- Схемы торможения асинхронных двигателей
- Схема динамического торможения асинхронного двигателя с короткозамкнутым ротором
- Пуск асинхронного двигателя с кз ротором
- Осатнов асинхронного двигателя с кз ротором
- Трёхфазные асинхронные двигатели: методы торможения
- Варианты построения электрических тормозов
- Принцип торможения противотоком
- Торможение двигателя с короткозамкнутым ротором
- Противоточное торможение на двигателях с фазным ротором
- Торможение вводом постоянного тока
- Критерии применения метода вводом постоянного тока
- Торможение двигателей электронным и сверхсинхронным способом
- Другие тормозные системы
- Видео торможения вала двигателя динамическим способом
Схемы торможения асинхронных двигателей
 После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
Такая остановка электродвигателя при движении по инерции называется свободным выбегом . Многие электродвигатели, работающие в продолжительном режиме или со значительными нагрузками, останавливают путем свободного выбега.
В тех же случаях, когда продолжительность свободного выбега значительна и оказывает влияние на производительность электродвигателя (работа с частыми пусками), для сокращения времени остановки применяют искусственный метод преобразования кинетической энергии, запасенной в движущейся системе, называемый торможением .
Все способы торможения электродвигателей можно разделить на два основных вида: механическое и электрическое.
 При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При электрическом торможении кинетическая энергия преобразуется в электрическую и в зависимости от способа торможения двигателя либо отдается в сеть, либо преобразуется в тепловую энергию, идущую на нагрев обмоток двигателя и реостатов.
Наиболее совершенными считают такие схемы торможения, при которых механические напряжения в элементах электродвигателя незначительны
Схемы динамического торможения асинхронных двигателей
Для управления моментом при динамическом торможении асинхронным двигателем с фазным ротором по программе с заданием времени используются узлы схем, приведенные н а рис. 1, из которых схема р и с. 1, а применяется пр и наличии сети постоянного тока, а схема рис. 1, б — при отсутствии ее.
В качестве тормозных резисторов в роторе используются пусковые резисторы R1, включение которых в режиме динамического торможения производится отключением контакторов ускорения, показанных в рассматриваемых узлах схем условно в виде одного контактора КМ3, команда на отключение которого подается блокировочным контактом линейного контактора КМ1.
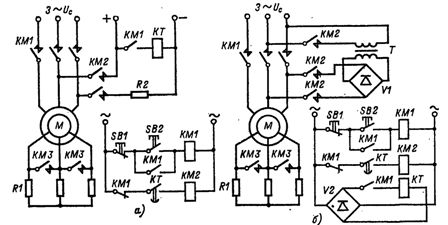
Рис. 1 Схемы управления динамическим торможением асинхронных двигателей с фазным ротором с заданием времени при наличии и отсутствии сети постоянного тока
Эквивалентное значение постоянного тока в обмотке статора при торможении обеспечивается в схеме рис. 1, а дополнительным резистором R2, а в схеме рис. 1. б соответствующим выбором коэффициента трансформации трансформатора Т.
Контактор торможения КМ2 может быть выбран как на постоянном, так и на переменном токе в зависимости от требуемого числа включений в час и использования пусковой аппаратуры.
Приведенные н а рис. 1 схемы управления могут использоваться для управления режимом динамического торможения асинхронного двигателя с короткозамкнутым ротором. Для этого обычно используется схема с трансформатором и выпрямителем, приведенная на р и с. 1 , б.
Схемы торможения противовключением асинхронных двигателей
При управлении моментом при торможении противовключением асинхронного двигателя с короткозамкнутым ротором с контролем скорости применяется узел схемы, приведенный на рис. 2.
В качестве реле противовключения используется реле контроля скорости SR, укрепляемое на двигателе. Реле настраивается на напряжение отпадания, соответствующее скорости, близкой к нулю и равной (0,1 — 0,2) ω уст.
Схема используется для остановки двигателя с торможением противовключением в реверсивной (рис. 2, а) в в нереверсивной (рис. 2, б) схемах. Команда SR используется для отключения контакторов КМ2 или КМЗ и КМ4, отключающих обмотку статора от напряжения сети при скорости двигателя, близкой к нулю. При реверсировании двигателя команды SR не используются.
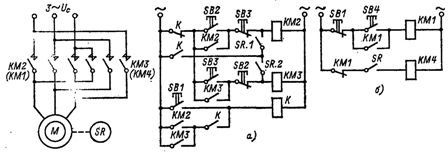
Рис. 2 Узлы схемы управления торможения противовключением асинхронного двигателя с коооткозамкнутым ротором с контролем скорости при остановке в реверсивной и нереверсивной схемах
Узел управления асинхронным двигателем с фазным ротором в режиме торможения противовключеиием с одной ступенью, состоящей из R1 и R2, приведен на рис. 3. Управляющее реле противовключения KV, в качестве которого применяется, например, реле напряжения постоянного тока типа РЭВ301, которое подключено к двум фазам ротора через выпрямитель V. Реле настраивается на напряжение отпадания.
Часто для настройки реле KV используется дополнительный резистор R3. Схема в основном применяется при реверсировании АД со схемой управления, приведенной на рис. 3, а, но может использоваться и при остановке в нереверсивной схеме управления, приведенной на рис. 3, б.
При пуске двигателя реле противовключения КV не вклгочатся и ступень противовключения резистора ротора R1 выводится сразу после подачи управляющей команды на пуск.
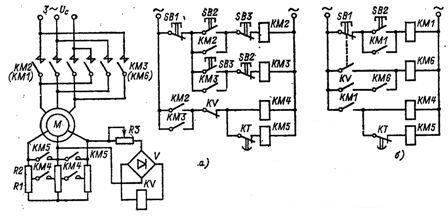
Реле KV отключает контакторы КМ4 и КМ5 и тем самым вводит полное сопротивление Rl + R 2 ротор двигателя.
В конце процесса торможения при скорости асинхронного двигателя, близкой к нулю и составляющей примерно 10 — 20 % установившейся начальной скорости ω пер = (0,1 — 0,2) ωуст , реле KV отключается, обеспечивая команду на отключение ступени противовключения R1 с помощью контактора КМ4 и на реверсирование электродвигателя в реверсивной схеме или команду на остановку электродвигателя в нереверсивной схеме.
В приведенных схемах в качестве управляющего устройства может применяться командоконтроллер и другие аппараты.
Схемы механического торможения асинхронных двигателей
При остановке асинхронных двигателей, а также для удержания механизма передвижения или подъема, например в крановых промышленных установках, в неподвижном состоянии при отключенном двигателе применяется механическое торможение. Оно обеспечивается электромагнитными колодочными или другими тормозами с трехфазным электромагнитом переменного тока, который при включении растормаживает тормоз. Электромагнит тормоза YB включается и отключается вместе с двигателем (рис 4, а).
Напряжение на электромагнит тормоза YB может подаваться контактором торможения КМ2, если нужно отключать тормоз не одновременно с двигателем, а с некоторой задержкой по времени, например после окончания электрического торможения (рис. 4, б)
Выдержку времени обеспечивает реле времени КТ, получающее команду на начало отсчета времени, обычно при отключении линейного контактора КМ1 (рис. 4, в).
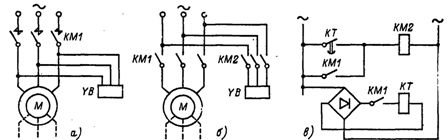
Рис. 4. Узлы схем, осуществляющих механическое торможение асинхронных двигателей
В асинхронных электроприводах применяются также электромагнитные тормоза постоянного тока при управлении электродвигателем от сети постоянного тока.
Схемы конденсаторного торможения асинхронных двигателей
Для торможения АД с короткозамкнутым ротором применяется также конденсаторное торможение с самовозбуждением. Оно обеспечивается конденсаторами C1 — С3, подключенными к обмотке статора. Включаются конденсаторы по схеме звезды (рис. 5, а) или треугольника (рис. 5, б).
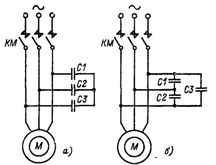
Рис. 5. Узлы схем, осуществляющих конденсаторное торможение асинхронных двигателей
Схема динамического торможения асинхронного двигателя с короткозамкнутым ротором

Динамическое торможение асинхронного двигателя выполняется отключением двигателя от трехфазной сети и подачи постоянного напряжения на любые две обмотки статора (AB, BC или AC). Магнитный поток в обмотках статора, взаимодействует с током ротора, создавая тормозной момент, что приводит к полному останову двигателя.
Пуск асинхронного двигателя с кз ротором
Подача напряжения на управляющую и силовую цепь осуществляется автоматическим выключателем QF. Нажатием кнопкой SB1 “Пуск” запитывается магнитный пускатель КМ1, который срабатывает и замыкает свои контакты:
- КМ1.1 в цепи статора — двигатель запускается
- КМ1.2 — шунтирует кнопку “Пуск”
- КМ1.3 -подает напряжения на реле времени КТ
и размыкает нормально замкнутый контакт КМ1.4 который не даст сработать магнитному пускателю КМ2, после срабатывания реле времени КТ.
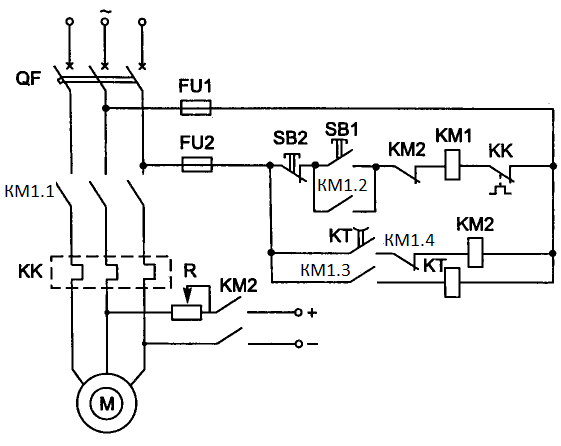 Рисунок.1. Схема управления асинхронным двигателем с короткозамкнутым ротором с динамическим торможением в функции времени
Рисунок.1. Схема управления асинхронным двигателем с короткозамкнутым ротором с динамическим торможением в функции времени
Осатнов асинхронного двигателя с кз ротором
При нажатии кнопки SB2 “Стоп” катушка пускателя КМ1 обесточивается и пускатель одновременно возвращает свои контакты в исходное положение:
- Размыкает КМ1.1 (прекращает подачу электрического тока на обмотку статора) – асинхронный двигатель обесточен.
- Размыкает КМ1.2 — разблокирует кнопку пуска
- Размыкает КМ1.3 — обесточивает реле времени КТ
- Замыкает нормально замкнутый контакт КМ1.4, что приводит подачи напряжения на контактор КМ2, так как контакты реле времени КТ размыкаются не сразу, а через заданный временной интервал. При срабатывании КМ2 на статор асинхронного двигателя подаётся постоянное напряжение, двигатель переходит в режим динамического торможения.
В схеме применено реле времени с выдержкой времени при размыкании. Длительность подачи постоянного напряжения на статор будет равна выдержки реле КТ. После истечении выдержки скорость вала двигателя близка к нулю, контакты КТ размыкаются и обесточивают КМ2 и двигатель отключается от сети.
Для регулировки интенсивности торможения в цепь статора включен регулировочный резистор R. В схеме применена блокировка с помощью размыкающих контактов КМ1.4 и КМ2 для невозможности включения статора двигателя одновременно в сеть постоянного и трехфазного тока.
Трёхфазные асинхронные двигатели: методы торможения
Главная страница » Трёхфазные асинхронные двигатели: методы торможения

Значительное число приводных систем используются при естественном замедлении работы двигателей в процессе остановки. Время, затрачиваемое на остановку ротора, измеряется исключительно инерционным моментом и моментом сопротивления вращению. Между тем нередко эксплуатация систем требует сокращать время остановки вала мотора и в этом случае электрическое торможение хода электродвигателя видится простым и эффективным решением. По сравнению устройствами, где применяются механический или гидравлический способы, электрическое торможение двигателей имеет явные преимущества в плане устойчивости действия и экономичности применения.
Варианты построения электрических тормозов
Рассмотрим несколько вариантов торможения двигателей электрическим способом, которые могут быть применимы на практике. При этом отметим возможности использования механизмов торможения по отношению к электродвигателям разных видов. Список рассматриваемых методик торможения включает следующие:
- противотоком,
- вводом постоянного тока,
- электронным способом,
- сверхсинхронной скоростью,
- другими способами.
Принцип торможения противотоком
Мотор отключается от электросети, и пока ротор продолжает вращаться, вновь подключается противофазой. Такая система создаёт эффективный момент блокировки, обычно превышающий пусковой момент.
Между тем, этот эффективный момент торможения должен быть быстро нивелирован, чтобы двигатель после остановки не вращался в противоположном направлении. Несколько устройств контроля и автоматики привлекаются для обеспечения замедления вращения вала электродвигателя до его полной остановки:
- датчики остановки фрикциона,
- датчики центробежного останова,
- хронометрические приборы,
- реле частоты,
- реле напряжения ротора (для двигателей с фазным ротором) и т. д.
Торможение двигателя с короткозамкнутым ротором
Прежде чем выбирать систему противотока для асинхронного мотора с КЗ ротором, важно обеспечить устойчивость двигателя к противоточному способу с учётом требуемой нагрузки.
Помимо механических напряжений, этот процесс подвергает ротор воздействию высоких тепловых нагрузок, так как энергия, выделяемая при каждой операции, рассеивается в теле ротора.
Тепловое напряжение на противотоке в три раза больше, чем при наборе скорости вращения. Здесь пики тока и крутящего момента заметно выше, если сравнивать с моментом пуска.
 Принцип методики противоточного воздействия на схему электродвигателя с целью быстрого замедления хода с последующей остановкой. Слева — нормальный рабочий цикл. Справа — цикл замедления и останова
Принцип методики противоточного воздействия на схему электродвигателя с целью быстрого замедления хода с последующей остановкой. Слева — нормальный рабочий цикл. Справа — цикл замедления и останова
Поэтому для обеспечения плавного останова двигателя системой противотока, как правило, последовательно с каждой фазой статора устанавливают резистор. Благодаря такому добавлению, при переключении уменьшается крутящий момент и ток, до значений, равных тем, что отмечаются на статоре в режиме пуска.
Однако противоточная система торможения имеет ряд серьёзных недостатков. Поэтому этот способ для асинхронных двигателей с короткозамкнутым ротором используется в редких случаях и преимущественно на маломощных моторах.


Противоточное торможение на двигателях с фазным ротором
Чтобы ограничить ток и крутящий момент, прежде чем статор будет переключен на противоточный ход, крайне важно использовать резисторы ротора, используемые для запуска.
При этом следует периодично добавлять дополнительную резистивную секцию торможения. При правильно подобранном значении роторного резистора, регулировать тормозной момент до требуемого значения несложно.
Момент переключения тока даёт напряжение ротора практически в два раза большее, чем когда ротор находится в состоянии покоя, что иногда требует особых мер при изоляции.
 Принцип противоточной электрической блокировки на моторах с фазным ротором. Слева — нормальный режим работы. Справа — замедление с остановом
Принцип противоточной электрической блокировки на моторах с фазным ротором. Слева — нормальный режим работы. Справа — замедление с остановом
Как и в случае с силовыми двигателями, цепь ротора выделяет значительное количество энергии. Вся выделенная энергия полностью рассеивается на резисторах (за исключением небольших потерь).
Двигатель может быть остановлен автоматически одним из вышеупомянутых устройств контроля. Например, с помощью реле напряжения или частоты в цепи ротора. С помощью схемы противотока удаётся поддерживать ведущую нагрузку с умеренной скоростью.
Однако характеристика крайне неустойчива (значительные колебания скорости по отношению к малым изменениям крутящего момента).
Торможение вводом постоянного тока
Этот вариант используется на двигателях с фазным и короткозамкнутым ротором. Если сравнивать с противоточной системой, стоимость применения источника выпрямленного тока компенсируется меньшим количеством резисторов.
Благодаря электронным регуляторам скорости и стартерам, этот способ торможения асинхронных электродвигателей видится вполне экономичным.
 Принцип останова путём ввода постоянного тока. Для работы этой системы требуется источник постоянного напряжения. Требования к величине напряжения не критичны
Принцип останова путём ввода постоянного тока. Для работы этой системы требуется источник постоянного напряжения. Требования к величине напряжения не критичны
Методика предполагает отключение обмоток статора от сети и подачу на обмотки выпрямленного тока. Прохождение выпрямленного тока по обмоткам статора сопровождается образованием фиксированного потока в воздушном зазоре между ротором и статорным кольцом двигателя.
Для достижения значения этого потока, способного обеспечить надлежащее торможение, ток должен быть примерно в 1,3 раза выше номинального тока. Избыток тепловых потерь, неизбежно вызываемых этим незначительным превышением, обычно компенсируется временной паузой после останова мотора.
Критерии применения метода вводом постоянного тока
Поскольку значение тока зависит от сопротивления обмотки статора, напряжение на источнике выпрямленного тока невысокое. Обычно источником выступает схема выпрямителя или контроллера скорости.
Эти источники выпрямленного тока должны быть адаптированы к переходным скачкам напряжения, происходящим на обмотках в момент отсоединения от переменного источника питания.
Движение ротора здесь следует рассматривать скольжением относительно поля, зафиксированного в пространстве. Поведение двигателя аналогично синхронному генератору с разгрузкой на роторе. Поэтому важны отличия характеристик, полученных на торможении вводом выпрямленного тока, по сравнению с противоточной схемой:
- Меньше энергии рассеивается на резисторах ротора или в теле ротора. Процесс эквивалентен механической энергии, массово выделяемой при движении. Единственная мощность, потребляемая от сети, — возбуждение статора.
- Когда нагрузка не является управляемой, двигатель не запускается в противоположном направлении.
- Если нагрузка является управляемой, система действует постоянно и удерживает нагрузку на низкой скорости. То есть достигается фактор замедления, а не полного торможения. Характеристика намного стабильнее, чем у системы противотока.
На моторах с фазным ротором характеристики крутящего момента зависят от выбора резисторов.
 Вариант тормозных резисторов: 1 — датчик нагрева; 2 — металлический шунт; 3 — высокотемпературный проводник; 4 — проволочный резистивный элемент; 5 — температурный блок; 6 — корпус
Вариант тормозных резисторов: 1 — датчик нагрева; 2 — металлический шунт; 3 — высокотемпературный проводник; 4 — проволочный резистивный элемент; 5 — температурный блок; 6 — корпус
На двигателях с короткозамкнутым ротором система позволяет легко регулировать момент торможения электродвигателя, воздействуя на энергетику постоянного тока. Тем не менее, тормозной момент остаётся низким, если мотор имеет высокие обороты.
Торможение двигателей электронным и сверхсинхронным способом
Эффект электронного торможения достигается относительно просто с помощью регулятора скорости, оснащенного тормозным резистором. Асинхронный двигатель действует как генератор. Механическая энергия рассеивается на ограничительном резисторе без увеличения потерь в самом двигателе.
Эффект торможения проявляется, когда двигатель достигает верхней точки синхронной скорости с переходом на более высокие значения. Здесь фактически инициируется режим асинхронного генератора и развивается тормозной момент. Возникающие при этом потери энергии восстанавливаются электросетью.
Подобный режим работы проявляется на двигателях подъёмников при спуске груза с номинальной скоростью. Тормозной момент полностью уравновешивается крутящим моментом от нагрузки.
За счёт этого равновесия удаётся тормозить не ослаблением скорости, а выводом двигателя в режим работы на постоянной скорости.
Для варианта эксплуатации моторов с фазным ротором, все или часть резисторов ротора должны быть накоротко замкнутыми, чтобы двигатель не развивал движение значительно выше номинальной скорости.
Сверхсинхронная система функционально видится идеальной для ограничения движения под нагрузкой, потому что:
- Скорость остаётся стабильной и практически не зависит от вращающего момента,
- Энергия восстанавливается и возобновляется в сети.
Тем не менее, сверхсинхронное торможение электродвигателей поддерживает только одну скорость вращения, как правило, номинальное вращение. На частотно-регулируемых двигателях используются сверхсинхронные схемы, благодаря которым изменяется скорость вращения вала от верхнего значения к нижнему значению.
Сверхсинхронное торможение легко достигается с помощью электронного регулятора скорости, который автоматически запускает эту систему при понижении частоты.
Другие тормозные системы
Редко, но всё-таки встречаются системы однофазного торможения. Эта методика включает питание двигателя между двумя фазами сети и подключает незанятый терминал к одному из двух других сетевых подключений.
 Вариант остановки простым реверсивным переключением — реверс поля вращения, образованного обмотками статора
Вариант остановки простым реверсивным переключением — реверс поля вращения, образованного обмотками статора
Тормозной момент ограничивается 1/3 максимального крутящего момента двигателя. Этой системой невозможно остановить мотор на полной нагрузке.
Поэтому такая схема традиционно дополняется противоточным методом. Вариант однофазной блокировки характеризуется значительным дисбалансом и высокими потерями.
Также применяется торможение электродвигателей ослаблением вихревых токов. Здесь работает принцип, аналогичный тому, что используется на промышленных транспортных средствах в дополнение к механическому торможению (электрические редукторы).
Механическая энергия рассеивается в редукторе скорости. Замедление и остановка электродвигателя контролируется простым возбуждением обмотки. Выраженный недостаток этого метода — значительное увеличение инерции.







