Схемы электропривода для двигателей постоянного тока
Приводы постоянного тока служат для управления двигателями постоянного тока. Правда не везде, а лишь там, где требуется плавное и точное регулирование скорости и вращающего момента электромотора в достаточно широких пределах.
Где же конкретно могут использоваться приводы постоянного тока? Для того, чтобы ответить на данный вопрос, нам надо вначале сказать несколько слов о принципе работы двигателя постоянного тока.
Вообще надо заметить, что электродвигатели — очень распространенный объект управления в различных устройствах и технических системах. Причем настолько, что без них вся наша современная жизнь очевидно вовсе не была бы такой уж и современной. Точнее мы бы так и не ушли далее технологий начала 19 века. И не имели бы не только компьютеров, с их гаджетами, но и вообще не знали бы, например, даже столь привычного нам электрического освещения, поскольку сами электрогенераторы – это, по сути, те же самые электродвигатели, но только преобразующие различные виды неэлектрической энергии (механическая, химическая или тепловая) в электрическую энергию.
Сами электродвигатели при этом, как известно, делятся на электродвигатели постоянного тока и электродвигатели переменного тока. Причем сегодня в силу бурного развития научно-технической мысли, которая предлагает более совершенные алгоритмы векторного управления и довольно дешевые и удобные в использовании частотники, именно последние приобретают все большую популярность в промышленности.
Однако, нельзя не сказать, что и двигатели постоянного тока рано еще списывать со счетов. Они имеют свои весьма важные и существенные преимущества. Дело в том, что один из «глобальных» минусов двигателя постоянного тока – это коллектор, его низкая механическая прочность, а также слабая механическая прочность щеток.
Но зато у двигателя постоянного тока можно менять скорости в достаточно широком диапазоне при относительном постоянстве момента на валу. При этом количество оборотов двигателя постоянного тока пропорционально величине напряжения, которое подается на якорную обмотку. А это значит, что в диапазоне скоростей от нуля до номинального значения электродвигатель может развивать полный крутящий момент. Именно поэтому двигатель постоянного тока широко используют в тех случаях, когда необходимо обеспечить большой момент при низких скоростях электродвигателя почти до его остановки при наличии полной нагрузки с последующим стартом. К таковым областям относятся электроприводы лифтов, кранов, ленточных конвейеров, смесителей, экструдеров и топу подобных механизмов.
Принцип действия двигателя постоянного тока
Вообще надо заметить, что самой первой из всех изобретенных в XIX веке вращающихся электромашин был именно электродвигатель постоянного тока. Сам принцип действия его известен с середины прошлого столетия и основан на том, что крутящий момент здесь создаётся путём взаимодействия между двумя магнитными полями — полем обмотки возбуждения и полем, создающимся обмотками во вращающемся якоре.
Впрочем, в некоторых моделях двигателей постоянного тока нет обмотки возбуждения, вместо нее установлены постоянные магниты, сохраняющее стационарное магнитное поле при любых рабочих условиях.
Принцип работы двигателя постоянного тока заключается в том, что ток, проходя через якорь, создаёт магнитное поле, которое пытается выровняться со стационарным полем. Происходит вращение двигателя/

Рис. 1. Схема двигателя постоянного тока
При этом коллектор (так называется набор сегментированных медных планок), разрывает электрический контакт с уже «выровненной» обмоткой и возбуждает другую обмотку (или как в простом примере, показанном выше, перевозбуждает ту же цепь в противоположном направлении), создавая другое не выровненное магнитное поле, которое продолжает вращать якорь. Электрический контакт между вращающимися сегментами коллектора и стационарным источником питания в этом случае происходит через угольные щетки. Поскольку здесь постоянно имеет место механическое трение, то эти щетки изнашиваются через определенное время (как и сам коллектор) и соответственно требуют своей периодической замены.
Впрочем, следует заметить, что большинство промышленных электродвигателей постоянного тока изготавливаются с несколькими обмотками якоря, а не с одной, как показано на упрощенной иллюстрации сверху.
В электродвигателях постоянного тока проявляются следующие отношения между механическими и электрическими величинами:
- Крутящий момент. Он прямо пропорционален силе магнитного поля якоря, которая, в свою очередь, прямо пропорциональна току, проходящему через обмотки якоря. Так же момент прямо пропорционален силе постоянного магнитного поля, которое, в свою очередь, прямо пропорционально току, проходящему через возбуждающую обмотку (в двигателе без магнитов).
- Скорость. Скорость ограничена ЭДС, генерируемой якорем при вращении в постоянном магнитном поле. Эта ЭДС прямо пропорциональна скорости вращения якоря, и также прямо пропорциональна силе постоянного магнитного поля (которая прямо пропорциональна току возбуждающей обмотки в электродвигателе без магнитов). Это значит, что скорость прямо пропорциональна напряжению якоря, а также обратно пропорциональна силе постоянного магнитного поля, которая прямо пропорциональна току, проходящему через возбуждающие обмотки (в двигателе без магнитов).
Управление двигателем постоянного тока
Последнее же означает, что, меняя тока обмотки, можно изменять соотношение между скоростью и моментом. Однако этого недостаточно для управления общей мощностью двигателя. Чтобы управлять выходной мощностью электродвигателя постоянного тока также необходимо управлять напряжением и током якоря. Для этой цели можно было бы использовать переменные резисторы, но этот метод не используется в настоящее время, так как приводит к потере мощности. Лучшим решением здесь будет применение электронной схемы регулирования мощности на транзисторных ключах быстро отключающих и включающих якорь двигателя в цепь. Такой тип управления называется широтно-импульсной модуляцией, или ШИМ.

Рис.2. Схема управления скоростью и моментом ДПТ
По традиционной технологии для импульсного питания двигателя постоянного тока используют схему управляемого выпрямителя, в котором для преобразования переменного тока в постоянный вместо обычных выпрямляющих диодов используют тиристоры (управляемая схема Ларионова). Основным источником питания промышленных двигателей постоянного тока остается переменный ток, и этот переменный ток должен быть преобразован в постоянный в некотором узле системы; управление имеет смысл интегрировать прямо в этот выпрямительный узел.

Рис.3. Схема управляемого выпрямителя
Схема управляемого выпрямителя работает по принципу изменения времени «пускового» импульса относительно импульсов колебаний переменного тока. Чем раньше в каждом периоде переменного тока откроется тиристор, тем дольше он будет пропускать ток к двигателю. Схема фазового управления отвечает за генерацию импульсов и их длительность.
Отсюда следует, что привод постоянного тока просто регулирующий подводимую мощность к двигателю был бы трудно регулируемым и не применим в большинстве задач. Для управления двигателем необходимо управлять скоростью. Поэтому на двигателях постоянного тока устанавливают тахогенераторы, механически соединённые с валом двигателя.
Тахогенератор представляет собой небольшой генератор, создающий постоянное напряжение, прямо пропорциональное скорости вращения вала, обычно с выходом 0-10В постоянного тока, реже 0-220В переменного тока. По его показаниям регулируемый привод постоянного тока регулирует электрическую мощность, подводимую к двигателю так, чтобы скорость вращения совпала с заданной управляющим сигналом. Имея датчик обратной связи для регулирования скорости, привод постоянного тока точно регулирует скорость вращения двигателем.

Рис. 4. Схема управления двигателем постоянного тока
Менять ли привод постоянного тока?
Следует заметить, что в силу длительного периода широкого применения двигателей постоянного тока, на протяжении довольно долгого времени для регулировки скорости вала двигателя использовались приводы постоянного тока. Тем самым, данные приводы имели широкое распространение и были установлены на огромном количестве различных машин, механизмов и оборудовании. Но вот в чем проблема – дело в том, что раньше приводы постоянного тока выпускались с управлением на аналоговых микросхемах. А это вело к длительной настройке оборудования, необходимости постоянного обслуживания привода и частой его перенастройки. В результате против двигателей постоянного тока и соответственно приводов постоянного тока сложилось предубеждение о ненужности и даже вредности установки таких систем. Повсеместно обозначилась тенденция к замене «постоянников» на «переменники». И где-то это и правда оказалось оправдано, но…
Увы, но часто «дьявол кроется в деталях»!
Следует заметить, что сейчас приводы постоянного тока выпускаются с фазными схемами управления, основанными на современных микропроцессорах. А это значит, что они стали значительно более надежны и, ГЛАВНОЕ, не нуждаются в необходимости постоянного обслуживания привода и частой перенастройки приводов. А поскольку вопреки публикациям в СМИ и доводам производителей приводов переменного тока, существует еще немало таких применений, где приводы постоянного тока являются предпочтительными по своему функционалу (а в конечном счете и по деньгам), то возможно при модернизации оборудования следует обратить внимание на приводы постоянного тока.
Более того, сегодня необходимо учитывать, что очень часто, при модернизации систем управления, простая замена устаревших приводов постоянного тока новыми современными приводами постоянного тока, является экономически более выгодной!
Подумайте! Возможно это Ваш случай? Причем в данном случае имеет смысл обратить именно на лидеров по производству приводов постоянного тока, одним из которых является фирма Siemens, выпускающая приводы постоянного тока серии SINAMICS DCM — современный мощный привод постоянного тока со многими дополнительными модулями расширения, интеграции в промышленные сети и встроенными функциями для решения типовых технологических задач (намотка-размотка и т. д.).
Схемы электродвигателей постоянного тока и их характеристики
 Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
1. с независимым возбуждением : обмотка возбуждения питается от постороннего источника постоянного тока (возбудителя или выпрямителя) ,
2. с параллельным возбуждением : обмотка возбуждения подключена параллельно обмотке якоря,
3. с последовательным возбуждением : обмотка возбуждения включена последовательно с обмоткой якоря,
4. со смешанным возбуждением : он имеет две обмотки возбуждения, одна подключена параллельно обмотке якоря, а другая — последовательно с ней.
Все эти электродвигатели имеют одинаковое устройство и отличаются лишь выполнением обмотки возбуждения. Обмотки возбуждения указанных электродвигателей выполняют так же, как у соответствующих генераторов .
Электродвигатель постоянного тока с независимым возбуждением
В этом электродвигателе (рис. 1, а) обмотка якоря подключена к основному источнику постоянного тока (сети постоянного тока, генератору или выпрямителю) с напряжением U, а обмотка возбуждения — к вспомогательному источнику в напряжением UB. В цепь обмотки возбуждения включен регулировочный реостат Rрв, а в цепь обмотки якоря — пусковой реостат Rn.
Регулировочный реостат служит для регулирования частоты вращения якоря двигателя, а пусковой — для ограничения тока в обмотке якоря при пуске. Характерной особенностью электродвигателя является то, что его ток возбуждения Iв не зависит от тока Iя в обмотке якоря (тока нагрузки). Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя Ф не зависит от нагрузки. Зависимости электромагнитного момента М и частоты вращения n от тока Iя будут линейными (рис. 2, а). Следовательно, линейной будет и механическая характеристика двигателя — зависимость п (М) (рис. 2, б).
При отсутствии в цепи якоря реостата с сопротивлением Rn скоростная и механическая характеристики будут жесткими, т. е. с малым углом наклона к горизонтальной оси, так как падение напряжения IяΣRя в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3—5 % от Uном. Эти характеристики (прямые 1 на рис. 2, а и б) называются естественными. При включении в цепь якоря реостата с сопротивлением Rn угол наклона этих характеристик возрастает, вследствие чего можно получить семейство реостатных характеристик 2, 3 и 4, соответствующих различным значениям Rn1, Rn2 и Rn3.
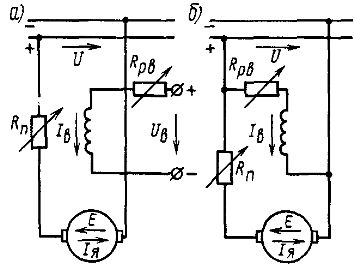
Рис. 1. Принципиальные схемы электродвигателей постоянного тока с независимым (а) и параллельным (б) возбуждением
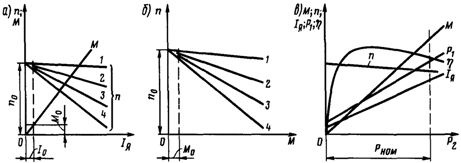
Рис. 2. Характеристики электродвигателей постоянного тока с независимым и параллельным возбуждением : а — скоростные и моментная, б — механические, в — рабочие Чем больше сопротивление Rn, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Регулировочный реостат Rpв позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. При этом будет изменяться и частота вращения n.
В цепь обмотки возбуждения никаких выключателей и предохранителей не устанавливают, так как при разрыве этой цепи резко уменьшается магнитный поток электродвигателя (в нем остается лишь поток от остаточного магнетизма) и возникает аварийный режим. Если электродвигатель работает при холостом ходе или небольшой нагрузке на валу, то частота вращения резко возрастает (двигатель идет вразнос). При этом сильно увеличивается ток в обмотке якоря Iя и может возникнуть круговой огонь. Во избежание этого защита должна отключить электродвигатель от источника питания.
Резкое увеличение частоты вращения при обрыве цепи обмотки возбуждения объясняется тем, что в этом случае резко уменьшаются магнитный поток Ф (до значения потока Фост от остаточного магнетизма) и э. д. с. Е и возрастает ток Iя. А так как приложенное напряжение U остается неизменным, то частота вращения n будет увеличиваться до тех пор, пока э. д. с. Е не достигнет значения, приблизительно равного U (что необходимо для равновесного состояния электрической цепи якоря, при котором E= U — IяΣRя.
При нагрузке на валу, близкой к номинальной, электродвигатель в случае разрыва цепи возбуждения остановится, так как электромагнитный момент, который может развить двигатель при значительном уменьшении магнитного потока, уменьшается и станет меньше нагрузочного момента на валу. В этом случае так же резко увеличивается ток Iя, и машина должна быть отключена от источника питания.
Следует отметить, что частота вращения n0 соответствует идеальному холостому ходу, когда двигатель не потребляет из сети электрической энергии и его электромагнитный момент равен нулю. В реальных условиях в режиме холостого хода двигатель потребляет из сети ток холостого хода I0, необходимый для компенсации внутренних потерь мощности, и развивает некоторый момент M0, требуемый для преодоления сил трения в машине. Поэтому в действительности частота вращения при холостом ходе меньше n0.
Зависимость частоты вращения n и электромагнитного момента М от мощности Р2 (рис. 2, в) на валу двигателя, как следует из рассмотренных соотношений, является линейной. Зависимости тока обмотки якоря Iя и мощности Р1 от Р2 также практически линейны. Ток Iя и мощность Р1 при Р2 = 0 представляют собой ток холостого хода I0 и мощность Р0, потребляемую при холостом ходе. Кривая к. п. д. имеет характер, общий для всех электрических машин.
Электродвигатель постоянного тока с параллельным возбуждением
В этом электродвигателе (см. рис. 1, б) обмотки возбуждения и якоря питаются от одного и того же источника электрической энергии с напряжением U. В цепь обмотки возбуждения включен регулировочный реостат Rpв, а в цепь обмотки якоря — пусковой реостат Rп.
В рассматриваемом электродвигателе имеет место, по существу, раздельное питание цепей обмоток якоря и возбуждения, вследствие чего ток возбуждения Iв не зависит от тока обмотки якоря Iв. Поэтому электродвигатель с параллельным возбуждением будет иметь такие же характеристики, как и двигатель с независимым возбуждением. Однако двигатель с параллельным возбуждением работает нормально только при питании от источника постоянного тока с неизменным напряжением.
При питании электродвигателя от источника с изменяющимся напряжением (генератор или управляемый выпрямитель) уменьшение питающего напряжения U вызывает соответствующее уменьшение тока возбуждения Iв и магнитного потока Ф, что приводит к увеличению тока обмотки якоря Iя. Это ограничивает возможность регулирования частоты вращения якоря путем изменения питающего напряжения U. Поэтому электродвигатели, предназначенные для питания от генератора или управляемого выпрямителя, должны иметь независимое возбуждение.
Электродвигатель постоянного тока с последовательным возбуждением
Для ограничения тока при пуске в цепь обмотки якоря включен пусковой реостат Rп (рис. 3, а), а для регулирования частоты вращения параллельно обмотке возбуждения может быть включен регулировочный реостат Rрв.
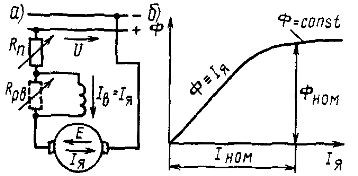
Рис. 3. Принципиальная схема электродвигателя постоянного тока с последовательным возбуждением (а) и зависимость его магнитного потока Ф от тока Iя в обмотке якоря (б)
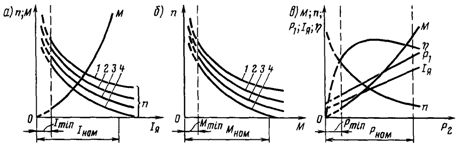
Рис. 4. Характеристики электродвигателя постоянного тока с последовательным возбуждением: а — скоростные и моментная, б — механические, в — рабочие.
Характерной особенностью этого электродвигателя является то, что его ток возбуждения Iв равен или пропорционален (при включении реостата Rpв) току обмотки якоря Iя, поэтому магнитный поток Ф зависит от нагрузки двигателя (рис. 3, б).
При токе обмотки якоря Iя, меньшем (0,8—0,9) номинального тока Iном магнитная система машины не насыщена и можно считать, что магнитный поток Ф изменяется прямо пропорционально току Iя. Поэтому скоростная характеристика электродвигателя будет мягкая — с увеличением тока Iя частота вращения n будет резко уменьшаться (рис. 4, а). Уменьшение частоты вращения n, происходит из-за увеличения падения напряжения IяΣRя. во внутреннем сопротивлении Rя. цепи обмотки якоря, а также из-за увеличения магнитного потока Ф.
Электромагнитный момент М при увеличении тока Iя будет резко возрастать, так как в этом случае увеличивается и магнитный поток Ф, т. е. момент М будет пропорционален току Iя. Поэтому при токе Iя, меньшем (0,8 Н- 0,9) Iном, скоростная характеристика имеет форму гиперболы, а моментная — параболы.
При токах Iя > Iном зависимости М и п от Iя линейны, так как в этом режиме магнитная цепь будет насыщена и магнитный поток Ф при изменении тока Iя меняться не будет.
Механическая характеристика, т. е. зависимость n от М (рис. 4, б), может быть построена на основании зависимостей n и М от Iя. Кроме естественной характеристики 1, можно путем включения в цепь обмотки якоря реостата с сопротивлением Rп получить семейство реостатных характеристик 2, 3 и 4. Эти характеристики соответствуют различным значениям Rn1, Rn2 и Rn3, при этом чем больше Rn, тем ниже располагается характеристика.
Механическая характеристика рассматриваемого двигателя мягкая и имеет гиперболический характер. При малых нагрузках магнитный поток Ф сильно уменьшается, частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.).
Обычно минимально допустимая нагрузка для двигателей большой и средней мощности составляет (0,2 …. 0,25) Iном. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой), применение ременной передачи или фрикционной муфты недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют, особенно там, где имеют место изменения нагрузочного момента в широких пределах и тяжелые условия пуска: во всех тяговых приводах (электровозы, тепловозы, электропоезда, электрокары, электропогрузчики и пр.), а также в приводах грузоподъемных механизмов (краны, лифты и пр.).
Объясняется это тем, что при мягкой характеристике увеличение нагрузочного момента приводит к меньшему возрастанию тока и потребляемой мощности, чем у двигателей с независимым и параллельным возбуждением, поэтому двигатели с последовательным возбуждением лучше переносят перегрузки. Кроме того, эти двигатели имеют большой пусковой момент, чем двигатели с параллельным и независимым возбуждением, так как при увеличении тока обмотки якоря при пуске соответственно увеличивается и магнитный поток.
Если принять, например, что кратковременный пусковой ток может в 2 раза превышать номинальный рабочий ток машины, и пренебречь влиянием насыщения, реакцией якоря и падением напряжения в цепи его обмотки, то в двигателе с последовательным возбуждением пусковой момент будет в 4 раза больше номинального (в 2 раза увеличиваются и ток, и магнитный поток), а в двигателях с независимым и параллельным возбуждением — только в 2 раза больше.
В действительности из-за насыщения магнитной цепи магнитный поток не увеличивается пропорционально току, но все же пусковой момент двигателя с последовательным возбуждением при прочих равных условиях будет значительно больше пускового момента такого же двигателя с независимым или параллельным возбуждением.
Зависимости n и М от мощности Р2 на валу электродвигателя (рис. 4, в), как следует из рассмотренных выше положений, являются нелинейными, зависимости P1, Iя и η от Р2 имеют такую же форму, как и у двигателей с параллельным возбуждением.
Электродвигатель постоянного тока со смешанным возбуждением
В этом электродвигателе (рис. 5, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной (или независимой) и последовательной, по которым проходят токи возбуждения Iв1 и Iв2 = Iя

где Фпосл — магнитный поток последовательной обмотки, зависящий от тока Iя, Фпар — магнитный поток параллельной обмотки, который не зависит от нагрузки (определяется током возбуждения Iв1).
Механическая характеристика электродвигателя со смешанным возбуждением (рис. 5, б) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения магнитодвижущих сил параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (кривая 3 при малой м. д. с. последовательной обмотки) или к характеристике 2 (кривая 4 при малой м. д. с. параллельной обмотки).
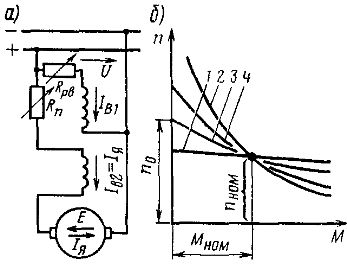
Рис. 5. Принципиальная схема электродвигателя со смешанным возбуждением (а) и его механические характеристики (б)
Достоинством двигателя постоянного тока со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, когда Фпосл=0. В этом режиме частота вращения его якоря определяется магнитным потоком Фпар и имеет ограниченное значение (двигатель не идет вразнос).







