Электропривод лифта на основе двухскоростного асинхронного двигателя с устройством плавного пуска
Автор: Березняк В.В. Чекавский Г.С.
Источник: Донбасс-2020: перспективы развития глазами молодых ученых / Материалы VI Международной научно-практической конференции тудентов, аспирантов и молодых ученых.   Донецк, ДонНТУ   2014.
Двухскоростные трехфазные асинхронные двигатели (АД) имеют широкое распространение в электроприводе (ЭП) пассажирских и грузовых лифтов, других подъемных механизмов, основной причиной чего является невысокая стоимость ЭП и простота схемы управления.
При неконтролируемом пуске двухскоростного АД вследствие колебаний электромагнитного момента при коммутациях имеют место рывки при переходе между скоростями, что, кроме прочего, вызывает динамические перегрузки в механической части. Поэтому достигаемое качество управления можно считать удовлетворительным, если речь идет об использовании лифтов в жилых домах средней этажности. При использовании двухскоростных АД, тем не менее, существует возможность смягчить динамические перегрузки за счет применения относительно простых и недорогих тиристорных устройств плав-ного пуска (УПП). Это позволяет также предотвратить преждевре-менный выход из строя АД и элементов кинематической цепи лифта, обеспечить возможность управления ЭП с использованием современных средств автоматизации, существенно снизить потребление реактивной мощности, снизить уровень шума и вибрации. При этом следует иметь в виду, что подключение двухскоростных АД к УПП имеет свои особенности, которые и рассматриваются в данной статье.
Цель статьи – анализ существующих схем ЭП лифта на базе двухскоростного АД с использованием УПП, позволяющих обеспе-чить плавность протекания переходных процессов.
Основной материал статьи. Главные требования к ЭП лифтов сводятся к обеспечению заданных (оптимальных) скоростей движения – основной (рабочей) и посадочной, что дает возможность обеспечить плавную и точную остановку. В силу самого назначения лифта его ЭП реверсивный, режим работы – повторно-кратковременный, частота включений в час – 100 – 240 (для пассажирских лифтов), 70 – 100 (для грузовых) при продолжительности включения, равной 15 – 60%.
Несмотря на то, что переходные процессы (при пуске и тормо-жении) имеют незначительную продолжительность (по сравнению с временем цикла), и практически не влияют на производительность лифта, необходимость ограничения ускорения и рывка объективно существует, поскольку обусловлена необходимостью ограничения динамических нагрузок в механической передаче и обеспечением требуемого комфорта для пассажиров (исключить отрицательное влияние на самочувствие пассажиров).
Перечисленным требованиям удовлетворяет применение достаточно простого и надёжного двухскоростного двигателя. При этом, в силу возможности получения низкой скорости, обеспечивается большая скорость движения кабины, чем в лифтах с односкоростными АД.
Один из распространенных видов двухскоростных АД является двигатель с двумя независимыми трехфазными обмотками статора, имеющими различное число пар полюсов. Частота вращения ротора двигателя определяется тем, какая из обмоток подключена к трехфазной сети. При этом переход с низкой скорости на высокую должен производиться после выдержки времени, достаточной для размагничивания двигателя, что позволяет избежать больших бросков тока из-за противофазного состояния между сетью и двигателем. Возможная схема подключения такого двухскоростного двигателя к УПП изображена на рис. 1.
В то же время следует отметить такие недостатки АД с двумя обмотками на статоре:
1) В конкретный момент времени работает только одна из обмоток, вторая при этом бездействует, в связи с этим двигатель имеет не-высокие энергетические показатели;
2) Повышенные массо-габаритные показатели (по сравнению с односкоростным АД той же мощности).
Другой распространенный вид двухскоростного АД – двигатель с одной обмоткой с подключением по схеме Даландера, соединенной внутри таким образом, чтобы обеспечить две схемы включения, в зависимости от произведенных внешних коммутаций (рис.2). Достигаемое при этом соотношение числа пар полюсов составляет 2 : 1, следовательно, двигателя имеет две рабочие скорости с тем же соотношением.

Рисунок 1 – Схема подключения к УПП двухскоростного АД с двумя обмотками на статоре (силовая цепь)

Рисунок 2 – Варианты схем включения обмоток двухскоростного АД.
С точки зрения использования в ЭП лифта двигатель с обмот-кой Даландера выглядит предпочтительней, поскольку лишен недостатков, присущих двигателю с двумя независимыми обмотками.
Схема подключения двухскоростного АД с обмоткой Даландера к УПП показана на рис.3.

Рисунок 3 – Схема подключения двигателя с соединением обмоток по схеме Даландера (силовая цепь)
Для лифтов и подъемников высотных зданий могут использо-ваться специальные двигатели – например, двигатель с обмоткой Даландера и другой независимой обмоткой (три различные скорости) или двигатель с двумя обмотками Даланлера (четыре скорости).
На кафедре «Электропривод и автоматизация промышленных установок» (ЭАПУ) в лаборатории систем управления электроприводами создается стенд для исследования схем плавного пуска на основе устройства ATS48D17Q (17А, 170-460В) серии Altistart-48 производства фирмы Schneider Electric, управляющего пуском двигателя АИР80В4/2У3 мощностью 1,5 кВт/2,2 кВт (380 В, 50 Гц, 1410/2760 об/мин, 3,8А/4,6А), по схеме рис.3. Тиристорное устройство ATS48D17Q (внешний вид показан на рис.4) способно обеспечить плавный пуск и остановку трехфазных АД с короткозамкнутым ротором мощностью от 3 до 15 кВт (в зави-симости от схемы подключения и режима работы), а также имеет ряд встроенных функций, в качестве основных из которых, в контексте рассмотрения ЭП лифта, следует выделить:
- настройка ускорения при разгоне и пускового момента;
- поддержание момента, развиваемого двигателем во время ускоре-ния и замедления (значительное уменьшение ударных нагрузок);
- возможность закорачивания УПП с помощью обходного контак-тора по окончании пуска с поддержанием электронных защит;
- наличие встроенной косвенной тепловой защиты двигателя;
- обработка информации с терморезисторов (позисторов);
- контроль времени пуска;
- защита от недогрузки и перегрузки в установившемся режиме.
- отображение электрических параметров, состояния нагрузки и времени работы;
- последовательный порт RS 485 для подключения к шине Modbus.
Перечень ссылок
1. Устройство плавного пуска Altistart 48. Руководство по эксплуатации. – Schneider Electric.
Вызов
Предположим, пассажир нажимает кнопку вызова на четвертом этаже. Включается реле этажное 4РЭ и замкнувшимся контактом 4РЭ подает напряжение с шинки вызова через нажатую кнопку 4 КнВ на шинку самоблокировки этажных реле 39. Включается реле пуска РП. Далее последовательно срабатывают
ЭмО -> 1ДЗ ->КВ-> M1, ЭмТ.
Контактор КВ замкнул свои блок-контакты:
1) контакт 37—39 подает напряжение на шинку 39, так что 4РЭ и РП включены, хотя пассажир уже отпустил кнопку вызова;
2) другой контакт КВ включает реле 2РВ;
3) разомкнувшийся контакт 2РВ отключает шинку вызова.
Контактом РП выключено реле 1РВ; контактом 1РВ снято напряжение с шинки приказа. Кабина движется вверх.
Останов. Кабина подходит к четвертому этажу. Фигурная отводка переводит рычаг этажного переключателя 4ЭП в среднее положение. Размыкается контакт 4ЭП-П, отключая контактор КВ. Накладывается тормоз, кабина останавливается.
Вслед за контактором отключаются 4РЭ, РП и ЭмО. Якорь магнитной отводки поднимает защелку дверного замка—дверь можно открыть. Теперь контакт 4ДЗ разомкнут, контакты 1, 2, ЗДЗ замкнуты.
Приказ. Пассажир открывает дверь шахты, входит в кабину, закрывает дверь шахты; подвижный пол опускается. Срабатывают РКД и замыкаются подпольные контакты 1ПК, 2ПК. Замыкающий контакт 1ПК включает реле РПК, размыкающий 1ПК снимает напряжение с шинки 37 — пока открыта дверь кабины, пуск лифта невозможен. Пассажир закрывает дверь кабины — блокировочный контакт дверей кабины ДК подает напряжение на шинку 37.
Контакты РПК, 2ПК в цепи шинки вызова разомкнуты, вызвать кабину на другой этаж невозможно.
Контакты РПК, 2ПК в цепи шинки приказа замкнуты, на шинке IIIПр есть напряжение. Пассажир нажимает кнопку 1КнП — включаются 1РЭ, РП и срабатывают

Блок-контакт КН подает напряжение на шинку 39: реле 1РЭ и РП остаются включенными. Останавливает кабину контакт 1ЭП-1, выключая контактор КН.
После останова кабины выключается реле времени 2РВ. Однако его контакт в цепи шинки вызова остается разомкнутым 3—5 с, так что пассажир успевает выйти из кабины. Спустя это время на шинке вызова появляется напряжение; кабину можно вызвать на другой этаж.
Порожнюю кабину можно вызвать на другой этаж с открытой дверью, так как замкнут подпольный контакт 1ПК и он шунтирует разомкнутый контакт ДК. Если же пассажир в кабине, то 1ПК разомкнут, и на шинке 37 не будет напряжения до тех пор, пока пассажир не закроет дверь.
СХЕМА ДИСТАНЦИОННОГО ВКЛЮЧЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ ЛИФТА
Простейшая схема для дистанционного включения асинхронного двигателя дана на рис. 1.9. Две фазы подведены к главным контактам контактора, третья — подключена к двигателю.
Минус от источника постоянного тока подан на один конец катушки контактора, ее другой конец заведен на замыкающий контакт кнопки с самовозвратом. Чтобы не держать кнопку постоянно нажатой, она зашунтирована замыкающим блокировочным контактом. На кнопку
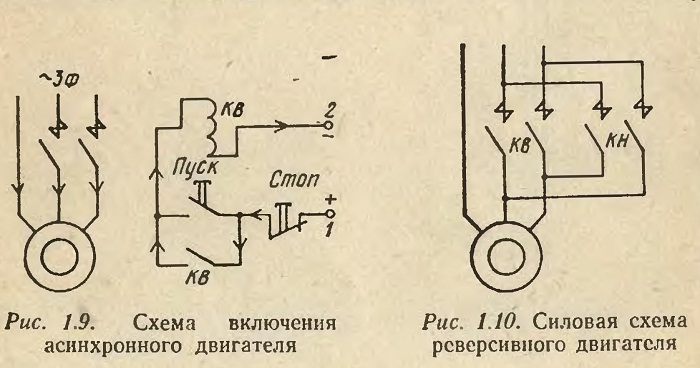
«Стоп» с размыкающим контактом, служащую для остановки двигателя, подается плюс от источника
Работает схема следующим образом. На клеммах 1—2 напряжение постоянное; на всех трех фазах — переменное. Нажимается кнопка «Пуск». Контактор срабатывает и замыкает главные контакты и блокировочные. При отпущенной кнопке двигатель остается включенным, ток на катушку контактора идет через замкнувшийся блокировочный контакт, как показано стрелками на рис. 1.9.
Для выключения двигателя следует нажать на кнопку «Стоп». Якорь контактора отпадет, его контакты — главные и блокировочный — разомкнутся. Двигатель остановится.
На схемах силовую часть (двигатель и главные контакты) и цепь управления (катушка контактора, кнопки, блокировочные контакты) показывают отдельно, в разных местах.
Состояние катушки контактора (включенное либо выключенное) связано с состоянием его контактов (контакты замкнуты либо разомкнуты).
Чтобы изменить направление вращения двигателя (рис. 1.10), т. е. поменять местами две фазы, используются два контактора: контактор «Вверх» КВ и контактор «Вниз» КН. Катушки контакторов подключены к минусу источника (рис. 1.11). Чтобы одновременно не включились оба контактора, предусмотрена электрическая блокировка: в цепи контактора КВ — размыкающий блокировочный контакт КН, в цепи контактора
КН — размыкающий блокировочный контакт КВ. Кнопки «Вверх» или «Вниз» зашунтированы замыкающими блок-контактами своих контакторов. Для отключения использована общая кнопка «Стоп».
Предположим, нажали кнопку «Вверх», включив напряжение на катушку контактора КВ. Контактор сработал: замкнулись его главные контакты в цепи двигателя (рис. 1.10) и блокировочный КВ, шунтирующий кнопку «Вверх» (рис. 1.11). Отпустили кнопку — катушка КВ осталась включенной. На схеме рис. 1.12 стрелками
отмечен путь тока через катушку при включенном состоянии контактора КВ. Контактор КН включить невозможно, так как в цепи его катушки размыкающий блокировочный контакт КВ разомкнут.
Схема управления электродвигателем лифта отличается от схемы реверсивного двигателя (рис. 1.11) тем, что в ней кнопками включают катушки этажных реле, а последние своими контактами замыкают цепь контакторов «Вверх» или «Вниз».
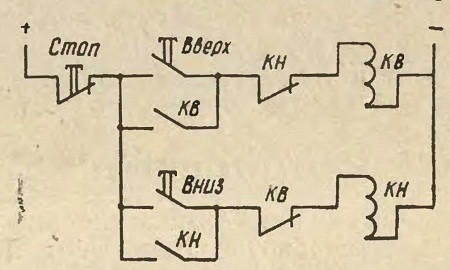
Рис. 1.11. Схема управления реверсивным двигателем
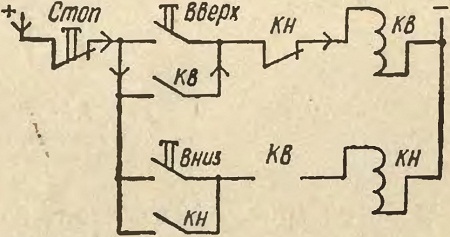
Рис. 112. Путь тока при включенном контакторе КВ
Схемы управления электроприводами лифтов
 В зависимости от быстроходности пассажирских лифтов приняты следующие разновидности силовых схем управления ими:
В зависимости от быстроходности пассажирских лифтов приняты следующие разновидности силовых схем управления ими:
тихоходные лифты имеют двигатели с короткозамкнутым или с фазным ротором и кнопочное или рычажное управление,
быстроходные лифты — двух или односкоростные двигатели, управляемые магнитными станциями или тиристорными станциями управления (ТСУ-Р) с кнопочными командоаппаратами,
скоростные и высокоскоростные лифты — двигатели постоянного тока, управляемые по системе «генератор — двигатель» с различными схемами возбуждения или по системе «тиристорный преобразователь — двигатель» с кнопочными командоаппаратами,
могут использоваться также схемы асинхронно-вентильных каскадов (АВК), применение которых позволяет увеличить к.п.д. установки.
Пассажирские лифты в зависимости от пассажиропотока, высоты подъема и количества лифтов, обслуживающих пассажиров, разделяются на одиночные и с групповым управлением.
К одиночным относятся:
а) лифты, работающие по единичным приказам и вызовам без попутных остановок при спуске и подъеме пассажиров,
б) лифты с собиранием пассажиров при спуске, но с запрещением вызовов при подъеме,
в) то же, но с регистрацией вызовов на спуске с последующим их исполнением.
К лифтам с групповым управлением относятся:
а) лифты с одной вызывной кнопкой на посадочных площадках независимо от количества установленных лифтов (чаще используется парное управление) и с собиранием пассажиров при спуске,
б) то же, но с полным собиранием пассажиров на промежуточных этажах на подъем и спуск (обычно устанавливаются в административных, учебных и других зданиях).
Кроме того, очень часто используется диспетчеризация лифтов ряда домов и целых районов, когда с одного диспетчерского пульта осуществляется контроль состояния схем и производится управление несколькими лифтами.
Независимо от быстроходности лифтов, одиночного или группового управления ими необходимыми элементами большинства их схем являются следующие:
кнопки с самовозвратом, залипающие или западающие кнопки для вызова кабин и подачи приказа из кабины,
различные датчики селекции и точной остановки — позиционно согласующие устройства для регистрации места нахождения кабины и состояния электрических цепей,
датчики и блокировки состояния подъемных канатов, состояния дверей шахты и кабины (открыты или закрыты),
конечные выключатели ограничения скорости и степени загрузки кабины,
указатели направления движения кабины и в некоторых лифтах наличия груза в кабине.
Из названных элементов более подробно остановимся на позиционно-согласующих устройствах (ПСУ), которые определяют место, где должна остановиться кабина в шахте при появлении вызова или приказа, и движение ее вверх или вниз. Остальные же элементы обычно представляют собой различные модификации конечных выключателей, известных из других курсов.
Конструктивно позиционно-согласующие устройства выполняют в виде набора трехпозиционных электромеханических или индуктивных либо магнитных (герконовых) датчиков, размещенных в шахтах, с выводом сигналов на релейный или бесконтактный селектор в машинное помещение (ПСУ иногда выполняются в виде центральных этажных аппаратов, размещаемых в машинном помещении).
Датчики, размещаемые в шахте, взаимодействуют с установленными на кабине отводками (при электромеханических) или магнитными шунтами (при индуктивных или герконовых датчиках) и выдают сигналы в центральный этажный аппарат (шаговый копираппарат или релейный селектор), установленный в машинном помещении, а последний передает и схему управления сигнал на исполнение полученной команды.
Датчики сигналов о движении кабины вверх или вниз целесообразнее размещать на кабине (требуется меньше проводов), а магнитные шунты устанавливать в шахтах в требуемых точках. В этом случае при цифровом управлении число столбцов устанавливаемых шунтов по шахте равно числу разрядов передаваемого номера этажа в двоичном или ином коде.
Трехпозиционные электромеханические переключатели фигурной отводкой переводятся в одно из положений, соответствующее движению кабины вверх или вниз, либо ее остановке. В этом случае при движении кабины контакты переключателей пройденных этажей включаются в одно из крайних положений, подготавливая к действию цепи вызовов и приказов, а при остановке кабины переключатель переводится в среднее положение, отключая цепь управления от контакторов направления и исключая тем самым уход кабины с этажа при ошибочном нажатии кнопки приказа или вызова.
Для обеспечения относительно точной остановки кабины лифта в схемах управления ими в последнее время стали применять бесконтактные индуктивные или контактные герметизированные магнитоуправляемые (герконовые) датчики. Эти датчики устанавливают как в шахте, так и на кабине: в шахте — датчики селекции (замедления), а на кабине — датчик точной остановки. Для взаимодействия с датчиками на кабине размещают ферромагнитный шунт селекции, а в шахте (на каждом этаже) — ферромагнитные шунты точной остановки.
Индуктивные датчики состоят из разомкнутого П-образного магнитопровода с катушкой, заключенной в кожух. Последовательно с ней включается катушка исполнительного реле, и на них подается напряжение переменного тока (U).
При разомкнутом магнитопроводе магнитный поток, пересекающий катушку, мал. Поэтому э.д.с. и ток самоиндукции в проводниках катушки, а также обусловленное им индуктивное сопротивление (X) практически отсутствуют, так что сопротивление катушки носит активный характер (R). Ток в последовательно включенных катушках относительно большой, он как бы имитирует замыкание контактов в контактной системе (реле включается).
При замыкании шунтом П-образного магнитопровода магнитный поток, пересекающий его катушку, возрастает, в связи с чем увеличиваются э.д.с. самоиндукции, а также обусловленное им индуктивное сопротивление катушки. Вследствие этого ток в последовательно включенные катушках уменьшается, имитируя размыкание цепи в контактной системе (исполнительное реле отключается).
Герконовый датчик представляет собой П-образный корпус, в котором размещены с одной стороны от паза две герметизированные стеклянные колбы с вакуумом внутри и укрепленными на пружинящих пластинах контактами, подключенными к соответствующим цепям управления лифтом. С другой стороны от паза находится постоянный магнит. Рабочим элементом таких датчиков является ферромагнитный шунт, который проходит через П-образный разрез при движении кабины лифта.
Принцип работы этих датчиков следующий: пружинящие силы пластин контактов герконов направлены так, что если на них поле постоянного магнита не действует, то нормально разомкнутые контакты разомкнуты, а нормально замкнутые — замкнуты, т. е. цепи, к которым подключены эти контакты, будут разомкнуты или замкнуты.
Такое состояние геркона будет тогда, когда ферромагнитный шунт находится в пазе П-образного корпуса, поскольку магнитные силовые линии постоянного магнита замыкаются через шунт. После того как шунт выйдет из паза, магнитные силовые линии замыкаются через пластины, преодолевая их пружинящее действие, и контакты геркона, а следовательно, цепи к которым они подключены, переходят в противоположное состояние.

В качестве примера, отражающего основные особенности схем управления лифтами, рассмотрим схему управления одиночным лифтом без попутных остановок, показанную на рис. 1. Лифт обслуживает четыре этажа, в качестве исполнительного двигателя здесь использован двухскоростной асинхронный двигатель М.
Включение на малую (Мл) или большую (Б) частоту вращения двигателя производится соответствующими контакторами Мл и Б. Направление вращения двигателя определяется контакторами В и Н, замедление — дополнительным резистором Р, торможение — электромагнитным тормозом ЭТ.
В качестве этажных переключателей использованы бесконтактные индуктивные датчики (ДТС, ДТОВ и ДТОН), включенные последовательно с катушками реле (РИС, РИТОВ, РИТОН). Датчики ДТС служат для включения привода лифта на высокую частоту вращения и подачи импульса на его замедление, а датчики ДТОВ и ДТОН предусмотрены для точной остановки лиф га на уровне пола соответствующего этажа и размещены на кабине, магнитные шунты для них устанавливаются в стволе шахты.
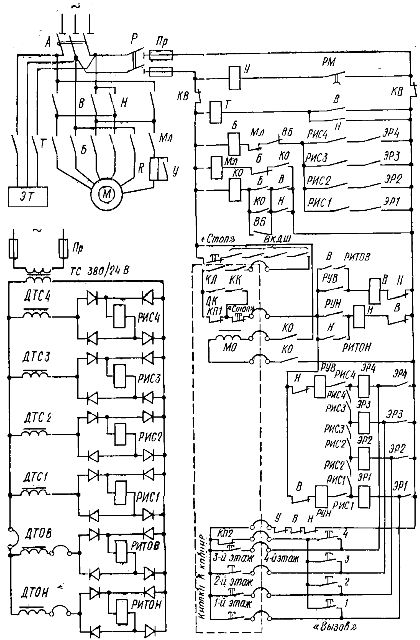
Рис. 1. Принципиальная схема управления одиночным лифтом
Назначение остальных элементов схемы и ее работу рассмотрим на примере перемещения кабины с пассажиром с 1-го на 3-й этаж, полагая при этом, что автомат А, разъединитель Р и конечные выключатели KB, ограничивающие ход кабины вверх и вниз в аварийных режимах, замкнуты, а кабина находится на первом этаже. В этом случае катушки реле РИС, кроме реле первого этажа, обтекаются номинальным током.
При нажатии кнопки «3-й этаж» образуется следующая электрическая цепь: фаза сети — полюс разъединителя Р — предохранитель Пр — конечный включатель KB — кнопка «Стоп» — блокировки дверей шахты Дв1 — Дв4 — контакты натяжения каната КК — конечный выключатель ловителя КЛ — дверные выключатели кабины ДК — контакты кнопки «Стоп» — размыкающий блок-контакт Н — катушка реле РУВ — замыкающие контакты реле РИС4 и РИСЗ (катушки этих реле обтекаются током) — катушка этажного реле ЭРЗ — кнопка «3-й этаж» — размыкающие блок-контакты контакторов У, В, Н — конечный выключатель KB — предохранитель Пр — полюс разъединителя Р — фаза сети.
После срабатывания реле РУВ и ЭР3 включаются контактор движения вперед В, контактор быстрого движения Б (по цепи катушки Б — блок-контакт Мл — выключатель большой частоты вращения ВБ — контакты реле РИСЗ и ЭР3). При замыкании контактов В и Б двигатель подключается к сети, включаются контактор Т, растормаживающий канатоведущий шкив, и контактор отводки КО, включающий электромагнит отводки МО и подготавливающий к включению цепь катушки контактора малой частоты вращения Мл. Огводка втягивается, освобождая рычаг замка, и кабина приходит в движение.
При подходе кабины к третьему этажу ферромагнитный шунт замыкает катушку датчика ДТСЗ, ее сопротивление увеличивается и реле РИСЗ отпадает, отключая реле ЭР3 и РУВ. В результате этого контактор Б отпадает, замыкая свой контакт, включает контактор малой частоты вращения Мл, а контактор В остается включенным, так как при движении кабины еще не замкнута магнитная цепь датчика точной остановки вверх, поэтому и контакт РИТОВ еще не разомкнут. Двигатель тормозится до малой частоты вращения, работая в генераторном режиме с введенным в одну фазу статора резистором R. Выдержка времени торможения задается маятниковым реле РМ, работающим при включении контактора Мл.
Как только пол кабины выравняется с полом этажного перекрытия, магнитный шунт замыкает магнитную цепь катушки датчика точной остановки ДТОВ, реле РИТОВ отпадает и происходит отключение контакторов В, затем КО и, наконец, Мл. В результате двигатель и тормозной электромагнит отключаются от сети, накладывается механический тормоз и кабина останавливается.
Для того чтобы подучить собирательную схему управления лифтом с попутными остановками только при опускании кабины или полностью собирательную схему, т. е. при попутных остановках во время движения кабины вверх и вниз, необходимо в схему, подобную рассмотренной на рис. 1, ввести некоторые дополнения. Например, в схеме, с двухскоростными двигателем индуктивные датчики ИД, реле РИС и кнопки вызова и приказа на каждом этаже включаются так, как показано на рис. 2.
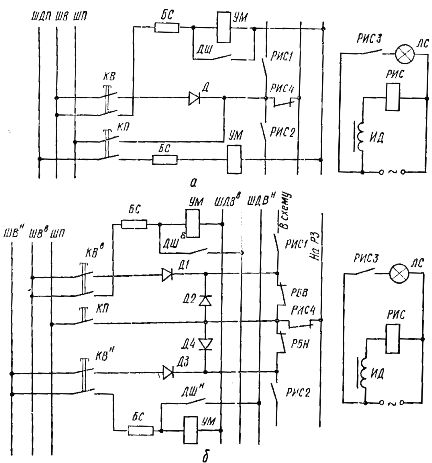
Рис. 2. Фрагменты дополнений к собирательным схемам управления лифтом (дли одного этажа)
В схеме с попутными остановками при опускании кабины (рис, 2, а) вызовы и приказы подаются раздельными залипающими кнопками и поэтому могут регистрироваться в любое время, а передаваться в схему сразу же, кроме периоде движения кабины с пассажирами вверх, когда шина питания контактов передачи вызовов в исполнительную схему отключается избирательными контактами от плюсовой шины.
В полной избирательней схеме управления (рис. 2, б) дополнительно имеются вызывные цепи для подъема (ШДВв) и опускания (ШДВн) кабины, контакты блокировочных реле направления РБВ и РБН соединены с контактами избирательной секционированной цепочки исполнительной схемы.
В схемах, изображенных на рис. 1 и 2, при отсутствии кабины на этаже катушки индуктивного датчика ИД и реле РИС возбуждены. Поэтому при нажатии кнопки приказа КП или вызова КВ (они удерживаются во включенном состоянии удерживающими магнитами УМ до тех пор, пока их не зашунтируют контакты дверей шахты данного этажа ДШ) образуется цепь (на рисунках не показана), включающая в себя реле управления вверх РУВ, если этаж назначения выше этажа стоянки кабины, или реле управления вниз РУН, если этаж назначения ниже стоянки кабины.
После прибытия кабины на этаж вызова обесточивается индуктивный датчик ИД, отключается реле РИС, размыкая свои контакты, которые отключают реле РУВ или РУН и лампу ЛС (кабина останавливается), а замыканием контакта РИС4 подготавливается цепь для выполнения приказа, поступающего из кабины.
В полной собирательной схеме секционированная контактами РИС1 н РИС2 цепочка на этаже стоянки кабины разрывается не только этими контактами, но еще и контактами реле блокировки вверх РБВ или вниз РБН (катушки их на схеме не показаны), а вызывные цепи подъема, спуска и цепи приказов отделяются друг от друга разделительными диодами Д1 — Д4.
Перед нажатием кнопки вызова или приказа, если направление движения кабины еще не выбрано, все контакты в цепочке выбора направления замкнуты, кроме контактов РИС4 на этаже стоянки кабины. Поэтому при нажатии одного из этих кнопок сигналы вызовов с этажей, расположенных выше этажа стоянки кабины, подключаются к катушке реле РУН, а сигналы вызовов с этажей ниже стоянки кабины включают реле РУВ. После выбора направления одновременно с реле РУВ или РУН включается одно из реле блокировки противоположного направления РБВ или РБН, разрывающее своими контактами выход через секционную цепочку сигналов вызова непопутного направления.
В схеме, показанной па рис. 2, а, для опускания пассажиров кабина без остановок проходит до наиболее высокого этажа вызова и затем опускается с попутными остановками, а в схеме, изображенной на рис. 2, б, при необходимости подъема пассажиров кабина проходит до наиболее низкого этажа вызова, после чего поднимается с попутными остановками.
В рассмотренных схемах селекторы выполнены на релейных элементах. Наряду с этим применяются и другие селекторы: кулачковые, фотоэлектрические, щеточные непрерывного слежения, шаговые, на статических элементах и т. д.
При больших пассажиропотоках в одном холле устанавливают несколько лифтов, которые для повышения комфортабельности и улучшения электроэнергетических показателей имеют объединенное парное или групповое управление. Количество лифтов, соединенных в группы, обычно не превышает четырех, а чаще трех, хотя известны системы, содержащие в группе до восьми лифтов.
При групповом управлении обычно различают три основных режима работы лифтов: пик подъема, пик спуска и уравновешенное движение в обоих направлениях. Включение лифтов на тот или иной режим осуществляется диспетчером или автоматически посредством программирующих часов, устанавливаемых на каждую группу лифтов.
В высотных зданиях каждая группа лифтов закрепляется для обслуживания определенной зоны этажей, другие этажи ею не обслуживаются. При наличии нескольких лифтов в группе, обслуживающих одну зону или невысокое здание, в целях повышения средней скорости движения путем сокращения числа остановок отдельные лифты могут выделяться для обслуживания четных и нечетных этажей.
Для осуществления парного или группового управления лифтами схемы управления ими должны быть собирательными, а вызовы каждого этажа в обоих направлениях должны регистрироваться раздельно в каждом направлении соответствующими запоминающими устройствами, содержащими реле, транзисторы и т. д.
В качестве примера, отражающего специфику работы при парном управлении лифтами с дополнительными реле стоянки первого лифта 1PC и второго лифта 2РС, рассмотрим фрагмент принципиальной схемы, показанный на рис. 3.
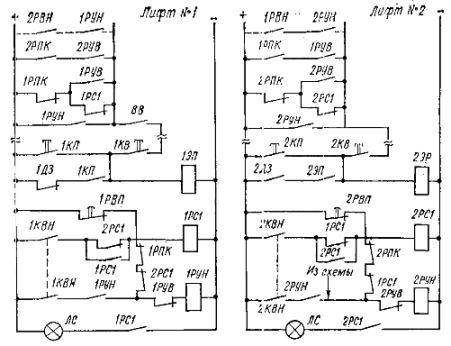
Рис. 3. Фрагмент принципиальной схемы парного управления лифтами: ЭР — этажное реле, РПК — реле переключения каналов, РВП реле автоматического пуска
В этом случае кабина, опустившаяся с пассажирами на первый этаж, не отвечает на вызовы с других этажей и ожидает пассажиров. Если же кабины на первом этаже нет, то поднявшаяся по приказу и освободившаяся кабина автоматически направляется на первый этаж, а при спуске другой кабины или ее стоянке последняя остается на этаже окончания рейса либо направляется к центру нагрузки и используется для работы по вызовам в основном в направлении опускания.
Реле стоянки кабины на первом этаже 1РС1 или 2РС1 включается после прибытия кабины на первый этаж от конечного выключателя 1КВН или 2КВН (устанавливаются в шахтах на копираппарате). Эти реле взаимно сблокированы. Поэтому включение одного из них указывает на то, что данная кабина прибыла на первый этаж раньше другой. В этом случае реле 1РС1 или 2РС1 своим замыкающим контактом включает сигнальную лампу ЛС, а размыкающим — разрывает вызывную цепь своего лифта, отключая вызов на время стоянки кабины на первом этаже.
При уходе кабины с первого этажа ее сигнальная лампа ЛС гаснет, питание вызываемых цепей этого лифта после освобождения кабины сразу же восстанавливается, а после прихода кабины другого лифта на первый этаж включается ее реле PC. Эта кабина остается стоять на первом этаже в ожидании пассажиров (о чем сигнализирует зажиганием ее сигнальная лампа ЛС). При освобождении поднявшейся по приказу кабины и отсутствии вызовов в схему подается сигнал, включающий размыкающими контактами конечного выключателя 1КВН или 2КВН реле 1РУН или 2РУВ катушки реле 1РУН или 2РУВ, и кабина направляется на первый этаж и т. д.
Аппаратура управления двигателями типовых лифтов при одиночном, парном и групповом управлениях обычно располагается на типовых панелях, станциях или блоках управления, устанавливаемых в машинных помещениях.







