Схема включения двигателя симистором
Многообразие материалов на эту тему практически не оставляет шансов на оригинальность, но кое-что можно представить, дабы сократить время на поиск нужных решений и обозначить «подводные камни». И прежде всего представить практическое, без академичности, которая векторными диаграммами управления и матрицами отпугивает многих, а привлекает только тех, кому нужен реферат потолще.
Необходимо отметить, что выбор индуктивной нагрузки, коей является двигатель, вовсе не отвергает данное решение для управления освещением или нагревательными элементами. Двигатель, достаточно капризный элемент и не всякий подходит для данной схемы. И более того, режим плавного управления мощностью двигателя не всегда удается осуществить. Это зависит от многих факторов: мощность двигателя, инерционность нагрузки на валу, реактивные и активные параметры обмоток. Для надёжного решения всех этих проблем предназначены частотные инверторы. Тем не менее, данная схема значительно проще по сложности, чем частотное управление и иногда обеспечивает приемлемые результаты.
Вот совокупность всех аспектов проблемы управления:
- Прежде всего, слово «микроконтроллер» в заглавии статьи, говорит о том, что управлять нагрузкой необходимо не потенциометром, (таких решений предостаточно), а именно микроконтроллером.
- Обязательное наличие гальванической развязки.
- Плавное управление мощностью, а не старт-стопное.
- Контроль перехода через ноль (Zero-Cross).
- Некоторые особенности выбора сглаживающего фильтра RC snubber.
- Программная реализация событий управления на примере Atmega16A.
- Обзор аналогичных решений в Интернете.
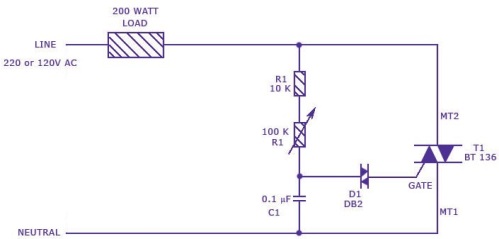
Схема 1. Узел управления нагрузкой.
Схема 2. Датчик перехода через ноль (Zero-Cross).
Цепи:
- VCC – 5 вольт, питание низковольтной части узла, полученное стабилизатором напряжения;
- GND – общая точка низковольтной части;
- DRV – выход микроконтроллера, для управления нагрузкой (PC6 для Atmega16A);
- ZERO — вход TTL-сигнала (PD2/INT0 для Atmega16A) от события перехода через ноль сети 220;
- L,N — фаза и нейтраль сети 220;
Элементы:
- MOC3052 — оптотриак (симистор), обеспечивающий гальваническую развязку;
- BT136 — триак (симистор), обеспечивающий управление мощной нагрузкой;
- BC847 – транзистор, управляющий MOC3052;
- R1,R2 – делитель, запирающий транзистор по умолчанию.
- RS,CS — сглаживающий фильтр RC snubber, необходимый только для индуктивной нагрузки.
- PC814 — оптрон датчика Zero-Cross;
- RZ0,RZ1 — токозадающие резисторы, двухваттные;
- SN74HC14D – триггер Шмидта, для повышения помехоустойчивости;
- М — двигатель, схема включения типа «звезда»;
- CF — фазосдвигающий конденсатор.
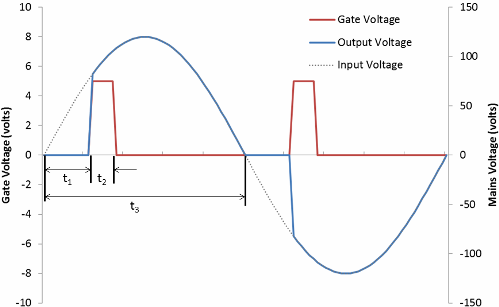
Диаграмма фазового управления.
Оптрон PC814 обладает той особенностью, что содержит два внутренних светодиода, и реагирует на разнополярное напряжение при токе 10 мА. Поэтому характер импульсов сигнала ZERO именно такой, как показано на диаграмме. На токозадающих сопротивлениях RZ0 и RZ1 падает практически всё напряжение питающей сети, поэтому на их ваттности не надо экономить. Вместо двух последовательных сопротивлений можно использовать одно, соответствующего типа.
Сигнал ZERO попадает на микроконтроллер PD2/INT0 и вызывает аппаратное прерывание ниспадающим фронтом. Как будет показано далее, программа обработки прерывания запускает счетчик, время работы которого и будет определять фазовую задержку включения симистора относительно события перехода через ноль. Сигнал DRV формируется этой задержкой. На диаграмме показано, что передний фронт сигнала DRV смещается так, что энергетика на нагрузке уменьшается синхронно, через каждые 10 миллисекунд. Этого можно достичь только программным способом.
Если задача управления нагрузкой простая (включить/выключить) , то датчик Zero-Cross можно и не применять. Однако его использование уменьшает помехи при коммутации сильноточной нагрузки, да и режим, в котором пребывает силовой симистор более щадящий и он меньше нагревается. Используя данный подход в полном объеме, можно строить достаточно сложные воздействия на двигатель.
В представленной схемотехнике имеется один не большой «подводный камушек», о который можно споткнуться. При инициализации микроконтроллера может пройти достаточное время, это связано с конкретной задачей, когда его выходные сигналы находятся в третьем состоянии. В течении этого времени необходимо запереть транзистор BC847. Иначе возможен скачек напряжения, который пройдет на нагрузку.
Сглаживающий фильтр RC-snubber.
Необходимо иметь в виду, что при отключении и включении симистора из-за реактивного сопротивления обмоток может возникать короткий бросок и даже затухающие колебания на нагрузке. Для предотвращения этих бросков служит фильтр RS, CS. В литературе по триакам приводятся номиналы этих элементов: RS = 39 Ом, CS = 0.01 мкФ. При этом для мощности RS нет рекомендаций. Мой практический опыт говорит о том, что сопротивление RS горит так, что выгорает весь узел с симистором. При этом оборудование испытывалось, собственные колебания подавлены, работа стабильная, но иногда у заказчика происходит пробой узла. Причины этих возгораний носят случайный характер и систематизации не поддаются. Можно только предположить, что причиной может быть не сам узел симистор – двигатель, а наводимая на него через питающую сеть импульсная помеха от другого оборудования.
И так, для подавления собственных колебаний представленные номиналы вполне оправданы, и вообще-то не критичны. RS должно быть того же порядка, что и активное сопротивления двух обмоток (схема «звезда»). Собственные колебания могут быть от 1 до 10кГц. На этой частоте реактивное сопротивление CS от 16кОм до 1.6кОм, поэтому всё напряжение приложено к CS. Гораздо хуже, когда возникает внешняя импульсная помеха, её параметры не известны.
Поэтому мои рекомендации таковы:
RS эквивалентно активному сопротивлению обмоток, а мощность не менее двух ватт. CS большего номинала чем 0.01 мкФ, с напряжением 400V и более.
Вот здесь есть интересные материалы на эту тему:
Программная реализация управления.
Пример программы реализован в проекте AVR-studio Ver 4.18 build 716.
- Частота процессора 8 МГц внутренняя без кварца.
- Регистр счетчика TCCR2 настроен на внутреннее прерывание с периодом 20 мкс.
- Программа обработки этого прерывания SIGNAL(SIG_OUTPUT_COMPARE2) вызывает процедуру drv_act().
- Процедура drv_act() в зависимости от флага drv_faza0 запускает счетчик задержки относительно момента перехода через ноль.
- Процедура обработки прерывания SIGNAL (SIG_INTERRUPT0) от датчика Zero-Cross управляет флагом drv_faza0.
- Весь период полуволны в 10 мс разбивается на 500 значений задержки.
- В массиве pwm_array[] заранее формируется набор задержек. Перебор индекса массива происходит в программе обработки прерывания SIGNAL (SIG_INTERRUPT0).
Более подробно см. проект.
Ниже будет описано, что можно получить, манипулируя полуволнами, но автор, работая над реальным проектом управления двигателем, не ограничился статическими значениями задержек. Для более стабильного результата была реализована следящая система поддержания заданных оборотов двигателя на основе тахометра. Программно это поддержано в процедуре NormalCtrl(), но описания этой части не входит в рамки данной статьи.
Управление двигателем с помощью манипуляций полуволнами.
- Двигатель: асинхронный , 3 фазы, 250 Ватт, 220 В, 2730 об/мин, тип АИР56В2N3.
- Фазосдвигающий конденсатор CF = 10мкФ х 400 В.
- Активное сопротивление каждой обмотки Ra = 39 Ом.
- RS = 46 Ом, CS = 0.22 мкФ.
- Двигатель не нагружен, холостой ход.
- Напряжения снимались через резистивный делитель относительно нейтрали N.
На диаграммах 1,2,3 зелёный график – напряжение на нагрузке (LOAD), жёлтый график – точка между сопротивлением RZ1 и PC814, она показывает реальные моменты перехода через ноль.
При определённой задержке фазы включения симистора, близкой к той, что показана на диаграмме 1, наблюдалась устойчивая работа двигателя на оборотах в два раза меньше максимальных. Однако незначительное уменьшение этой задержки, приводило к тому, что двигатель, постепенно разгоняясь, выходил на полные обороты и симистор открывался полностью, игнорируя управляющее воздействие.
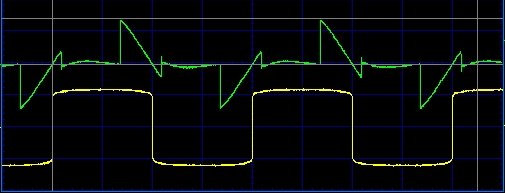
Диаграмма 1. Начало вращения, постепенный набор оборотов.
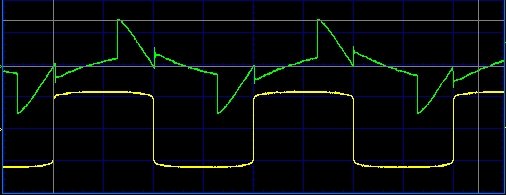
Диаграмма 2. Обороты, близкие к максимальным, вырождение участков закрытого симистора.
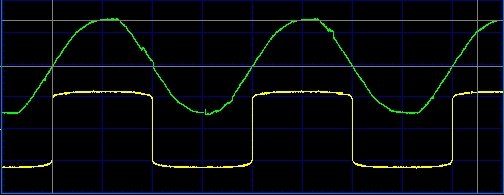
Диаграмма 2. Обороты максимальные, симистор открыт.
Можно предположить, что срыв работы симистора, как управляющего элемента, объясняется динамическим изменением реактивной составляющей сопротивления обмоток двигателя, в результате чего симистор переходит в открытое состояние. К этим сложностям добавляется то обстоятельство, что неустойчивость симистора так же зависит и от момента на валу двигателя. Если удалось подобрать фазы задержек на холостых оборотах, то при нагрузке для устойчивой работы эти параметры будут совершенно иными.
Однако же заставить работать двигатель на оборотах, кратных максимальным можно. Получить достаточно плавную регулировку, правда, не получится. Самое же проблематичное это получить вращение двигателя при оборотах в диапазоне 0.75MAX
Управление симистором: управление мощной нагрузкой на переменном токе
С целью коммутации нагрузок в цепях переменного тока удобно использовать симисторы, представляющие собой разновидность тиристора, однако отличающиеся от тиристора возможностью в открытом состоянии проводить ток обоих направлений.

Первые конструкции симисторов рассматривались уже в 1963 году, тогда например Мордовский научно-исследовательский электротехнический институт уже подал заявку на патент на симметричный тиристор (Патент SU 349356 A, Думаневич А.Н. и Евсеев Ю.А.), а General Electric занимались коммерческим внедрением того же изделия под названием «Triac» на западе.
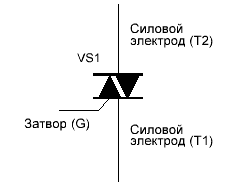
Тогда как у тиристора имеются четко определенные катод, анод и управляющий электрод, у симистора катод и анод в процессе его работы меняются местами, в зависимости от направления тока в текущий момент.
Безусловно, сигнал на управляющий электрод (затвор) симистора подается всегда относительно конкретного условного катода, но ток через открытый симистор может течь в любом направлении, и в этом смысле симистор в открытом состоянии можно рассматривать как два диода, включенные встречно-параллельно.
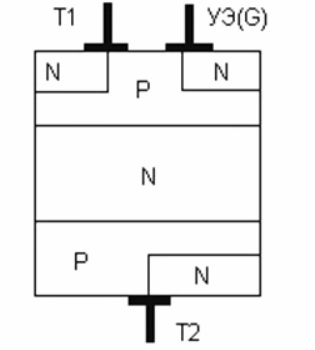
Симистор отличается пятислойной структурой полупроводника. Эквивалентно более точно его можно представить в виде двух триодных тиристоров, включённых встречно-параллельно, причем управляющий электрод, в отличие от тиристора, здесь только один.
Чтобы управлять мощной нагрузкой, симистор, подобно выключателю, включают в цепь нагрузки последовательно. И тогда: в закрытом состоянии симистор будет закрыт, нагрузка окажется обесточена, а при подаче отпирающего напряжения на управляющий электрод симистора, между основными электродами симистора появится проводимость — через нагрузку потечет ток. Причем ток может течь через открытый симистор в любом направлении, не то что у тиристора.
Для удержания симистора в открытом состоянии нет необходимости удерживать сигнал управления на управляющем электроде, достаточно подать сигнал, после чего ток установится и будет продолжать течь — в этом отличие симистора от транзистора. Когда же ток через симистор (через цепь нагрузки) станет ниже тока удержания (для переменного тока — в момент перехода тока через ноль), симистор закроется, и для его отпирания потребуется снова подать отпирающий сигнал на управляющий электрод.
Полярность управляющего напряжения, подаваемого на управляющий электрод симистора, может либо быть отрицательной, либо совпадать с полярностью напряжения, приложенного к условному аноду. По этой причине популярно такое управление, когда сигнал управления подается прямо с условного анода через ограничительную цепь и выключатель, — просто задается ток достаточный для отпирания симистора.
Из-за глубокой положительной обратной связи, например при индуктивной нагрузке, высокие скорости изменения напряжения или тока симистора могут привести к несвоевременному отпиранию симистора, и к большой мгновенной мощности, которая будет быстро рассеяна на кристалле, и окажется способна разрушить его. Для защиты от вредных выбросов, параллельно симистору в некоторых схемах ставят варистор, а для защиты от высоких значений dU/dt – применяют RC-снабберы.
Применение симистора вместо реле:
Симисторные регуляторы мощности для управления различными мощными нагрузками в цепях переменного тока очень популярны сегодня. Такие регуляторы для ламп называются диммерами, а регуляторы для разных инструментов, для коллекторных двигателей — просто симисторными регуляторами. Схемы их довольно компактны и просты, ведь на управляющий электрод симистора достаточно периодически подавать 0,7 вольт при токе порядка 10 мА, что легко реализуется при помощи RC-цепочки, а в более сложном виде — на базе ШИМ-контроллера, на том же 555 таймере.







