- Подключение моторчика к Ардуино
- Управление двигателем на Ардуино
- Как подключить моторчик к Arduino
- Скетч. Подключение мотора напрямую
- Пояснения к коду:
- Скетч. Подключение мотора через транзистор
- Пояснения к коду:
- Скетч. Подключение мотора через драйвер
- Как подключить электродвигатель к Arduino
- 1 Что такое драйвер двигателей и для чего он нужен
- 2 Схема подключения коллекторного двигателяи драйвера двигателей к Arduino
- 3 Скетч для управления коллекторным двигателем
- 4 Управление шаговым двигателем с помощью Arduino
- Драйверы двигателя L298N, L293D и Arduino Motor Shield
- Драйвер двигателя в проектах ардуино
- Для чего нужен драйвер двигателя?
- Микросхема или плата расширения Motor Shield
- Принцип действия H-моста
- Драйвер двигателя L298N
- Распиновка микросхемы L298N:
- Драйвер двигателя L293D
- Драйвер двигателя на микросхеме HG7881
- Характеристики драйвера HG7881:
- Распиновка:
- Сравнение модулей
- Подключение L298N к Arduino
Подключение моторчика к Ардуино

Подключение мотора к Ардуино ► потребуется при сборке машинки или катера. Рассмотрим различные варианты подключения коллекторного двигателя к Arduino.
Подключение мотора постоянного тока к Ардуино (коллекторного двигателя) требуется при сборке машинки или катера на микроконтроллере Arduino. Рассмотрим различные варианты подключения двигателей постоянного тока: напрямую к плате, через биполярный транзистор, а также с использованием модуля L298N. В обзоре размещены схемы подключения и коды программ для всех перечисленных вариантов.
Управление двигателем на Ардуино
Коллекторный моторчик может быть рассчитан на разное напряжения питания. Если двигатель работает от 3-5 Вольт, то можно моторчик подключать напрямую к плате Ардуино. Моторы для машинки с блютуз управлением, которые идут в комплекте с редукторами и колесами рассчитаны уже на 6 Вольт и более, поэтому ими следует управлять через полевой (биполярный) транзистор или через драйвер L298N.
Принцип работы и устройство мотора постоянного тока
На схеме показано устройство моторчика постоянного тока и принцип его работы. Как видите, для того, чтобы ротор двигателя начал крутиться к нему необходимо подключить питание. При смене полярности питания, ротор начнет крутиться в обратную сторону. Драйвер двигателей L298N позволяет инвертировать направление вращения мотора fa 130, поэтому его удобнее использовать в своих проектах.
Как подключить моторчик к Arduino
Для этого занятия нам потребуется:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- мотор постоянного тока (Motor DC);
- транзистор полевой/биполярный;
- драйвер двигателей L298N;
- провода «папа-папа», «папа-мама».
Перед выбором способа управления двигателем от Arduino Uno r3, уточните на какое напряжение рассчитан ваш моторчик. Если питание требуется более 5 Вольт, то следует использовать транзистор или драйвер. Распиновка транзисторов может отличаться от приведенного примера (следует уточнить распиновку для своего типа). Драйвер L298N позволит не только включать мотор, но и изменять направление вращения.
Скетч. Подключение мотора напрямую
Подключение мотора к Ардуино напрямую — самый простой вариант включения вентилятора на Arduino или машинки. Команда для включения двигателя не отличается, от команды при подключении светодиода к микроконтроллеру. Функция digitalWrite включает/выключает подачу напряжения на цифровой порт, к которому подключен двигатель постоянного тока. Соберите схему и загрузите программу.
Пояснения к коду:
- для подключения мотора без драйвера можно использовать любой порт;
- если двигатель не включается, то, возможно, не хватает силы тока на цифровом выходе, подключите двигатель через транзистор к порту 3,3V или 5V.
Скетч. Подключение мотора через транзистор
Подключение мотора через транзистор к Ардуино потребуется, если двигатель никак не хочет включаться от платы напрямую, то следует использовать порт 5 Вольт на микроконтроллере или внешний источник питания. Транзистор будет играть роль ключа, замыкая/размыкая электрическую цепь. Сам транзистор управляется цифровым портом. Соберите схему, как на картинке и загрузите программу.
Подключение FA-130 мотора постоянного тока — Motor DC Arduino
Пояснения к коду:
- при необходимости можно подключить два мотора FA-130 к Ардуино;
- в зависимости от характеристик, двигатель подключается к 3,3 или 5 Вольтам.
Скетч. Подключение мотора через драйвер
Подключение мотора к Ардуино через драйвер L298N или Motor Shield L293D позволит менять направление вращения ротора. Но для использования данных модулей потребуется установить соответствующие библиотеки для Ардуино. В примере мы использовали схему подключения двигателя с помощью модуля L298N. Соберите схему, как на картинке ниже и загрузите следующий скетч с использованием.
Как подключить электродвигатель к Arduino
Как известно, электродвигатели бывают трёх основных типов: коллекторные, шаговые и сервоприводы. В данной статье мы рассмотрим подключение коллекторного электродвигателя к Arduino с помощью драйвера двигателей на основе микросхемы L9110S или аналогичной.
Для проекта нам понадобятся:
1 Что такое драйвер двигателей и для чего он нужен
Максимальный ток на выводах Arduino слаб (около 50 мА) для такой мощной нагрузки как электромотор (десятки и сотни миллиампер). Поэтому напрямую к выводам Arduino подключать электродвигатель нельзя: есть риск сжечь вывод, к которому подключён двигатель. Для безопасного подключения электродвигателей разных типов к Arduino необходим самодельный или промышленно изготовленный т.н. драйвер двигателей. Драйверы двигателей бывают разные, для их работы часто используются микросхемы типа HG788, L9110S, L293D, L298N и другие. Драйверы двигателей имеют выводы подачи питания, выводы для подключения электродвигателей, а также управляющие выводы.
 Различные варианты исполнения драйверов двигателей
Различные варианты исполнения драйверов двигателей
В данной статье мы будем использовать драйвер для управления двигателями, сделанный на основе микросхемы L9110S. Обычно выпускаются платы, которые поддерживают подключение нескольких двигателей. Но для демонстрации мы обойдёмся одним.
2 Схема подключения коллекторного двигателяи драйвера двигателей к Arduino
Самые простые электродвигатели – коллекторные двигатели. У таких моторов всего два управляющих контакта. В зависимости от полярности приложенного к ним напряжения меняется направление вращения вала двигателя, а величина приложенного напряжения изменяет скорость вращения.
Давайте подключим двигатель по приложенной схеме. Питание драйвера двигателя – 5 В от Arduino, для управления скоростью вращения ротора мотора управляющие контакты подключаем к выводам Ардуино, поддерживающим ШИМ (широтно-импульсную модуляцию).
 Схема подключения коллекторного двигателя к Arduino с помощью драйвера двигателей
Схема подключения коллекторного двигателя к Arduino с помощью драйвера двигателей
Должно получиться что-то подобное:
 Двигатель подключён к драйверу двигателей и Arduino
Двигатель подключён к драйверу двигателей и Arduino
3 Скетч для управления коллекторным двигателем
Напишем скетч для управления коллекторным двигателем. Объявим две константы для ножек, управляющих двигателем, и одну переменную для хранения значения скорости. Будем передавать в последовательный порт значения переменной Speed и менять таким образом скорость (значением переменной) и направление вращения двигателя (знаком числа).
Загрузим скетч в память Arduino. Запустим его. Вал двигателя не вращается. Чтобы задать скорость вращения, нужно передать в последовательный порт значение от 0 до 255. Направление вращения определяется знаком числа.
Подключимся с помощью любой терминалки к порту, передадим число «100» – двигатель начнёт вращаться со средней скоростью. Если подадим «минус 100», то он начнёт вращаться с той же скоростью в противоположном направлении.
 Управление электромотором с помощью драйвера двигателей и Arduino
Управление электромотором с помощью драйвера двигателей и Arduino
А вот так выглядит подключение подключение коллекторного двигателя к Arduino в динамике:
4 Управление шаговым двигателем с помощью Arduino
Шаговый двигатель позволяет вращать ротор на определённый угол. Это бывает полезно, когда необходимо задать положение какому-либо механизму или его узлу. Шагом двигателя называется минимальный угол, на который можно повернуть ротор двигателя. Угол поворота и направление движения задаются в управляющей программе. Существует большое разнообазие шаговых двигателей. Рассмотрим работу с ними на примере двигателя 28BYJ-48 с драйвером ULN2003.
 Шаговый двигатель с контроллером —>
Шаговый двигатель с контроллером —>  Шаговый двигатель с контроллером
Шаговый двигатель с контроллером
Характеристики двигателя 28BYJ-48:
| Характеристика | Значение |
|---|---|
| Количество фаз | 4 |
| Напряжение питания | от 5 до 12 В |
| Число шагов | 64 |
| Размер шага | 5,625° |
| Скорость вращения | 15 об./сек |
| Крутящий момент | 450 г/см |
Модуль с микросхемой драйвера для управления шаговым двигателем выглядит так:
 Модуль с драйвером ULN2003
Модуль с драйвером ULN2003
На входы IN1…IN4 подаются управляющие сигналы от Arduino. Используем любые 4 цифровых пина, например, D8…D11. На вход питания необходимо подать постоянное напряжение от 5 до 12 В. Двигателю желательно обеспечить отдельное питание. Но в данном случае, т.к. не планируется использовать двигатель на постоянной основе, можно подать питание и от Arduino. Перемычка «Вкл/выкл» просто разрывает «плюс» питания, подаваемого на драйвер. В «боевом» изделии сюда можно, например, коммутировать питание с помощью реле, когда это необходимо, чтобы снизить потребление всего изделия. Итак, схема подключения будет такой:
 Схема подключения шагового двигателя с драйвером ULN2003 к Arduino
Схема подключения шагового двигателя с драйвером ULN2003 к Arduino
Соберём всё по схеме.
 Подключение шагового двигателя 28BYJ-48 к Arduino
Подключение шагового двигателя 28BYJ-48 к Arduino
Для Arduino «из коробки» существует готовая библиотека для управления шаговыми двигателями. Она называется Stepper. Можно посмотреть готовые примеры в среде разработки для Arduino: File Examples Stepper. Они позволяют управлять шаговым двигателем, изменяя скорость и направление движения, поворачивать ротор на заданный угол. Как говорится – бери и пользуйся. Но давайте попробуем разобраться с принципом работы шагового двигателя самостоятельно, не применяя никаких библиотек.
Двигатель 28BYJ-48 имеет 4 фазы. Это означает, что у него имеются 4 электромагнитные катушки, которые под действием электрического тока притягивают сердечник. Если напряжение подавать на катушки поочерёдно, это заставит сердечник вращаться. Рисунок иллюстрирует данный принцип.
 Схема работы шагового двигателя
Схема работы шагового двигателя
Здесь на (1) напряжение подано на катушки A и D, на (2) – на A и B, (3) – B и С, (4) – C и D. Далее цикл повторяется. И таким образом ротор двигателя вращается по кругу.
Напишем самый простой скетч для уравления шаговым двигателем. В нём просто будем вращать двигатель с постоянной скоростью в одном направлении, используя только что описанный принцип.
Простейший скетч управления шаговым двигателем (разворачивается)
Как можно догадаться, задержка del определяет скорость вращения двигателя. Уменьшая или увеличивая её можно ускорять или замедлять двигатель.
Если загрузить этот скетч, то увидим, что шаговый двигатель вращается против часовой стрелки. Соответственно, можно вынести цикл вращения в одну сторону в отдельную функцию rotateCounterClockwise(). И сделать аналогичную функцию вращения в противоположную сторону rotateClockwise(), в которой фазы будут следовать в обратном порядке. Также вынесем в отдельные функции каждую из 4-х фаз чтобы избежать дублирования одинакового кода в нескольких местах программы. Теперь скетч выглядит несколько интереснее:
Скетч управления шаговым двигателем (разворачивается)
Если мы загрузим скетч и проверим, поворачивается ли ротор двигателя на целый оборот, если один раз вызвать функцию rotateClockwise(), то обнаружим, что нет. Для совершения полного оборота функцию необходимо вызвать несколько раз. Соответственно, хорошо бы добавить в качестве аргумента функции число, которое будет показывать количество раз, которые она должна выполняться.
Финальный скетч управления шаговым двигателем (разворачивается)
Вот теперь совсем другое дело! Мы можем управлять скоростью шагового двигателя, задавая задержку после каждой фазы. Мы можем менять направление движения ротора двигателя. И, наконец, мы умеем поворачивать ротор на некоторый угол. Осталось только определить, какое число необходимо передавать в функции поворота rotateClockwise() и rotateCounterClockwise(), чтобы ротор шагового двигателя 1 раз провернулся на 360° вокруг своей оси. Собственно, дальнейшие наработки – вопрос фантазии или необходимости.
Драйверы двигателя L298N, L293D и Arduino Motor Shield
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
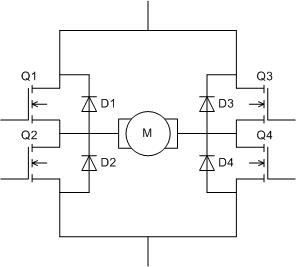 Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 0 | 0 | 1 | Поворот мотора вправо |
| 0 | 1 | 1 | 0 | Поворот мотора влево |
| 0 | 0 | 0 | 0 | Свободное вращение |
| 0 | 1 | 0 | 1 | Торможение |
| 1 | 0 | 1 | 0 | Торможение |
| 1 | 1 | 0 | 0 | Короткое замыкание |
| 0 | 0 | 1 | 1 | Короткое замыкание |
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:

Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).

При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.

Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V – 5V, Vmotor – 5 V, 0V – GND. Пример подключения одного двигателя к Ардуино показан на рисунке.

Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.

Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc – напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB – вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| 0 | 0 | Остановка |
| 1 | 0 | Двигается вперед |
| 0 | 1 | Двигается назад |
| 1 | 1 | Отключение |
Подключение одного двигателя к Ардуино изображено на рисунке.

Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены
. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.

Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.







