- Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя.
- Общее устройство (Inrunner, Outrunner)
- Магниты и полюса
- Обмотки и зубья
- Варианты распределения обмоток фаз по зубьям статора
- Обороты электрические и реальные
- Датчики положения
- Основные характеристики двигателя
- Звезда и Треугольник
- Бесколлекторный двигатель постоянного тока — принцип работы самого простого двухфазного типа
Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя.
Общее устройство (Inrunner, Outrunner)
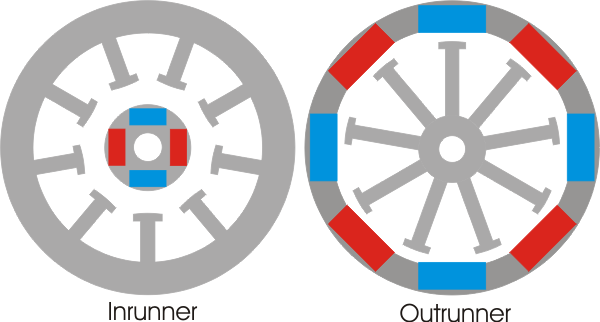
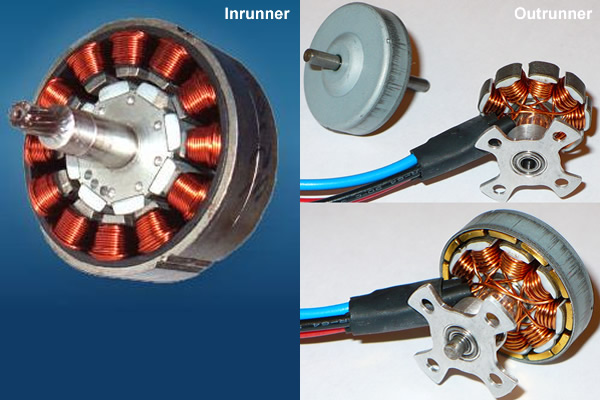
Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора. В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую ось.

Магниты и полюса
Количество магнитов не всегда соответствует количеству полюсов. Несколько магнитов могут формировать один полюс:
В этом случае 8 магнитов формируют 4 полюса. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Магниты на роторе закрепляются с помощью специального клея. Реже встречаются конструкции с держателем магнитов. Материал ротора может быть магнитопроводящим (стальным), немагнитопроводящим (алюминиевые сплавы, пластики и т.п.), комбинированным.
Обмотки и зубья

Количество зубьев статора должно делиться на количество фаз. т.е. для трехфазного бесколлекторного двигателя количество зубьев статора должно делиться на 3. Количество зубьев статора может быть как больше так и меньше количества полюсов на роторе. Например существуют моторы со схемами: 9 зубьев/12 магнитов; 51 зуб/46 магнитов.
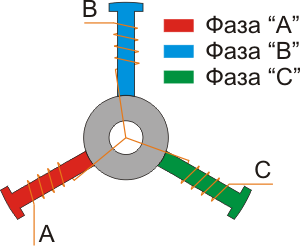
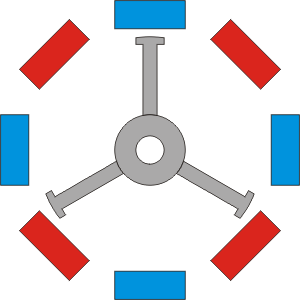
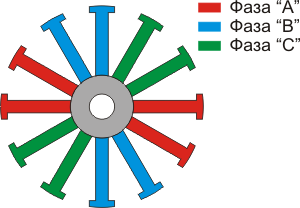
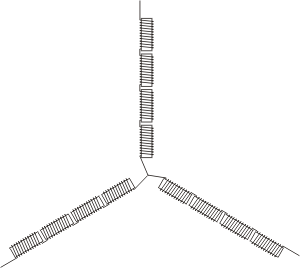
Двигателя с 3-х зубым статором применяют крайне редко. Поскольку в каждый момент времени работает только две фазы (при включении звездой), магнитные силы воздействуют на ротор не равномерно по всей окружности (см. рис.).
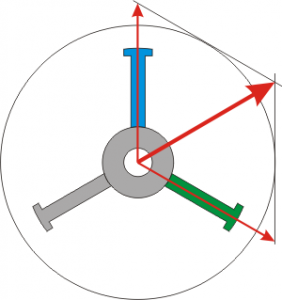
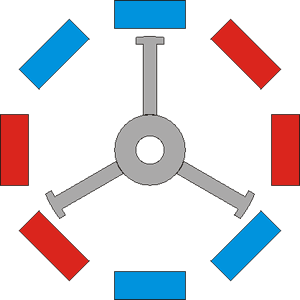
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее.
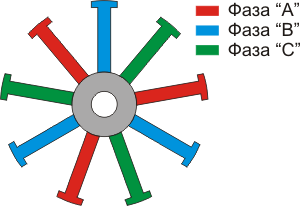
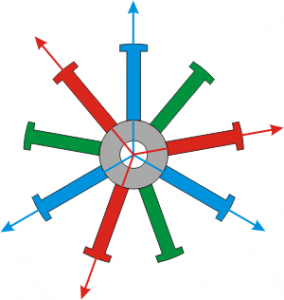
В этом случае магнитные силы, воздействующие на ротор, компенсируют друг друга. Дисбаланса не возникает.
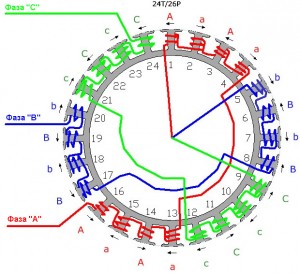
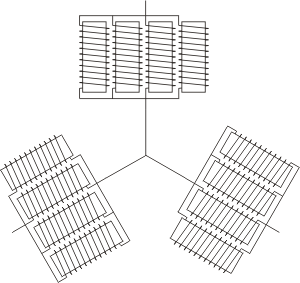
Варианты распределения обмоток фаз по зубьям статора
Вариант обмотки на 9 зубов
 Вариант обмотки на 12 зубов
Вариант обмотки на 12 зубов
В приведенных схемах число зубов выбрано таким образом, чтобы оно делилось не только на 3. Например, при 36 зубьях приходится 12 зубьев на одну фазу. 12 зубьев можно распределить так:
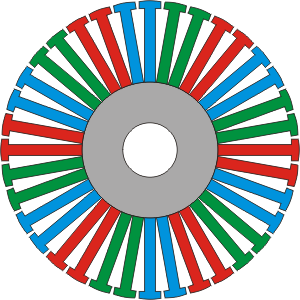 6 групп по 2 зуба
6 групп по 2 зуба
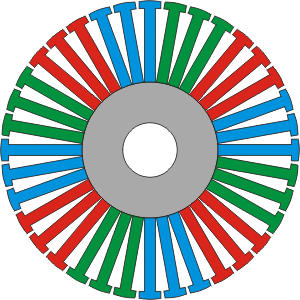 4 группы по 3 зуба
4 группы по 3 зуба
 3 группы по 4 зуба
3 группы по 4 зуба
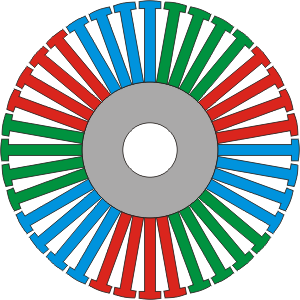
 2 группы по 6 зубьев
2 группы по 6 зубьев
Наиболее предпочтительна схема 6 групп по 2 зуба.
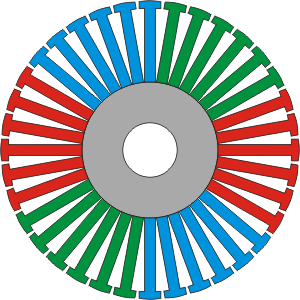
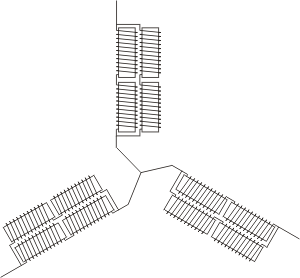
Существует двигатель с 51 зубом на статоре! 17 зубов на одну фазу. 17 — это простое число, оно нацело делится только на 1 и на само себя. Как же распределить обмотку по зубьям? Увы, но я не смог найти в литературе примеров и методик, которые помогли бы решить эту задачу. Оказалось, что обмотка распределялась следующим образом:
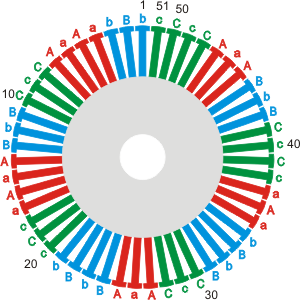
Рассмотрим реальную схему обмотки.
Обратите внимание, что обмотка имеет разные направления намотки на разных зубьях. Разные направления намотки обозначаются прописными и заглавными буквами. Детально о проектировании обмоток можно прочитать в литературе, предложенной в конце статьи.
Классическая обмотка выполняется одним проводом для одной фазы. Т.е. все обмотки на зубьях одной фазы соединены последовательно.
Обмотки зубьев могут соединяться и параллельно.
Так же могут быть комбинированные включения
Параллельное и комбинированное включение позволяет уменьшить индуктивность обмотки, что приводит к увеличению тока статора (следовательно и мощности) и скорости вращения двигателя.
Обороты электрические и реальные
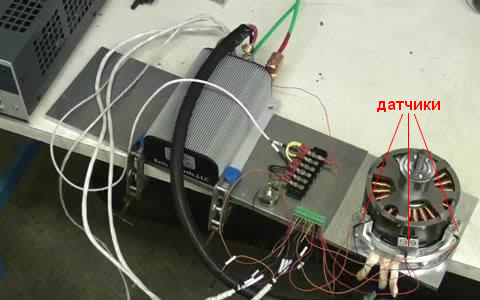
Датчики положения
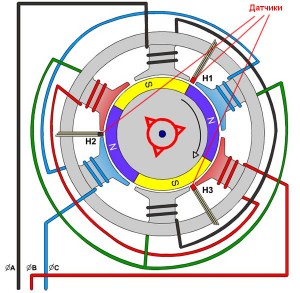
Имеется в виду «электрических» градусов. Т.е. для многополюсного двигателя физическое расположение датчиков может быть таким:

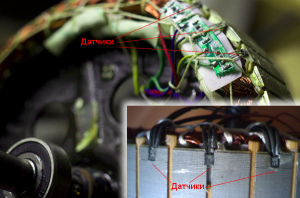
Иногда датчики располагают снаружи двигателя. Вот один из примеров расположения датчиков. На самом деле это был двигатель без датчиков. Таким простым способом его оснастили датчиками холла.
На некоторых двигателях датчики устанавливают на специальном устройстве, которое позволяет перемещать датчики в определенных пределах. С помощью такого устройства устанавливается угол опережения (timing). Однако, если двигатель требует реверса (вращения в обратную сторону) потребуется второй комплект датчиков, настроенных на обратный ход. Поскольку timing не имеет решающего значения при старте и низких оборотах, можно установить датчики в нулевую точку, а угол опережения корректировать программно, когда двигатель начнет вращаться.
Основные характеристики двигателя
Звезда и Треугольник
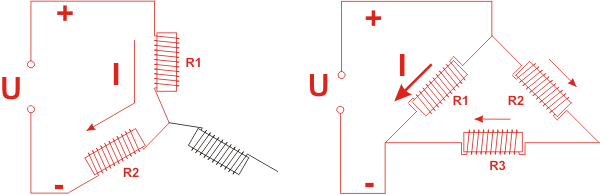
При включении звездой ток протекает через две обмотки. Результирующее сопротивление равно сумме сопротивлений двух обмоток R=R1+R2. Соответственно максимально возможный ток, протекаемый через обмотки I=U/(R1+R2). Потребляемая мощность P=U*I Предположим, что напряжение 10 В, а сопротивление обмотки 1 ОМ. Тогда ток I=10/(1+1)=5А. Потребляемая мощность P=10*5=50 Вт.
При включении треугольником ток протекает через все обмотки. Результирующее сопротивление обмоток R=(R1*(R2+R3))/(R1+R2+R3). Соответственно, максимально возможный ток, протекаемый через обмотки I=U/((R1*(R2+R3))/(R1+R2+R3)
При таком же напряжении и сопротивлении обмоток получаем ток I=10/((1*(1+1))/(1+1+1))=15А. Потребляемая мощность P=10*15=150 Вт.
При включении треугольником вырастают и обороты двигателя. Обмотки двигателя соединенные треугольником греются больше, чем при включении звездой.
Очевидно, что простым переключением обмотки с звезды в треугольник можно получить двигатель с совершенно другими характеристиками.
В высокомоментных двигателях с длительным режимом включения целесообразно применять звезду. В двигателях, работающих в кратковременном режиме, требующих более высоких оборотов, целесообразно применять треугольник.
Иногда в электротранспорте старт и разгон выполняется при включении обмоток звездой (так как это включение обеспечивает высокий момент на валу, но меньшие обороты), после разгона выполняется переключение в треугольник (обороты выше, момент меньше). Это позволяет увеличить диапазон оборотов двигателя, сохранив стартовые характеристики.
В следующей статье будет рассмотрен алгоритм управления бесколлекторными двигателями.
Бесколлекторный двигатель постоянного тока — принцип работы самого простого двухфазного типа
Коллекторные двигатели постоянного тока широко распространены в различных технических областях. Например, практически все ручные электроинструменты низкого и среднего ценового диапазона имеют коллекторные двигатели. Однако, основной недостаток таких двигателей заключается именно в наличии коллектора. Потому как на коллекторе происходят основные потери мощности электродвигателя. Но эти потери искупаются дешевизной изготовления коллекторно-щеточного узла.
Но ради увеличения КПД электродвигателя можно пойти и на удорожание его конструкции. В этом случае применяют бесколлекторные двигатели постоянного тока. Иногда такие электродвигатели называют бесконтактными двигателями. Отсутствие трущихся щёток позволяет повысить мощность и продлить срок службы двигателя.
Разумеется, щеточно-коллекторный узел у таких двигателей отсутствует. Например, он может заменяться полупроводниковым коммутатором-переключателем. Такой коммутатор управляется с помощью специальных сигналов. Сигналы поступают с бесконтактного датчика положения ротора. Чаще всего в качестве датчика положения ротора применяют датчики Холла .
Основой датчика Холла является тонкая пластинка проводника или полупроводника. На четырех гранях этой пластинки находятся контактные площадки с выводами. На два противоположных вывода подается питание. С двух других выводов снимается выходной сигнал. Сигнал появляется в том случае, если на пластину действует магнитное поле. Причем направление индукции этого поля должно быть перпендикулярно плоскости пластины.
Здесь рассматривается наиболее простой вариант бесконтактного двигателя постоянного тока. У данного двигателя ротор является постоянным магнитом. На статоре электродвигателя располагаются четыре обмотки.
В бесколлекторном двигателе, в отличии от коллекторного, якорем является статор . У бесколлекторных двигателей статор-якорь может иметь как внешнее, так и внутреннее устройство. Примером бесколлекторного электродвигателя с внутренним статором может служить мотор-колесо для электрических велосипедов и самокатов. Однако, двухфазный электродвигатель постоянного тока может быть только с внешним статором. У двигателей с внутренним статором количество фаз должно быть не менее трех.
Для работы бесколлекторного двигателя необходимо, чтобы постоянное магнитное поле ротора увлекалось за вращающемся электромагнитным полем статора. То есть, происходят практически те же процессы, что и в коллекторном двигателе постоянного тока. Только достигаются они другими средствами. В процессе работы двигателя по двум противоположным обмоткам поочерёдно протекает электрический ток. При этом эти обмотки становятся двумя разными полюсами электромагнита. Датчики Холла устанавливаются в пазах обмоток двух смежных полюсов. Иначе говоря, датчики устанавливают со смещением по окружности статора на 90% относительно друг друга.
Магнитное поле ротора действует на один из датчиков Холла. То есть, на тот, который в данный момент расположен перпендикулярно этому магнитному полю. На контактах датчика появляется напряжение. То есть, с этого датчика поступает сигнал на открытие соответствующих транзисторов. Транзисторы открываются и благодаря этому по двум противоположным обмоткам начинает течь электрический ток. Две противоположные обмотки статора становится электромагнитами с разными полюсами. Каждый из полюсов статора притягивает противоположный полюс ротора. Ротор поворачивается и своим магнитным полем действует на следующий датчик Холла.
Датчик посылает сигнал на транзисторы. Транзисторы открываются и по двум следующим противоположным обмоткам статора начинает течь электрический ток. Обмотки становится электромагнитами. И каждым из своих полюсов притягивают противоположный полюс ротора. Ротор поворачивается и действует на другой датчик Холла. Все эти действия повторяются вновь и вновь. То есть, до тех пор пока на двигатель подается питание ротор вращается. Для изменения направления вращения электродвигателя изменяют полярность питания датчиков Холла.
Данный двигатель постоянного тока имеет два основных положения в процессе своего движения. То есть, изменение его вращения имеют две фазы. Потому подобный электродвигатель постоянного тока называется двухфазным. Разумеется, что он имеет устройство и принцип работы отличные от двухфазного двигателя переменного тока .
Вместо датчиков Холла в таких двигателях могут использоваться и другие виды датчиков. Например, оптические датчики. А также существуют бесколлекторные двигатели, которые и вовсе не имеют датчиков. В таких двигателях положение ротора определяется путем измерения напряжения на незадействованной в данный момент времени обмотке. Обычно двигатели без датчиков применяются, если старт происходит без нагрузки на валу.
Количество фаз бесконтактного электродвигателя может быть больше, чем две. Чем больше фаз, тем более плавнее вращается ротор. Но, с другой стороны, у таких двигателей более сложная система управления. К примеру, трехфазные двигатели постоянного тока получили наиболее широкое распространение. Потому как такая система наиболее оптимальна по соотношению сложности к эффективности. Бесколлекторные двигатели с двухполюсным ротором имеют наибольшую скорость вращения при наименьшем крутящем моменте. Электродвигатели постоянного тока с большим количеством полюсов имеют меньшую скорость вращения. Но зато у них больший крутящий момент.
Для вашего удобства подборка публикаций
Спасибо за посещение канала, чтение заметки, упоминание в социальных сетях и других интернет — ресурсах, а также подписку, лайки, дизлайки и комментарии ( Лайки и дизлайки можно ставить не регистрируясь и не заходя в аккаунт )







