировать скачками включая — выключая сторону движителя.
Это устройство в основном предназначено для управления гаражными дверями, центральным замком в автомобиле, освещением, включением сигнализации на расстоянии и т. д. Использованные в его конструкции специализированные схемы фирмы UMC UM3758-130A позволяют установить З12 комбинаций кодов. Весь.
Схема и ремонт радиоуправляемой игрушечной машинки Diskie Toys модели Mc QUEEN
Игрушечные машинки Diskie Toys серии Cars 2 копируют персонажей мультфильма Cars 2 (Тачки 2) и популярны у детей. Автор ремонтировал машинку модели «Молния Мак Куин» (Mc Queen) китайского производства, неизвестного года выпуска. На 3-й день машинка упала в воду, из неё пошёл дым, потом она стала останавливаться, не реагируя на команды с пульта. На интернет-сайте поддержки [1] предложений по ремонту нет. В московских интернет магазинах гарантийный срок обмена неисправных радиоуправляемых игрушек, на момент написания статьи был 7 дней. Согласно инструкции по эксплуатации на RC (Radio-Car) Mc QUEEN установлен сертифицированный модуль радиоуправления «27138» на частоту 27 МГц. Сведений по ремонту этого модуля автор не нашел. В настоящей статье приведены электрические схемы пульта управления (рис.1), машинки модели Mc QUEEN (рис.2), описаны найденные неисправности и способы их устранения (рис.3), отмечены некоторые особенности управления машинкой.
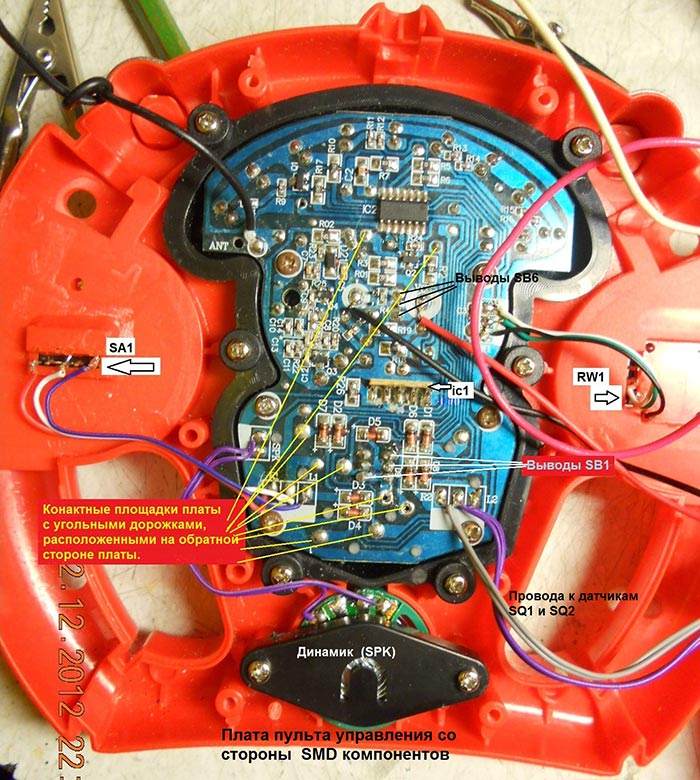
На схемах буквенно-цифровые обозначения радиодеталей соответствуют обозначениям, указанным на монтажных платах. Не обозначенные на платах детали автор обозначил самостоятельно. Обозначенные на платах, но не распаянные детали, рассеиваемая мощность SMD резисторов, перемычки, в т.ч. SMD, на схемах не указаны. Маркировка полупроводниковых SMD приборов указана в рамке, если была нанесена разборчиво. Все приведенные на схемах номиналы были прочитаны или измерены. В пульте управления, контакты кнопок SB2, SB3, SB4, SB5—угольные, они соединены с соответствующими контактными площадками платы угольными дорожками, такие же угольные дорожки соединяют с платой средний вывод SA1 и вывод 10 ic2. Эти дорожки на плате не обозначены. Они отмечены на схеме пульта управления утолщенными линиями и символом резистора, с указанием сопротивления данной угольной дорожки, или замкнутого контакта SB2—SB5 между двумя соответствующими контактными площадками. Шифратор команд управления пульта, микросхема ic2 с маркировкой «515Т», и дешифратор команд управления машинки, микросхема U2 с маркировкой «515R», в корпусах SOP 14, китайского производства. Программируются ли они, неизвестно, но объём памяти на одну-две команды имеют, описание этих микросхем автор не нашёл.

Пульт управления потребляет ток 50—150 мА. Его работоспособность сохраняется при питании от 3-х батареек LR6 до напряжения 3,3В. Светодиоды D19-D20—индикаторы включения пульта. С вывода 8 ice2 включается радиопередатчик пульта управления, и передаются коды, модулирующие излучаемый сигнал [2]. C вывода 9 ic2 сигналы управления поступают на вывод 3 ic1 звукового процессора, «черную таблетку», находящегося на отдельной плате, 8 на 15 мм.

В памяти ic1 2-х секундными файлами записаны звуковые эффекты. При поступлении сигнала управления ic1 выбирает нужный файл и транслирует его непрерывно до окончания управляющего сигнала. Динамик SPK находится внутри пульта управления. Первые два дня пульт мог произносить фразу: «Поговори со мной».
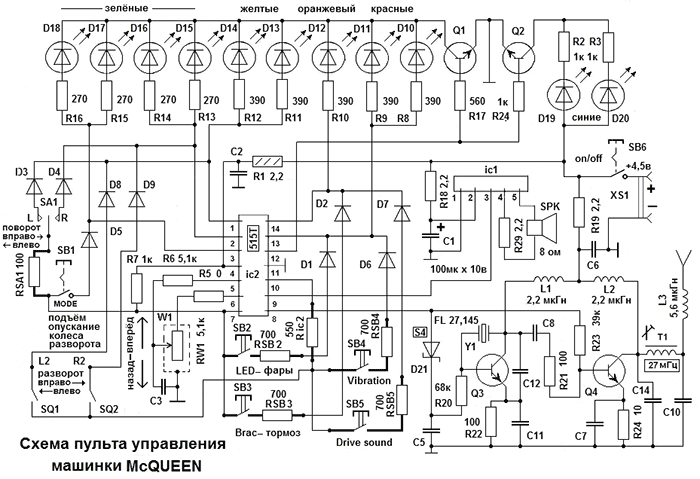
Схема 1
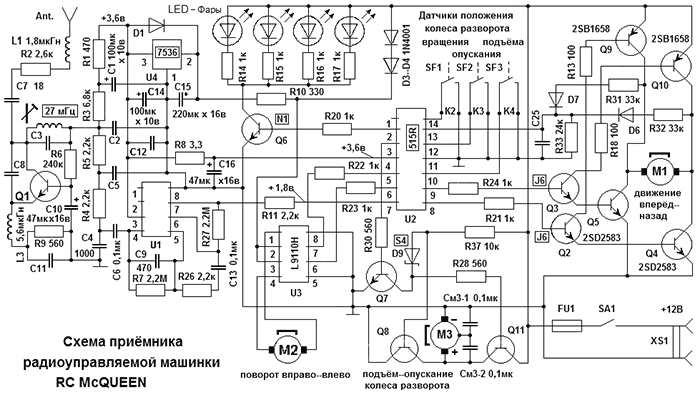
Схема 2
Движение вперёд—назад выполняется электродвигателем машинки М1, его работа управляется с пульта переменным сопротивлением RW1, включенным как реостат. Светодиоды шкалы пропорционального управления включаются последовательно, начиная с D18-D17 по D11-D10, они индицируют отклонение движка RW1 от среднего положения при движении вперёд—назад. Регулировка скорости движения осуществляется изменением частоты подачи команд вперёд—назад с пульта управления. Но эта регулировка не очень эффективна, т.к. на малых оборотах электродвигателю не хватает крутящего момента и машинка начинает дёргаться на старте. Поворот вправо—влево выполняется электродвигателем машинки М2, и управляется с пульта переключателем SA1. Для выполнения команды «Разворот» (Круговое вращение), нажатием переключателя SB1 «MODE» с пульта включается электродвигатель машинки М3 и подпружиненная платформа с закрепленным на ней колесом разворота опускается из верхнего положения. В нижнем положении платформы колесо разворота выдвигается и упирается в поверхность пола, шестерня на его оси входит в зацепление с шестерней редуктора двигателя ведущих колес М1, одновременно задние, ведущие колеса отрываются от поверхности, размыкается контакт SF3 и замыкается SF2, после чего двигатель М3 останавливается. Теперь команды поступающие с RW1 и SA1 блокируются, а двигатель М1 будет управляться датчиками положения SQ1 и SQ2 и вращать колесо разворота. Контакты SQ1 и SQ2 должны срабатывать при покачивании пультом из стороны в сторону, при замыкании одного из них машинка разворачивается вправо или влево в течение 3-х сек, затем самостоятельно останавливается. Датчики SQ1 и SQ2 металлические, цилиндрической формы, с осевым расположением выводов, без маркировки. Внутри, судя по звуку, находится шарик. При повороте датчика выводом золотистого цвета вниз контакт внутри датчика замыкается, а при повороте его вниз выводом серебристого цвета — размыкается. Датчики расположены на задней стенке пульта управления под углом в 90 град. один к другому, но угол их срабатывания более 150 град. Возможно, по этому, один из них был установлен в пульте вверх ногами, и чтобы изменить направление вращения машинки приходилось поворачивать пульт то вверх антенной, то вниз. Для отмены команды на круговое вращение выключают SB1, после чего повторно включается двигатель М3: платформа колеса разворота поднимается, шестерня на его оси отсоединяется от редуктора М1, размыкается SF2, ведущие колеса опускаются на поверхность, в верхнем положении платформы замыкается SF3 и М3 останавливается.
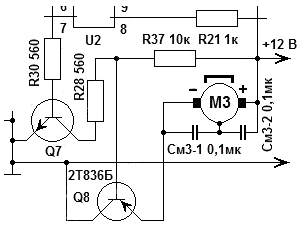
Схема 3
Машинка во время езды потребляет ток более 1А. При питании от 8-ми батареек LR6 она сохраняет работоспособность до напряжения 10,5В (1,3В на элемент). Полуразряженные элементы данного типоразмера не «держат» большой для них ток, поэтому применение аккумуляторов нежелательно. Самовосстанавливающийся предохранитель FU1 маркировки не имеет, и ни разу не сработал. Микросхема U1 без маркировки, вероятно, это сдвоенный операционный усилитель, аналогичный входящему в состав китайской микросхемы PTBA978B [3], «обвеска» их выводов совпадает, номиналы С4, С6, С9, С13 взяты из [3]. Вне платы приемника машинки расположены электродвигатели М1, М2, М3, датчики SF1—SF3, разъём и выключатель питания, светодиоды фар, плата с сопротивлениями R14—R17. Двигатели М1 и М3 с редукторами, платформа с колесом разворота, ведущие колеса собраны в единый блок заднего моста. Датчик SF1 находится в неразборном узле крепления оси колеса разворота, доступа к нему нет, его контакты замыкаются и размыкаются при каждом обороте колеса разворота. Датчики SF2 и SF3 —микротумблеры нажимного действия, SF2 крепится в самом низу блока, он наиболее подвержен загрязнению. Датчик SF3 находится в верхней части сборки. Все три датчика соединены проводами с соответствующими контактными площадками на плате: К2, К3, К4, при срабатывании они замыкают на общий провод соответствующие выводы микросхемы U2. При нарушении контактов датчиков SF2 и SF3, или обрыве их соединительных проводов, после подачи или отмены команды «MODE» двигатель М3 продолжает работать, непрерывно опуская и поднимая колесо разворота. Дешифратор U2, заметив ошибку в выполнении команды, самоблокируется и прекращает выполнение всех команд. Для перезапуска U2 машинку нужно выключить и повторно включить переключателем SA1.

Сломанная машинка отключалась после нажатия на пульте кнопки SB1 из-за невозможности выполнить команду «MODE». На её плате до обугливания выгорели транзисторы Q8 и Q11, управляющие двигателем М3, так, что невозможно было установить их тип и проводимость. Комплиментарная пара транзисторов подключенная эмиттерами к «+» М3, включала бы его при закрытом транзисторе Q7. Но М3 должен включаться по команде «MODE» при открывании Q7, тогда p-n-p транзистор Q11 и n-p-n Q8 надо подключать коллекторами к выводу «+» М3. После установки на место Q8 и Q11 пары транзисторов «8050» и «8550» коллекторами к «+» М3, тот заработал, но в течение суток эти транзисторы сгорели повторно. Пришлось рисовать схемы и разбираться в причине происшедшего: оказалось, что при переключении Q7, через транзисторы Q8 и Q11 некоторое время течет сквозной ток, а такое, как на плате, подключение их базовых выводов к D9 этот ток только увеличивает. При выполнении команды «MODE» М3 включается всего на 2—3 секунды, поэтому проработать несколько дней эта схема могла. Но при частом включении команды «MODE», или повышении сопротивления контактов SF2-SF3, транзисторы Q8 и Q11 сгорали бы обязательно. Чтобы избежать сквозного тока, из цепи управления М3 был удален n-p-n транзистор Q8, убрать бы его сразу и ничего бы не сгорело. На место Q11 был припаян 2Т836Б, всё заработало, но из-за отслаивания фольги контактных площадок Q11, (ранее он выгорал сильнее Q8), пришлось изменить схему включения М3. Результат ремонта показан на рис. 3. С платы удалены: диод D9, отслоившаяся фольга контактных площадок Q11. На место D9 установлен R28, транзистор 2Т836Б припаян в отверстия Q8, место Q11 оставлено свободным. Вывод «+» М3 подключен к плюсу питания платы, а «—» М3 к эмиттеру 2Т836Б.

Возможно, что плата приёмника предназначалась для другого изделия, а впоследствии была приспособлена к данной модели машинки. Возможно, что дефектная плата досталась только части машинок данной серии.
Из-за увеличения сопротивления контактов микротумблеров SF2 и SF3 они были промыты, для чего пришлось разбирать задний мост машинки. В пульте управления датчики SQ1 и SQ2 были заменены на кнопочные выключатели, установленные на заднюю стенку пульта. Управление машинкой стало удобнее. Пластиковая трубка, предназначенная для поддерживания антенного провода машинки в вертикальном положении, сломалась, пришлось установить на машинку съёмную антенну.
После ремонта и переделки машинка без поломок работает уже много месяцев.
Вторая жизнь радиоуправлемой машинки
 В давние-стародавние времена, 13 лет назад, была куплена радиоуправляемая машинка для себя любимого. В нее успели наиграться сыновья, а машинка была еще жива, но родной NiMH аккумулятор не выдержал пытки и почил с миром. Попытка его живить ни к ему не привела, осталось в нём емкости от 420 ма·ч где-то 50-70 ма·ч. Была предпринята попытка заменить его на Li-ion от ноутбуков, но электроника отказывалась нормально работать от 3,7 в и глючила страшно. Попытка поставить DC/DC до 5в. привела к судорожному дерганью ходового мотора, а напихать большой дроссель и конденсаторы по выходу DC/DC не было физически места.
В давние-стародавние времена, 13 лет назад, была куплена радиоуправляемая машинка для себя любимого. В нее успели наиграться сыновья, а машинка была еще жива, но родной NiMH аккумулятор не выдержал пытки и почил с миром. Попытка его живить ни к ему не привела, осталось в нём емкости от 420 ма·ч где-то 50-70 ма·ч. Была предпринята попытка заменить его на Li-ion от ноутбуков, но электроника отказывалась нормально работать от 3,7 в и глючила страшно. Попытка поставить DC/DC до 5в. привела к судорожному дерганью ходового мотора, а напихать большой дроссель и конденсаторы по выходу DC/DC не было физически места.
И было принято кардинальное решение: выкинуть всю электронику в машинке и пульте и заменить новой.
Пульт оказался полностью дискретным в части управления, мозгом там была PT8A977BP вот с такой схемой включения:

Мозгом машинки (приемника) был собрат по несчастью PT8A978BP со следующей схемой включения:

Покопавшись в загашниках, было решено использовать в качестве мозга atmega8L , а для радиочасти NRF24L01+ , которых было множество в наличии для использования в умном доме. В пульте (передатчике) оставлялись к использованию кнопки (ползунки) которые управляют направлением движения машинки и траекторией.
Сервомашинки в приемнике были собраны по неведомой конструкции и представляли собой по сути редуктор с DC-мотором. Характеристики, которые удалось с них снять:
- Максимальный ток сервы на поворотные колеса 0.27 А при 3.5 в. Сопротивление сервы 17 Ом в неподвижном среднем положении, от 1 кОм до 150 Ом при выкрученных в сторону колесах.
- Ток ведущих колес на холостых оборотах 0.43 А при 3.5 в, под нагрузкой до 2.3 А и потом защита у акб срабатывает. Сопротивление на проводах ведущих колес 1.3 Ом, если их не трогать.
По размерам посадочного места в машинке (приемнике) не густо, максимальная высота платы с деталями 16 мм, но не по всей площади платы, т.к. есть дырки под крепление и ограничители по краям.
Что должно быть по функционалу:
- Движение вперед и назад с регулировкой скорости (ШИМ) или на первое время просто вкл/выкл
- Поворот в лево и вправо.
- Вкл/выкл фары спереди и габариты сзади
- Вкл/выкл проблесковых маячков из двух светодиодов на крыше машины (полицейская мигалка).
- Вкл/выкл гудка (пищалки) со звуком клаксона автомобиля.
Начнем с передатчика, т.к. с ним получилось проще всего, кроме не поместившейся в корпус платы.

Кнопки подключены по такой схеме только ради экономии места и возможности выхода микроконтроллера из powerdown при нажатии на любую кнопку. Совершенно не рекомендую такое решение, если питание не батарейное, или есть управление силовой нагрузкой, т.к. МК может ловить помехи от наводок по портам кнопок, и их нужно будет шунтировать резисторами и стабилитронами. По питанию в результате была оставлена батарейка типа «Крона» и поставлен LDO AMS1117-3.3 (на схеме не показан) с выключателем.
Алгоритм работы передатчика:
- Инициализировали перефирию
- Если нажата или отпущена одна из кнопок, то выходим из сна и отправляем в NRF состояние порта кнопок
- Если в течении 5 секунд кнопки не нажимают или отпускают, то уходим в Powerdown
- Раз в 5 секунд проверяем напряжение питания МК, если оно ниже 2.5в, то двукратно пищим
- Идем в пункт 2.
В результате пультик выглядит в разобранном виде так:

Слева плата управления, в центре старая плата, которую выпаивать не стал, ибо не мешала.
В будущем есть планы вырезать Крону и поставить 18650, но лень.
В целом с пультом проблем было очень мало, главный косяк, что плата получилась чуть толще, чем могла поместиться в пульт, хотя все размеры снимал по несколько раз. В результате в собранном виде у пульта есть слева щель и через нее видно плату и индикацию светодиодов на ней:

Кнопки на пульте имеют следующее назначение:

Остальные органы управления (вперед/назад, влево/вправо) остались без изменений.

Красным выделены элементы, которые пришлось добавлять уже после изготовления печатной платы на этапе наладки. Т.к. ходовой двигатель потреблял ток до 5 А легко, то от этого МК становилось плохо, и он перезагружался. Решается эта проблема добавленными элементами: VD1, L2, C10, L3, C9. Перечисленные элементы установлены навесным монтажом.
VD2, V3, R21, R22 реализуют ШИМ-управление ходовым двигателем. Дело в том, что если этого не сделать, машина превращается в адский скоростной болид, соответственно редуктор или корпус машины просто развалятся после столкновения с препятствиями или от времени. Без ШИМ реализован Турбо режим, если одновременно нажать Фара+Мигалка+Гудок, таким же нажатием он и отключается.
В разобранном виде обновленная машинка выглядит так:

Места у неё в нутре совсем не много:

Плата управления двухэтажная (из двух плат), на второй реализован H-мост по управлению ходовым двигателем:


 Следует отдельно описать работы с NRF, т.к. было много времени потрачено на превращение готовой библиотеки, найденой интернетах, в рабочий вариант.
Следует отдельно описать работы с NRF, т.к. было много времени потрачено на превращение готовой библиотеки, найденой интернетах, в рабочий вариант.
Главной проблемой были дубликаты получаемых комманд, виной тому была неправильная обработка принятой команды на приемнике, не правильно было так:
- Ждем от NRF поднятия флага RX_DR, входим в обработчик приема;
- Выгребаем из буфера приема команду, отправляем ее на обработку;
- Сбрасываем флаг RX_DR.
Это в корне не верно, т.к. флаг RX_DR говорит только о факте принятия данных буфер, но команд может прийти несколько (всего буфер NRF рассчитан на 3 команды).
Правильный алгоритм такой:
- Ждем от NRF поднятия флага RX_DR, входим в обработчик приема;
- Выгребаем из буфера приема команду, отправляем ее на обработку;
- Проверяем есть ли еще принятые команды по флагу RX_P_NO, если есть, то переходим к п2;
- Сбрасываем флаг RX_DR.
Инициализация NRF используется следующая (от NRF нужна дальность, но не скорость):







