Схемы автоматического управления пуском и торможением двигателей постоянного тока
 Пуск любого двигателя сопровождается определенными переключениями в силовой цепи и цепи управления. При этом используются релейно-контакторные и бесконтактные аппараты. Для двигателей постоянного тока в целях ограничения пусковых токов в цепи роторов и якорей двигателей включаются пусковые резисторы, которые при разгоне двигателей по ступеням выключаются. Когда пуск закончится, пусковые резисторы полностью шунтируются.
Пуск любого двигателя сопровождается определенными переключениями в силовой цепи и цепи управления. При этом используются релейно-контакторные и бесконтактные аппараты. Для двигателей постоянного тока в целях ограничения пусковых токов в цепи роторов и якорей двигателей включаются пусковые резисторы, которые при разгоне двигателей по ступеням выключаются. Когда пуск закончится, пусковые резисторы полностью шунтируются.
Процесс торможения двигателей также может быть автоматизирован. После команды на торможение с помощью релейно-контакторной аппаратуры осуществляются необходимые переключения в силовых цепях. При подходе к скорости, близкой к нулю, двигатель отключается от сети. В процессе пуска выключение ступеней происходит через определенные интервалы времени либо в зависимости от других параметров. При этом изменяются ток и скорость двигателя.
Управление пуском двигателя осуществляется в функции ЭДС (или скорости), тока, времени и пути.
Типовые узлы и схемы автоматического управления пуском двигателей постоянного тока
Пуск двигателя постоянного тока параллельного или независимого возбуждения осуществляется с резистором, введенным в цепь якоря. Резистор необходим для ограничения пускового тока. По мере разгона двигателя пусковой резистор по ступеням выводится. Когда пуск закончится, резистор будет полностью зашунтирован, и двигатель перейдет работать на естественную механическую характеристику (рис. 1). При пуске двигатель разгоняется по искусственной характеристике 1, затем 2, а после шунтирования резистора — по естественной характеристике 3.
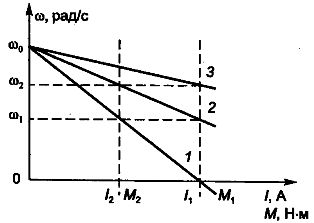
Рис. 1. Механические и электромеханические характеристики двигателя постоянного тока параллельного возбуждения (ω — угловая скорость вращения; I1 М1 — пиковый ток и момент двигателя; I2 М2 — ток и момент переключения)
Рассмотрим узел схемы пуска двигателя постоянного тока (ДПТ) в функции ЭДС (рис. 2).
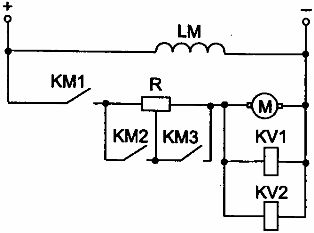
Рис. 2. Узел схемы пуска ДПТ параллельного возбуждения в функции ЭДС
Управление в функции ЭДС (или скорости) осуществляется реле, напряжения и контакторами. Реле напряжения настроены на срабатывание при различных значениях ЭДС якоря. При включении контактора КМ1 напряжение на реле KV в момент пуска недостаточно для срабатывания. По мере разгона двигателя (вследствие роста ЭДС двигателя) срабатывает реле KV1, затем KV2 (напряжения срабатывания реле имеют соответствующие значения); они включают контакторы ускорения КМ2, КМЗ, и резисторы в цепи якоря шунтируются (цепи включения контакторов на схеме не показаны; LM — обмотка возбуждения).
Рассмотрим схему пуска двигателя постоянного тока в функции ЭДС (рис. 3). Угловая скорость двигателя часто фиксируется косвенным путем, т.е. измерением величин, связанных со скоростью. Для двигателя постоянного тока такой величиной является ЭДС. Пуск осуществляется следующим образом. Включается автоматический выключатель QF, обмотка возбуждения двигателя подключается к источнику питания. Срабатывает реле КА и замыкает свой контакт.
Остальные аппараты схемы остаются в исходном положении. Для пуска двигателя необходимо нажать кнопку SB1 «Пуск», после чего контактор КМ1 срабатывает и подключает двигатель к источнику питания. Контактор КМ1 становится на самопитание. Двигатель постоянного тока разгоняется с резистором R цепи якоря двигателя.
По мере увеличения скорости двигателя растет его ЭДС и напряжение на катушках реле KV1 и KV2. При скорости ω1 (см. рис. 1.) срабатывает реле KV1. Оно замыкает свой контакт в цепи контактора КМ2, который срабатывает и закорачивает своим контактом первую ступень пускового резистора. При скорости ω2 срабатывает реле KV2. Своим контактом оно замыкает цепь питания контактора КМЗ, который, срабатывая, контактом закорачивает вторую пусковую ступень пускового резистора. Двигатель выходит на естественную механическую характеристику и заканчивает разбег.
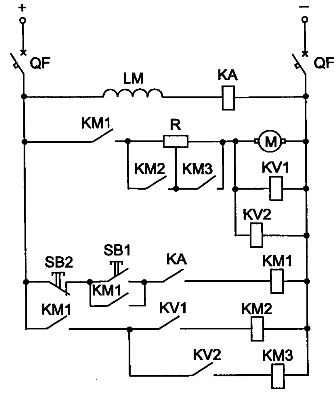
Рис. 3. Схема пуска ДПТ параллельного возбуждения в функции ЭДС
Для правильной работы схемы необходимо настроить реле напряжения KV1 на срабатывание при ЭДС, соответствующей скорости ω1, и реле KV2 на срабатывание при скорости ω2.
Для остановки двигателя следует нажать кнопку SB2 «Стоп». Для обесточивания схемы нужно отключить автоматический выключатель QF.
Управление в функции тока осуществляется с помощью реле тока. Рассмотрим узел схемы пуска двигателя постоянного тока в функции тока. В схеме, приведенной на рис. 4, применяются реле максимального тока, которые срабатывают при пусковом токе I1 и отпадают при минимальном токе I2 (см. рис. 1). Собственное время срабатывания токовых реле должно быть меньше собственного времени срабатывания контактора.
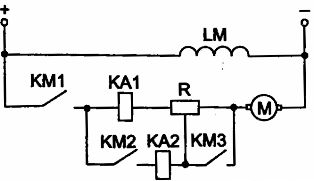
Рис. 4. Узел схемы пуска ДПТ параллельного возбуждения в функции тока
Разгон двигателя начинается при резисторе, полностью введенном в цепь якоря. По мере разгона двигателя ток уменьшается, при токе I2 реле КА1 отпадает и своим контактом замыкает цепь питания контактора КМ2, который своим контактом шунтирует первую пусковую ступень резистора. Аналогично осуществляется закорачивание второй пусковой ступени резистора (реле КА2, контактор КМЗ). Цепи питания контакторов на схеме не показаны. По окончании пуска двигателя резистор в цепи якоря будет зашунтирован.
Рассмотрим схему пуска двигателя постоянного тока в функции тока (рис. 5). Сопротивления ступеней резистора выбираются таким образом, чтобы в момент включения двигателя и шунтирования ступеней ток I1 в цепи якоря и момент М1 не превосходили допустимого уровня.
Пуск двигателя постоянного тока осуществляется включением автоматического выключателя QF и нажатием кнопки SB1 «Пуск». При этом срабатывает контактор КМ1 и замыкает свои контакты. По силовой цепи двигателя проходит пусковой ток I1, под действием которого срабатывает реле максимального тока КА1. Его контакт размыкается, и контактор КМ2 не получает питания.
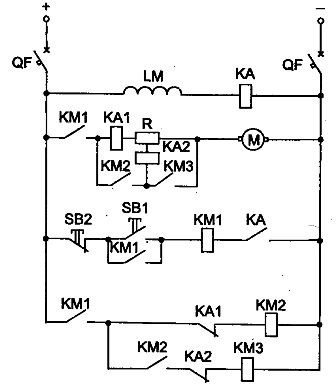
Рис. 5. Схема пуска ДПТ параллельного возбуждения в функции тока
Когда ток уменьшается до минимального значения I2, реле максимального тока КА1 отпадает и замыкает свой контакт. Срабатывает контактор КМ2 и своим главным контактом шунтирует первую секцию пускового резистора и реле КА1. При переключении ток возрастает до значения I1.
При повторном увеличении тока до значения I1 контактор КМ1 не включается, поскольку его катушка зашунтирована контактом КМ2. Под действием тока I1 реле КА2 срабатывает и размыкает свой контакт. Когда в процессе ускорения ток вновь уменьшается до значения I2, реле КА2 отпадает и включается контактор КМЗ. Пуск заканчивается, двигатель работает на естественной механической характеристике.
Для правильной работы схемы необходимо, чтобы время срабатывания реле КА1 и КА2 было меньше времени срабатывания контакторов. Чтобы остановить двигатель, необходимо нажать кнопку SB2 «Стоп» и выключить автоматический выключатель QF для обесточивания схемы.
Управление в функции времени осуществляется с помощью реле времени и соответствующих контакторов, которые своими контактами закорачивают ступени резистора.
Рассмотрим узел схемы пуска двигателя постоянного тока в функции времени (рис. 6). Реле времени КТ срабатывает сразу при появлении напряжения в схеме управления через размыкающий контакт КМ1. После размыкания контакта КМ1 реле времени КТ теряет питание и с выдержкой времени замыкает свой контакт. Контактор КМ2 через промежуток времени, равный выдержке реле времени, получает питание, замыкает свой контакт и шунтирует сопротивление в цепи якоря.
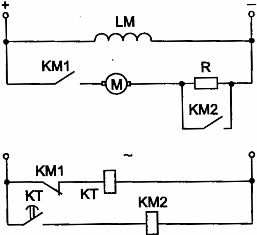
Рис. 6. Узел схемы пуска ДПТ параллельного возбуждения в функции времени
К достоинствам управления в функции времени относятся простота управления, стабильность процесса разгона и торможения, отсутствие задержки электропривода на промежуточных скоростях.
Рассмотрим схему пуска двигателя постоянного тока параллельного возбуждения в функции времени. На рис. 7 приведена схема нереверсивного пуска двигателя постоянного тока параллельного возбуждения. Пуск происходит в две ступени. В схеме используются кнопки SB1 «Пуск» и SB2 «Стоп», контакторы КМ1. КМЗ, электромагнитные реле времени КТ1, КТ2. Включается автоматический выключатель QF. При этом катушка реле времени КТ1 получает питание и размыкает свой контакт в цепи контактора КМ2, Пуск двигателя осуществляется нажатием кнопки SB1 «Пуск». Контактор КМ1 получает питание и своим главным контактом подключает двигатель к источнику питания с резистором в цепи якоря.
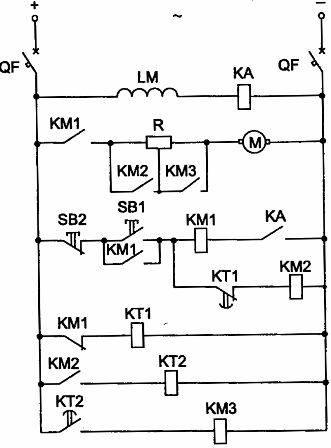
Рис. 7. Схема нереверсивного пуска ДПТ в функции времени
Реле минимального тока КА служит для защиты двигателя от обрыва цепи возбуждения. При нормальной работе реле КА срабатывает и его контакт в цепи контактора КМ1 замыкается, подготавливая контактор КМ1 к работе. При обрыве цепи возбуждения реле КА обесточивается, размыкает свой контакт, затем обесточивается контактор КМ1 и двигатель останавливается. При срабатывании контактора КМ1 замыкается его блокировочный контакт и размыкается контакт КМ1 в цепи реле КТ1, которое обесточивается и замыкает свой контакт с выдержкой времени.
Через промежуток времени, равный выдержке времени реле КТ1, замыкается цепь питания контактора ускорения КМ2, который срабатывает и своим главным контактом закорачивает одну ступень пускового резистора. Одновременно получает питание реле времени КТ2. Двигатель разгоняется. Через промежуток времени, равный выдержке времени реле КТ2, контакт КТ2 замыкается, контактор ускорения КМЗ срабатывает и своим главным контактом закорачивает вторую ступень пускового резистора в цепи якоря. Пуск заканчивается, и двигатель переходит работать на естественную механическую характеристику.
Типовые узлы схем управления торможением двигателей постоянного тока
В системах автоматического управления двигателем постоянного тока применяется динамическое торможение, торможение противовключением и рекуперативное торможение.
При динамическом торможении необходимо обмотку якоря двигателя замкнуть на добавочное сопротивление, а обмотку возбуждения оставить под напряжением. Такое торможение можно осуществить в функции скорости и в функции времени.
Управление в функции скорости (ЭДС) при динамическом торможении можно выполнить по схеме, приведенной на рис. 8. При отключении контактора КМ1 якорь двигателя отключается от сети, но на его зажимах в момент отключения имеется напряжение. Реле напряжения KV срабатывает и замыкает свой контакт в цепи контактора КМ2, который своим контактом замыкает якорь двигателя на резистор R.
При скорости, близкой к нулю, реле KV теряет питание. Дальнейшее торможение от минимальной скорости до полной остановки происходит под действием статического момента сопротивления. Для увеличения эффективности торможения можно применить две или три ступени торможения.
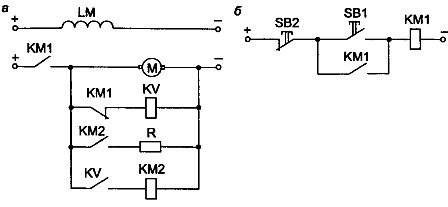
Рис. 8. Узел схемы автоматического управления динамическим торможением в функции ЭДС: а — силовая цепь; б — цепь управления
Динамическое торможение двигателя постоянного тока независимого возбуждения в функции времени осуществляется по схеме, приведенной на рис. 9.
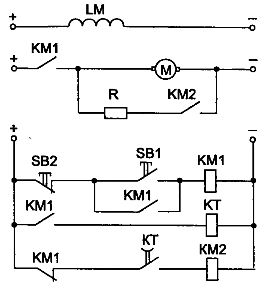
Рис. 9. Узел схемы динамического торможения ДПТ независимого возбуждения в функции времени
При работе двигателя реле времени КТ включено, но цепь контактора торможения КМ2 разомкнута. Для торможения необходимо нажать кнопку SB2 «Стоп». Контактор КМ1 и реле времени КТ теряют питание; срабатывает контактор КМ2, так как контакт КМ1 в цепи контактора КМ2 замыкается, а контакт реле времени КТ размыкается с выдержкой времени.
На время выдержки реле времени контактор КМ2 получает питание, замыкает свой контакт и подключает якорь двигателя к добавочному резистору R. Осуществляется динамическое торможение двигателя. В конце его реле КТ после выдержки времени размыкает свой контакт и отключает контактор КМ2 от сети. Дальнейшее торможение до полной остановки осуществляется под действием момента сопротивления Мс.
При торможении противовключением ЭДС двигателя и напряжение сети действуют согласно. Для ограничения тока в силовую цепь вводится резистор.
Управление возбуждением электродвигателей постоянного тока
Обмотка возбуждения двигателя обладает значительной индуктивностью, и при быстром отключении двигателя на ней может возникнуть большое напряжение, что приведет к пробою изоляции обмотки. Для предотвращения этого можно использовать узлы схем, приведенные на рис. 10. Сопротивление гашения включается параллельно обмотке возбуждения через диод (рис. 10 ,б). Следовательно, после отключения ток через сопротивление проходит кратковременно (рис. 10, а).

Рис. 10. Узлы схем включения сопротивлений гашения: а — сопротивление гашения включается параллельно; б — сопротивление гашения включается через диод.
Защита от обрыва цепи возбуждения осуществляется с помощью реле минимального тока по схеме, показанной на рис. 11.

Рис. 11. Защита от обрыва цепи возбуждения: а — силовая цепь возбуждения; б— цепь управления
При обрыве обмотки возбуждения реле КА теряет питание и отключает цепь контактора КМ.
Схемы торможения двигателей постоянного тока
 При остановке и реверсировании двигателей постоянного тока (ДПТ) применяется электрическое (динамическое и противовключением) и механическое торможения. При динамическом торможении схема отключает обмотку якоря от сети и замыкает ее на тормозной резистор с одной или несколькими ступенями. Управление динамическим торможением производится с заданием времени или с контролем скорости.
При остановке и реверсировании двигателей постоянного тока (ДПТ) применяется электрическое (динамическое и противовключением) и механическое торможения. При динамическом торможении схема отключает обмотку якоря от сети и замыкает ее на тормозной резистор с одной или несколькими ступенями. Управление динамическим торможением производится с заданием времени или с контролем скорости.
Для управления моментом ДПТ с заданием времени в режиме динамического торможения применяется узел схемы, приведенный на рис. 1, а, составленный для управления торможением ДПТ с независимым возбуждением с одной ступенью тормозного резистора R2.
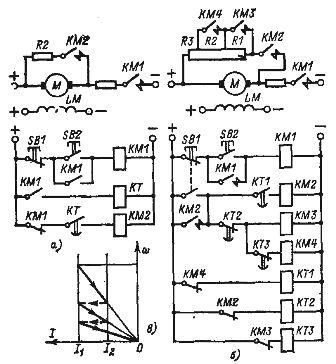
Рис. 1. Схема, осуществляющая одноступенчатое (а) и трехступенчатое (б) динамическое торможение двигателя постоянного тока с управлением по времени и пусковая диаграмма трехступенчатого торможения (в).
Команда на перевод ДПТ в режим динамического торможения в приведенной схеме подается от кнопки SB1. При этом линейный контактор КМ1 отключает якорь двигателя от напряжения сети, а тормозной контактор КМ2 подключает к нему тормозной резистор. Команду на отсчет времени процесса динамического торможения для реле торможения КТ подает линейный контакторам КМ1, выполняющий предыдущую операцию в схеме перед началом динамического торможения. В качестве тормозного реле используется электромагнитное реле времени постоянного тока.
Схема может применяться для управления ДПТ с независимым возбуждением и ДПТ с последовательным возбуждением, но в последнем случае — с реверсом тока в последовательной обмотке возбуждения.
Управление динамическим торможением с заданием времени чаще используется при многоступенчатом торможении, когда применяется несколько реле времени, подающих команды на последовательное выведение ступеней тормозного резистора (как при пуске). Узел такой схемы, составленный для ДПТ с независимым возбуждением с тремя ступенями тормозного резистора, приведен на рис. 1, б.
Последовательное включение ступеней торможения осуществляют контакторы КМ2, КМ3, КМ4, управляемые от электромагнитных реле времени КТ1, КТ2 и КТ3. Управляющая команда на начало торможения в схеме подается кнопкой SB1, которая отключает контактор КМ1 и включает КМ2.
Дальнейшая последовательность включения контакторов КМ3, КМ4 и отключения КМ2 в конце процесса торможения определяется настройкой реле торможения КТ2, КТ3 и КТ1, обеспечивающих переключения при значениях тока I1 и I2, как показано на рис. 1, в. Приведенная схема управления может применяться и для управления двигателем переменного тока в режиме динамического торможения.
При одноступенчатом динамическом торможении наибольшее распространение получило управление моментом с контролем скорости. Узел такой схемы приведен на рис. 2. Контроль скорости осуществляет реле напряжения KV, обмотка которого подключена на якорь ДПТ.
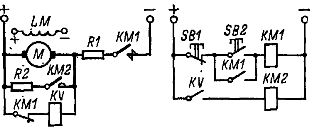
Рис. 2. Схема управления динамическим торможением двигателя постоянного тока с контролем скорости.
Это реле, отключающееся при низкой скорости, подает команду на отключение контактора КМ2 и окончание процесса торможения. Напряжение отпадания реле KV соответствует скорости, составляющей примерно 10—20 % установившегося начального значения:

Практически реле KV настраивается так, чтобы контактор торможения отключался при скорости, близкой к нулю. Так как реле торможения должно отключаться при низких значениях напряжения, то в качестве него выбирается реле напряжения с низким коэффициентом возврата типа РЭВ830.
При торможении двигателей в режиме противовключения, которое чаще всего используется в реверсивных схемах, применение управления с контролем скорости оказывается наиболее простым и надежным.
Узел управления ДПТ СВ в режиме торможения противовключением с одной ступенью тормозного резистора приведен на рис. 3. Тормозной резистор состоит из условно принятой пусковой ступени R2 и ступени противовключения R1. Управляющая команда на реверс с предварительным торможением противовключением в приведенной схеме подается от командоконтроллера SM.
Управление режимом торможения и выдача команды на его окончание производят реле противовключейния KV1 и KV2, в качестве которых используются реле напряжения типа РЭВ821 или РЭВ84. Реле настраиваются на напряжение втягивания из расчета включения его при скорости двигателя, близкой к нулю (15—20 % установившейся скорости):

где Uс — напряжение питающей сети, Rx — часть сопротивления, на которую подключается обмотка реле противовключения (KV1 или KV2), R — полное сопротивление якорной цепи.

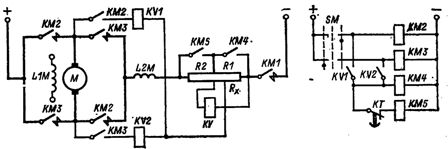
Рис. 4. Узел схемы управлении торможением противовключением двигателя постоянного тока с контролем скорости.
Точка присоединения обмоток реле к пусковому и тормозному резистору, т. е. значение Rx, находится из условия отсутствия напряжения на реле в начале торможения, когда
где ωнач — угловая скорость двигателя в начале торможения.
Отключенное состояние замыкающего контакта реле противовключения в процессе всего периода торможения обеспечивает наличие в якорной цепи ДПТ полного тормозного сопротивления, определяющего допустимый тормозной ток. В конце торможения реле KV1 или KV2, включаясь, подает команду на включение контактора противовключения КМ4 и разрешает начало реверсирования после окончания торможения.
При пуске двигателя реле KV1 или KV2 включается сразу после подачи управляющей команды на пуск двигателя. При этом включается контактор КМ4 и отключает ступень противовключения R1, обмотка реле ускорения КТ шунтируется. По истечении выдержки времени реле КТ замыкается его контакт в цепи катушки контактора КМ5, который, срабатывая, замыкает свой силовой контакт, шунтирующий часть пускового резистора R2, двигатель переходит на естественную характеристику.
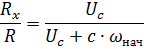
При остановке двигателя, особенно в механизмах перемещения и подъема, применяется механическое торможение, осуществляемое колодочным электромагнитным или другим тормозом. Схема включения тормоза приведена на рис. 4. Управление тормозом обеспечивает электромагнит YB, при включении которого тормоз растормаживает двигатель, а при отключении — затормаживает. Для включения электромагнита его обмотка, имеющая обычно большую индуктивность, подключается к напряжению питания контактором с дугогашением, например КМ5.
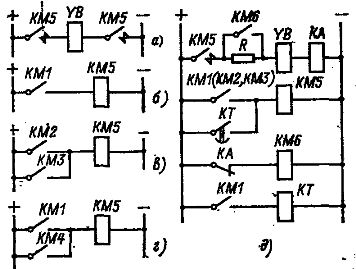
Рис. 4. Узлы схем включения электромагнитного тормоза постоянного тока.
Включается и отключается этот контактор вспомогательными контактами линейного контактора КМ1 (рис. 4, б) или контактором реверса КМ2 и КМЗ (рис. 4, в) в реверсивных схемах. Обычно механическое торможение осуществляется вместе с электрическим, но тормоз может срабатывать, например, после окончания динамического торможения или с выдержкой времени. При этом питание обмотки электромагнита УВ в период динамического торможения осуществляется контактором торможения КМ4 (рис. 4, г).
Часто электромагниты тормозов включаются с форсировкой, осуществляемой дополнительным контактором КМ6 (рис. 4,д). Отключается этот контактор токовым реле КА, которое включается при включении электромагнита тормоза YB. Настраивается реле КА на срабатывание при токе, равном номинальному току холодной обмотки электромагнита тормоза YB при ПВ = 25 %. Реле времени КТ используется для обеспечения наложения механического тормоза при остановке двигателя.
При торможении ДПТ со скорости выше основной, соответствующей ослабленному магнитному потоку, управление моментом при усилении магнитного потока осуществляется с контролем тока. Контроль тока обеспечивает токовое реле КА, осуществляющее релейную обратную связь по току якоря, как это осуществлялось при ослаблении магнитного потока. При динамическом торможении используется узел схемы, приведенный на рис. 5, а, а при торможении противовключением — узел, приведенный на рис. 5, б.
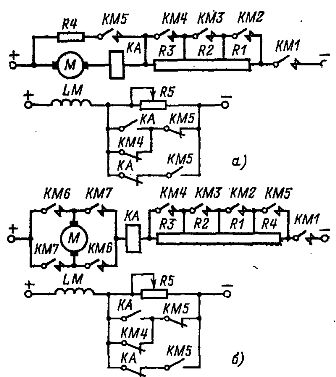
Рис. 5. Узлы схем динамического торможения (а) и противовключения (б) с усилением магнитного потока двигателя постоянного тока с управлением с контролем тока.
В схемах применены три ступени пучкового резистора (R1 — R3) и три контактора ускорения (КМ2 — КМ4), одна ступень динамического торможения и противовключения R4 и один контактор торможения (противовключения) КМ5.
Усиление магнитного потока осуществляется размыкающим контактом токового реле КА, цепь через который создается при включении контактора торможения КМ5, а цепь замыкающего контакта КА, служащего для ослабления магнитного потока при пуске, при этом разрывается размыкающим вспомогательным контактом контактора КМ5.
Реле КА в начале торможения замыкается от броска тормозного тока, а затем при спадании тока размыкается и усиливает магнитный поток, что приводит к возрастанию тока, включению реле КА и ослаблению магнитного потока. За несколько переключений реле магнитный поток усиливается до номинального значения. Далее в схемах будет происходить динамическое торможение и противовключением в соответствии с характеристиками, определяемыми резисторами R4 и R1— R4.
Реле КА настраивается так, чтобы его токи переключения были выше минимального значении тормозного тока, что важно при торможении противовключеиием.







