- Стабилизатор частоты вращения коллекторного двигателя
- Стабилизатор оборотов коллекторного двигателя 12В
- Подборка схем регулятора оборотов двигателя постоянного тока
- Описание 4 схем регуляторов оборотов электродвигателя
- Первая схема
- Вторая схема
- Третья схема
- Детали регуляторов вращения электродвигателей
- Схема стабилизатора частоты вращения двигателя
Стабилизатор частоты вращения коллекторного двигателя
Стабилизатор частоты вращения коллекторного двигателя
Предлагаемый стабилизатор частоты вращения предназначен для работы с коллекторными двигателями и представляет собой полностью аналоговое устройство. Стабилизатор имеет обратную связь по частоте вращения, в то же время он не требует установки никакого тахогенератора.
Наиболее распространенным типом стабилизаторов частоты вращения ведущего двигателя кассетных магнитофонов является регулятор с положительной обратной связью по току [1]. Регулирование происходит параметрически, поэтому частота довольно сильно меняется при изменении нагрузки на валу двигателя. Для повышения качества работы стабилизатора необходимо ввести обратную связь по частоте вращения. Обычно при этом на вал двигателя устанавливается специальный датчик, чаще всего оптический [2]. Такой датчик включает в себя оптопару, световой поток которой прерывается крыльчаткой (или диском с отверстиями), которая насаживается на вал двигателя. Крыльчатка прерывает световой поток, и на выходе оптопары формируются импульсы с частотой вращения двигателя, умноженной на количество прорезей в крыльчатке. Иногда применяется и другой вид датчиков — магнитный. Тогда на вал двигателя устанавливается шестеренка из ферромагнитного материала, рядом с которой крепится магнитная головка. При вращении шестеренки на выводах головки появляется переменное напряжение с амплитудой около милливильта и частотой, равной частоте вращения двигателя, умноженной на количество зубъев на шестеренке. Однако, при доработке готового ЛПМ часто бывает трудно найти место для установки какого-либо датчика. Но это и не обязательно. Дело в том, что информацию о частоте вращения коллекторного двигателя можно извлечь из потребляемого им тока. Этот ток содержит переменную составляющую, первая гармоника которой имеет частоту, равную частоте вращения двигателя, умноженную на число пластин коллектора. Двигатели, которые чаще всего применяются в магнитофонах, имеют три пластины коллектора. Поэтому эта частота равна утроенной частоте вращения двигателя. Именно на этом принципе и построен описываемый регулятор.
Рис. 1. Принципиальная схема стабилизатора частоты вращения.
Для получения сигнала обратной связи в цепь питания двигателя включен датчик тока R1 (рис. 1). Ток, потребляемый двигателем, создает на этом резисторе падение, которое имеет переменную составляющую около 100 мВ peak-to-peak (рис.2, график 1). Основная гармоника выделяется с помощью простейшего ФНЧ R2C1 и через разделительный конденсатор C2 поступает на вход усилителя, собранного на ОУ U1A. Коэффициент усиления задан резисторами R4R5 так, чтобы усилитель работал в режиме ограничения. На его выходе формируетя практически прямоугольный сигнал с частотой, равной утроенной частоте вращения двигателя (рис. 2, график 2). Этот сигнал дифференцируется с помощью цепочки C3R6R7R8 (рис. 2, график 3). Отрицательный выброс ограничивается диодом VD1. Далее сигнал поступает на компаратор, в роли которого использован ОУ U1B. Опорное напряжение задается с помощью делителя R9R10. На выходе компаратора формируются прямоугольные импульсы постоянной длительности (рис. 2, график 4). Постоянная составляющая такой импульсной последовательности пропорциональна частоте следования импульсов, т.е. частоте вращения двигателя. Импульсная последовательность интегрируется с помощью цепочек R11R12C5 и R13C6. Постоянное напряжение, пропорциональное частоте вращения, поступает на пропорционально-интегрирующий регулятор, собранный на ОУ U1C. Для получения образцового напряжения применен регулируемый стабилитрон U2. Нужную частоту вращения устанавливают регулировкой этого напряжения с помощью переменного резистора R19. Выход ОУ U1C умощнен комплементарным эмиттерным повторителем на транзисторах VT1VT2. Казалось бы, направление тока питания двигателя всегда одно и то же и достаточно было бы одиночного эмитерного повторителя, который обеспечивал бы вытекающий ток. Но на самом деле с двухтактным эмиттерным повторителем гораздо лучше поведение системы во время переходных процессов (при пуске двигателя или при резких колебаниях нагрузки на валу) [2].
Рис.2. Форма сигналов в контрольных точках.
Нужно отдельно остановиться на проблеме устойчивости системы автоматического регулирования. В данной ситуации дело усложняется тем, что на устойчивость влияют и механические параметры системы, которые количественно учесть очень трудно. Поэтому в некоторых случаях придется подобрать АЧХ регулятора с помощью элементов R16C7 или даже ограничить коэффициент усиления, включив параллельно этой цепочке резистор. Подбор нужно вести по критерию устойчивости регулятора как в установившемся режиме, так и во время переходных процессов. Для этого нужно с помощью осциллографа контролировать напряжение питания двигателя. При включении оно должно плавно достичь номинального значения, причем без колебательного процесса. Если при работающем двигателе изменить нагрузку на валу, напряжение питания также должно принять новое значение без колебательного процесса. В регуляторе вместо LM324 можно применить практически любые ОУ, например, LM2902, или сдвоенные LM358, LM2904, или даже обычные KP140УД6, УД7. В зависимости от потребляемого двигателем тока может понадобиться установить транзистор VT1 на теплоотвод. Транзистор VT2 теплоотвода не требует.
Литература:
1. З. Гасымов. Стабилизатор частоты вращения электродвигателя. Радио, №12, 1987 г., стр. 48.
2. В. Псурцев. Модернизация ЭПУ G-602. Радиоежегодник, 1987 г., стр. 132 – 140.
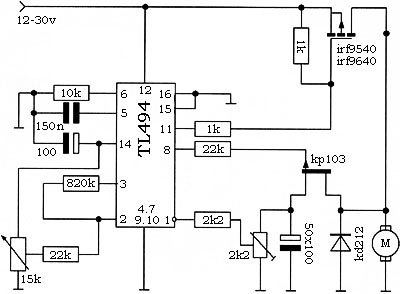
Стабилизатор оборотов коллекторного двигателя 12В
Схема стабилизатора оборотов (как и другие аналогичные) основана на получении сигнала, пропорционального частоте вращения
Основных отличий два:
— для выделения напряжения пропорционального частоте вращения якоря используется мостовая схема, которая позволяет выделять напряжение противо-ЭДС ротора, пропорциональное скорости вращения
Далее полученное напряжение Uoc можно использовать для обратной связи по сути любого источника питания.
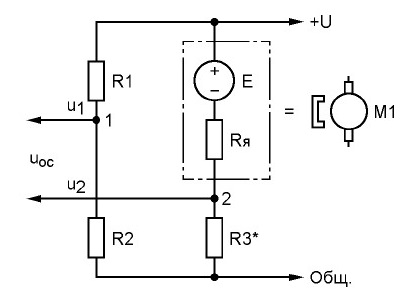
В описываемой схеме мост выглядит следующим образом
При соблюдении пропорции R1/R2 = R3/Rя (Rя — сопротивление якоря) и при Uос = 0 — мы получим компенсацию Rя и соответственно Е противо-ЭДС ротора будет равно напряжению стабилизации VD1
Если VD1 сделать регулируемым, то, по сути, меняя напряжение его стабилизации, мы меняем напряжение непосредственно на роторе двигателя (скомпенсировав влияние Rя) и обеспечиваем стабильность скорости вращения.
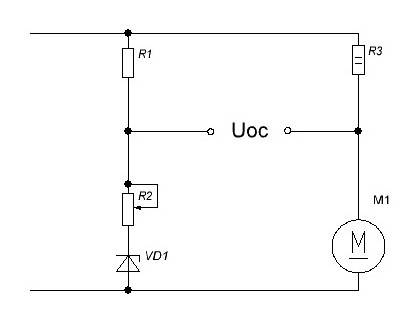
В данном случае за основу была взята TNY268P в стандартной схеме включения (по даташиту)
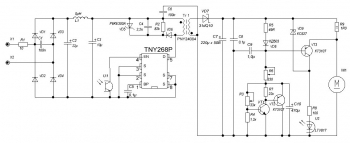
Левая от трансформатора часть схемы — стандартная обвязка TNY268 (может быть по сути использована за основу любая конструкция ИБП с максимально широким диапазоном выходного напряжения (этот диапазон определяет диапазон изменения скорости ротора) и требуемой мощностью.
В правой части схемы собственно мост образуют резисторы R5, R6 и R9 (аналогично R1, R2 и R3 на схеме на среднем рисунке).
VT1, VT2 и обвязка из резисторов R3, R4, R7 образуют аналог стабилитрона с регулируемым напряжением стабилизации (можно заменить на TL431).
Собственно Uос появляется между базой и эмиттером VT3, который управляет током светодиода в оптопаре U2, создавая обратную связь.
VD8 введен как компенсатор напряжения база-эмиттер VT3. Емкости C9 и C10 придаю стабильность узлу обратной связи.
Стабилитрон VD9 ограничивает максимальное напряжение на выходе источника питания и, при наличии встроенной защиты от перенапряжения, не нужен.
При подготовке схемы под конкретную модель электродвигателя возможно номинал R5 будет другим (для соблюдения пропорции R5/(0,7*R6) = R9/Rя. Падение напряжения на R9 при номинальном потребляемом токе должно быть около 1В, больше нежелательно — будет сильно греться.
При настройке подстроечным резистором R6 выбираем нужную степень обратной связи, притормаживая двигатель рукой и делая им обороты, наиболее близкие к оборотам без нагрузки, но в то же время не допуская «подергиванием» якоря без нагрузи.
Схема показала хорошую повторяемость, работает как для польской электродрели / шлифовалки 12В Pegasus (вот такой) и работала с другим моторчиком на 24В.
Обороты регулируются от 500 до 12000 об/мин с очень хорошей стабильностью (рукой трудно удержать). Элементы греются незначительно — в основном R9.
Подборка схем регулятора оборотов двигателя постоянного тока
Производить регулировку скорости вращения вала коллекторного электродвигателя, имеющего малую мощность, можно подсоединяя последовательно в электроцепь его питания резистор. Но данный вариант создает очень низкий КПД, и к тому же отсутствует возможность осуществлять плавное изменение скорости вращения.

Основное, что этот способ временами приводит к полной остановке электродвигателя при низком напряжении питания. Регулятор оборотов электродвигателя постоянного тока, описанные в данной статье, не имеют эти недостатки. Данные схемы можно с успехом применять и для изменения яркости свечения ламп накаливания на 12 вольт.
Описание 4 схем регуляторов оборотов электродвигателя
Первая схема
На транзисторе VT1 (однопереходном) реализован генератор пилообразного напряжения (частота 150 Гц). Операционный усилитель DA1 играет роль компаратора, создающего ШИМ на базе транзистора VT2. В результате получается ШИМ регулятор оборотов двигателя.

Изменяют скорость вращения переменным резистором R5, который меняет длительность импульсов. Так как, амплитуда ШИМ импульсов постоянна и равна напряжению питания электродвигателя, то он никогда не останавливается даже при очень малой скорости вращения.
Вторая схема
Она схожа с предыдущей, но в роли задающего генератора применен операционный усилитель DA1 (К140УД7).

Этот ОУ функционирует как генератор напряжения вырабатывающий импульсы треугольной формы и имеющий частоту 500 Гц. Переменным резистором R7 выставляют частоту вращения электродвигателя.
Третья схема
Она своеобразная, построена на она на популярном таймере NE555. Задающий генератор действует с частотой 500 Гц. Ширина импульсов, а следовательно, и частоту вращения двигателя возможно изменять от 2 % до 98 %.

Слабым местом во всех вышеприведенных схемах является, то что в них нет элемента стабилизации частоты вращения при увеличении или уменьшении нагрузки на валу двигателя постоянного тока. Разрешить эту проблему можно с помощью следующей схемы:

Как и большинство похожих регуляторов, схема этого регулятора имеет задающий генератор напряжения, вырабатывающий импульсы треугольной формы, частота которых 2 кГц. Вся специфика схемы — присутствие положительной обратной связи (ПОС) сквозь элементы R12,R11,VD1,C2, DA1.4, стабилизирующей частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
При налаживании схемы с определенным двигателем, сопротивлением R12 выбирают такую глубину ПОС, при которой еще не случаются автоколебания частоты вращения при изменении нагрузки.
Детали регуляторов вращения электродвигателей
В данных схемах возможно применить следующие замены радиодеталей: транзистор КТ817Б — КТ815, КТ805; КТ117А возможно поменять КТ117Б-Г или 2N2646; Операционный усилитель К140УД7 на К140УД6, КР544УД1, ТL071, TL081; таймер NE555 — С555, КР1006ВИ1; микросхему TL074 — TL064, TL084, LM324.
При использовании более мощной нагрузки, ключевой транзистор КТ817 возможно поменять мощным полевым транзистором, например, IRF3905 или ему подобный.
Схема стабилизатора частоты вращения двигателя

По вопросам ремонта и другим техническим вопросам сюда. Ремонт бытовой и офисной техники.
Стабилизатор оборотов двигателя для полуавтомата второй сезон. Кубань Краснодар.
В журнале «Электрик», 3-4 номер за 2006 год, в рубрике «Инженерные решения» была опубликована простая на первый взгляд схема регулятора подачи сварочной проволоки на завоевавшей в те года популярность микросхеме TL494, автор В. П. Оноприч.
С первого взгляда бросается в глаза красота, техничность и простота конструкции, насколько все в этой схеме логично и продумано, нет ничего лишнего. Схем такого уровня встречается единицы. Ценность заложенного в нее конструкторского решения состоит в применении, для стабилизации оборотов электродвигателя, синхронного детектора. Это равносильно использованию в обратной связи, датчика оборотов двигателя, потому что возникающая индукционная ЭДС на контактах электродвигателя при отключении питания прямо пропорциональна частоте вращения ротора. Такой метод стабилизации оборотов ценен тем, что дает возможность наиболее полноценно использовать силовые возможности двигателя, потому что он не ограничивает ни ток потребления, ни напряжение питания. Если растет нагрузка на вал двигателя, то обороты поддерживаются ростом напряжения и тока до максимально возможных значений, которые может обеспечить блок питания, таким образом, используются все технические возможности двигателя.
В сочетании со специализированной микросхемой с большими функциональными возможностями эта схема выглядит еще более привлекательней. TL494 это практически специализированный микроконтроллер для полумостовых схем блоков питания, только непрограммируемый. Ее применение позволило получить максимально простое, малогабаритное устройство с очень хорошими характеристиками и повторяемостью.
Данная микросхема выпущена на рынок в 1986 году, однако широко используется и сегодня, так как сочетает высокую точность, простоту и дешевизну.
Микросхема TL494 представляет ШИМ контролер импульсного источника питания, работающий на фиксированной частоте, который включает в себя все необходимые для этого блоки. Встроенный генератор пилообразного напряжения требует для установки частоты только двух внешних компонентов R и С. Частота генератора определяется по формуле:
F=1.1/(RC) , где F — в Кило Герцах, R — в Кило Омах, С — в Микро Фарадах.
Например, рассчитаем частоту выходного каскада приведенной выше схемы.
Для стабилизаторов с таким включением регулирующего полевого транзистора частоту переключения следует выбирать в районе 500 — 1000 Герц.
- Полный набор функций ШИМ-управления
- Выходной втекающий или вытекающий ток каждого выхода …..200мА
- Возможна работа в двухтактном или однотактном режиме
- Встроенная защитная зона
- Широкий диапазон регулировки
- Выходное опорное напряжение…………………………………….5В +-05%
- Просто организуемая синхронизация
Общее описание 1114ЕУ3/4 – TL494.
Специально созданные для построения импульсных блоков питания, микросхемы TL493/4/5 обеспечивают разработчику расширенные возможности при конструировании. Приборы TL493/4/5 включают в себя усилитель ошибки, встроенный регулируемый генератор, компаратор регулировки мертвого времени, триггер управления, прецизионный ИОН на 5В и схему управления выходным каскадом. Усилитель ошибки выдает синфазное напряжение в диапазоне от -0,3…5В. Компаратор регулировки мертвого времени имеет постоянное смещение, которое ограничивает минимальную длительность мертвого времени величиной порядка 5%.
Допускается синхронизация встроенного генератора, при помощи подключения вывода R к выходу опорного напряжения и подачи входного пилообразного напряжения на вывод С, такое включение используется при синхронной работе нескольких схем ИБП.
Независимые выходные формирователи на транзисторах обеспечивают возможность работы выходного каскада по схеме с общим эмиттером либо по схеме эмиттерного повторителя. Выходной каскад микросхем TL493/4/5 работает в однотактном или двухтактном режиме, есть возможность выбора режима с помощью специального входа. Микросхема имеет защитную зону двухтактного выхода.
Приборы, имеющие суффикс L, гарантируют нормальную работу в диапазоне температур —5…85С, с суффиксом С гарантируют нормальную работу в диапазоне температур 0…70С.
Применение микросхем серии 494 и им подобных уже является правилом, но сочетание синхронного детектора с TL494, да и использование его в других схемах, пока встречается очень редко. А жаль. Современные технологии и компоненты уже давно позволяют с минимальным усложнением конструкций применять синхронные преобразователи на каждом шагу, начиная от выпрямителей напряжения, вместо диодных мостов. Они существенно повышают КПД электронных устройств и расширяют их технические возможности, примером можно привести выше изложенную схему стабилизатора оборотов двигателя.
В схеме устранены допущенные неточности и добавлены минимальные доработки.
- Полевые транзисторы серии КП 103 не все имеют P-N структуру с P каналом, точнее только КП103К, КП103Л, КП103М, все остальные типы приборов этой серии имеют P-N структуру с N каналом и не могут быть применены в этой схеме.
- В полевых транзисторов серии КП 103 максимальное напряжение сток — исток 10 -12 Вольт. При питающем напряжении 12-28 вольт эти транзисторы применять не желательно.
- В схеме средняя стрелка выходного транзистора должна быть соединена с истоком.
- В схеме транзистор выходного каскада микросхемы — ножка 11, работает по схеме с открытым коллектором — сопротивление R8. Для создания одинаковых режимов работы ключевых транзисторов в обоих каналах, второй транзистор — ножка 8 выходного каскада микросхемы, то же включен по схеме с открытым коллектором.
- В связи со слабой чувствительностью входов усилителей сигнала ошибки tl494, резистор обратной связи можно не ставить. Но для уменьшения влияния наводок и повышения плавности вращения вала двигателя на малых оборотазх, можно между ножками 2 и 3, микросхемы, поставить керамический конденсатор емкостью 0,1 мкФ.
- В выходном каскаде вместо IRF9640 лучше применить IRF9540, в последних у два раза больше выходной ток и гораздо меньше сопротивление открытого канала сток — исток.
- Для коммутации выбранного типа полевых транзисторов, необходимо включить выходной каскад микросхемы по схеме с открытым коллектором. Следовательно, на выводы 8 и 11 нужно подключить дополнительные резисторы, относительно плюсового провода и подать управляющие сигналы на затворы транзисторов через токоограничительные резисторы сопротивлением 20 Ом, согласно с техническими требованиями для этих транзисторов.
- Всвязи с высоким напряжением питания, для создания оптимальных условий синхронного детектирования, в канале регулировки и канале синхронного детектора применены одинаковые транзисторы.
- Для повышения надежности и коэффициента стабилизации, питание микросхемы TL494 стабилизировано на уровне 12 — 16 вольт стабилитроном Д814Д. В этих стабилитронах наименьшее дифференциальное сопротивление, это обеспечило максимальное подавление пульсаций простыми схемотехническими методами.
Подробнее о дифференциальном сопротивлении стабилитронов и использования их особенностей на практике описано в статье
После учета перечисленных пунктов, получилась схема, не уступающая по параметрам авторской, а по некоторым пунктам превосходящая их.
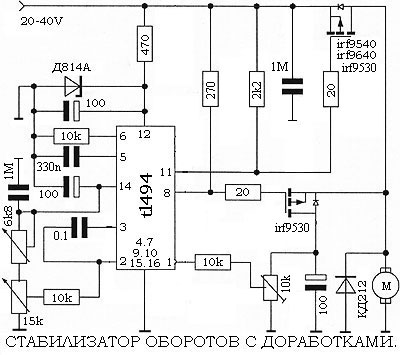
Фото готового изделия.
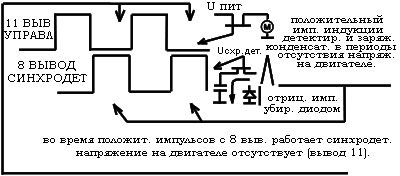
Работа синхронного детектора стабилизатора оборотов двигателя.
Стабилизация оборотов электродвигателя импульсным методом происходит путем периодической подачи на двигатель импульсов напряжения. Не путем плавной регулировки напряжения, а подачей всего напряжения, но частыми короткими импульсами. При этом для поддержания стабильных оборотов, достаточно регулировать частоту или длительность импульсов подаваемого напряжения, тем самым, импульсным методом регулируя количество энергии переданной двигателю, а инерционность двигателя сгладит переходные процессы.
При импульсной стабилизации всегда существуют моменты, когда на двигатель не подается напряжение питания. В эти моменты на его клеммах происходит выброс напряжения индукции, которое прямо пропорционально количеству оборотов. Это напряжение индукции преобразуется методом синхронного детектирования в постоянное, которое поступает на усилитель обратной связи. При таком методе детектирования периоды работы детектора должны быть синхронизированы сигналом управления.
Измерительный процесс можно посмотреть на графике работы синхронного детектора.
Микросхема TL494 имеет двухтактный выход. Это значит что выходные сигналы противофазные. В моменты времени, когда открыт один выходной транзистор, другой всегда закрыт, то есть обеспечивается синхронность работы двух каналов. Это уже готовое решение к применению синхронного детектора. Когда питающий ключ закрыт — вывод 11, на выводе — 8 присутствует положительный импульс, открывающий ключ синхронного детектора. Ключ детектора открывается в моменты времени, когда двигатель обесточен, возникающее в эти промежутки напряжение индукции, через открытый транзистор, заряжает измерительный конденсатор. На конденсаторе накапливается, и сохранятся напряжение заряда, а величина емкости сглаживает импульсную составляющую и обеспечивает плавность изменения напряжения. Напряжение с измерительного конденсатора поступает в инверсный линейный канал обратной связи микросхемы, получается плавный регулятор оборотов. При увеличении напряжения на измерительном конденсаторе — уменьшается напряжение на клеммах двигателя и наоборот.
Транзистор для синхронного детектора.
В синхронном детекторе можно применять как биполярные, так и полевые транзисторы, с внутренним диодом и без него. Полевые транзисторы лучше использовать с изолированным затвором — МДП транзисторы. МДП структура это металл — диэлектрик — полупроводник. То же самое МОП транзисторы, металл — оксид — полупроводник.
По структуре и принципу действия МДП транзисторы имеют более высокую температурную стабильность и значительно надежнее защищены от перегрузок по току, потому что при повышении температуры внутреннее сопротивление транзистора повышается.
Структура МДП транзисторов является симметричной. У них вход и выход можно менять местами, характеристики приборов при этом останутся неизменными. Поэтому, если в синхронном детекторе применить МДП транзистор с внутренним диодом, то включать такой транзистор нужно так, чтобы больший положительный потенциал цепи питания электродвигателя не проходил в цепь измерительного конденсатора. Если посмотреть на процесс заряда с другой стороны, то наличие диода, при правильном включении транзистора, даст ускорение реакции схемы на один период рабочей частоты, при резкой потере оборотов валом двигателя. При потере оборотов, на двигателе будет сразу напряжение меньше, чем на измерительном конденсаторе, диод откроется, и конденсатор быстро разрядится до напряжения цепи двигателя, что мгновенно, не дожидаясь фазы включения синхронного детектора, приведет к увеличению напряжения стабилизации.
Повышение мощности стабилизатора.
В р-канальных транзисторах протекание тока осуществляется за счет движения неосновных носителей заряда — положительно заряженных дырок. Это намного снижает быстродействие Р-канального транзистора по сравнению с N-канальным и повышает его сопротивление в открытом состоянии. К тому же, при одинаковых токах стока, Р-канальные транзисторы имеют значительно большую площадь кристалла, а значит и цену.
По этим причинам полевые транзисторы с Р каналом имеют малый ассортимент для выбора, имеют ограниченную мощность и реже применяются, поэтому не везде их можно купить особенно это касается мощных экземпляров.
Для увеличения мощности лучше применять полевые транзисторы с N каналом. В транзисторах с N каналом протекание тока осуществляется за счет движения основных носителей заряда — отрицательно заряженных электронов. Поэтому транзисторы с N каналом имеют в десятки раз больший выбор номиналов и такой же рейтинг применяемости. Мощность этих транзисторов практически не ограничена, без труда можно выбрать подходящий экземпляр.
Поскольку полевой транзистор по управлению не токовый, а потенциальный прибор, ему необходимы схемы управления, рассчитанные для быстрого перезаряда входных емкостей затвора.
При выходном каскаде как в TL494, управлять полевым транзистором не рационально, и 200мА коллекторного тока не всегда достаточно для управления мощными транзисторами.
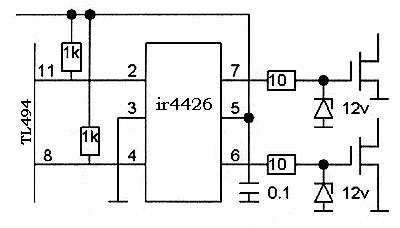
Вот варианты управления полевым транзистором с N каналом.
Конденсатор номиналам 1500 рФ это емкость затвора, на самом деле емкость затвора это динамическая величина. Она велика при малых напряжениях и быстро уменьшается при больших.
Чтобы открыть полевой транзистор нужно быстро зарядить его входную емкость до напряжения насыщения 8 — 12 Вольт. Чтобы закрыть — быстро разрядить входную емкость до напряжения отсечки. Главная задача схемы управления сделать этот процесс достаточно быстрым.
На рисунке приведен ряд схем управления затвором полевого транзистора. Первая – схема с общим эмиттером, вторая — эмиттерный повторитель и третья, комплементарный повторитель – внизу. Каждая имеет свои преимущества и недостатки.
По сигналу управления видно, что лучший вариант управления это последний — внешний комплементарный повторитель. При таком варианте управления сильно сокращаются переходные процессы в моменты открывания и закрывания. Это увеличивает КПД, повышает надежность работы и уменьшает тепловые потери. Резистор в цепи затвора ограничивает скорость переходных процессов до безопасной для транзистора величины.
Еще более лучший вариант, это применять для управления полевыми транзисторами специализированные драйвера. В них с помощью дополнительной емкости реализовано динамическое управление затвором. Это позволяет получить оптимальный режим коммутации, оптимизировать скорость нарастания и скорость спада управляющего импульса, что позволяет добиться максимально короткого времени срабатывания.
Скорость нарастания и спада управляющих импульсов должна быть не слишком большой и не слишком маленькой.
Укорочение фронтов и спадов управляющих импульсов приводит к перегрузкам канала управления и самого транзистора. Это следствие эффекта Миллера.
Рабочие процессы полевых транзисторов с изолированным затвором, зарубежные названия MOSFET и IGBT транзисторы, очень хорошо описаны в статье «Разработка и применение высокоскоростных схем управления силовыми полевыми транзисторами».
«Разработка и применение высокоскоростных схем управления силовыми полевыми транзисторами».
Как раз то, что нужно, изучите, не пожалеете!
Несколько слов об эффекте Миллера.
В полевом транзисторе существуют взаимосвязанные технологические емкости Затвор — Сток, Затвор — Исток, Затвор — Подложка. При коммутации, на емкость Затвор — Подложка, влияют емкости Затвор — Сток и Затвор — Исток.
Эффект Миллера, это влияние на емкость затвора емкостей стока и истока.
В итоге, затягивание фронтов и спадов управляющих импульсов значительно увеличивает коммутационные потери и может вызвать большие паразитные всплески напряжения, вызываемые перезарядом емкости стока, особенно это опасно для высоковольтных транзисторов.
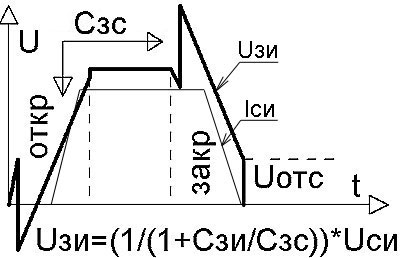
Приблизительно, без учета влияния входных цепей, оценить напряжение на затворе при перезаряде внутритразисторных емкостей можно по формуле соотношений емкостей или зарядов.
Если соотношение Qз/Qзс=4/1, а Uси=250v, то по формуле получим Uзи=50v.
В данном случае расчетное значение напряжения Uзи, по этой формуле превышает паспортное значение, тогда при расчете цепей управления нужно применить следующие меры.
Поставить в цепи управления более мощные, с малым выходным сопротивлением и токами насыщения ключи.
Применить более мощный, или с малым внутренним сопротивлением — это одно и то же, источник питания цепей затвора.
Сопротивление омного резистора в цепи управления затвора должно быть в районе 20-50 Ом, и не превышать рекомендованные производителем номиналы.
Все эти опасные моменты автоматически исключаются при применении специализированных драйверов управления затворами полевых транзисторов. А при самостоятельном расчете схем управления нужно помнить, что в ключевых схемах именно в переходные моменты наиболее негативно сказываются на работе и существенно понижают рабочие параметры и строки службы узлов.
Приблизительно оценить увеличение входного заряда и емкости транзистора из — за эффекта Миллера можно по формуле.
Относительно входных емкостей.
Кu = Uвых/Uвх = Uс/Uз = SRн — коэффициент усиления.
Или относительно входных зарядов.
Кu = Uвых/Uвх = Uс/Uз = SRн — коэффициент усиления.
S — крутизна характеристики, она же Gfs — Forvard Transconductance — зависимость тока стока от напряжения на затворе. Измеряется в А/В (Ампер на Вольт). Для расчета крутизны характеристики часто приводится графики.
Рассчитаем увеличение заряда на примере транзистора IRF540, Rн = 3 Ома.
30=346 – более чем в 100 раз.
Подробнее об эффекте Миллера можно прочитать в статье
По параметрам справочных данных можно приблизительно рассчитать величины не только внутренних емкостей и зарядов. Вот ряд формул, необходимых для расчетов.
t=CR — постоянная времени интегрирования и дифференцирования.
При расчетах режимов управления полевыми транзисторами, лучше пользоваться величинами входных зарядов, а не величинами входных емкостей. Ток заряда RC цепи изменяется нелинейно, по экспоненциальному закону, поэтому для точности расчетов надо брать параметр «Заряд конденсатора», так называемый показатель интегральной характеристики процессов.
Заряд затвора приводится в документации на все транзисторы в качестве обязательного параметра и обозначается Qg, измеряется в нано Кулонах (nC). При этом, должны быть указаны режимы транзистора, при которых производились замеры.
Обычно в документации на транзисторы указываются три типа зарядов.
Общий заряд затвора.
Заряд затвор – исток.
Заряд затвор – сток, он же создающий эффект Миллера.
Например, для транзистора IRF9540 мы имеем.
Q(g) (Total Gate Charge) — 61nC, при I(d)=19A; V(ds)=80V; V(gs)=10V.
Q(gs) (Gate-to-Source Charge) — 14nC, при I(d)=19A; V(ds)=80V; V(gs)=10V.
Q(gd) (Gate-to-Gain «Miller» Charge) — 29nC, при I(d)=19A; V(ds)=80V;
V(gs)=10V.
Если применять в качестве силового элемента полевой транзистор, необходимо знать какие токи будут коммутировать транзисторы управляющего каскада.
Приблизительный расчет режимов управления может быть следующим.
Возьмем транзистор IRF540. У него полный заряд затвора 40нК, при 10v на затворе, 80v на стоке и 30А на нагрузке.
Q(g) (Total Gate Charge) — 40nC, при I(d)=30A; V(ds)=80V; V(gs)=10V.
Q(gs) (Gate-to-Source Charge) — 6nC, при I(d)=30A; V(ds)=80V; V(gs)=10V.
Q(gd) (Gate-to-Gain «Miller» Charge) — 10nC, при I(d)=30A; V(ds)=80V;
V(gs)=10V.
Рассчитаем время включения / выключения.
Рассчитаем величину заряда затвора от эффекта Миллера по формуле.
где Ку=SRн, коэффициент усиления = крутизна ВАХ * Rн.
S — крутизна характеристики, она же Gfs — Forvard Transconductance — зависимость тока стока от напряжения на затворе. Измеряется в А/В (Ампер на Вольт). Для расчета крутизны характеристики часто приводятся графики.
Чем круче прямая S, тем больший Ку.
В полевых транзисторах длительность коммутационных процессов прямо пропорциональна сопротивлению нагрузки. Для определения Rн, необходимо определить, какие двигатели могут подключаться к стабилизатору.
Этот стабилизатор предназначен для двигателя подачи сварочной проволоки. В качестве такого двигателя в сварочных полуавтоматах часто используется электродвигатели, предназначенные для дворников автомобиля.
У двигателя для дворников с рабочим напряжением 12v током потребления около 4А, внутреннее сопротивление около 0,8 Ом.
Сделаем запас на прочность, возьмем минимальное сопротивление нагрузки 2 Ом.
Рассчитаем эквивалент заряда затвора от эффекта Миллера на примере транзистора IRF540, Rн = 2 Ом.
От эффекта Миллера, на затворе будет заряд равный 270нКл, при нагрузке 2 Ом.
Рассчитаем время включения / выключения с учетом эффекта Миллера.
Tвкл=Tвыкл=(QзRз)/Uз, нано Кулоны необходимо перевести в Кулоны, nC=1*10^-9.
T=((270*10^-9)20)/12= 4500nS = 4,5 микросекунды.
Многовато будет, уменьшим сопротивление в управляющей цепи затвора до 10 Ом.
T=((270*10^-9)10)/12= 2300nS = 2,3 микросекунды.
Из длительности периодов можно определить максимально возможную рабочую частоту.
FкГц=1/(10(t*2)), или FкГц=1/(10(t1+t2)).
Из формулы пересчета периода в частоту имеем.
Найдем импульсные токи открытия / закрытия полевого транзистора.
270nC/2300ns=120mA — предполагаемый импульсный ток открытия / закрытия.
Проверим, какой величины будут максимально возможные паразитные импулсы на затворе.
Соотношение емкостей затвора можно приравнять к пропорциональным величинам его зарядов.
Если у нас Uзи = 12v, то прибавка в 10v терпима.
Для этой схемы Rз можно выбирать из других соображений, например, для ограничения импульсного тока управления.
Теперь перейдем к микросхеме TL494.
Рассчитаем частоту выходного сигнала TL494.
F=1.1/(RC), , где F — в Кило Герцах, R — в Кило Омах, С — в Микро Фарадах.
Смотрим какие характеристики минимального выходного импульса микросхемы TL494.
Output Voltage Rise Time 100ns — длительность открытия,
Output Voltage Fall Time 40ns — длительность закрытия.
Минимальная длительность рабочего импульса будет 140+40=140ns.
Переведем длительность импульса в частоту.
Частота будет 358кГц.
Типовая частота коммутирующих импульсов по паспортным данным — 40кГц.
Но нам нужно выбирать такую тактовую частоту задающего генератора, при которой длительность выходных самых коротких импульсов микросхемы не была бы меньше 2,3-2,5 микросекунды — минимальное время включения / выключения полевого транзистора с учетом эффекта Миллера. Больше можно.
При широтно — импульсной модуляции длительность управляющих импульсов меняется обычно в 10 раз. Если нет осциллографа, можно минимальное время импульса брать равное импульсу мертвой зоны. В TL494 рабочий импульс не может быть короче импульса мертвой зоны. Из характеристик микросхемы следует, что компаратор регулировки мертвого времени имеет постоянное смещение, которое ограничивает минимальную длительность мертвого времени величиной порядка 5%.
Для этого, максимальную частоту коммутации полевым транзистором, порядка 22 кГц, делим на 100 и множим на 5, получаем 1,1 кГц.
Частота 1,1 кГц есть 5% от максимально допустимой с учетом возможного укорочения импульса схемой ШИМ модуляции.
Для нормальной работы схемы стабилизатора, частота задающего генератора не должна превышать 1100 Гц. У нас 730 Гц.
Так как основная токовая нагрузка коммутируется внешними транзисторами, применяемые транзисторы должны быть быстродействующими, предназначены для работы в импульсных схемах, иметь достаточный запас по параметрах, малые токи насыщения.
Для удовлетворительной работы транзисторы внешнего комплементарного повторителя должны иметь многократный запас по параметрам. Следовательно, они должны иметь быстродействие не более 1нс, импульсный ток коллектора около 1,2А.
Например, транзисторы КТ644+646.
Разводка печатной платы должна быть выполнена с учетом минимизации емкости и индуктивности монтажа. Коллекторы транзисторов буферных каскадов, должны быть зашунтированы блокировочными керамическими конденсаторами, емкостью порядка 0,1 мкФ.
В качестве еще более мощного ключа можно применить полевые транзисторы IRFI1010, IRF2807.
Здесь еще раз стоит сказать, что при таких входных емкостях, лучше применять специализированные драйвера управления, особенно если управлять транзистором IRF2807.
Успеха в творчестве.
С ув. Белецкий А. И. 12.11.2011. Кубань Краснодар.







