- Регулятор оборотов с обратной связью для коллекторных двигателей переменного тока
- Стабилизатор оборотов коллекторного двигателя 12В
- Регулятор оборотов коллекторного двигателя без потерь
- Особенности регулирования скорости
- Обобщенная схема регулятора
- Разновидности коллекторных двигателей
- Конструкция мотора
- Выбор схемы
- Особенности конструкции
- Принцип управления
Регулятор оборотов с обратной связью для коллекторных двигателей переменного тока
Большинство мировых производителей профессиональных угловых шлифовальных машинок (болгарок) таких как Bosch, Metabo, Makita, DeWalt и других используют два типа регуляторов оборотов с обратной связью.
С помощью таходатчика
На конце якоря мотора установлен кольцевой магнит с прорезью или срезом, а на плате регулятора установлена катушка индуктивности или датчик Холла. Такой регулятор обеспечивает максимально точную стабилизацию оборотов двигателя при изменении нагрузки.
На основе измерения падения напряжения на электродвигателе
В этом случае измеряется падение напряжения на двигателе, и схема управления изменяет длительность открытия силового ключа. Такой регулятор, если он правильно настроен, обеспечивает также хорошую стабилизацию оборотов двигателя при изменении нагрузки.
Все промышленные регуляторы, собранные на микроконтроллерах, полностью залитые эпоксидной смолой и в итоге они не пригодны для ремонта, а цена за новый регулятор достаточно большая, и составляет примерно 20-30% от стоимости самого электроинструмента.
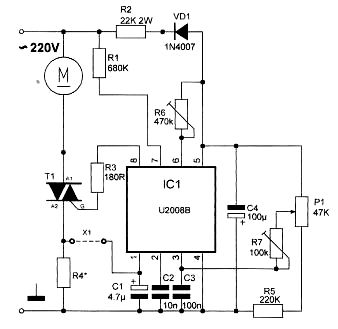
В поиске специализированных микросхем для решения данной задачи мне приглянулись регуляторы Phase Control фирмы Atmel. Например, простой вариант регулятора на микросхеме U2008B. Рассмотрим схему регулятора на ИМС U2008B приведенную на рис.1. В данном регуляторе можно использовать обратную связь по току или режим плавного пуска, однако в нём нет защиты от перегрузки. Если использовать плавный пуск тогда нужны только элементы С1, R4 и перемычку Х1 не ставим, а если нужна обратную связь — тогда все наоборот.
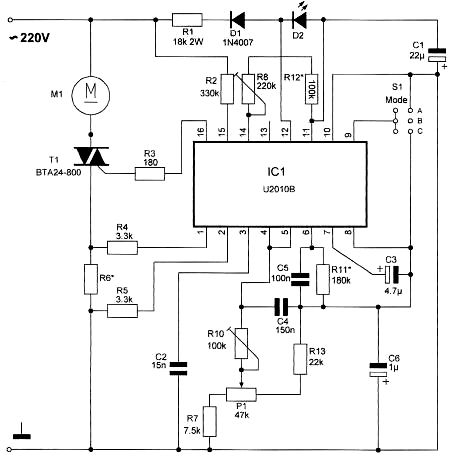
Так как ИMC U2008B не может одновременно работать в режиме плавного пуска и обратной связи, она не подходит для нашей задачи. На рис.2 показана схема регулятора на микросхеме U2010B, у которой есть обратная связь по току, защита от перегрузки и плавный старт одновременно. Светодиод D2 индицирует перегрузку электродвигателя. Переключатель SA1 «Mode» обеспечивает возможность выбора действий при перегрузке на двигателе в трех режимах: Положение А — индикация перегрузки и последующий сброс на минимальные обороты. Для восстановления рабочих оборотов, необходимо выключить инструмент.
Положение В — индикация перегрузки, последующий сброс на минимальные обороты, после снятие нагрузки с инструмента, восстанавливаются установленные обороты, т.е. происходит авто старт.
Положение С — только индикация перегрузки, без остановки двигателя и защиты.
Подбором ёмкости конденсатора СЗ от 1 до 10 мкФ можно изменять длительность и плавность пуска двигателя.
Настройка регулятора.
В техническом описании к ИМС U2010B в схеме подключения обозначено только падение напряжение на R6 в 250 мВ и не указано, каким именно должен быть этот резистор.
Рассчитать сопротивление R6 можно исходя из мощности двигателя по формуле:
где:
UR6 — напряжение на R6 (250 мВ),
Рдвиг — мощность двигателя,
UПИТ — напряжение питания сети.
Например, для двигателя мощностью 750 Вт рассчитываем: R6= 0,25/(750/220) = 0,07 Ом.
Номиналы резисторов R6 и R11, в зависимости от мощности электродвигателя, приведены в таблице.
| R11 Мощность, Вт | R6*, Ом | Нихром, D 1 мм | Нихром, D 0,8 мм | R11*, кОм |
| 250 | 0,22 | 30 | 19 | 180-270 |
| 300 | 0,18 | 27 | 17 | 180-220 |
| 550 | 0,1 | 25 | 16 | 180 |
| 700 | 0,08 | 20 | 14 | 160 |
| 850 | 0,07 | 17 | 11 | 150 |
| 1000 | 0,055 | 15 | 10 | 100-120 |
| 1200 | 0,047 | 13 | 9 | 90-110 |
| 1500 | 0,04 | 12 | 8 | 80-100 |
| 1800 | 0,03 | 10 | 7 | 70-100 |
| 2000 | 0,028 | 8 | 6 | 65-90 |
| 2200 | 0,025 | 7 | 5 | 65-90 |
Главное правильно подбирать резистор R6 под мощность двигателя. Выше представленная формула правильная, но на практике может потребоваться некоторая коррекция по поведению двигателя под нагрузкой. Если резистор великоват, то двигатель довольно резко стартует (т.е. происходит большая компенсация нагрузки, чем надо), а потом отключается, а если резистор будет мал, то не будет обеспечиваться компенсация нагрузки.
В Datasheet к ИМС U2010B ёмкость конденсатора С2 указана 0,01 мкФ, но она рассчитана на 60-герцовую сеть, и при использования ИМС в сети 50 Гц за период выдавалось несколько импульсов управления. В итоге, обороты электродвигателя практически не регулировались и двигатель работал на полную мощность. Для сети с частотой 50 Гц нужно ёмкость конденсатора С2 увеличить до 0,015 мкФ.
Первый пуск
Переменный резистор Р1 (регулятор оборотов) нужно установить на минимальные обороты двигателя, по схеме движок потенциометра должен быть повернут в сторону резистора R13. Затем подстроенный резистор R10 (компенсация нагрузки) установить в среднее положение, а на место R11 (перегрузка) временно подпаять постоянный резистор сопротивлением 62 кОм. Потом включить регулятор в сеть 220 В / 50 Гц и подстроенным резистором R8 выставить самые минимальные обороты двигателя.
Нужно сделать так, чтобы при включении двигатель начинал вращаться на минимальных оборотах. Если настроить устройство так, чтобы совсем не было напряжения на электродвигателе, то тогда становится слишком нелинейная зависимость управления резистором Р1 — при его повороте сначала двигатель не крутится, а потом резко стартует без плавного пуска.
Далее нужно подключить вольтметр с диапазоном измерения 300 В к выводам двигателя, включить двигатель и на средних оборотах, зажимая вал или привод двигателя через тряпку рукой, выставить такое положение резистора R10, чтобы обороты электродвигателя не менялись при изменении нагрузки на его валу. Одновременно с этим нужно смотреть на вольтметр, подключенный к двигателю. При увеличении нагрузки на валу электродвигателя регулятор прибавляет напряжение, и двигатель крутится с одинаковыми оборотами, независимо от нагрузки.
И вот в последнюю очередь настраивается резистор R11 (перегрузка). Постоянный резистор номиналом 62 кОм выпаиваем и вместо него ставим подстроенный или переменный резистор номиналом 220 кОм. На оборотах двигателя чуть больше минимальных, сильно зажимая вал или привод двигателя, стараемся почти заклинить вал двигателя, и по степенно изменяем величину резистора R11, пока не начнет срабатывать защита, и не станет светиться VD2. Затем измерьте сопротивление переменного резистора тестером и запаяйте в устройство соответствующий резистор. В таблице указано приблизительные значения сопротивления R11,
Детали регулятора
Купить микросхемы U2008B, U2010B можно через сайт AliExpress (www.ru.aliexpress.com) в Китае с бесплатной доставкой на Украину, а далее посылка бесплатно отправляется через «Укрпочту» в любое почтовое отделение на территории Украины. Доставка на Украину производится на протяжении 25-40 дней. Например, цена 1 шт. микросхемы U2010B зависит от корпуса исполнения, примерно 0,9 USD в корпусе S016 и 1,2 USD в корпусе DIP16, а симистора ВТА24-800 — 0,4 USD.
Печатная плата устройства изготовлена из одностороннего фольгированного стеклотекстолита толщиной 1 мм.
Симистор VS1 лучше использовать с изолированной площадкой под радиатор серии ВТА, например BTA12-800, BTA16-800, BTA24-800, или применить другие. При мощности двигателя до 400 Вт, VS1 можно не устанавливать на радиатор. Все SMD детали типоразмера 1206, их можно запаять обычным паяльником с тонким жалом.
Подстроенные резисторы — типа СП3-19а или другой малогабаритный. Переменный резистор Р1 любой на 47-50 кОм, можно малогабаритные СП4-1, СП3-9. Резистор R1 мощностью не менее 2 Вт, например, типа MЛT-2 или др. Резистор R6 изготовлен из нихромовой проволоки диаметром 0,7 — 1 мм. Автор использовал нихромовый провод из старого блока сопротивлений для зажигания автомобилей ГАЗ с маркировкой 1402.3729. Все электролитические конденсаторы на напряжение не менее 50 В. Диод D1 — типа 1N4007 или КД208, также можно использовать диод в SMD исполнении. Светодиод D2 любой малогабаритний диаметром 3-5 мм красного света. Переключатель SA1 любой малогабаритный 3-х позиционный. Если нужен только один режим перегрузки, тогда вместо него можно установить перемычку.
Литература:
- Бирюков С. Автомат плавного пуска коллекторных электродвигателей. // Радио. — 1997. — №7. — С.40-42.
Печатная плата для схемы показанной на рисунке 2:
Автор: Валентин Шипляк, г. Ужгород
Стабилизатор оборотов коллекторного двигателя 12В
Схема стабилизатора оборотов (как и другие аналогичные) основана на получении сигнала, пропорционального частоте вращения
Основных отличий два:
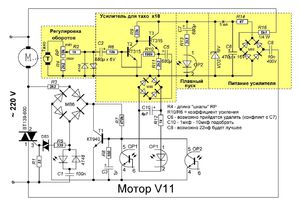
— для выделения напряжения пропорционального частоте вращения якоря используется мостовая схема, которая позволяет выделять напряжение противо-ЭДС ротора, пропорциональное скорости вращения
Далее полученное напряжение Uoc можно использовать для обратной связи по сути любого источника питания.
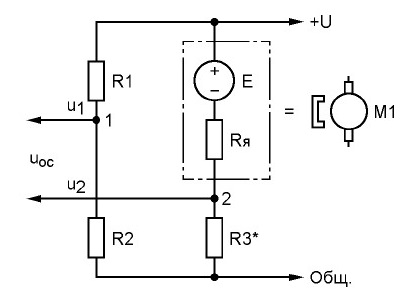
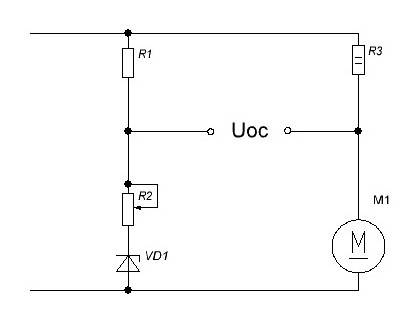
В описываемой схеме мост выглядит следующим образом
При соблюдении пропорции R1/R2 = R3/Rя (Rя — сопротивление якоря) и при Uос = 0 — мы получим компенсацию Rя и соответственно Е противо-ЭДС ротора будет равно напряжению стабилизации VD1
Если VD1 сделать регулируемым, то, по сути, меняя напряжение его стабилизации, мы меняем напряжение непосредственно на роторе двигателя (скомпенсировав влияние Rя) и обеспечиваем стабильность скорости вращения.
В данном случае за основу была взята TNY268P в стандартной схеме включения (по даташиту)
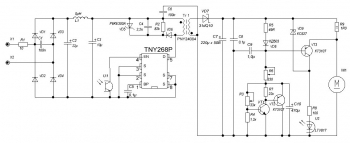
Левая от трансформатора часть схемы — стандартная обвязка TNY268 (может быть по сути использована за основу любая конструкция ИБП с максимально широким диапазоном выходного напряжения (этот диапазон определяет диапазон изменения скорости ротора) и требуемой мощностью.
В правой части схемы собственно мост образуют резисторы R5, R6 и R9 (аналогично R1, R2 и R3 на схеме на среднем рисунке).
VT1, VT2 и обвязка из резисторов R3, R4, R7 образуют аналог стабилитрона с регулируемым напряжением стабилизации (можно заменить на TL431).
Собственно Uос появляется между базой и эмиттером VT3, который управляет током светодиода в оптопаре U2, создавая обратную связь.
VD8 введен как компенсатор напряжения база-эмиттер VT3. Емкости C9 и C10 придаю стабильность узлу обратной связи.
Стабилитрон VD9 ограничивает максимальное напряжение на выходе источника питания и, при наличии встроенной защиты от перенапряжения, не нужен.
При подготовке схемы под конкретную модель электродвигателя возможно номинал R5 будет другим (для соблюдения пропорции R5/(0,7*R6) = R9/Rя. Падение напряжения на R9 при номинальном потребляемом токе должно быть около 1В, больше нежелательно — будет сильно греться.
При настройке подстроечным резистором R6 выбираем нужную степень обратной связи, притормаживая двигатель рукой и делая им обороты, наиболее близкие к оборотам без нагрузки, но в то же время не допуская «подергиванием» якоря без нагрузи.
Схема показала хорошую повторяемость, работает как для польской электродрели / шлифовалки 12В Pegasus (вот такой) и работала с другим моторчиком на 24В.
Обороты регулируются от 500 до 12000 об/мин с очень хорошей стабильностью (рукой трудно удержать). Элементы греются незначительно — в основном R9.
Регулятор оборотов коллекторного двигателя без потерь
 Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать — момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать — момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Следовательно, необходимо индуктивность заменить на резистор, но это невозможно, потому что двигатель превратится во что-то иное и явно не станет приводить что-либо в движение. Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
Обобщенная схема регулятора
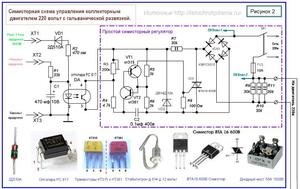 Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
- силовой управляемый выпрямитель;
- блок управления выпрямителем или схема импульсно-фазового регулирования;
- обратная связь по тахогенератору;
- блок регулирования тока в обмотках двигателя.
Перед тем как углубляться в более точное устройство и принцип регулирования, необходимо определиться с типом коллекторного двигателя. От этого будет зависеть схема управления его рабочими характеристиками.
Разновидности коллекторных двигателей
Известно, как минимум, два типа коллекторных двигателей. К первому относятся устройства с якорем и обмоткой возбуждения на статоре. Ко второму можно отнести приспособления с якорем и постоянными магнитами. Также необходимо определиться, для каких целей требуется сконструировать регулятор:
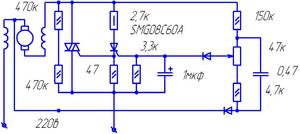
 Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.- Если необходимо управлять скоростью от 0 до максимума, тогда придется использовать полноценные схемы преобразователей с обратной связью и жёсткими характеристиками регулирования. Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.
 Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.Конструкция мотора
Конструктивно двигатель от стиральной машины «Индезит» несложен, но при проектировании регулятора управления его скоростью необходимо учесть параметры. Моторы могут быть различными по характеристикам, из-за чего будет изменяться и управление. Также учитывается режим работы, от чего будет зависеть конструкция преобразователя. Конструктивно коллекторный мотор состоит из следующих компонентов:
- Якорь, на нем имеется обмотка, уложенная в пазы сердечника.
- Коллектор, механический выпрямитель переменного напряжения сети, посредством которого оно передается на обмотку.
- Статор с обмоткой возбуждения. Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.
 При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования. Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Выбор схемы
Выяснив все условия, при которых будет использоваться мотор, можно начинать изготавливать регулятор оборотов коллекторного двигателя. Начинать стоит с выбора подходящей схемы, которая обеспечит вас всеми необходимыми характеристиками и возможностями. Следует вспомнить их:
- Регулирование скорости от 0 до максимума.
- Обеспечение хорошего крутящего момента на низких скоростях.
- Плавность регулирования оборотов.
Рассматривая множество схем в интернете, можно сделать вывод о том, что мало кто занимается созданием подобных «агрегатов». Это связано со сложностью принципа управления, так как необходимо организовать регулирование многих параметров. Угол открытия тиристоров, длительность импульса управления, время разгона-торможения, скорость нарастания момента. Данными функциями занимается схема на контроллере, выполняющая сложные интегральные вычисления и преобразования. Рассмотрим одну из схем, которая пользуется популярностью у мастеров-самоучек или тех, кто просто хочет с пользой применить старый двигатель от стиральной машины.
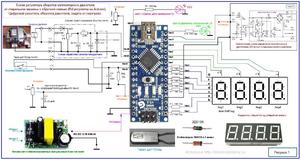
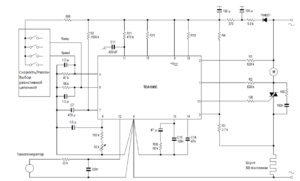
Всем нашим критериям отвечает схема управления скоростью вращения коллекторным двигателем, собранная на специализированной микросхеме TDA 1085. Это полностью готовый драйвер для управления моторами, которые позволяют регулировать скорость от 0 до максимального значения, обеспечивая поддержание момента за счёт использования тахогенератора.
Особенности конструкции
 Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
- Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
- Максимальная скорость вращения достигается 3200 об/мин. Эта характеристика зависит от типа двигателя. Схема может управлять моторами до 16 тыс. об/мин.
- Время разгона до максимальной скорости достигает 1 секунды.
- Нормальный разгон обеспечивается за 10 секунд от 800 до 1300 об/мин.
- На двигателе использован 8-полюсный тахогенератор с максимальным выходным напряжением на 6000 об/мин 30 В. То есть он должен выдавать 8мВ на 1 об/мин. При 15000 об/мин на нем должно быть напряжение 12 В.
- Для управления двигателем используется симистор на 15А и предельным напряжением 600 В.
 Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс. На рисунке не указано.
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:
- Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
 Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.







