- Схемы управления асинхронным двигателем в формате dwg
- Схема управления нереверсивным двигателем – «прямой пуск»
- Схема реверсивного управления двигателем
- Схема управления двигателем «звезда-треугольник»
- Чтение схем управления электроприводами
- Схема управления нереверсивным электродвигателем
- Электрические принципиальные схемы управления электродвигателями с помощью магнитных пускателей
- Схемы управления электродвигателями
- Подписка на рассылку
- Основные схемы управления асинхронным электродвигателем
- Схема управления трехфазным асинхронным двигателем – советы электрика
- Управление скоростью вращения однофазных двигателей
- Регулирование напряжением
- Автотрансформаторное регулирование напряжения
- Тиристорный регулятор оборотов двигателя
- Транзисторный регулятор напряжения
- Частотное регулирование
- Преобразователи для однофазных двигателей
- Использование ЧП для трёхфазных двигателей
- Схема управления асинхронным двигателем с короткозамкнутым ротором
- Нереверсивная схема управления асинхронного двигателя
- Реостатный пуск асинхронного двигателя с кз ротором
- Реверсивный пуск асинхронного двигателя
- Реверсивное управление асинхронным электродвигателем с короткозамкнутым ротором
- Схема запуска и реверсивного управления трёхфазного асинхронного электродвигателя с короткозамкнутым ротором
- Управление бесколлекторным двигателем – схемотехника
- Схемы управления электроприводами
Схемы управления асинхронным двигателем в формате dwg
В данной статье речь пойдет о схемах управления асинхронным двигателем (АД). В настоящее время существуют три наиболее часто используемые схемы управления асинхронным двигателем с короткозамкнутым ротором:
- схема управления нереверсивным двигателем – «прямой пуск»;
- схема реверсивного управления двигателем;
- схема управления двигателем «звезда-треугольник».
В конце данной статьи, вы сможете скачать данные схемы выполненные в программе AutoCad в формате dwg.
Схема управления нереверсивным двигателем – «прямой пуск»
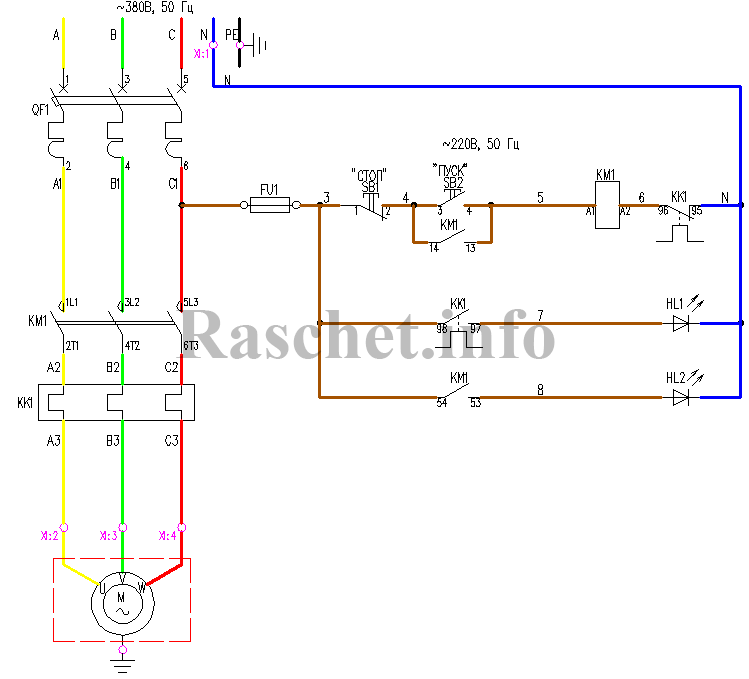
Данная схема состоит из следующих устройств:
- автоматический трехполюсный выключатель – QF1 (защита цепей питания двигателя
380В);
220В);
При нажатии кнопки SB2 «ПУСК» подается напряжение на катушку контактора КМ1. Контактор срабатывает и своими силовыми контактами подключает к сети 380В асинхронный двигатель. При этом своими контактами 14-13 шунтирует кнопку SB2, делается это для того, чтобы катушка контактора была постоянно под напряжением и он не отключался при отпускании кнопки SB2.
Отключение двигателя происходит нажатием кнопки SB1 «СТОП». Для защиты от перегрузки двигателя применяется тепловое реле КК1, в случае перегрузки двигателя, контакты 96-95 реле КК1 размыкаются снимая напряжение с катушки контактора КМ1.
Схема реверсивного управления двигателем
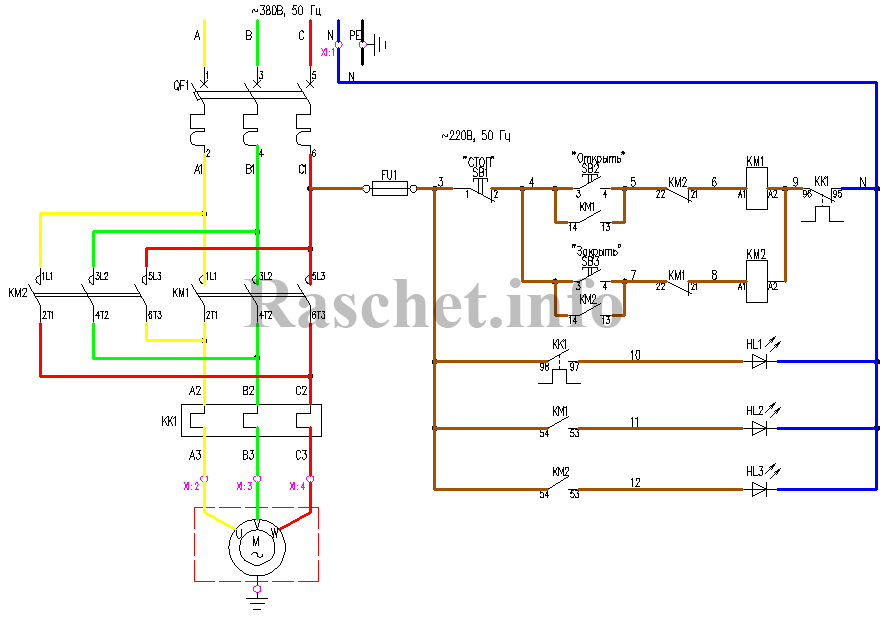
Отличие данной схемы от предыдущей схемы в том, что изменяя порядок чередования фаз на статоре двигателя, мы изменяем направление вращения ротора двигателя «Вправо» — «Влево».
При нажатии кнопки SB2 «Открыть» (в данном примере схема используется для управления реверсивной задвижкой) срабатывает контактор КМ1 и ротор двигателя вращается в одну сторону при этом задвижка открывается. В этом случае порядок чередования – А, В, С.
Что бы ротор двигателя вращался в другую сторону, нужно сначала нажать кнопку SB1 «СТОП» и лишь потом нажать кнопку SB3 «Закрыть», в результате сработает контактор КМ2 и ротор двигателя вращается в обратную сторону при этом задвижка закрывается. Порядок чередования фаз – С, В, А.
Во избежание короткого замыкания при одновременном нажатии кнопок SB2 и SB3 используются нормально-закрытые контакты 22-21 контакторов КМ1 и КМ2 и таким образом исключается возможность включения одного контактора пока не обесточится другой.
Схема управления двигателем «звезда-треугольник»
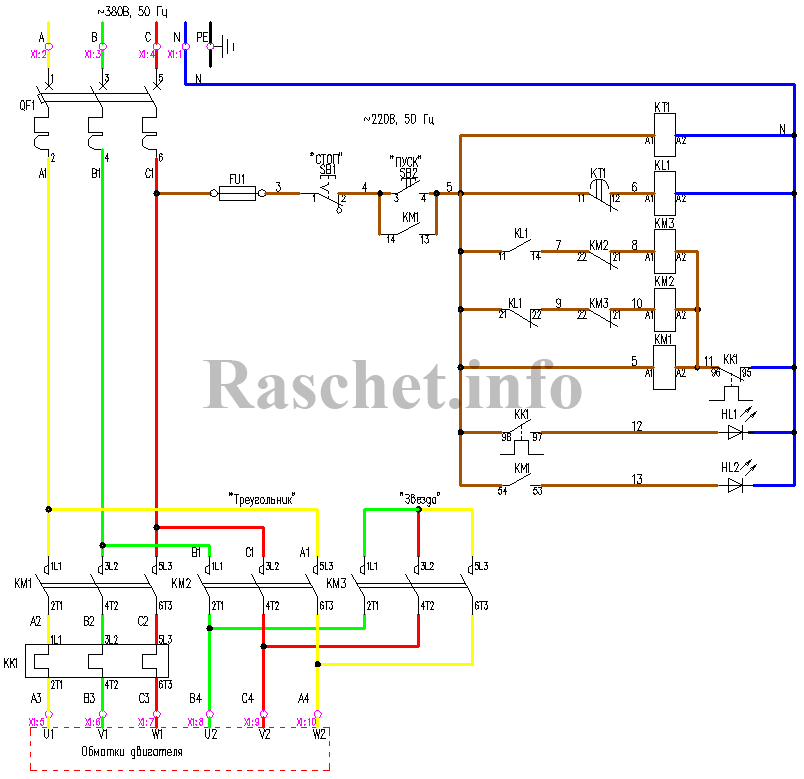
Данная схема применяется когда нужно уменьшить пусковой ток двигателя, в основном она используется для двигателей большой мощности.
В момент пуска, обмотки статора двигателя соединены в «звезду», после того как двигатель разогнался, происходит переключение обмоток статора со «звезды» на «треугольник».
Подробно об изменении мощности при схеме соединении двигателя звезда-треугольник рассмотрено в статье: «Расчет мощности двигателя при схеме соединения звезда-треугольник».
При нажатии кнопки SB2 «ПУСК» подается напряжение на катушку реле времени КТ1, контактора КМ1 и промежуточного реле KL1. Реле KL1 добавлено в схему в связи с тем, что у реле времени есть только одна группа блок-контактов, если же у Вашего реле времени есть дополнительная группа блок-контактов, реле KL1 – не используется. Не много забегая вперед, в архиве вы сможете найти схему управления двигателем «звезда-треугольник» без промежуточного реле KL1.
После того как сработало реле KL1 мгновенно замыкаются его контакты 11-14 и через нормально закрытые контакты 22-21 контактора КМ2 срабатывает контактор КМ3. При этом контакты 21-22 реле KL1 размыкаются, тем самым выполняется блокировка от одновременного включения контакторов КМ3 и КМ2.
Когда контактор КМ3 сработал, он своими силовыми контактами соединяет обмотку статора двигателя «звездой».
После того как двигатель разогнался при пониженном напряжении, контакты реле времени КТ1 11-12 разомкнутся, тем самым сняв напряжение с катушки реле KL1, в это время контакты реле KL1 11-14 размыкают цепь включения контактора КМ3, а в цепи включения контактора КМ2 замыкаются, и если контакты 21-22 контактора КМ3 замкнуты, то включается контактор КМ2.
После этого контактор КМ2 своими силовыми контактами соединяет обмотку статора двигателя «треугольником».
На этом процесс подключения двигателя к сети
380 В – заканчивается.
В архиве вы сможете найти следующие схемы в формате dwg:
- схема управления нереверсивным двигателем – «прямой пуск»
- схема реверсивного управления двигателем
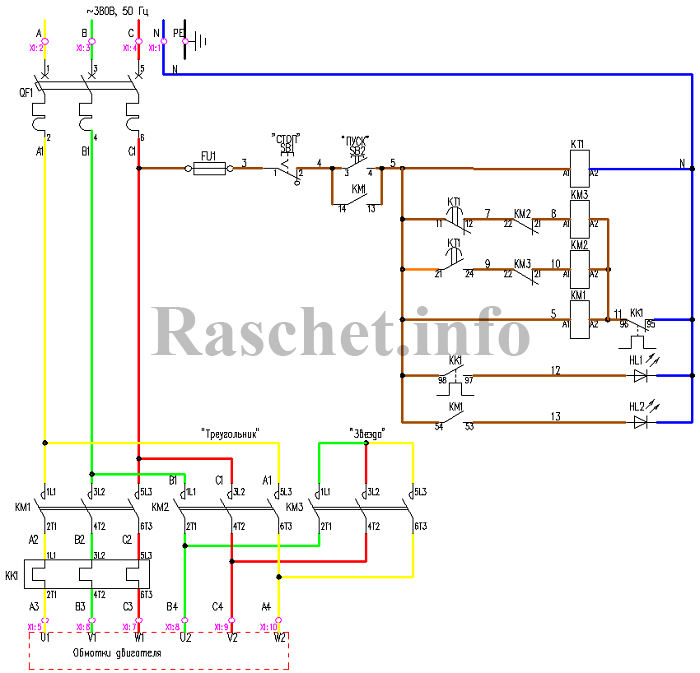
- схема управления двигателем «звезда-треугольник» с реле времени и промежуточным реле
- схема управления двигателем «звезда-треугольник» с реле времени
Чтение схем управления электроприводами
Для управления электрооборудованием силовых электрических цепей применяют различные устройства дистанционного управления, защиты, телемеханики и автоматики, воздействующие на его аппараты. Рассмотрим ряд схем управления асинхронными электродвигателями.
Схема управления нереверсивным электродвигателем
Принципиальная схема нереверсивного управления асинхронным электродвигателем, выполненная совмещенным и разнесенным способами, показана на рис. 1.
Элементы, составляющие схему управления; кнопки SВ1 и SВ2, контакты электротепловых реле КК1 и КК2, катушка магнитного пускателя КМ − образуют одну цепь, включенную между фазами С и А той же электрической сети, к которой подключен управляемый электродвигатель М.
Для включения электродвигателя М нажимают на кнопку SВ2, замыкающую цепь катушки магнитного пускателя КМ, который включается и замыкает свои силовые контакты и вспомогательный контакт, шунтирующий кнопку SВ2. Этим обеспечивается удержание магнитного пускателя во включенном положении после отпускания кнопки SВ2.
Для отключения электродвигателя М нажимают кнопку SВ1, размыкающую цепь катушки магнитного пускателя КМ. При перегрузке электродвигателя срабатывают электротепловые реле КК1 и КК2, размыкающие свои контакты в цепи управления, магнитный пускатель отключается и электродвигатель останавливается.
Электрические принципиальные схемы управления электродвигателями с помощью магнитных пускателей
На схемах рис. 2 — 4 показаны контакты пускателей КМ, нагревательные элементы тепловых реле КК, включенные в цепи питания электродвигателей, кнопочные элементы SB1 и SB2, катушки пускателей КМ, предохранители FU в цепях управления. В системах с глухозаземленной нейтралью питающей сети показан четвертый провод N как нулевой защитный проводник, присоединенный к корпусу электродвигателя; к этому проводу обычно присоединяются цепи управления и сигнализации для получения напряжения 220 В в этих цепях.
В схеме рис. 2 включение магнитного пускателя происходит при нажатии на кнопку SB1, когда катушка КМ пускателя будет под напряжением. После включения магнитного пускателя его вспомогательный замыкающий контакт КМ включается параллельно кнопочному элементу SB1, и кнопку можно отпустить.
Отключение магнитного пускателя можно произвести кнопкой SB2 «Стоп». Пускатель отключается автоматически:
- при перерыве в электроснабжении (нулевая защита); при коротких замыканиях в питающей сети до М;
- при срабатывании автоматического выключателя, который может быть установлен в цепи питания нескольких М;
- при перегрузке М, когда срабатывает тепловое реле КК;
- при коротком замыкании в цепи управления, когда перегорает предохранитель FU.
Схемы управления электродвигателями
Подписка на рассылку
 Современное оборудование часто работает в автоматическом и полуавтоматическом режиме. Это позволяет исключить пресловутый человеческий фактор, увеличить объемы и темпы производимых операций, сделать производство более рентабельным. Одним из главных факторов надежной работы современного оборудования является безупречное выполнение включения электродвигателей, которое выполняется в заданной последовательности и с соблюдением штатного режима работы. Схемы управления электродвигателями могут быть различны, так как принципы автоматического и полуавтоматического режима работы могут существенно отличаться друг от друга.
Современное оборудование часто работает в автоматическом и полуавтоматическом режиме. Это позволяет исключить пресловутый человеческий фактор, увеличить объемы и темпы производимых операций, сделать производство более рентабельным. Одним из главных факторов надежной работы современного оборудования является безупречное выполнение включения электродвигателей, которое выполняется в заданной последовательности и с соблюдением штатного режима работы. Схемы управления электродвигателями могут быть различны, так как принципы автоматического и полуавтоматического режима работы могут существенно отличаться друг от друга.
Полуавтоматическое управление предусматривает участие оператора, который инициирует пуск оборудования нажатием соответственной кнопки или поворачивая рычаг. После этого функция персонала заключается лишь в контроле рабочего процесса. При автоматическом управлении первоначальный пуск оборудования осуществляют реле или датчики, после чего работы выполняется в соответствие с заданными программами. Такое программное устройство часто выполняется с помощью логических схем, вариантов которых может быть довольно много. В промышленности наиболее часто встречаются следующие схемы управления асинхронными электродвигателями:
• нереверсивного управления;
• реверсивного управления с двумя магнитными пускателями.
Основные схемы управления асинхронным электродвигателем
При использовании схемы управления электродвигателем с нереверсивным управлением после пуска происходит подключение к сети электромагнитной катушки. С ее сердечником соприкасается подвижный якорь и замыкает силовые контакты. В результате на двигатель подается трехфазное напряжение. Параллельно с силовыми контактами замыкаются блокировочные, что позволяет зашунтировать кнопку пуска и отпустить ее. Нажимая кнопку стоп, оператор тем самым разрывает цепь, от которой запитана электромагнитная катушка. Это освобождает якорь, который при падении размыкает силовые контакты, что приводит к остановке оборудования. В этой схеме управления защита от длительной перегрузки обеспечивается подключением к двум фазам тепловых реле.
Схема управления реверсивным электродвигателем имеет два магнитных пускателя. Один из них соединяет схему включения на прямое вращение, а второй – на обратное включение. Кнопками «вперед» и «назад» подключаются те электромагнитные катушки, которые отвечают за соответствующую операцию. Реверсивные пускатели состоят из двух нереверсивных пускателей, имеют механическую блокировку, исключающую одновременное включение. Остановка двигателя включена в общую цепь управления.
Схемы управления электродвигателями постоянного тока и синхронными двигателями
Схема управления электродвигателем постоянного тока может быть следующих видов:
• с нижним расположением ключа;
• с верхним расположением ключа;
• мостовая схема.
Все они базируются на принципах ШИМ и основных характеристиках двигателя. Наиболее экономичной схемой является с нижним расположением ключа, его верхнее расположение используют при повышенных требованиях к безопасности. Мостовая схема используется при реверсивном управлении двигателем.
Синхронные двигатели сложнее асинхронных, но они менее чувствительны к колебаниям напряжения и более устойчивы к перегрузкам. Это стало причиной их широкого распространения. Схема управления синхронным электродвигателем обычно включается в себя тиристорные возбудители, которые заменили электромашинные возбудители, долгое время являвшиеся уязвимым местом этого типа электромоторов.
Схема управления трехфазным асинхронным двигателем – советы электрика
Управление скоростью вращения однофазных двигателей

Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки – рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя – разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 – скорость вращения магнитного поля
n2 – скорость вращения ротора
При этом обязательно выделяется энергия скольжения – из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз – то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор – это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи – два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно “отрезается” кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки – ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования – пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно – шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения – для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель – электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы – полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы – диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина – не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие – массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование – основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей – INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f – частота тока
С – ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя – в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого – магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
Схема управления асинхронным двигателем с короткозамкнутым ротором

Управлять асинхронными электродвигателями с короткозамкнутым ротором можно посредством контакторов. При использовании маломощных электродвигателей, для которых нет необходимости ограничивать пусковой ток, запуск производится при действующем напряжении.
Нереверсивная схема управления асинхронного двигателя
Рисунок 1 — Простейшая схема асинхронного двигателя
Для подачи напряжения на управляющую и силовую цепь используется автоматический выключатель QF. Пуск асинхронного двигателя осуществляется кнопкой SB1 «Пуск”, которая замыкает свои контакты в цепи катушки магнитного пускателя КМ.
Который срабатывая замыкает основные контакты силовой цепи статора. Вследствие чего электродвигатель М подсоединяется к питанию.
В то же время в управляющей сети происходит замыкание блокирующего контакта КМ который шунтирует кнопку SB1.
Чтобы отключить асинхронный двигатель с кз ротором, необходимо нажать клавишу SB2 «Стоп». При этом питающая сеть контактора КМ размыкается и подача напряжения на статор прекращается. После этого нужно выключают автомат QF.
Схема управления АД с кз предусматривает несколько защит:
- от КЗ — посредством автоматического выключателя QF и плавкими предохранителями FU;
- от перегрузок — посредством теплореле КК (при перегреве данные устройства отсоединяют контактор КМ, прекращая работу движка);
- нулевая защита — посредством магнитного пускателя КМ (при низком напряжении или его полном отсутствии контактор КМ оказывается незапитанным, размыкается и электродвигатель выключается).
Для подключения электродвигателя после срабатывания защитного механизма требуется снова надавить клавишу SB1.
Реостатный пуск асинхронного двигателя с кз ротором
Если невозможно запустить АД с кз ротором в стандартном режиме, используют запуск при сниженном напряжении. С этой целью в цепь статора добавляют сопротивление, реостат или используют автотрансформатор.
Автоматический выключатель QF срабатывает и на управляющую и силовую цепь поступает напряжение. После нажатия кнопки SB1 пускатель КМ1 приходит в действие, подавая электроток в цепь статора с включенным сопротивлением.
В то же время питание поступает и на реле времени КТ.
Рисунок 2 — Схема асинхронного двигателя с симметричными сопротивлениями (реостатный пуск)
Через определенный временной интервал, задаваемый реле КТ, происходит замыкание контакта КТ. В итоге пускатель КМ2 шунтирует (закорачивает) сопротивление статора. Процедура запуска электродвигателя завершается. Для его выключения необходимо нажать клавишу SB2 и выключить автомат QF.
Реверсивный пуск асинхронного двигателя
Рисунок 3. Схема реверсивный пуск асинхронного двигателя с кз ротором.
Данная схема дает возможность производить запуск электродвигателя и изменять направленность его вращения.
Для запуска необходимо включить автомат QF и нажать SB1 «Пуск», в результате чего ток поступает на магнитный пускатель КМ1, который запитывает статор.
АД реверсируется последовательным нажатием кнопок «Стоп» SB3 (КМ1 выключается и двигатель останавливается) и «Реверс» SB2 (срабатывает КМ2 и асинхронный двигатель запускается в реверсивном направлении).
В данной схеме нажатием кнопки реверса меняется чередование фаз питающего напряжения на статоре двигателя, что будет вызывать смену направленности его вращения (реверсом).
При помощи нормально замкнутых контактов КМ1 и КМ2 выполнена защита от ошибочного включения сразу двух магнитных пускателей КМ1 и КМ2. Также действуют защиты, аналогичные описанным ранее.
Отключить электродвигатель можно кнопкой SB3 и автоматом QF.
Реверсивное управление асинхронным электродвигателем с короткозамкнутым ротором

Всем привет. Рад вас видеть у себя на сайте. Тема сегодняшней статьи: Реверсивное управление асинхронным электродвигателем с короткозамкнутым ротором.
В наше время асинхронные двигателя очень широко используются на производственных предприятиях. Их устанавливают практически на всём оборудование. А ещё бы и не ставить, ведь они самые простые в конструкции, имеют самую простую схему запуска и практически не требуют профилактических ремонтов.
Но мы сегодня не будем говорить о достоинствах и преимуществах этих двигателей, давайте лучше поговорим, о том, как же изменить направления движения этих электрических машин.
Но прежде чем рассматривать схему реверса, я советую вам почитать такие статьи:
Схема пуска асинхронного двигателя.
Расчёт тока электродвигателя.
Думаю, эти статьи будут вам очень полезны.
Теперь, переходим к практике. Специально для читателей своего сайта, я нарисовал схему реверса на листке бумаги, сфотографировал её, и делюсь с вами. Картинка получилась неплохо, и все основные элементы на ней видно. Но если вдруг вам что-то не понятно, то задавайте свои вопросы в комментариях. Я с радостью на них отвечу.
Схема запуска и реверсивного управления трёхфазного асинхронного электродвигателя с короткозамкнутым ротором
Давайте для начала рассмотрим все элементы схемы.
QF – автоматический выключатель. Нужен для коммутации электрической схемы и для защиты от токов короткого замыкания.
KM1, KM2 – электромагнитные пускатели. Нужны для дистанционного запуска электродвигателя, и в данной схеме используются для реверса.
KK – тепловое реле. Используется для защиты электропривода от перегруза.
FU – предохранитель. Нужен для защиты цепей управления от токов короткого замыкания. И так же выступает в роли защиты от самопроизвольного включения привода в работу.
SB3 – кнопка стоп
SB1 – кнопка пуск «вперёд» или «вправо» и так далее.
SB2 – кнопка пуск «назад» или «влево» и так далее.
KM1, KM2 – блок-контакты электромагнитных пускателей. Нужны для подхвата.
KM1, KM2 – дополнительные блок-контакты пускателей. Выступают в роли блокировки от включения двух пускателей одновременно.
KM1, KM2 – катушки пускателей. Нужны для управления электромагнитными пускателями.
К – контакт теплового реле.
По элементам разобрались. Теперь давайте поговорим о том, как работает эта схема.
Для того чтобы запустить в работу электродвигатель, мы должны подать на него напряжение. Для этого включаем автоматический выключатель QF. Напряжение подаётся на контакты пускателей, и на цепь управления.
Теперь, чтобы двигатель начал вращаться нажимаем кнопку SB1. Этим действием мы подаём напряжение на катушку пускателя КМ1, пускатель втягивается, замыкаются силовые контакты и так же замыкается блок-контакт КМ1, а блок-контакт КМ2 размыкается. Двигатель при этом начинает вращаться
Теперь, чтобы запустить двигатель в другую сторону, нам нужно его сначала остановить. Для этого нажимаем кнопку SB3. Этим движением мы прекращаем подачу напряжения на цепь управления, и двигатель в любом случае остановиться, независимо от того в какую сторону он вращался.
Теперь для запуска электродвигателя в противоположную сторону. Нажимаем кнопку SB2. Напряжение подаются на катушку второго пускателя, он втягивается, замыкаются силовые контакты, замыкаются блок-контакты для подхвата, и размыкаются дополнительные блок-контакты. Двигатель начинает вращаться.
По сути, если разобраться, то схема очень простая. Главное понять принцип действия, и тогда вы легко сможете эту схему, переделать под свой какой-то вариант.
На этом у меня всё. Если есть вопросы, то задавайте их в комментариях. Если статья была вам полезной, то поделитесь нею со своими друзьями в социальных сетях, вступайте в группу и подписывайтесь на обновления сайта. Пока.
С уважением Александр!
Управление бесколлекторным двигателем – схемотехника

Основная задача блока управления бесколлекторным двигателем – переключать обмотки статора в зависимости от положения ротора.
В двигателе постоянного тока эту задачу выполняет коллектор – диск на роторе с контактными площадками, по которому скользят токопроводящие графитовые щетки и переключают обмотки.
В асинхронном двигателе знать положение ротора не нужно, но для регулировки скорости нужно менять частоту переключения обмоток (или работать от сети со стандартной частотой 50Гц)
Я начинал изучение схемотехники драйвера бесколлекторного двигателя по апноте Atmel “AVR492: Управление бесколлекторным электродвигателем постоянного тока с помощью AT90PWM3” Она есть на русском языке. Немного пояснений: “Для управления БКЭПТ используется силовой каскад, состоящих из 3 полумостов. Схема силового каскада показана на рисунке 4.”
Здесь силовой каскад – это 6 транзисторов, схематично показанных ключами CmdSW, полумост – пара транзисторов, соединенных последовательно между “+” и “-” питания, например CmdSW1, CmdSW2. A, B, C – выводы обмоток двигателя, соединение обмоток между собой как у асинхронных двигателей. Эта схема позволяет току протекать между фазами A, B, C в любом направлении. Например если замкнуть ключ CmdSW1 и CmdSW4, то ток потечет от вывода A к выводу B, а если замкнуть CmdSW3 и CmdSW2 – от вывода В к выводу A. А если замкнуть CmdSW1 и CmdSW2 – получится короткое замыкание с выгоранием транзисторов, так что управлять транзисторами нужно осторожно. Кстати для управления коллекторым двигателем с реверсом нужно 2 полумоста, без реверса – 1 транзистор.
Для регулирования силы тока в фазе используют широтно-импульсную модуляцию (ШИМ). Например часть времени открывают ключи CmdSW1, CmdSW4 и ток начинает течь от “A” к “B”, затем закрывают CmdSW1 и открывают CmdSW2 и за счет индуктивности обмоток ток продолжить течь по кольцу A-B-CmdSW4-“земля”-CmdSW2. Кстати в транзисторы встроены диоды, проводящие ток в обратном направлении. Так что если во второй фазе ШИМ разомкнуть все транзисторы, то в обмотке начнет расти напряжение и через эти диоды энергия из обмоток начнет возвращаться в сеть.
Эта схема из 6 транзисторов называется трехфазным инвертором и применяется для преобразования постоянного тока в трехфазный переменный для питания как бесколлекторных, так и асинхронных двигателей. Для бесколлекторных двигателей применяются низковольтные полевые транзисторы (MOSFET), для асинхронных двигателей – высоковольтные биполярные транзисторы с изолированным затвором (IGBT). С помощью этой схемы можно осуществлять и рекуперацию. Её используют все и лучше не сделать.
Как инвертор бывает оформлен в зависимости от мощности двигателя:
Для управления двигателями очень маленькой мощности используются специализированные микросхемы, в которой уже находятся 6 транзисторов и логика для управления ими. Это решение для двигателей дисководов и вентиляторов.
Следующий шаг – микросхема, управляющая транзисторами и транзисторы отдельно. И для высоких мощностей микросхема или контроллер управляет микросхемами драйверов транзисторов, а драйвера уже управляют самими транзисторами.
Зачем такие сложности? Мощные транзисторы имеют управляющий вход с большей емкостью, слабая электроника не в состоянии обеспечить токи до нескольких ампер для быстрого их открытия.
А у полуоткрытого транзистора большое сопротивление, он в этот момент греется или даже сгорает 🙂 Поэтому используют микросхемы-драйверы, внутри которых кстати тоже транзисторы, только менее мощные. Получается такой каскад из транзисторов.
Вот первый пример реализации инвертора – авиамодельный, самый дешевый. Фото с двух сторон.
На одной стороне видно 6 транзисторов в корпусах SOIC. (3 N-канальных, 3 P-канальных), на другой стороне микроконтроллер ATMEGA8 и линейный стабилизатор для получения 5В питания. Ещё есть электролитический конденсатор и всякая мелочь – резисторы с конденсаторами. И всё.
Дешево и сердито. Цена в рознице около 1000р. Микроконтроллер напрямую управляет затворами транзисторов. Греется такой контроллер довольно сильно, но так как он устанавливается на авиамодели, то хорошо обдувается.
Разумеется есть более продвинутые модели, это просто пример упрощения и миниатюризации.
А вот фотография демо-платы от Atmel
Предполагается, что можно купить её и сразу начать программировать контроллер, пытаться крутить двигатель. Я решил не покупать, возможно зря.
Во всяком случае к ней неплохо бы продавать сразу запасные транзисторы, я их сжег не один раз. И контроллер пару раз.
Собственно 6 транзисторов справа, контроллер слева, драйвера транзисторов на другой стороне.
Схема моего драйвера с пояснениями
Я решил не делать простейший драйвер с тем, чтобы расширить возможности его применения, при необходимости несложно будет упростить. Схема разбита на 3 части. Она не такая наглядная, как в апноте Atmel, но постараюсь всё пояснить.
Первая часть – силовая
Силовые транзисторы VT1-VT6 управляются микросхемами-драйверами DA1-DA3. Транзисторы я выбрал IRLR3705 как одни из наиболее мощных в корпусе D-Pak на напряжение 55V с сопротивлением 8мОм. Я рассчитывал на напряжение работы 36В плюс запас. В принципе можно ставить транзисторы на радиаторы и использовать корпуса TO-220, но я решил не усложнять монтаж и паять транзисторы на плату.
В таком случае для меньших мощностей можно ставить транзисторы в корпусе soic, а для больших – в D2-Pak. Драйвера взял самые мощные из полумостовых от фирмы International Rectifier – irf2186s с током управления до 4A.
Получился большой запас, но самые простые драйвера ir2101 из апнота атмел (ток 130/270мА) с мощными транзисторами справлялись плохо, разница в нагреве транзисторов была ощутима.
Полумостовой драйвер управляет двумя транзисторами – верхним и нижним, для управления верхним транзистором нужно высокое напряжение, которое получается по бустрепной схеме питания с помощью диода и конденсатора (например C6, DD7), эта схема наиболее проста и принцип её можно легко найти в интернете.
Можно было взять одну микросхему full-brige для управления сразу шестью транзисторами, но у меня разводка с ней получалась хуже. Между затворами транзисторов и драйверами – резисторы с диодом. Они ограничивают ток затвора, причем ток зарядки почти в 2 раза больше. Тут следующая логика – чем больше ток, тем меньше греются транзисторы при переключении, но растут всплески напряжения.
Поэтому номинал резисторов нужно уменьшать до какого-либо разумного предела. Причем транзистор открывается медленнее, чем закрывается, поэтому ток зарядки я сделал больше. Сигнальные выводы драйверов подтянуты к земле на всякий случай, чтоб не сработали когда нет сигналов управления. В целом здесь всё почти так же, как в апноте атмел.
Датчики холла также подключил как в апноте, здесь ничего интересного. Питание, силовые Выводы транзисторов и выводы датчиков холла выведены на клеммник X1. Для защиты от короткого замыкания нужно контролировать ток.
Для этого служат резисторы R19, R21 суммарным сопротивлением 0,005Ом (в апноте был резистор 0,1Ом), падение напряжение на них усиливается микросхемой LM358 и идет на компаратор и АЦП контроллера. Реализация у меня получилась не очень удачной, но в большинстве случаев защита срабатывает. Неплохо было бы ставить переменный резистор, чтобы пользователь мог задавать порого срабатывания защиты, но это как-нибудь потом ). Также в контроллер заведен сигнал V_IN_MEAS, пропорцональный входному напряжению. Сделано это, чтобы не давать работать драйверу при входном напряжении более 36В, но защиту я пока не включил.
Из входного питания 24..36В нужно получить 12В для питания драйверов транзисторов и 5В для остальной логикиДля получения 12В я использовал линейный стабилизатор MC78M12. Лишнее напряжение он просто рассеивает в виде тепла, но так как драйверы транзисторов поребляют не очень много нагрев приемлемый.
Для 5В питания линейный стабилизатор уже применить не получилось, потому что 5В ещё задумывалось использовать для питания внешнего экрана индикации и нагрев оказался слишком большим. Поэтому применил понижающий преобразователь L5973AD.
Он не очень дорогой, но в отличии от ещё более дешевых вариантов имеет защиту от короткого замыкания на выходе. Внешняя обвязка для него и разводка дорожек выполнена по соответствующей апноте.
Обе эти микросхемы имеют максимально допустимое напряжение 35В.
Для гашения возможного излишнего напряжения предназначена конструкция из транзисторов VT7, VT8 и стабилитрона VD3.
Последняя часть схемы – микроконтроллер AT90PWM3B с обвязкой.
- 6 выводов PSCOUT_XX используются для управления драйверами транзисторов.
- 3 вывода HALL_X используются для отслеживания датчиков холла двигателя.
- 3 вывода задействованы на микропереключатель SA1 – он служит для переключения интерфейсов драйвера (RS485 либо переменный резистор с кнопками), выбора числа пар полюсов подключенного двигателя (2 либо 4) и для проведения калибровки двигателя (определение положения датчиков холла)
- 3 вывода задействованы для управления микросхемой-драйвером RS485
- 6 выводов задействованы под вариант традиционного управления драйвером – с кнопками и переменным резистором. 4 кнопки служат для включения/выключения (Enable), реверса(F/R), тормоза(Brake) и выбора режима поддержания скорости(Mode). Еще один вывод Speed(analog) для переменного резистора задания скорости и на последний выход Hall_out подаются импульсы при срабатывании датчиков холла. Эти выводы и выводы интерфейса RS485 выведены на клеммник X3.
- 2 вывода задействованы для контроля сигнала токового шунта ERROR_ADC. Один для быстрого срабатывания защиты, другой для грубой оценки потребляемого тока.
- 1 вывод для контроля входного напряжения V_IN_MEAS
- 1 вывод для светодиода VD5, полезного для индикации различных событий.
Также на схеме есть разъем программирования контроллера X2
Представленная схемотехника конечно не соответствует первоначальной идее о максимально дешевом драйвере, но относительно легко может быть упрощена. Можно убрать интерфейс RS485, поставить менее мощные транзисторы и драйверы управления ими.
Схемы управления электроприводами

Управление приводами включает в себя пуск электродвигателя в работу, регулирование скорости вращения, изменение направления вращения, торможение и останов электродвигателя.
Для управления приводами применяются электрические коммутационные аппараты, такие как автоматические и неавтоматические выключатели, контакторы и магнитные пускатели.
Для защиты электродвигателей от ненормальных режимов (перегрузок и коротких замыканий) применяются автоматические выключатели, предохранители и тепловые реле.
Управление электродвигателями с короткозамкнутым ротором. На рис. 2.8 приведена схема управления асинхронным двигателем с короткозамкнутым ротором с помощью магнитного пускателя.
Рис. 2.8. Схема управления асинхронным электродвигателем с короткозамкнутым ротором с помощью магнитного пускателя: Q – выключатель; F – предохранитель;
КМ – магнитный пускатель, КК1, КК2 – тепловое реле; SBC – кнопочный выключатель включения двигателя; SBT – кнопочный выключатель отключения двигателя
Магнитные пускатели широко применяются для двигателей мощностью до 100 кВт. Они применяются в продолжительном иповторнократковременном режиме работы привода. Магнитный пускатель позволяет осуществлять дистанционный пуск. Для включения электродвигателя М первым включается выключатель Q.
Пуск двигателя в работу осуществляется включением кнопочного выключателя SBС. Катушка (электромагнит включения) магнитного пускателя КМ получает питание от сети и замыкает контакты КМ в главной цепи и в цепи управления.
Вспомогательный контакт КМ в цепи управления шунтирует кнопочный выключатель SBС и обеспечивает продолжительную работу привода после снятия нагрузки нажатия с кнопочного выключателя. Для защиты электродвигателя от перегрузки в магнитном пускателе имеются тепловые реле КК1 и КК2, включаемые в две фазы электродвигателя.
Вспомогательные контакты этих реле включаются в цепь питания катушки КМ магнитного пускателя. Для защиты от коротких замыканий в каждой фазе главной цепи электродвигателя устанавливаются предохранители F. Предохранители могут устанавливаться и в цепи управления.
В реальных схемах неавтоматический выключатель Q и предохранители Fмогут быть заменены автоматическим выключателем. Отключение электродвигателя осуществляется нажатием на кнопочный выключатель SBТ.
Простейшая схема управления электродвигателем может иметь только неавтоматический выключательQи предохранителиF или автоматический выключатель.
Во многих случаях при управлении электроприводом необходимо изменять направление вращения электродвигателя. Для этого применяются реверсивные магнитные пускатели.
На рис. 2.9 приведена схема управления асинхронным электродвигателем с короткозамкнутым ротором с помощью реверсивного магнитного пускателя. Для включения электродвигателя М должен быть включен выключатель Q.
Включение электродвигателя для одного направления, условно «Вперед», производится нажатием кнопочного выключателя SBС1в цепи питания катушки КМ1 магнитного пускателя.
При этом катушка (электромагнит включения) магнитного пускателя КМ1 получает питание от сети и замыкает контакты КМ1 в
главной цепи и в цепи управления. Вспомогательный контакт КМ1 в цепи управления шунтирует кнопочный выключатель SBС1 и обеспечивает продолжительную работу привода после снятия нагрузки нажатия с кнопочного выключателя.
Рис. 2.9. Схема управления асинхронным электродвигателем с короткозамкнутым ротором с помощью реверсивного магнитного пускателя: Q – выключатель; F – предохранитель; КМ1, КМ2 – магнитный пускатель, КК1, КК2 – тепловое реле; SBC1, SBC2 – кнопочный выключатель включения двигателя; SBT – кнопочный выключатель отключения двигателя
Для пуска электродвигателя в противоположном направлении, условно
«Назад», необходимо нажать кнопочный выключатель SBС2. Кнопочные выключатели SBС1и SBС2 имеют электрическую блокировку, исключающую возможность одновременного включения катушек КМ1 и КМ2. Для этого в цепь катушки КМ1 включается вспомогательный контакт пускателя КМ2, а в цепь катушки КМ2 – вспомогательный контакт КМ1.
Для отключения электродвигателя от сети при его вращении в любом направлении необходимо нажать на кнопочный выключатель SBТ. При этом цепь любой катушки и КМ1 и КМ2 разрывается, их контакты в главной цепи электродвигателя размыкаются, и электродвигатель останавливается.
Схема реверсивного включения может в обоснованных случаях применяться для торможения двигателя противовключением.
Управление электродвигателями с фазным ротором. На рис. 2.10 приведена схема управления асинхронным двигателем с фазным ротором.
Рис. 2.10. Схема управления асинхронным двигателем
с фазным ротором: QF – выключатель; КМ – магнитный пускатель в цепи статора, КМ1 – КМ3 – магнитный пускатель ускорения; SBC – кнопочный выключатель включения двигателя;R – пусковой реостат; SBT – кнопочный выключатель отключения двигателя
В приведенной схеме защита двигателя М от коротких замыканий и перегрузок осуществляется автоматическим выключателем QF. Для уменьшения пускового тока и увеличения пускового момента в цепь ротора включен трехступенчатый пусковой реостат R. Количество ступеней может быть различным. Пуск электродвигателя осуществляется линейным контактором КМ и контакторами ускорения КМ1 – КМ3.
Контакторы снабжены реле времени. После включения автоматического выключателя QF кнопочным выключателем SBC включается линейный контактор КМ, который мгновенно замыкает свои контакты в главной цепи и шунтирует контакты кнопочного выключателя SBC. Двигатель начинает вращаться при полностью введенном пусковом реостате R (механическая характеристика 1 на рис. 2.11).
Точка П является точкой трогания.
Рис. 2.11. Механические характеристики асинхронного двигателя с фазным ротором: 1, 2, 3 –
при включении ступеней пускового реостата; 4 – естественная;
Контакт реле времени КМ в цепи катушки контактора КМ1 с выдержкой времени t1 (рис. 2.12) включает контактор КМ1, который замыкает контакты первой ступени в цепи пускового реостата. С выдержкой времени t2включается контактор КМ2. Аналогично проходит процесс переключения ступеней пускового реостата R до перехода электропривода на естественную характеристику (кривая 4).
Изменение тока статора Iи частоты вращения ротора n2во время пуска электродвигателя показано на рис. 2.12.
Рис. 2.12. Изменение тока статора и частоты вращения ротора асинхронного двигателя с фазным ротором во время пуска
На естественной характеристике ток статора и частота вращения ротора достигают номинальных значений.
Остановка электродвигателя осуществляется кнопочным выключателем SBT.
Электрическая блокировка в приводах. В многодвигательных приводах или приводах механизмов, связанных общей технологической зависимостью, должна быть обеспечена определенная очередность включения и отключения электродвигателей.
Это достигается применением механической или электрической блокировки. Электрическая блокировка осуществляется путем применения дополнительных вспомогательных контактов коммутационных аппаратов, участвующих в управлении приводами. На рис. 2.
13 приведена схема блокировки последовательности пуска и остановки двух электродвигателей.
Рис. 2.13. Схема блокировки последовательности управления двух электродвигателей: Q1, Q2 – выключатель; F1, F2 – предохранитель; КМ1, КМ2 – магнитный пускатель, КК1, КК2 – тепловое реле; SBC1, SBC2 – кнопочный выключатель включения двигателя;SBT1, SBT2 – кнопочный выключатель отключения двигателя; Q3 – вспомогательный выключатель
В схеме исключена возможность пуска электродвигателя М2 раньше пуска двигателя М1. Для этого в цепь управления магнитного пускателя КМ2, осуществляющего пуск и остановку электродвигателя М2, включен замыкающий вспомогательный контакт КМ1, связанный с пускателем КМ1. В случае остановки электродвигателя М1 этот же контакт произведет автоматическое отключение двигателя М2.
При необходимости самостоятельного пуска электродвигателя при опробовании механизма в цепи управления имеется выключатель Q3, который необходимо предварительно замкнуть. Включение электродвигателя М2 осуществляется кнопочным выключателем SBC2, а отключение – SBТ2. Включение двигателя М1 осуществляется выключателем SBC1, а отключение – SBT1.
При этом отключается и выключатель М2.
Регулирование скорости рабочего органа машины или механизма. Скорость рабочего органа машины можно изменить за счет применения редукторов или путем изменения частоты вращения электродвигателя. Частоту вращения электродвигателя можно изменить несколькими способами.
В строительных машинах и механизмах применяют редукторы с зубчатой, ременной и цепной передачами, позволяющими изменять передаточное число. В приводах, где применяются двигатели с короткозамкнутым ротором, частоту вращения электродвигателя изменяют путем изменения числа пар полюсов.
Для этих целей применяют либо электродвигатель с двумя обмотками статора, каждая из которых имеет разное количество пар полюсов, либо электродвигатель с переключением секций фазных обмоток статора.
Возможно регулирование частоты вращения изменением напряжения на обмотке статора. Для этих целей используются автотрансформаторы с плавным регулированием напряжения, магнитные усилители, тиристорные регуляторы напряжения.







