- Возбуждение двигателя постоянного тока. Схемы возбуждения.
- Принцип и схема работы двигателя постоянного тока с параллельным возбуждением
- Построение двигателя и область его применения
- Поведение электромотора при изменении нагрузок
- Разновидности подходов к регулированию частоты вращения
- Двигатель с независимым возбуждением
- Заключение
- Управление возбуждением двигателей постоянного тока
Возбуждение двигателя постоянного тока. Схемы возбуждения.
Возбуждение двигателя постоянного тока является отличительной особенностью таких двигателей. От типа возбуждения зависят механические характеристики электрических машин постоянного тока. Возбуждение может быть параллельным последовательным смешанным и независимым. Тип возбуждения означает, в какой последовательности включены обмотки якоря и ротора.
При параллельном возбуждении обмотки якоря и ротора включаются параллельно друг другу к одному источнику тока. Так как у обмотки возбуждения больше витков чем у якорной то и ток в ней течет незначительный. В цепи, как обмотки ротора, так и обмотки якоря могут включаться регулировочные сопротивления.
Обмотка возбуждения может подключаться и к отдельному источнику тока. В этом случае возбуждение будет называться независимым. У такого двигателя характеристики будут схожи с двигателем, в котором применяется постоянный магнит. Скорость вращения двигателя с независимым возбуждением, как и у двигателя с параллельным возбуждением зависит от тока якоря и основного магнитного потока. Основной магнитный поток создается обмоткой ротора.
Скорость вращения можно регулировать с помощью реостата включенного в цепь якоря изменяя тем самым ток в нем. Также можно регулировать ток возбуждения, но здесь нужно быть осторожным. Так как при его чрезмерном уменьшении или полном отсутствии в результате обрыва питающего провода ток в якоре может возрасти до опасных значений.
Также при малой нагрузке на валу или в режиме холостого хода скорость вращения может настолько увеличится, что может привести к механическому разрушению двигателя.
Если обмотка возбуждения включена последовательно с якорной, то такое возбуждение называется последовательным. При этом через якорь и обмотку возбуждения протекает один и тот же ток. Таким образом, магнитный поток изменяется с изменением нагрузки двигателя. А следовательно скорость двигателя будет зависеть от нагрузки.
Двигатели с таким возбуждением нельзя запускать на холостом ходу либо с небольшой нагрузкой на вал. Их применяют в том случае если, требуется большой пусковой момент или способность выдерживать кратковременные перегрузки.
При смешанном возбуждении используются двигатели, у которых на каждом полюсе есть по две обмотки. Их можно включить так чтобы магнитные потоки как складывались, так и вычитались.
В зависимости от того как соотносятся магнитные потоки двигатель с таким возбуждением может работать как двигатель с последовательным так и двигатель с параллельным возбуждением. Все зависит от ситуации, если нужен большой стартовый момент, такая машина работает в режиме согласного включения обмоток. Если же необходима постоянная скорость вращения, при динамически изменяющейся нагрузке применяют встречное включение обмоток.
В машинах постоянного тока можно изменять направление движения ротора. Для этого необходимо изменить направление тока в одной из обмоток. Якорной либо возбуждения. Изменением полярности направление вращения двигателя можно добиться только в двигателе с независимым возбуждением, или в котором используется постоянный магнит. В других схемах включения нужно переключать одну из обмоток.
Стартовый ток в машине постоянного тока достаточно велик, поэтому ее следует запускать с добавочным реостатом, чтобы избежать повреждения обмоток.
Принцип и схема работы двигателя постоянного тока с параллельным возбуждением
Существует несколько возможных разновидностей построения эл моторов, работающих от источника постоянного напряжения. Принцип их действия одинаков, а отличия заключаются в особенностях подключения обмотки возбуждения (ОВ) и якоря (Я).
Свое название эл двигатель постоянного тока с параллельным возбуждением получил потому, что его обмотка Я и ОВ соединяются друг с другом именно таким образом. Электродвигатель такой разновидности обеспечивает нужные режимы, превосходя изделия последовательного и смешанного типов тогда, когда требуется практически постоянная скорость его функционирования.
Построение двигателя и область его применения
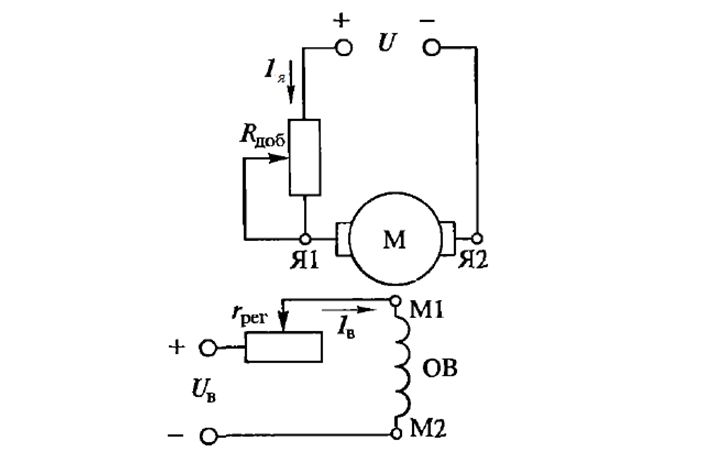
Схема электродвигателя рассматриваемого типа изображена ниже.

- общий ток, потребляемый эл мотором от источника, составляет I = IЯ + IВ, где IЯ, IВ – токи через якорь, обмотку возбуждения, соответственно,
- одновременно IВ не зависит от IЯ, то есть не зависит от нагрузки.
Устройство применяется тогда, когда пуск не требует обеспечения высокого момента, то есть когда режимы эксплуатации приводных механизмов не предполагают создание больших стартовых нагрузок. Это типично для станков и вентиляторов.
Для практики ценны такие полезные тяговые параметры подобных эл механизмов как
- устойчивость работы при колебаниях нагрузки,
- высокая экономичность из-за того, что IЯ не протекает через ОВ.
Пуск при недостаточном моменте обеспечивается переходом на схему смешанного типа.
Поведение электромотора при изменении нагрузок
Механическая характеристика показывает устойчивость работы электромотора в широком диапазоне изменения нагрузок, описывая зависимость момента, создаваемого эл двигателем, от скорости функционирования вала.
Тяговые характеристики механизма рассматриваемого типа позволяют сохранить величину момента при значительных изменения количества оборотов. Обычно тяговые параметры агрегата должен обеспечивать уменьшение этого параметра не более чем на 5 %. Несложное исследование демонстрирует: тормозные параметры из-за обратимости процессов оказываются аналогичными. Эти положения распространяются также на случай применения смешанного возбуждения.
Говоря иными словами, для такого эл мотора характерна жесткая характеристика. Такой характер работы считается важным преимуществом агрегата рассматриваемого типа.
Разновидности подходов к регулированию частоты вращения
Для агрегатов параллельного типа используются способы управления скоростью функционирования изменением:
- магнитного потока главных полюсов,
- сопротивления цепи якоря,
- подаваемого на него напряжения.
Объектом воздействия являются обмотка возбуждения, обмотка якоря, его рабочее напряжение.
Изменение магнитного потока осуществляется с помощью последовательного реостата RР. При увеличении его сопротивления ОВ пропускает меньший ток, что сопровождается уменьшением магнитного потока. Внешним проявлением такого действия становится наращивание оборотов Я на холостом ходу. Исследование показывает, что происходит увеличение угла наклона характеристики.
Второй принцип основан на включении в цепь питания якоря дополнительного последовательного регулировочного реостата. При увеличении его сопротивления скорость вращения Я уменьшается, тогда как его естественная механическая характеристика приобретает больший наклон. Из-за последовательного включения с основной обмоткой реостата дополнительного сопротивления, на котором рассеивается значительная мощность, происходит заметное падение экономичности.
Третий принцип сопровождается определенным усложнением схемных решений и требует применения отдельного регулируемого источника питания с сохранением возможности раздельного регулирования. В случае его применения в реальных условиях возможно только уменьшение частоты вращения вала.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения реализует третий подход к регулированию и интересен тем, что ОВ и М питаются от разных источников, схема его представлена ниже.
Обмотки простейшего электромотора параллельного независимого возбуждения
Для моторов в данном конструктивном исполнении Iв устанавливается неизменным, а меняется только напряжение, приложенное к М. Это сопровождается изменением числа оборотов на холостом ходу, но жесткость характеристики изменений не претерпевает.
Принцип работы такого агрегата за счет независимого функционирования двух источников оказывается более сложным. Однако, его применение дает такие важные для практики преимущества как
- плавное экономичное управление скоростью функционирования с большой глубиной,
- пуск мотора при пониженном напряжении без реостата.
В случае, если пуск происходит на нормальном напряжении, реостат ограничивает величину Iв.
Исследование показывает, что максимальное количество оборотов ограничено только сопротивлением М, а минимальное условиями отвода выделяемого тепла в процессе работы.
Характеристики в части энергопотребления и скорости срабатывания управляющей системы улучшаются в случае последовательного включения с М различных тиристорных регуляторов. Для установки числа оборотов вала и их стабилизации в процессе приведения в движение различных механизмов находят применение различные способы. Их общим характерным признаком является включение тиристорного регулятора в цепь частотной отрицательной обратной связи. Пуск такого агрегата требует реализации специальных процедур.
Заключение
Двигатель с параллельным возбуждением является очень гибким приводным механизмом и может использоваться в очень большом количестве областей там, где не требуются большие моменты при старте. Имеет несложные и надежные цепи регулирования скорости вращения, отличается простотой запуска.
Управление возбуждением двигателей постоянного тока
Управление двигателями постоянного тока
По способу возбуждения двигатели постоянного тока подразделяются аналогично генераторам на двигатели независимого (рис.1), параллельного (рис.2), последовательного (рис.3) и смешанного (рис.4) возбуждения. При параллельном, последовательном и смешанном возбуждении напряжение на обмотке возбуждения зависит от напряжения на обмотке якоря, при независимой системе возбуждения, обмотка возбуждения питается от дополнительного источника постоянного тока и не зависит от режима работы и нагрузки двигателя.
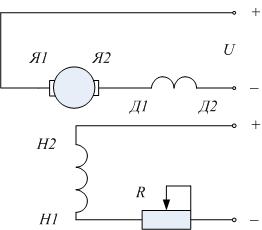 Рис.1 Схема независимого возбуждения
Рис.1 Схема независимого возбуждения
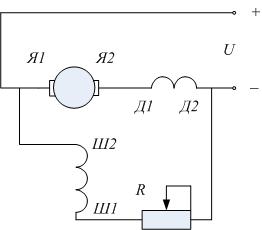 Рис.2 Схема параллельного возбуждения
Рис.2 Схема параллельного возбуждения
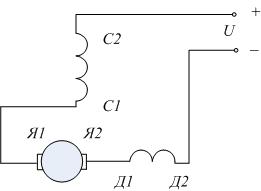 Рис.3 Схема последовательного возбуждения
Рис.3 Схема последовательного возбуждения
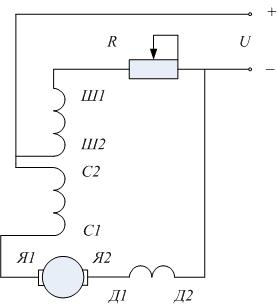 Рис.4 Схема смешанного возбуждения
Рис.4 Схема смешанного возбуждения
Для регулирования скорости двигателей постоянного тока применяют различные способы.
В общем случае скорость двигателя определяется выражением:

Как видно из выражения (1.1), регулировать скорость двигателя постоянного тока возможно двумя способами:
— Изменением питающего напряжения U
— Изменением магнитного потока машины Ф (изменением тока возбуждения)
Раньше регулирование питающего напряжения встречало трудности связанные с преобразованием напряжения постоянного тока, изменение скорости вращения двигателя осуществлялось с помощью включения в цепь якоря дополнительного регулировочного реостата. Основными недостатками этого метода являются потери в реостате, через который протекает ток полной нагрузки двигателя, неудобство управления.
Наиболее удобным, распространенным и экономичным способом регулирования скорости вращения двигателя постоянного тока, является изменение магнитного потока машины (изменение тока возбуждения). Экономия связана с тем, что в данном случае управлять можно не большим током якоря, а малым током возбуждения, что уменьшает потери и удешевляет систему управления. Однако этот способ позволяет лишь увеличивать скорость вращения двигателя.
Согласно выражению (1.1), с уменьшением Ф скорость возрастает (рис.5). Двигатели рассчитываются для работы при номинальном режиме с наибольшим значением Ф, т. е. с наименьшей величиной n. При таком регулировании к. п. д. двигателя остается высоким, так как мощность возбуждения мала, и потери при регулировании минимальны. Максимальная скорость вращения в данном случае ограничивается механической прочностью машины и условиями ее коммутации.
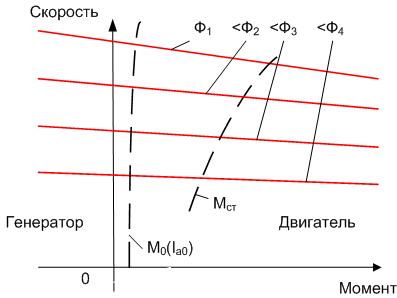
Рис.5 Характеристики ДПТ при регулировании тока возбуждения
Современные способы регулирования скорости двигателей постоянного тока
Сегодня основным средством управления двигателями постоянного тока становятся современные тиристорные регуляторы (назовем их “приводы постоянного тока”), их производят множество фирм, специализирующихся на приводной технике (например, Control Techniques, Siemens, Sprint-Electric и т.д.). Современные приводы постоянного тока позволяют управлять не только скоростью вращения двигателя, но и его моментом (например, на линиях намотки). За счет различных интерфейсов обмена сигналами с автоматизированной системой управления, изменять параметры работы двигателя достаточно просто и удобно.
Приводы постоянного тока могут работать как в одном квадранте, так и во всех четырех, при этом изменяя не только ток обмотки якоря, но и ток обмотки возбуждения — многие приводы имеют встроенные “контроллеры поля”, что дает возможность регулировать скорость двигателя в самом широком диапазоне.
Следует отметить, что “ослабление” поля при задании скорости двигателя выше номинальной, привод производит автоматически, контроллер поля представляет собой тот же тиристорный регулятор. Встроенные контроллеры поля имеют приводы Mentor, Mentor MP (Control Techniques), PL, PLX (Sprint-Electric). Остальные модели приводов постоянного тока этих брендов для питания обмотки возбуждения двигателей имеют неуправляемые выпрямители.
Номинальный ток контроллеров возбуждения приводов постоянного тока имеют следующие значения:
Sprint-Electric PL, PLX — 8A (для приводов с номинальным током якоря 12-123A), 16A (для приводов с номинальным током якоря 155-330A), 32A (для приводов с номинальным током якоря 430-630A).
Control Techniques Mentor — M25(R) — M210(R) — 8 А, остальные габариты с неуправляемым выпрямителем.
Control Techniques Mentor MP —
MP25Ax(R), MP45Ax(R), MP75Ax(R), MP105Ax(R), MP155Ax(R), MP210Ax(R) — 8А
MP350Ax(R), MP420Ax(R), MP550Ax(R), MP700Ax(R), MP825Ax(R), MP900Ax(R) — 10A
MP1200Ax(R), MP1850Ax(R) — 20А.
Для токов обмотки возбуждения имеющих значение свыше 8А, Control Techniques предлагает внешние контроллеры поля, которые связываются с приводом постоянного тока по цифровой шине — это контроллеры FXM-5 (до 90А) и FXMP-25 (до 25А).
На практике часто встречаются двигатели с низковольтными обмотками возбуждения с большими токами. В данном случае, для изменения тока можно применить приводы постоянного тока, при этом вместо обмотки якоря подключить обмотку возбуждения. Это может быть любой аналоговый или цифровой привод постоянного тока. При использовании в качестве регуляторов поля простых аналоговых преобразователей Sprint-Electric (модели 340, 680, 1220, 340i, 680i, 1220i, 370, 370E, 400E, 800E, 1200E, 400, 800, 1200, 400i, 1600i, 3200i, SL, SLE), производитель рекомендует настраивать их в режим управления моментом.
Привод Mentor MP (Control Techniques) имеет для этого специальный режим.







