Возбуждение двигателя постоянного тока. Схемы возбуждения.
Возбуждение двигателя постоянного тока является отличительной особенностью таких двигателей. От типа возбуждения зависят механические характеристики электрических машин постоянного тока. Возбуждение может быть параллельным последовательным смешанным и независимым. Тип возбуждения означает, в какой последовательности включены обмотки якоря и ротора.
При параллельном возбуждении обмотки якоря и ротора включаются параллельно друг другу к одному источнику тока. Так как у обмотки возбуждения больше витков чем у якорной то и ток в ней течет незначительный. В цепи, как обмотки ротора, так и обмотки якоря могут включаться регулировочные сопротивления.
Обмотка возбуждения может подключаться и к отдельному источнику тока. В этом случае возбуждение будет называться независимым. У такого двигателя характеристики будут схожи с двигателем, в котором применяется постоянный магнит. Скорость вращения двигателя с независимым возбуждением, как и у двигателя с параллельным возбуждением зависит от тока якоря и основного магнитного потока. Основной магнитный поток создается обмоткой ротора.
Скорость вращения можно регулировать с помощью реостата включенного в цепь якоря изменяя тем самым ток в нем. Также можно регулировать ток возбуждения, но здесь нужно быть осторожным. Так как при его чрезмерном уменьшении или полном отсутствии в результате обрыва питающего провода ток в якоре может возрасти до опасных значений.
Также при малой нагрузке на валу или в режиме холостого хода скорость вращения может настолько увеличится, что может привести к механическому разрушению двигателя.
Если обмотка возбуждения включена последовательно с якорной, то такое возбуждение называется последовательным. При этом через якорь и обмотку возбуждения протекает один и тот же ток. Таким образом, магнитный поток изменяется с изменением нагрузки двигателя. А следовательно скорость двигателя будет зависеть от нагрузки.
Двигатели с таким возбуждением нельзя запускать на холостом ходу либо с небольшой нагрузкой на вал. Их применяют в том случае если, требуется большой пусковой момент или способность выдерживать кратковременные перегрузки.
При смешанном возбуждении используются двигатели, у которых на каждом полюсе есть по две обмотки. Их можно включить так чтобы магнитные потоки как складывались, так и вычитались.
В зависимости от того как соотносятся магнитные потоки двигатель с таким возбуждением может работать как двигатель с последовательным так и двигатель с параллельным возбуждением. Все зависит от ситуации, если нужен большой стартовый момент, такая машина работает в режиме согласного включения обмоток. Если же необходима постоянная скорость вращения, при динамически изменяющейся нагрузке применяют встречное включение обмоток.
В машинах постоянного тока можно изменять направление движения ротора. Для этого необходимо изменить направление тока в одной из обмоток. Якорной либо возбуждения. Изменением полярности направление вращения двигателя можно добиться только в двигателе с независимым возбуждением, или в котором используется постоянный магнит. В других схемах включения нужно переключать одну из обмоток.
Стартовый ток в машине постоянного тока достаточно велик, поэтому ее следует запускать с добавочным реостатом, чтобы избежать повреждения обмоток.
Способы возбуждения машин постоянного тока и их классификация
 Ток, протекающий в обмотке возбуждения основных полюсов, создает магнитный поток . Электрические машины постоянного тока следует различать по способу возбуждения и схеме включения обмотки возбуждения.
Ток, протекающий в обмотке возбуждения основных полюсов, создает магнитный поток . Электрические машины постоянного тока следует различать по способу возбуждения и схеме включения обмотки возбуждения.
Генераторы постоянного тока могут выполняться с независимым, параллельным, последовательным и смешанным возбуждением. Следует заметить, что теперь применение в качестве источников энергии генераторов постоянного тока очень ограничено.
Обмотка возбуждения генератора постоянного тока с независимым возбуждением получает питание от независимого источника — сети постоянного тока, специального возбудителя , преобразователя и др. (рис. 1, а). Эти генераторы применяются в мощных системах, когда напряжение возбуждения должно быть выбрано отличным от напряжения генератора, в системах регулирования скорости вращения двигателей, которые питаются от генераторов и других источников.
Значение тока возбуждения мощных генераторов составляет 1,0—1,5% от тока генераторов и до десятков процентов для машин мощностью порядка десятков ватт.
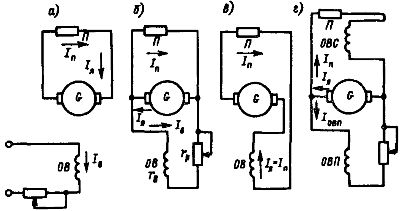
Рис. 1. Схемы генераторов постоянного тока: а — с независимым возбуждением; б — с параллельным возбуждением; в — с последовательным возбуждением; г — со смешанным возбуждением П — потребители
У г енератора с параллельным возбуждением обмотка возбуждения включается на напряжение самого генератора (смотрите рис. 1,б). Ток якоря I я равен сумме токов нагрузки I п и тока возбуждения I в: I я = I п + I в
Генераторы выполняются обычно для средних мощностей.
Обмотка возбуждения генератора с последовательным возбуждением включена последовательно в цепь якоря и обтекается током якоря (рис. 1, в). Процесс самовозбуждения генератора протекает очень бурно. Такие генераторы практически не используются. В самом начале развития энергетики применялась система передачи энергии с последовательно включенными генераторами и двигателями последовательного возбуждения.
Генератор со смешанным возбуждением имеет две обмотки возбуждения — параллельную ОВП и последовательную ОВС обычно с согласным включением (рис. 1, г). Параллельная обмотка может быть включена до последовательной («короткий шунт») или после нее («длинный шунт»). МДС последовательной обмотки обычно невелика и рассчитана только на компенсацию падения напряжения в якоре при нагрузке. Такие генераторы теперь также практически не применяются.
Схемы возбуждения двигателей постоянного тока подобны схемам для генераторов. Двигатели постоянного тока большой мощности выполняются обычно с независимым возбуждением . У двигателей параллельного возбуждения обмотка возбуждения получает питание от того же источника энергии, что и двигатель. Обмотка возбуждения включается непосредственно на напряжение источника энергии, чтобы не сказывалось влияние падения напряжения в пусковом сопротивлении (рис. 2).
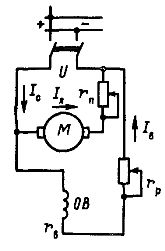
Рис. 2. Схема двигателя постоянного тока с параллельным возбуждением
Ток сети Ic составляется из тока якоря I я и тока возбуждения I в.
Схема двигателя последовательного возбуждения подобна схеме на рис. 1, в. Благодаря последовательной обмотке вращающий момент при нагрузке возрастает больше, чем у двигателей параллельного возбуждения, при этом скорость вращения уменьшается. Это свойство двигателей определяет их широкое применение в приводах электровозной тяги: в магистральных электровозах, городском транспорте и др. Падение напряжения в обмотке возбуждения при номинальном токе составляет единицы процентов от номинального напряжения.
Двигатели смешанного возбуждения из-за наличия последовательной обмотки в некоторой мере имеют свойства двигателей последовательного возбуждения. В настоящее время они практически не применяются. Двигатели параллельного возбуждения иногда выполняются со стабилизирующей (последовательной) обмоткой, включаемой согласно с параллельной обмоткой возбуждения, для обеспечения более спокойной работы при пиках нагрузки. МДС такой стабилизирующей обмотки невелика — единицы процентов от основной МДС.
Двигатели параллельного возбуждения
 Схема двигателя.
Схема двигателя.
Схема двигателя параллельного возбуждения изображена на рис. 1.25. Обмотка якоря и обмотка возбуждения включены параллельно. В этой схеме: I – ток, потребляемый двигателем из сети, Iя – ток якоря, Iв – ток возбуждения. Из первого закона Кирхгофа следует, что I = Iя + Iв.
Естественная механическая характеристика. Естественная механическая характеристика описывается формулой (1.6).
При холостом ходе М = 0 и nх = U/СЕФ.
Если Ф = const, то уравнение механической характеристики принимает вид:
Из (1.8) следует, что механическая характеристика (рис. 1.26, прямая 1) – прямая с углом наклона a и угловым коэффициентом b. Так как у двигателей постоянного тока Rя мало, то с увеличением нагрузки на валу частота вращения n изменяется незначительно – характеристики подобного типа называются «жесткими».
Ток, потребляемый двигателем из сети, практически растет пропорционально моменту нагрузки. Действительно, М » Мэм = См Iя Ф, и так как у двигателя параллельного возбуждения Ф = const, то Iя
Регулирование частоты вращения.
Регулирование частоты вращения возможно из (1.6) тремя способами: изменением магнитного потока главных полюсов Ф, изменением сопротивления цепи якоря Rя и изменением подводимого к цепи якоря напряжения U (изменение n за счет изменения момента нагрузки М в понятие регулирования не входит).
 Регулирование n изменением магнитного потока Ф осуществляется с помощью регулировочного реостата Rр. При увеличении сопротивления реостата ток возбуждения Iв и магнитный поток главных полюсов Ф уменьшаются. Это приводит, во-первых, к увеличению частоты вращения холостого хода nх и, во-вторых, к увеличению коэффициента b, т.е. к увеличению угла наклона механической характеристики. Однако b остается небольшим и жесткость механических характеристик сохраняется. На рис. 1.28 помимо естественной характеристики 1, соответствующей максимальному магнитному потоку Ф, приведено семейство механических характеристик 2-4, снятых при уменьшенном магнитном потоке. Из характеристик следует, что изменением магнитного потока можно только увеличивать частоту вращения относительно естественной характеристики. Практически частоту вращения таким методом можно увеличивать не более чем в 2 раза, так как увеличение скорости приводит к ухудшению коммутации и даже механическим повреждениям машины.
Регулирование n изменением магнитного потока Ф осуществляется с помощью регулировочного реостата Rр. При увеличении сопротивления реостата ток возбуждения Iв и магнитный поток главных полюсов Ф уменьшаются. Это приводит, во-первых, к увеличению частоты вращения холостого хода nх и, во-вторых, к увеличению коэффициента b, т.е. к увеличению угла наклона механической характеристики. Однако b остается небольшим и жесткость механических характеристик сохраняется. На рис. 1.28 помимо естественной характеристики 1, соответствующей максимальному магнитному потоку Ф, приведено семейство механических характеристик 2-4, снятых при уменьшенном магнитном потоке. Из характеристик следует, что изменением магнитного потока можно только увеличивать частоту вращения относительно естественной характеристики. Практически частоту вращения таким методом можно увеличивать не более чем в 2 раза, так как увеличение скорости приводит к ухудшению коммутации и даже механическим повреждениям машины.
Другой способ регулирования скорости связан с включением последовательно с якорем регулировочного реостата Rя.р (пусковой реостат Rп для этой цели непригоден, так как он рассчитан на кратковременный режим работы). Формула (1.6) при этом принимает вид:
n =  ,
,
откуда следует, что скорость при холостом ходе при любом сопротивлении Rя.р одинакова, а коэффициент b и, следовательно, наклон механических характеристик 5-7 увеличивается (рис. 1.26). Регулирование частоты вращения этим способом приводит к уменьшению частоты вращения относительно естественной характеристики. Кроме того, оно неэкономично, так как связано с большой мощностью потерь (Rя.р I ) в регулировочном реостате, по которому протекает весь ток якоря.
) в регулировочном реостате, по которому протекает весь ток якоря.
 Третий способ регулирования частоты вращения – безреостатное изменение подводимого к якорю напряжения. Он возможен только в случае, когда якорь двигателя питается от отдельного источника, напряжение которого можно регулировать. В качестве регулируемого источника применяются отдельные, специально предназначенные для данного двигателя генераторы или управляемые вентили (тиратроны, ртутные выпрямители, тиристоры). В первом случае образуется система машин, называемая системой Г-Д (генератор – двигатель), (рис. 1.27). Она применяется для плавного регулирования в широких пределах частоты вращения мощных двигателей постоянного тока и в системах автоматического управления. Система регулирования с управляемыми вентилями УВ (рис. 1.28) находит применение для регулирования частоты вращения двигателей меньшей мощности. Ее преимущество – большая экономичность.
Третий способ регулирования частоты вращения – безреостатное изменение подводимого к якорю напряжения. Он возможен только в случае, когда якорь двигателя питается от отдельного источника, напряжение которого можно регулировать. В качестве регулируемого источника применяются отдельные, специально предназначенные для данного двигателя генераторы или управляемые вентили (тиратроны, ртутные выпрямители, тиристоры). В первом случае образуется система машин, называемая системой Г-Д (генератор – двигатель), (рис. 1.27). Она применяется для плавного регулирования в широких пределах частоты вращения мощных двигателей постоянного тока и в системах автоматического управления. Система регулирования с управляемыми вентилями УВ (рис. 1.28) находит применение для регулирования частоты вращения двигателей меньшей мощности. Ее преимущество – большая экономичность.
Регулирование частоты вращения изменением U практически возможно только в сторону уменьшения, так как увеличение напряжения выше номинального недопустимо из-за резкого ухудшения коммутации. Из (1.9) следует, что при уменьшении напряжения уменьшается скорость холостого хода nх, а наклон механических характеристик 8-10 не изменяется (см. рис. 1.26), они остаются жесткими даже при низких напряжениях. Диапазон регулирования (nmax/nmin) таким способом 6:1-8:1. Он может быть значительно расширен при применении специальных схем с обратными связями.
Регулировочная характеристика.
Регулировочная характеристика n=f(Iв) двигателя параллельного возбуждения изображена на рис. 1.29.
Ее характер определяется зависимостью (1.5), из которой следует, что частота вращения обратно пропорциональна магнитному потоку и, следовательно, току возбуждения Iв. При токе возбуждения Iв = 0, что может быть при обрыве цепи возбуждения, магнитный поток равен остаточному Фост и частота вращения становится настолько большой, что двигатель может механически разрушиться, – подобное явление называется разносом двигателя.
Физически явление разноса объясняется тем, что вращающий момент (1.2) при уменьшении магнитного потока, казалось бы, должен уменьшиться, однако ток якоря Iя = (U – E)/Rя увеличивается значительнее, так как уменьшается Е (1.1) и разность U – E увеличивается в большей степени (обычно Е » 0,9 U).
 Тормозные режимы.
Тормозные режимы.
Тормозные режимы двигателя имеют место тогда, когда электромагнитный момент, развиваемый двигателем, действует против направления вращения якоря. Они могут возникать в процессе работы двигателя при изменении условий работы или создаваться искусственно с целью быстрого уменьшения скорости, остановки или реверсирования двигателя.
У двигателя параллельного возбуждения возможны три тормозных режима: генераторное торможение с возвратом энергии в сеть, торможение противовключением и динамическое торможение.
Генераторное торможение возникает в тех случаях, когда частота вращения якоря n становится больше частоты вращения при идеальном (т.е. при Мпр = 0) холостом ходе nx (n>nx). Переход в этот режим из режима двигателя возможен, например, при спуске груза, когда момент, создаваемый грузом, приложен к якорю в том же направлении, что и электромагнитный момент двигателя, т.е. тогда, когда момент нагрузки действует согласно с электромагнитным моментом двигателя и он набирает скорость, большую чем nx. Если n>nx, то Е>Uc (где Uc – напряжение сети) и ток двигателя изменяет свой знак (1.4) – электромагнитный момент из вращающего становится тормозным, а машина из режима двигателя переходит в режим генератора и отдает энергию в сеть (рекуперация энергии). Переход машины из двигательного режима в генераторный иллюстрируется механической характеристикой (рис. 1.30). Пусть в двигательном режиме a1 – рабочая точка; ей соответствует момент М. Если частота вращения увеличивается, то рабочая точка по характеристике 1 из квадранта I переходит в квадрант II, например, в рабочую точку a2, которой соответствует частота вращения n΄ и тормозной момент – М΄.
Торможение противовключением возникает в работающем двигателе, когда направление тока в якоре или тока возбуждения переключается на противоположное. Электромагнитный момент при этом изменяет знак и становится тормозным.
Работе двигателя с противоположным направлением вращения соответствуют механические характеристики, располагающиеся в квадрантах II и III (например, естественная характеристика 2 на рис. 1.30).
Внезапный переход на эту характеристику практически недопустим, так как сопровождается чрезмерно большим броском тока и тормозного момента. По этой причине одновременно с переключением одной из обмоток в цепь якоря включается добавочное сопротивление Rдоб, ограничивающее ток якоря.
Механическая характеристика режима с Rдоб имеет большой наклон (прямая 3). При переходе в режим противовключения частота вращения n в первый момент измениться не может (из-за инерционности якоря) и рабочая точка из положения a1 перейдет в положение a3 на новой характеристике. Из-за появления Мтор частота вращения n будет быстро падать до тех пор, пока рабочая точка a3 не перейдет в положение a4, соответствующее остановке двигателя. Если в этот момент двигатель не отключить от источника питания, то якорь изменит направление вращения. Машина начнет работать в двигательном режиме с новым направлением вращения, а ее рабочая точка a5 будет находиться на механической характеристике 3 в квадранте III.
 Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т. Уравнение характеристики (1.6) принимает вид:
Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т. Уравнение характеристики (1.6) принимает вид:
n = 
что соответствует семейству прямых 4 (при разных Rд.т), проходящих через начало координат. При переключении в этот режим рабочая точка a1 переходит на одну из характеристик 4, например, в точку a6, а затем перемещается по прямой 4 до нуля. Якорь двигателя тормозится до полной остановки. Изменением сопротивления Rд.т можно регулировать ток якоря и скорость торможения.







