3-ФАЗНЫЙ ИНВЕРТОР ОТ 220 В
Представляем довольно простую конструкцию небольшого инвертора для трехфазного двигателя, мощностью около 400 Вт. Инвертор питается от одной фазы переменного напряжения стандартных 220 В. На выходе выдается трехфазное напряжение 3x 220 В.
Схема трёхфазного инвертора
Тут основной элемент управления — FNA41560, который на Али стоит всего около 150 рублей. Правда стоимость остальных элементов гораздо больше. Самые дорогие компоненты — конденсаторы и дроссель. Ну да хватит о деньгах, перейдём к самой схеме 3-фазного преобразователя питания. На входе инвертора имеется схема коррекции коэффициента мощности, которая гарантирует что ток, потребляемый из сети, не искажается и находится в фазе с напряжением.
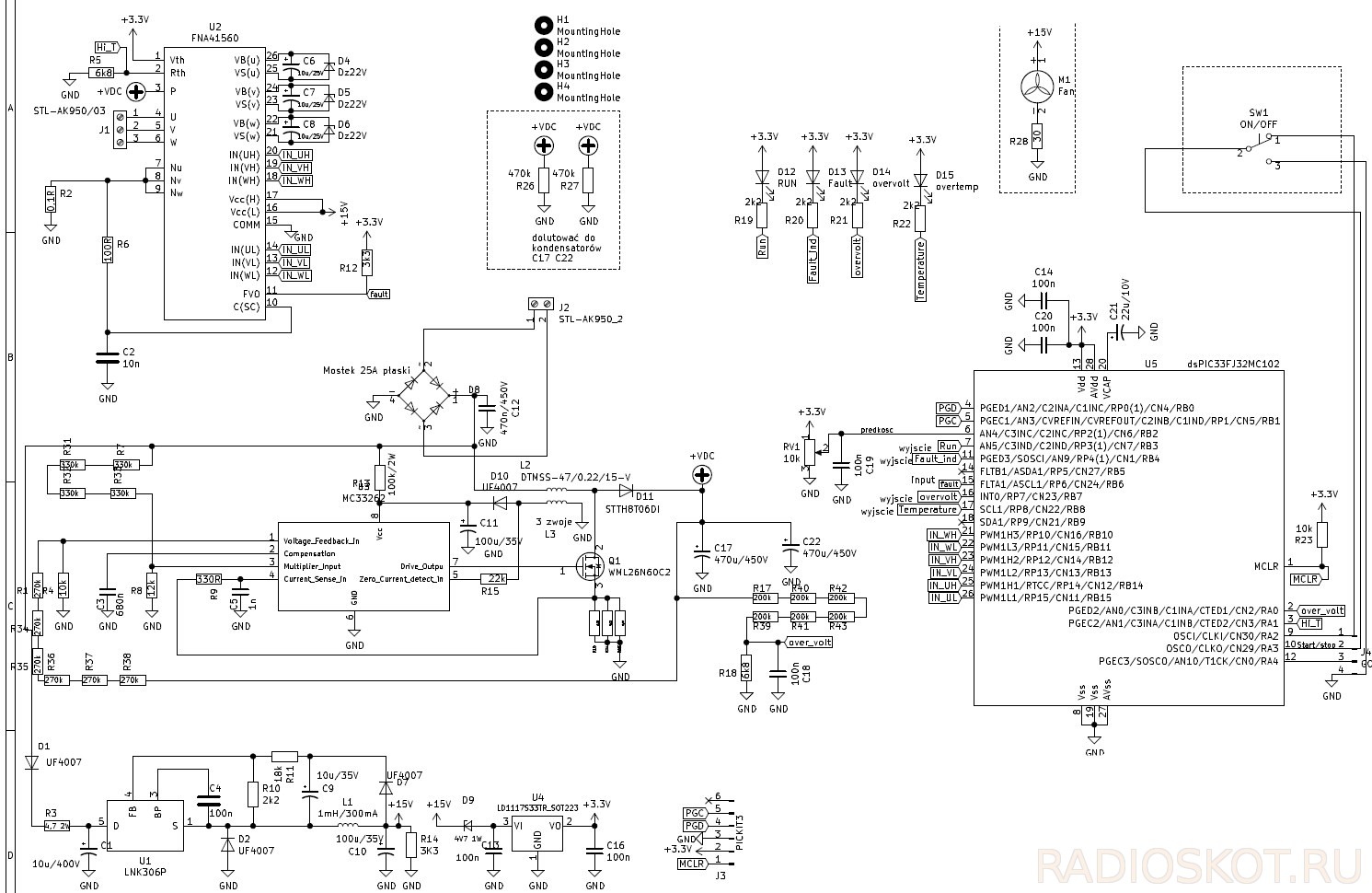
Напряжение на конденсаторах фильтра составляет приблизительно 430 В без нагрузки и падает до 400 В при нагрузке. В инверторе транзисторы переключаются с частотой 5 кГц, потому что для этой частоты и оптимизирован чип FNA41560, дедтайм для транзисторов составляет около 1,2 мкс (см. осциллограммы).

Инвертор имеет защиту от высокой температуры (свыше 105 С), короткого замыкания (от 5 А), высокого напряжения на конденсаторах фильтра (460 В). Защита от короткого замыкания автоматически сбрасывается в конце каждого цикла ШИМ (действует как ограничение тока). Это можно изменить в регистре микроконтроллера PIC33FJ32MC102 P1FLTACON на режим удержания. В режиме этом генераторы ШИМ отключаются и останавливаются до удаления проблемы. Частота регулируется многооборотным потенциометром, с разрешением 0,1 Гц. Регулируемый частотный диапазон от 1 Гц до 80 Гц. Полезный диапазон начинается с 5 Гц. Для генерации выходного сигнала использовался алгоритм VSM-пространственной векторной модуляции (как звучит-то!), который позволяет максимально использовать напряжение постоянного тока, подаваемое на модуль FNA41560.

Различия в формах сигналов, генерируемых с помощью SPWM и SVM, следующие. В случае SPWM максимальное межфазное напряжение на выходе инвертора может быть не более v3 / 2 x Udc, для SVM равно Udc — если не учитывать потери в транзисторах. Фактически, метод SVM дает примерно на 15% более высокое выходное напряжение по сравнению с методом синусоидальной ШИМ.
Следует помнить, что источник питания схемы не изолирован от сети, и при использовании следует соблюдать особые меры предосторожности. Отсутствие гальванической развязки потенциально опасно для жизни.
Сборку устройства предлагается начать с пайки, а затем запуска PFC-части, припаять интегральную микросхему MC33262, выпрямительный мост, диод D11, транзистор Q1 и дроссель, фильтрующие конденсаторы C17 и C22, к которым нужно припаять резисторы 470 кОм. Обмотка (3 катушки) должна быть намотана на дроссель, который будет питать микросхему MC33262. Для намотки использовался кабель от компьютерной сети. Конец и начало обмоток важны в плане полярности и должны быть подключены, как указано в инструкции по применению.

Питание инвертора следует подавать через термисторы, чтобы ограничить ток, протекающий через диод D11, или использовать другое решение, ограничивающее пусковой ток. В данном случае применено 2 термистора NTC6D-15 с максимальным током 5 А. Прямое подключение к сети может повредить диод D11. После пайки элементов схемы PFC, припаяны две последовательно включенные лампы накаливания 100W / 220V к конденсаторам, таким образом проверяем, работает ли PFC блок. Напряжение на лампочках должно быть 400 В.
Следующим шагом была пайка и проверка работы бестрансформаторного блока питания, построенного на микросхеме LNK306. На выходе его следует замерить напряжение, которое должно быть 15 В. В конце спаять FNA41560 и микроконтроллер, который должен быть запрограммирован в схеме. Разъем Pickit3, совместимый с J3, как раз и используется для программирования.

Для запуска схемы, помимо естественно включения питания, необходимо подать логическую единицу с выхода RA2 на вход RA3, после чего инвертор запускается до скорости, установленной потенциометром. Подключение RA3 к земле вызывает остановку инвертора — отключение транзисторов.
Важно управлять запуском или остановкой инвертора с выхода RA2 (контакт 1 на J4, как показано на схеме), потому что в случае слишком высокой температуры или других помех состояние R2 меняется на низкое, и инвертор выключается.
Обращает на себя внимание выход FVO (контакт 11) микросхемы FNA41560, который закорочен на массу, когда напряжение питания меньше 12 В, а также когда схема не запитана. Об этом свидетельствует светодиод, во время запуска и начальных тестов, когда источник питания от программатора pickit3 подключен к плате нужно помнить, что когда этот светодиод горит, на выходе микроконтроллера не генерируются сигналы ШИМ.

Чтобы избавиться от этой ошибки и получить сигналы ШИМ на выходе микроконтроллера, временно отключите питание от программатора и подключите 15 В к FNA41560. Конечно, выполняем эти действия только тогда, когда инвертор отключен от сети. Максимальное выходное напряжение инвертора получается при частоте 60 Гц. Для низких частот напряжение от 1 Гц до 5 Гц является постоянным. Выше 5 Гц U / f = константа увеличивается.

Схема была собрана на печатной плате размером 100 x 100 мм. Программа управления написана на C в среде MPLABX.
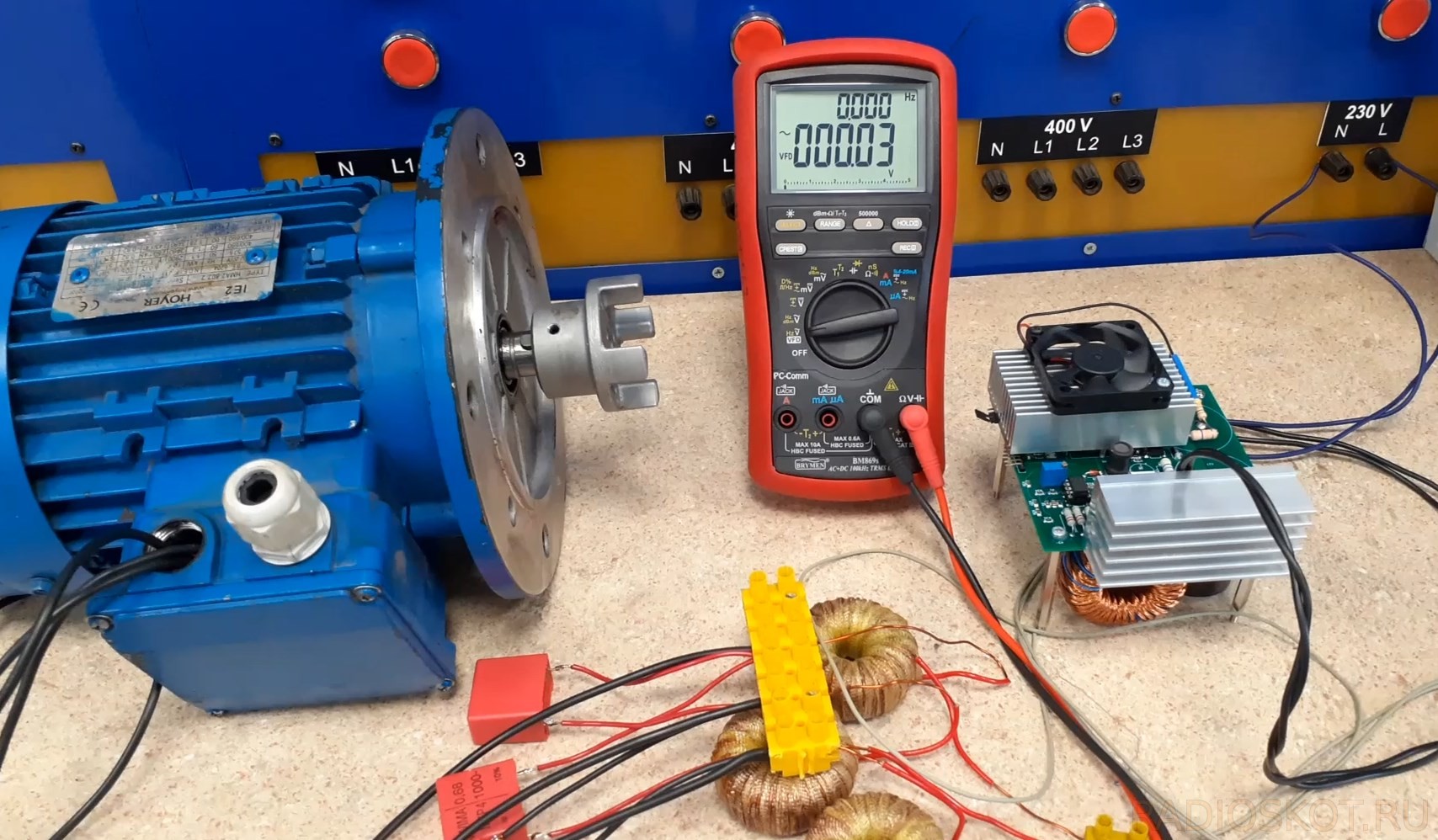
На фото видно,что между инвертором и двигателем включен LC-фильтр 3x L = 1,5 мГн и 3x C = 0,68 мкФ, что смягчает работу.
В заключение хотелось бы добавить, что помимо пусковых термисторов инвертор должен питаться от помехозащитного фильтра. Схема принципиальная 3-х фазного инвертора, программное обеспечение и рисунок печатной платы находятся в приложении. Оригинал
Схема трехфазного асинхронного двигателя инвертор
Простой преобразователь частоты для асинхронного электродвигателя.
Автор: Сергей М.
Опубликовано 11.12.2012
Создано при помощи КотоРед.
Первым был ресторан – зимой холодный воздух должен строго дозировано дуть на разгорячённых посетителей, а летом наоборот –замерзших от холодного мороженого плавно согревать жарким воздухом с улицы. Без инвертора никак не обойтись.
Второй хочет стричь лохматых овец , но вот беда машинка трехфазная. А в поле только одна да и та не 220в. Опять нужен инвертор.
Третий вообще наждачный камень , сверлильный станок и намоточный –захотел прицепить к двигателю.
В конце концов оглядевшись по сторонам я увидел – все…все делают инверторы японцы, французы, немцы …. , только я ещё не имею своего точила для отверток. И мало того все приличные фирмы уже написали , как это делать.
Итак коль уж асинхронный двигатель так распространён и трехфазная система напряжения созданная М. О. Доливо-Добровольским так удобна. А современная элементная база так хороша. То сделать преобразователь частоты –это лишь вопрос личного желания и некоторых финансовых возможностей. Возможно кто то скажет « Ну, зачем мне инвертор , я поставлю фазосдвигающий конденсатор и все решено» . Но при этом обороты не покрутишь и в мощности потеряешь и потом это не интересно.
Возьмём за основу – в быту есть однофазная сеть 220в, народный размер двигателя до 1 кВт. Значить соединяем обмотки двигателя треугольником. Дальше –проще, понадобится драйвер трехфазного моста IR2135(IR2133) выбираем такой потому, что он применяется в промышленной технике имеет вывод SD и удобное расположение выводов. Подойдёт и IR2132 , но у неё dead time больше и выхода SD нет. В качестве генератора PWM выберем микроконтроллер AT90SPWM3B — доступен, всем понятен, имеет массу возможностей и недорого стоит, есть простой программатор -https://real.kiev.ua/avreal/. Силовые транзисторы 6 штук IRG4BC30W выберем с некоторым запасом по току — пусковые токи АД могут превышать номинальные в 5-6 раз. И пока не ставим «тормозной» ключ и резистор, будем тормозить и намагничивать перед пуском ротор постоянным током, но об этом позже . Весь процесс работы отображается на 2-х строчном ЖКИ индикаторе. Для управления достаточно 6 кнопок (частота +, частота -, пуск, стоп, реверс, меню).
Получилась вот такая схема. 
Я вовсе не претендую на законченность конструкции и предлагаю брать данную конструкцию за некую основу для энтузиастов домашнего электропривода. Приведённые здесь платы были сделаны под имеющиеся в моём распоряжении детали.
Конструктивно инвертор выполнен на двух платах – силовая часть ( блок питания , драйвер и транзисторы моста , силовые клеммы) и цифровая часть (микроконтроллер + индикатор ). Электрически платы соединены гибким шлейфом. Такая конструкция выбрана для перехода в будущем на контроллер TMS320 или STM32 или STM8.
Блок питания собран по классической схеме и в комментариях не нуждается. Микросхема IL300 линейная опто развязка для управления током 4-20Ма. Оптроны ОС2-4 просто дублируют кнопки «старт, стоп, реверс» для гальванически развязанного управления. Выход оптрона ОС-1 «функция пользователя» (сигнализация и пр.)
Силовые транзисторы и диодный мост закреплены на общий радиатор. Шунт 4 витка манганинового провода диаметром 0.5мм на оправке 3 мм.
Сразу замечу некоторые узлы и элементы вовсе не обязательны. Для того что бы просто крутить двигатель , не нужно внешнее управление током 4-20 Ма. Нет необходимости в трансформаторе тока, для оценочного измерения подойдёт и токовый шунт. Не нужна внешняя сигнализация. При мощности двигателя 400 Вт и площади радиатора 100см 2 нет нужды в термодатчике.
ВАЖНО! – имеющиеся на плате кнопки управления изолированы от сети питания только пластмассовыми толкателями. Для безопасного управления необходимо использовать опторазвязку.
Возможные изменения в схеме в зависимости от микропрограммы.
Усилитель DA-1 можно подключать к трансформатору тока или к шунту. Усилитель DA-1-2 может быть использован для измерения напряжения сети или для измерения сопротивления терморезистора если не используется термодатчик PD-1.
В случае длинных соединительных проводов необходимо на каждый провод хотя бы надеть помехоподавляющие кольцо. Имеют место помехи. Так например –пока я этого не сделал у меня «мышь» зависала.
Так же считаю важным отметить проверку надёжности изоляции АД –т.к. при коммутации силовых транзисторов выбросы напряжение на обмотках могут достигать значений 1,3 Uпит.
Общий вид. 
Немного про управление.
Начитавшись книжек с длинными формулами в основном описывающих как делать синусоиду при помощи PWM. И как стабилизировать скорость вращения вала двигателя посредством таходатчика и ПИД регулятора. Я пришёл к выводу –АД имеет достаточно жёсткую характеристику во всём диапазоне допустимых нагрузок на валу.
Поэтому для личных нужд вполне подойдет управление описанное законом Костенко М.П. или как его ещё называют скаляроное. Достаточное для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40. Т.е. грубо говоря мы в самом простом случае делаем обычную 3-х фазную розетку с переменной частотой и напряжением меняющимися в прямой зависимости. С небольшими «но» на начальных участках характеристики необходимо выполнять IR компенсацию т.е. на малых частотах нужно фиксированное напряжение . Втрое «но» в питающие двигатель напряжение замешать 3 гармонику. Всё остальное сделают за нас физические принципы АД. Более подробно про это можно прочесть в документе AVR494.PDF
Основываясь на моих личных наблюдениях и скромном опыте именно эти методы без особых изысков чаще всего применяются в приводах мощностью до 15 кВт.
Далее не буду углубляться в теорию и описание мат моделей АД. Это и без меня достаточно хорошо изложили профессора ещё в 60-х.
Но ни в коем случае не стоит недооценивать сложности управления АД. Все мои упрощения оправданны только некоммерческим применением инвертора.
Плата силовых элементов. 
В программе V-1.0 для AT90SPWM3B реализовано
1- Частотное управление АД .Форма напряжения синусоида с 3 гармоникой.
2- Частота задания 5 Гц -50 Гц с шагом 1 Гц. Частота ШИМ 4 кГц.
3- Фиксированное время разгона –торможения
4- Реверс (только через кнопку СТОП)
5- Разгон до заданной частоты с шагом 1 Гц
6 – Индикация показаний канала АЦП 6 (разрядность 8 бит., оконный фильтр апертура 4 бита)
я использую этот канал для замера тока шунта.
7 – Индикация режима работы START,STOP,RUN,RAMP, и Частота в Гц.
8- Обработка сигнала авария от мс IR2135
Торможение двигателя принудительное – без выбега. При этом нужно помнить – если на валу будет висеть огромный вентилятор или маховик то напряжение на звене постоянного тока может достичь опасных значений. Но я думаю вертолёты с приводом от АД строить никто не будет
Функции микропрограммы в будущих версиях
1 -намагничивание ротора перед пуском
2- торможение постоянным током
3 –прямой реверс
4 – частота задания 1 -400 Гц.
5 – ограничение, контроль тока двигателя.
6 — переключаемые зависимости U/F
7 – контроль звена постоянного тока.
8 – некоторые макросы управления –это вообще в далёких планах.
Испытания.
Данная конструкции была проверена с двигателем 0.18кВт и 0.4 кВт и 0.8 кВт. Все двигатели остались довольны.
Только при малых оборотах и долговременной работе необходимо принудительное охлаждение АД.
Строка для программатора
av_28r4.exe -aft2232 -az +90pwm3b -e -w -v -fckdiv=1,psc2rb=0,psc1rb=0,psc0rb=0,pscrv=0,bodlevel=5 -c01.hex
Автономный 3-фазный инвертор напряжения
В статье описывается инвертор напряжения для питания трехфазного электродвигателя. Инвертор осуществляет ручное скалярное управление работой электродвигателя.
В современном частотно-регулируемом электроприводе можно выделить три основные составляющие:
1. Преобразователь электроэнергии (выпрямитель-инвертор).
2. Система управления.
3. Асинхронный электродвигатель.
Преимущественно в частотно-регулируемых приводах применяется простая схема, состоящая из неуправляемого выпрямителя и независимого инвертора напряжения.
В регулируемых электроприводах переменного тока используются три основные структуры системы автоматического регулирования:
1. Реализация заданной статической зависимости между частотой и действующим значением напряжения U, питающего электродвигатель (скалярное управление электроприводом).
2. Алгоритм векторного управления.
3. Алгоритм прямого управления моментом.
При скалярном управлении контур управления разомкнут. Частота вращения электродвигателя в этом случае определяется моментом нагрузки и выходной частотой преобразователя f. Выходное напряжение преобразователя зависит от частоты и определяется соотношением K=U/f. Для каждого конкретного случая эта зависимость может иметь различный угол наклона U/f.
Система автоматической регулировки должна измерять фазные токи IА, IВ и вычислять активное значение тока, пропорциональное моменту. Область применения такого преобразователя с системой скалярного типа: насосы, вентиляторы, центрифуги, конвейеры.
Система автоматического регулирования с векторным управлением используется для регулирования частоты вращения или момента электродвигателя. Типичное применение: краны, подъемники, лебедки. Такое управление требует измерения тока статора IА, IВ и числа оборотов ротора двигателя. Полученные сигналы вводятся в математическую модель асинхронного электродвигателя. Система автоматического регулирования прямого управления моментом основана на реализации во времени работы двух моделей:
1. Регулирование в скользящем режиме вектора потокосцепления статора и момента М электродвигателя по значениям, их заданных и действительных величин. Такое регулирование осуществляется модулем сверхбыстрых процессоров.
2. Модель асинхронного электродвигателя через каждый промежуток времени осуществляет вычисление действительных значений потока статора и момента по вводимой в нее (модель) информации: токам фаз статора, напряжению звена постоянного тока и положению ключей инвертора. Кроме того, производится вычисление скорости асинхронного двигателя и частоты выходного тока инвертора. Этот метод прямого управления моментом привлекателен тем, что отсутствует широтно-импульсная модуляция и не используется датчик вращения электродвигателя.
Из сказанного следует, что реализовать два последних метода САР часто затруднительно.
В большинстве преобразователей частоты для формирования синусоидального тока в статорной обмотке асинхронного двигателя используется ШИМ (широтно-импульсная модуляция). Наряду с массой преимуществ такой способ получения синусоидального тока не свободен от существенных недостатков, главный из которых заключается в том, что для получения малых гармонических составляющих тока необходимо значительно увеличить частоту переключений ключей инвертора (до 20. 25 кГц). Это вызывает рост динамических потерь в ключах инвертора, а также усложнение и без того тяжелых энергетических условий, в которых работают силовые элементы схемы. Кроме того, принцип ШИМ не позволяет полностью использовать напряжение источника питания, особенно в случаях, когда необходимо реализовать повышенный момент на валу асинхронного двигателя.
Работа инвертора
На рис.1 показана принципиальная схема автономного инвертора напряжения для питания трехфазного асинхронного двигателя. Это устройство реализует ручное скалярное управление электродвигателем, поскольку нет обратной связи (не контролируется величина тока в обмотках статора). Реализация заданной статической зависимости между частотой f и действующим значением напряжения U, питающего электродвигатель, осуществляется вручную.
Задающий генератор выполнен на основе 3 инверторов DD1.1–DD1.3. Скважность его импульсов близка к 50%, и генератор работает на частоте, определяемой выражением F
1/[0,5(R2+R3)C1]. Такой генератор мало чувствителен к изменениям величины напряжения питания. Регулирование частоты генератора (а, следовательно, и выходной частоты преобразователя) осуществляется резистором R3.
Широтно-импульсный модулятор построен на микросхеме DD7 и инверторе DD11.2. Микросхема DD7 (западный аналог этой микросхемы CD4007) содержит два инвертора и два полевых (р-канальный и n-канальный) транзистора. Сопротивление каналов этих транзисторов почти линейно зависит от входного напряжения. Полевые транзисторы включены через диоды VD1 и VD2 параллельно резистору R9.
При высоком уровне напряжения на выходе генератора диод VD2 будет проводить, т.е. выходное сопротивление р-канала транзистора DD7.3 будет включено параллельно с резистором R9. Подобным же образом выходное сопротивление n-канального транзистора включается параллельно резистору R9 при низком уровне на выходе генератора.
Широтно-импульсный модулятор реализуется изменением скважности импульсов генератора в соответствии с входным напряжением, поступающим с двухзвенной интегрирующей цепочки R6C4, R7C5. Само изменение частоты колебаний минимально зависит от их скважности, так как выходное сопротивление одного транзистора возрастает, а другого всегда уменьшается при любой величине управляющего напряжения. Таким образом, среднее за период значение шунтирующего резистор R9 сопротивления остается постоянным. Частота колебаний генератора соответствует 10 кГц. Увеличение управляющего напряжения, поступающего на модулятор, приводит к увеличению длительности выходных импульсов. Уменьшение управляющего напряжения, соответственно, приводит к уменьшению длительности импульсов выходного сигнала. При этом частота колебаний остается неизменной.
Выходной сигнал задающего генератора (DD1.1–DD1.3) подается на вход 13 DD5.1 (с выв. 3 DD1.2), а также на тактовый вход 14 DD2 (с выв. 11 DD1.1).
На микросхеме DD2 выполнен десятичный счетчик-делитель частоты с дешифратором. Если на входе «разрешение» 13 ИМС DD2 присутствует низкий уровень, счетчик считает импульсы по положительному перепаду на тактовом входе 14. При высоком уровне на входе 13 ИМС DD2 действие тактового входа запрещается, и счет останавливается.
Высокий уровень на входе сброса R (выв. 15) DD2 счетчика устанавливает его в «нулевое» состояние. На каждом выходе счетчика-дешифратора DD2 высокий уровень последовательно появляется только на длительность периода тактового импульса.
Выходные импульсы с выходов микросхемы DD2 формируются в трехфазную импульсную последовательность с помощью микросхемы DD3. Микросхема DD4 осуществляет инверсию трехфазной импульсной последовательности.
С помощью D-триггеров микросхемы DD8 получают трехфазную импульсную последовательность, задержанную относительно исходной.
Из прямых и инверсных выходных сигналов микросхем DD3.1–DD3.3, DD4.1–DD4.3 и триггеров DD8 логические элементы DD9.1, DD9.2, DD10.1, DD10.2, DD11.1, DD11.3 формируются импульсы управления «верхними» и «нижними» силовыми ключами.
Преобразователь реализован по схеме полного трехфазного моста, выполненного на шести транзисторах VT1–VT6. Синусоидальный выходной сигнал формируется методом широтно-импульсной модуляции. Управляется мост тремя высокочастотными драйверами типа IR2110 (ИМС DA1–DA3), способными перезаряжать затворы полевых транзисторов током до 2 А. Входное напряжение для этих драйверов должно находиться в пределах 10. 15 В. При снижении напряжения ниже 10 В драйвер отказывается работать, так как он имеет встроенную схему контроля питающего напряжения. Повышение напряжения выше 15 В приводит к выходу из строя драйверов или затворов полевых транзисторов. Максимальное напряжение между затвором и истоком VT1–VT6 составляет 20 В. Драйверы DA1–DA3 имеют вход SD, при подаче на который сигнала высокого уровня они запираются, и преобразователь не работает. Это можно использовать для защиты преобразователя от перегрузки. Выходной сигнал с задающего генератора поступает на делитель частоты на 3 (DD5.1, DD6.1, DD6.2), а также на логический элемент «Исключающее ИЛИ», выполненный на микросхеме DD5.3.
Логический элемент DD5.2 в сочетании с резистором R4 и конденсатором C2 создает пусковой импульс, устанавливающий оба триггера ИМС DD6 в исходное состояние. Выходной сигнал делителя частоты на 3 (сдвинут на 180° относительно входного), проходит через две последовательно соединенные интегрирующие цепочки R6C4, R7C5 и представляет собой по форме приблизительно синусоиду с периодом в 10 мс. Выходной сигнал логического элемента DD5.3 – прямоугольный импульс длительностью 0,5 мс и периодом в 1,7 мс. Длительность импульса можно регулировать, изменяя величину резистора R5. От длительности импульса зависит величина зазора между включением силовых ключей. Это необходимо для того, чтобы силовые ключи не оказались одновременно открытыми, что опасно протеканием через них сквозных токов.
Диоды VD7–VD10 устанавливаются в том случае, когда используемые в инверторе силовые транзисторы не имеют внутреннего диода. Мощность преобразователя зависит от типа примененных полевых транзисторов. Полевые транзисторы, а также транзисторы IGBT можно устанавливать параллельно для увеличения мощности преобразователя.
На рис.2 показаны временные диаграммы сигналов в определенных точках инвертора, а именно:
1 – тактовая частота задающего генератора;
2 – выходной сигнал логического элемента DD5.3;
3 – вывод12 D-триггера DD6.2;
4 – импульсная последовательность на выводе 9 логического элемента DD3.1;
6 – импульсная последовательность на выводе 6 логического элемента DD3.2;
8 – импульсная последовательность на выводе 10 логического элемента DD3.3. (т.е. образуется прямая трехфазная импульсная последовательность);
5, 7, 9 – инверсная трехфазная импульсная последовательность, на выводах логических элементов DD4.1–DD4.3;
10, 12, 14 – задержанная (на длительность импульса логического элемента DD5.3) прямая трехфазная импульсная последовательность;
11, 13, 15 – задержанная инверсная трехфазная импульсная последовательность;
16, 18, 20 – входные сигналы верхних ключей драйверов DA1–DA3;
17, 19, 21 – входные сигналы нижних ключей драйверов DA1–DA3;
Сигналы 6–21 показаны без высокочастотного заполнения.
Как правило, в преобразователях частоты для получения широтно-импульсной модуляции используются микропроцессоры. Мне хотелось решить эту задачу аппаратным способом. Проблема заключается в том, что широтно-импульсную модуляцию необходимо менять на каждом полупериоде синусоидального напряжения.
Силовая часть инвертора особенностей не имеет, но желательно использовать устройство для «плавного» пуска [1].
Литература
1. Калашник В. Устройство для «плавного» пуска нагрузки в электросети // Электрик. – 2011. – №4. – С.82–83.







