- Управление бесколлекторным двигателем постоянного тока с датчиками Холла
- Управление бесколлекторным двигателем с датчиками Холла (Sensored brushless motors)
- Мостовая схема ключей
- Диаграмма включения ключей
- ШИМ (PWM), частота, переходные процессы
- Потери на ключах
- Угол опережения фаз (timing)
- Схема регулятора скорости бесколлекторного двигателя (ESC)
- Схема регулятора
- Питание
- ШИМ и сигналы для ключей
- Обратная связь (контроль напряжения фаз двигателя)
- Датчики Холла
- Измерения аналоговых сигналов
- Задающие сигналы
- UART интерфейс
- Прочее
- Силовая часть
- Возможности прошивки
- Работа регулятора
- Включение
- Запуск
- Настройка регулятора
Управление бесколлекторным двигателем постоянного тока с датчиками Холла
Автор: AntonChip. Дата публикации: 30 апреля 2017 .

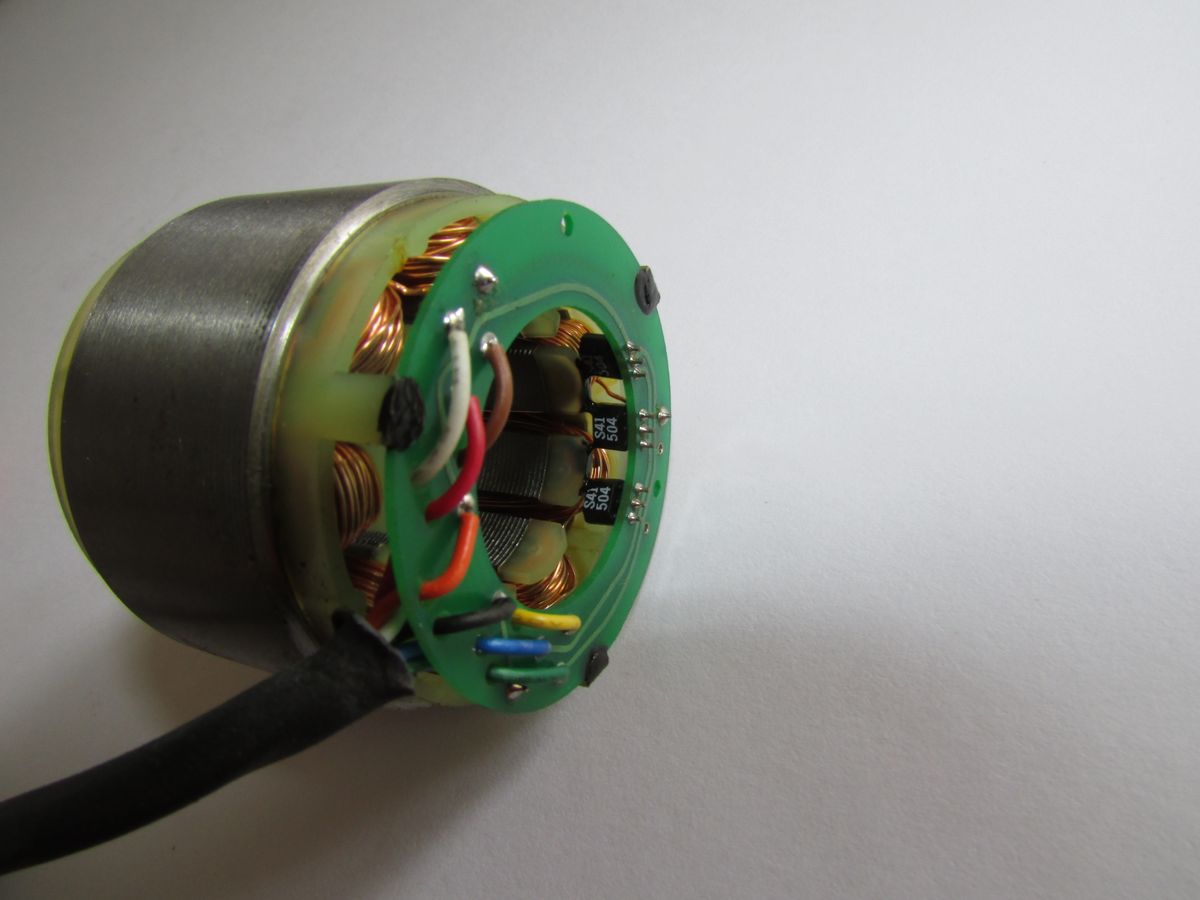
Бесколлекторные двигатели с датчиками Холла(Sensored brushless motors) применяются как тяговые, в электроприводах, где нужен высокий крутящий момент при низких оборотах. Переключение обмоток двигателя происходит по сигналу датчиков. Обычно они встроены в корпус двигателя. В зависимости от типа они могут быть аналоговыми или цифровыми, это следует учесть при написании программы. В моем двигателе датчики цифровые.

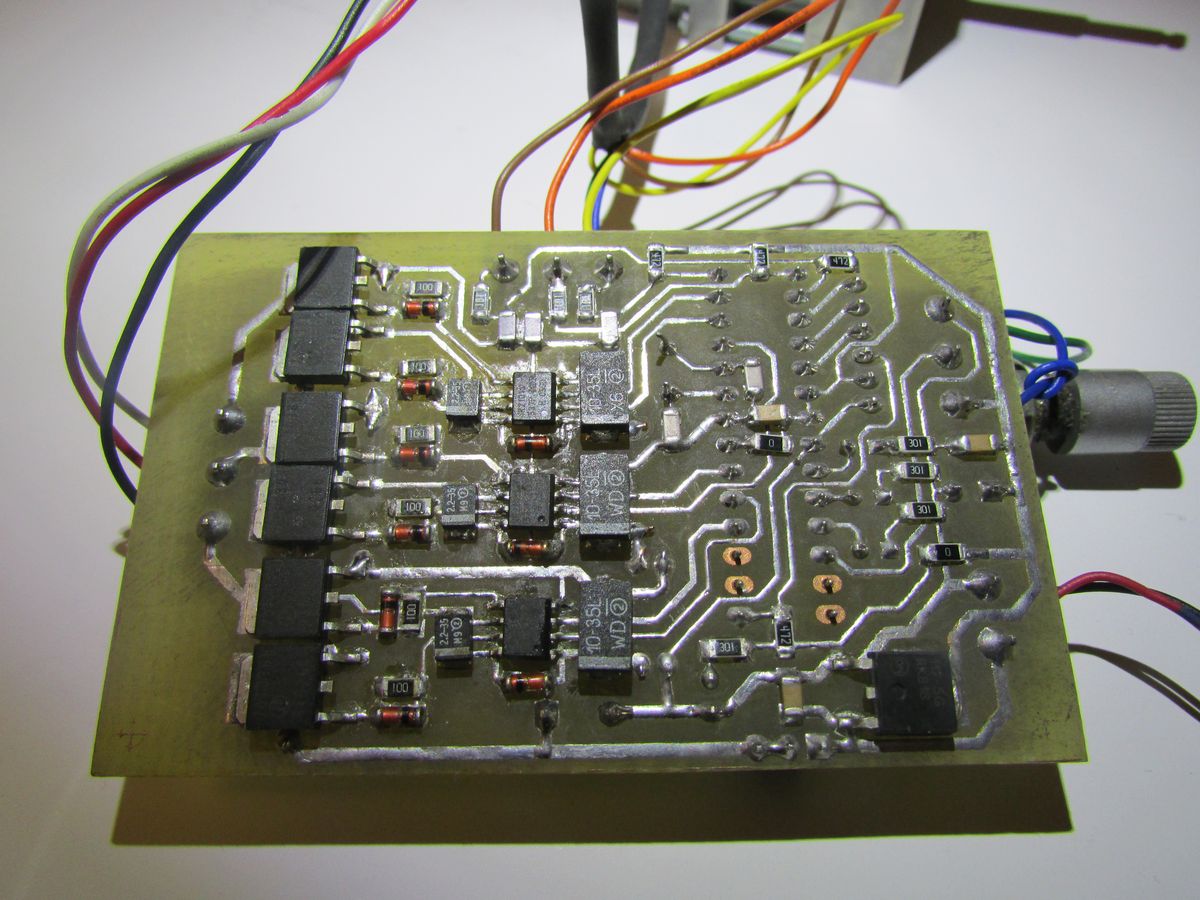
Силовая часть схемы остается прежней. Вместо сигналов обратной ЭДС мы будем обрабатывать сигналы с датчиков Холла. В большинстве случаев датчики Холла подключают к выводам внешних прерываний микроконтроллера. В этом примере мы используем контроллер Atmega48, так как у него внешние прерывания можно организовать на всех портах, в отличие от Atmega8. Тактирование осуществляется от внешнего кварца частотой 8МГц. Ниже показана схема контроллера:
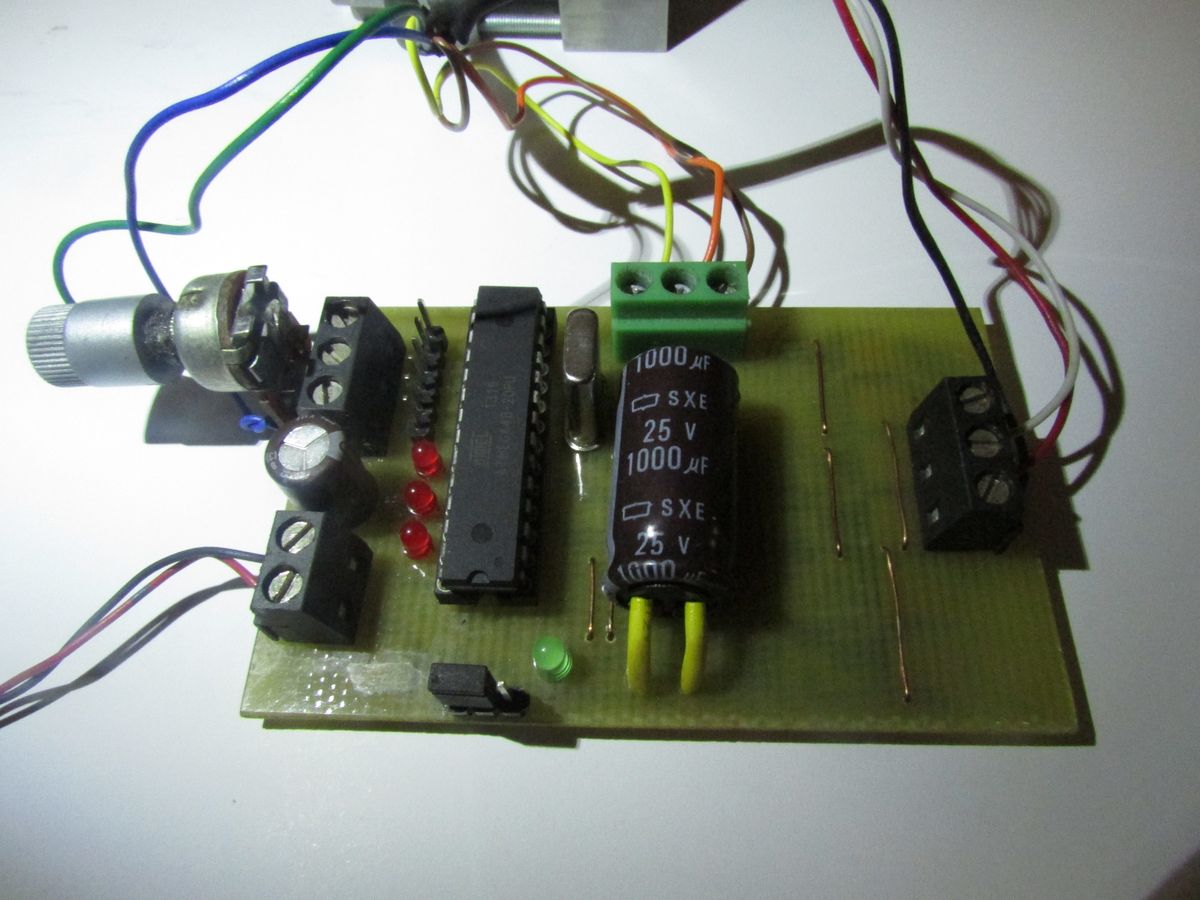
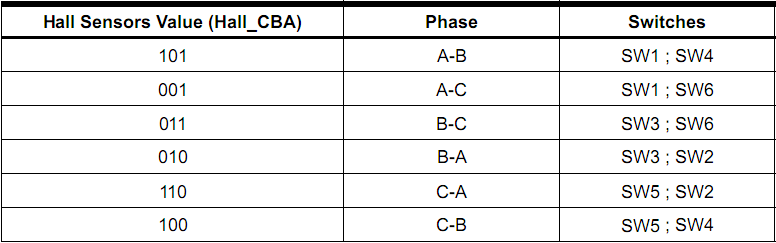
Регулировку частоты вращения вала двигателя сделаем при помощи переменного резистора, т.е. используем АЦП микроконтроллера. Потенциометр подключается к выводу ADC3. Результат преобразования напряжения записываем в регистры сравнения OCR0A, OCR0B и OCR2B, тем самым меняя значение ШИМ на выходе. Переключение обмоток двигателя происходит в обработчике внешнего прерывания. При считывании датчиков их значения записываются в переменную position, исходя из этого какая позиция будет записана в эту переменную, происходит переключение выходов согласно таблице ниже:

На схеме не показаны светодиоды(подключены к PC0-PC2), которые сигнализируют о состоянии каждого датчика, но в программе они задействованы.
Управление бесколлекторным двигателем с датчиками Холла (Sensored brushless motors)
Мы уже ознакомились с устройством бесколлекторного двигателя и теперь разберемся, как ним управлять.
Мостовая схема ключей
Диаграмма включения ключей
Таблица включения ключей в зависимости от сигналов датчиков Холла:
Анимированная демонстрация работы 4 полюсного двигателя:
ШИМ (PWM), частота, переходные процессы
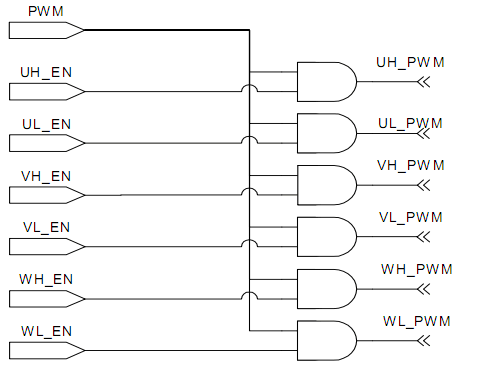 Некоторые микроконтроллеры могут аппаратно формировать ШИМ сигнал на нескольких своих выводах. Можно формировать ШИМ для каждого из ключей программно. В этом случае схему можно упростить, и не использовать логических элементов. Частота ШИМ сигнала обычно бывает от 4 до 80 килогерц.
Некоторые микроконтроллеры могут аппаратно формировать ШИМ сигнал на нескольких своих выводах. Можно формировать ШИМ для каждого из ключей программно. В этом случае схему можно упростить, и не использовать логических элементов. Частота ШИМ сигнала обычно бывает от 4 до 80 килогерц.
Во время включения и выключения ключей происходят переходные процессы, вследствие чего на ключах выделяется дополнительное тепло. Чем выше частота ШИМ сигнала, тем больше количество переходных процессов за единицу времени, и тем выше потери на ключах. Слишком малая частота может быть не эффективной или не обеспечивать необходимой плавности регулирования.
В случае с двигателями без датчиков, которые будут рассматриваться в следующих статьях, выбор частоты ШИМ сигнала играет очень важную роль.
Потери на ключах
P — теряемая мощность, которая выделяется в виде тепла R — прямое сопротивление открытого ключа I — ток, протекаемый через ключ.
Очевидно, что чем меньше сопротивление ключей, тем меньше потери на ключах. Уменьшение сопротивления ключей ведет к повышению общего КПД и уменьшению тепловыделения на ключах.
Уровень потерь на ключах имеет квадратичную зависимость от тока. Уменьшить ток, сохранив при этом общую мощность, можно повысив напряжение питания двигателя. В качестве примера рассмотрим два варианта:
1. Питание: 50В, ток: 100А, сопротивление ключей: 0,001 Ом. Потери на ключах = 0,001 * 100 2 = 10 Вт
2. Питание: 100В, ток: 50А, сопротивление ключей: 0,001 Ом. Потери на ключах = 0,001 * 50 2 = 2,5 Вт
Т.е. снизив ток вдвое потери на ключах падают в 4 раза.
Угол опережения фаз (timing)
Чтобы компенсировать эту задержку управляющий сигнал на ключи подают с опережением. Опережение управляющего сигнала выражают в угле опережения. Угол опережения может быть от 0 до 30 градусов. Речь идет об электрических градусах (см. Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя). Угол опережения может отличаться для каждой модели двигателя. Точность установки угла опережения сильно влияет на работу высоко-оборотистых двигателей. На малых скоростях точность установки угла опережения не столь критична.
Настройка угла опережения (timing) выполняется либо перемещением датчиков (некоторые двигатели оборудованы специальным приспособлением) либо корректируется программно средствами регулятора. Если двигатель имеет реверсивный режим (должен обеспечивать вращение в обе стороны), разумнее прибегнуть к программному методу.
Для лучшего понимания смысла угла опережения можно провести аналогию с двигателем внутреннего сгорания, где после подачи искры проходит некоторое время до воспламенения топлива. За это время вал двигателя успевает провернуться на некоторый угол. Для компенсации такой задержки устанавливают угол опережения зажигания.
Схема регулятора скорости бесколлекторного двигателя (ESC)
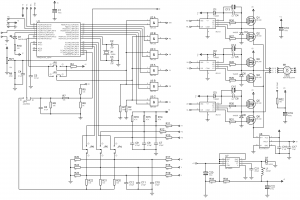
Схема условно разделена на две части: левая — микроконтроллер с логикой, правая — силовая часть. Силовую часть можно модифицировать для работы с двигателями другой мощности или с другим питающим напряжением.
Контроллер — ATMEGA168. Гурманы могут сказать, что хватило бы и ATMEGA88, а AT90PWM3 — это было бы «вааще по феншую». Первый регулятор я как раз делал «по феншую». Если у Вас есть возможность применять AT90PWM3 — это будет наиболее подходящий выбор. Но для моих задумок решительно не хватало 8 килобайт памяти. Поэтому я применил микроконтроллер ATMEGA168.
Эта схема задумывалась как испытательный стенд. На котором предполагалось создать универсальный настраиваемый регулятор для работы с различными «калибрами» бесколлекторных двигателей: как с датчиками, так и без датчиков положения. В этой статье я опишу схему и принцип работы прошивки регулятора для управления бесколлекторными двигателями с датчиками Холла и без датчиков.
Схема регулятора
Питание
ШИМ и сигналы для ключей
Обратная связь (контроль напряжения фаз двигателя)
Датчики Холла
Измерения аналоговых сигналов
На вход ADC3(PC3) поступает аналоговый сигнал от датчика тока. Датчик тока ACS756SA. Это датчик тока на основе эффекта Холла. Преимущество этого датчика в том, что он не использует шунт, а значит, имеет внутреннее сопротивление близкое к нулю, поэтому на нем не происходит тепловыделения. Кроме того, выход датчика аналоговый в пределах 5В, поэтому без каких-либо преобразований подается на вход АЦП микроконтроллера, что упрощает схему. Если потребуется датчик с большим диапазоном измерения тока, Вы просто заменяете существующий датчик новым, абсолютно не изменяя схему.
Если Вам хочется использовать шунт с последующей схемой усиления, согласования — пожалуйста.
Задающие сигналы
Кроме того, есть вход RC сигнала, который повсеместно используется в дистанционно управляемых моделях. Выбор управляющего входа и его калибровка выполняется в программных настройках регулятора.
UART интерфейс
Прочее
Светодиод, сигнализирующий о состоянии регулятора, подключен к выводу PD4.
Силовая часть
Ключи нужно выбирать в зависимости от максимального тока и напряжения питания двигателя (выбору ключей и драйверов будет посвящена отдельная статья). На схеме обозначены IR540, в реальности использовались K3069. K3069 рассчитаны на напряжение 60В и ток 75А. Это явный перебор, но мне они достались даром в большом количестве (желаю и Вам такого счастья).
Конденсатор С19 включается параллельно питающей батареи. Чем больше его емкость — тем лучше. Этот конденсатор защищает батарею от бросков тока и ключи от значительной просадки напряжения. При отсутствии этого конденсатора Вам обеспечены как минимум проблемы с ключами. Если подключать батарею сразу к VD — может проскакивать искра. Искрогасящий резистор R32 используется в момент подключения к питающей батарее. Сразу подключаем «—» батареи, затем подаем «+» на контакт Antispark. Ток течет через резистор и плавно заряжает конденсатор С19. Через несколько секунд, подключаем контакт батареи к VD. При питании 12В можно Antispark не делать.
Возможности прошивки
- возможность управлять двигателями с датчиками и без;
- для бездатчикового двигателя три вида старта: без определения первоначального положения; с определением первоначального положения; комбинированный;
- настройка угла опережения фазы для бездатчикового двигателя с шагом 1 градус;
- возможность использовать один из двух задающих входов: 1-аналоговый, 2-RC;
- калибровка входных сигналов;
- реверс двигателя;
- настройка регулятора по порту UART и получение данных от регулятора во время работы (обороты, ток, напряжение батареи);
- частота ШИМ 16, 32 КГц.
- настройка уровня ШИМ сигнала для старта двигателя;
- контроль напряжения батарей. Два порога: ограничение и отсечка. При снижении напряжения батареи до порога ограничения обороты двигателя понижаются. При снижении ниже порога отсечки происходит полная остановка;
- контроль тока двигателя. Два порога: ограничение и отсечка;
- настраиваемый демпфер задающего сигнала;
- настройка Dead time для ключей
Работа регулятора
Включение
После включения двигатель издает 1 короткий сигнал (если звук не отключен), включается и постоянно светится светодиод. Регулятор готов к работе.
Для запуска двигателя следует увеличивать величину задающего сигнала. В случае использования задающего потенциометра, запуск двигателя начнется при достижении задающего напряжения уровня примерно 0.14 В. При необходимости можно выполнить калибровку входного сигнала, что позволяет использовать раные диапазоны управляющих напряжений. По умолчанию настроен демпфер задающего сигнала. При резком скачке задающего сигнала обороты двигателя будут расти плавно. Демпфер имеет несимметричную характеристику. Сброс оборотов происходит без задержки. При необходимости демпфер можно настроить или вовсе отключить.
Запуск
При опрокидывании двигателя или механическом заклинивании ротора срабатывает защита, и регулятор пытается перезапустить двигатель.
Запуск двигателя с датчиками Холла также выполняется с применением настроек для старта двигателя. Т.е. если для запуска двигателя с датчиками дать полный газ, то регулятор подаст напряжение, которое указано в настройках для старта. И только после того, как двигатель начнет вращаться, будет подано полное напряжение. Это несколько нестандартно для двигателя с датчиками, поскольку такие двигатели в основном применяются как тяговые, а в данном случае достичь максимального крутящего момента на старте, возможно, будет сложно. Тем не менее, в данном регуляторе присутствует такая особенность, которая защищает двигатель и регулятор от выхода со строя при механическом заклинивании двигателя.
Во время работы регулятор выдает данные об оборотах двигателя, токе, напряжении батарей через порт UART в формате:
Данные выдаются с периодичностью примерно 1 секунда. Скорость передачи по порту 9600.
Настройка регулятора
Переход регулятора в режим настройки происходит при включении регулятора, когда задающий сигнал потенциометра больше нуля. Т.е. Для перевода регулятора в режим настройки следует повернуть ручку задающего потенциометра, после чего включить регулятор. В терминале появится приглашение в виде символа «>«. После чего можно вводить команды.
Регулятор воспринимает следующие команды (в разных версиях прошивки набор настроек и команд может отличаться):
h — вывод списка команд; ? — вывод настроек; c — калибровка задающего сигнала; d — сброс настроек к заводским настройкам.
команда «?» выводит в терминал список всех доступных настроек и их значение. Например: Изменить нужную настройку можно командой следующего формата:
pwm.start=15
Если команда была дана корректно, настройка будет применена и сохранена. Проверить текущие настройки после их изменения можно командой «?«.
Измерения аналоговых сигналов (напряжение, ток) выполняются с помощью АЦП микроконтроллера. АЦП работает в 8-ми битном режиме. Точность измерения занижена намеренно для обеспечения приемлемой скорости преобразования аналогового сигнала. Соответственно, все аналоговые величины регулятор выдает в виде 8-ми битного числа, т.е. от 0 до 255.
Список настроек, их описание:
| Параметр | Описание | Значение |
|---|---|---|
| motor.type | Тип мотора | 0-Sensorless; 1-Sensored |
| motor.magnets | Кол.во магнитов в роторе двигателя. Изпользуется только для расчета оборотов двигателя. | 0..255, шт. |
| motor.angle | Угол опережения фазы. Используется только для Sensorless двигателей. | 0..30, градусов |
| motor.start.type | Тип старта. Используется только для Sensorless двигателей. | 0-без определения положения ротора; 1-с определением положения ротора; 2-комбинированный; |
| motor.start.time | Время старта. | 0..255, мс |
| pwm | Частота PWM | 16, 32, КГц |
| pwm.start | Значение PWM (%) для старта двигателя. | 0..50 % |
| pwm.min | Значение минимального значения PWM (%), при котором двигатель вращается. | 0..30 % |
| voltage.limit | Напряжение батареи, при котором следует ограничивать мощность, подаваемую на двигатель. Указывается в показаниях ADC. | 0..255* |
| voltage.cutoff | Напряжение батареи, при котором следует выключать двигатель. Указывается в показаниях ADC. | 0..255* |
| current.limit | Ток, при котором следует ограничивать мощность, подаваемую на двигатель. Указывается в показаниях ADC. | 0..255** |
| current.cutoff | Ток, при котором следует выключать двигатель. Указывается в показаниях ADC. | 0..255** |
| system.sound | Включить/выключить звуковой сигнал, издаваемый двигателем | 0-выключен; 1-включен; |
| system.input | Задающий сигнал | 0-потенциометр; 1-RC сигнал; |
| system.damper | Демпфирование входного сигнала | 0..255, условные единицы |
| system.deadtime | Значение Dead Time для ключей в микросекундах | 0..2, мкс |
* — числовое значение 8-ми битного аналого цифрового преобразователя. Рассчитывается по формуле: ADC = (U*R6/(R5+R6))*255/5 Где: U — напряжение в Вольтах; R5, R6 — сопротивление резисторов делителя в Омах.
** — числовое значение 8-ми битного аналого цифрового преобразователя. Рассчитывается по формуле: ADC = U*255/5 Где: U — напряжение датчика тока в Вольтах, соответствующее требуемому току.
Фьюзы микроконтроллера должны быть выставлены на работу с внешним кварцем. Строка для программирования фьюзов с помощью AVRDUDE:
-U lfuse:w:0xFF:m -U hfuse:w:0xDC:m







