Регулирование скорости путем шунтирования якоря
При шунтировании якоря (рис. 1.81) ток и поток возбуждения возрастают, а скорость уменьшается.
В силу того, что падение напряжения  мало, и можно считать
мало, и можно считать  , то сопротивление при шунтировании якоря
, то сопротивление при шунтировании якоря  будет находиться практически под полным напряжением сети и величина его должна быть значительной. Потери в нем будут велики, к.п.д. может сильно уменьшится.
будет находиться практически под полным напряжением сети и величина его должна быть значительной. Потери в нем будут велики, к.п.д. может сильно уменьшится.
Поэтому шунтирование якоря эффективно тогда, когда магнитная цепь не насыщена. На практике такой способ регулирования используется редко и при ограничениях на ток  .
.
Регулирование скорости включением сопротивления в цепь якоря
При включении сопротивления в цепь якоря (рис.1.81, в), к якорю подводится пониженное напряжения.
При этом скорость регулируется вниз от номинальной. Поскольку при этом велики потери  , которые пропорциональны квадрату току якоря, то этот способ регулирования применяется крайне редко.
, которые пропорциональны квадрату току якоря, то этот способ регулирования применяется крайне редко.
Выражение для скоростной характеристики получается путем замены  на
на 
 , (1.190)
, (1.190)
где  .
.
Регулирование скорости изменением напряжения
Этот способ позволяет изменять скорость вниз от номинальной с сохранением высокого к.п.д. Широко применяется в транспортных установках, в которых на каждой оси устанавливается отдельный двигатель и регулирование осуществляется путем переключения двигателей с параллельного включения в сеть на последовательное. При этом напряжение, подводимое к двигателям, уменьшается вдвое  .
.

Рис. 1.81. Схемы регулирования частоты вращения двигателя
последовательного возбуждения посредством
шунтирования обмотки возбуждения (а), шунтирования якоря
(б) и включения сопротивления в цепь якоря (в)

Рис. 1.82. Механические характеристики
Двигателя последовательного возбуждения
При разных способах регулирования частоты
Вращения (в относительных единицах)
Механические характеристики при  сопротивлении в о.е.
сопротивлении в о.е. 
а) механическим характеристикам 1, 2, 3 соответствует 
б) механическая характеристика 4 соответствует случаю  .
.
в) Механическая характеристика 5 соответствует в о.е.  .
.
г) Механическая характеристика 6 соответствует изменению напряжения в отношении 1:2 (рис. 1.82).

Рис. 1.83. Параллельное и последовательное включение двигателей
Последовательного возбуждения для изменения частоты вращения
Двигатели смешанного возбуждения.
Схема включения двигателя смешанного возбуждения представлена на рис. 1.84.

Рис. 1.84. Схема включения двигателя смешанного возбуждения
В двигателях смешанного возбуждения Фδ = Фш + Фс, встречное включение обмоток не допускается, так как работа двигателя при встречном включении последовательной обмотки неустойчива

Рис. 1.85. Естественные механические характеристики
Двигателей параллельного возбуждения (1),
Смешанного возбуждения с согласным
Включением последовательной обмотки (2),
Схемы шунтирования якоря двигателя постоянного тока с независимым возбуждением
 Наиболее благоприятные условия регулирования скорости двигателя с независимым возбуждением обеспечиваются изменением подведенного к якорной цепи напряжения Uя. Для автоматического регулирования скорости предусматривается питание якорной цепи от индивидуального управляемого преобразователя (системы Г-Д и ТП-Д). Однако при невысоких требованиях к точности и плавности регулирования в промышленных электроприводах используются резисторные схемы включения, получившие название схем шунтирования якоря.
Наиболее благоприятные условия регулирования скорости двигателя с независимым возбуждением обеспечиваются изменением подведенного к якорной цепи напряжения Uя. Для автоматического регулирования скорости предусматривается питание якорной цепи от индивидуального управляемого преобразователя (системы Г-Д и ТП-Д). Однако при невысоких требованиях к точности и плавности регулирования в промышленных электроприводах используются резисторные схемы включения, получившие название схем шунтирования якоря.
Потенциометрическая схема регулирования скорости двигателей с независимым возбуждением приведена на рис.8.4,а. При двигателе небольшой мощности потенциометр может быть выполнен в виде реостата с подвижным контактом, путем перемещения которого подведенное к двигателю напряжение можно изменять от 0 до Uя=Uном. Электромеханическая и механическая характеристики двигателя в этой схеме могут быть получены по аналогии с системой УП-Д, если рассматривать потенциометр как источник регулируемого напряжения с внутренней ЭДС, равной напряжению холостого хода:

и внутренним сопротивлением

Подставив (8.13) и (8.14) в (6.6), получим уравнения характеристик в потенциометрической схеме в следующем виде:


Из (8 16) следует, что при перемещении движка потенциометра скорость идеального холостого хода уменьшается пропорционально aш, а модуль жесткости статической характеристики

является переменной, зависящей от aш При aш=0 и aш=1 жесткость bш равна жесткости естественной характеристики двигателя р при питании его от бесконечно мощной сети. При промежуточных значениях aш модуль жесткости bm Iном. Наибольший ток шунтирующей части потенциометра Iшmax быстро увеличивается при уменьшении Rп, поэтому минимальная жесткость механических характеристик в рассматриваемой схеме ограничивается приемлемой мощностью потенциометра. Тем самым ограничивается и возможный при данных пределах изменения нагрузки и требуемой точности диапазон регулирования скорости.
Плавность регулирования при небольшой мощности двигателя, позволяющей использовать ползунковый реостат, получается достаточно высокой. Однако с возрастанием мощности двигателя эта возможность исключается и регулирование осуществляется переключением ступеней регулировочных сопротивлений Rш и Rдоб с помощью силовой коммутирующей аппаратуры. При таком регулировании принимать суммарное сопротивление потенциометра Rп=Rш+Rдоб постоянным нецелесообразно, так как сопротивления Rш и Rдоб могут регулироваться независимо. Для этого случая (8.15) и (8.16) удобно представить в виде

Следует иметь в виду, как изменяются характеристики двигателя при изменении Rш при неизменном Rдоб или наоборот. Примем сначала Rдоб=const и будем изменять в (8.19) Rш(aш).
При изменении сопротивления шунтирующего резистора от бесконечности до нуля скорость идеального холостого хода непрерывно уменьшается от w0ном до 0, а жесткость возрастает от bш=с 2 /(Rя+Rдоб) до bш=b. Все эти характеристики пересекаются в одной точке, в которой ток якоря двигателя имеет значение

при скорости в режиме противовключения

Это можно установить, определив напряжение на выводах якоря двигателя при Iя=Iк1 и w=wк1:

 Подставляя (8.22) в (8.23), убеждаемся, что в этой точке на выводах якоря напряжение равно нулю, так как ЭДС двигателя, работающего в генераторном режиме, равна падению напряжения на сопротивлении якоря. При любом сопротивлении Rш ток Iш в этой точке равен нулю, поэтому она является общей для всего рассматриваемого семейства характеристик (рис 8 5,а)
Подставляя (8.22) в (8.23), убеждаемся, что в этой точке на выводах якоря напряжение равно нулю, так как ЭДС двигателя, работающего в генераторном режиме, равна падению напряжения на сопротивлении якоря. При любом сопротивлении Rш ток Iш в этой точке равен нулю, поэтому она является общей для всего рассматриваемого семейства характеристик (рис 8 5,а)
Аналогичная общая точка обнаруживается и в семействе характеристик, соответствующем Rш=const и Rдо6=var (рис.8.5,б).
Все эти характеристики пересекаются в точке, где ток якоря определяется соотношением

а скорость имеет значение

В этой точке напряжение на выводах двигателя равно напряжению сети, поэтому ток из сети не потребляется и значение Rд не сказывается на условиях работы двигателя. Графически точка IK1, wK1 определяется пересечением реостатной характеристики при RЯS=Rя+Rдоб(Rш=¥) и естественной характеристики динамического торможения (Rш=0) (прямые 1 и 2 на рис.8.5,a).
Точка Iк2 и wк2 определяется пересечением естественной характеристики двигателя 3 (Rдоб=0) и реостатной характеристики динамического торможения 4 (Rдоб=¥), как показано на рис.8.5,б.
Таким образом, механические характеристики в схеме шунтирования якоря двигателя с независимым возбуждением являются характеристиками двигателя, питаемого от источника регулируемого напряжения с относительно большим и изменяющимся при регулировании напряжения внутренним сопротивлением.
 studopedia.org — Студопедия.Орг — 2014-2021 год. Студопедия не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования (0.002 с) .
studopedia.org — Студопедия.Орг — 2014-2021 год. Студопедия не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования (0.002 с) .
3.8. Регулирование скорости дпт независимого возбуждения в схеме с шунтированием якоря
Для регулирования скорости ДПТ независимого возбуждения применяется схема с шунтированием якоря, показанная на рис. 3.30. Эта схема позволяет с помощью двух добавочных резисторов–Rш,включаемого параллельно якорю, иRп,включаемого последовательно с якорем, получать
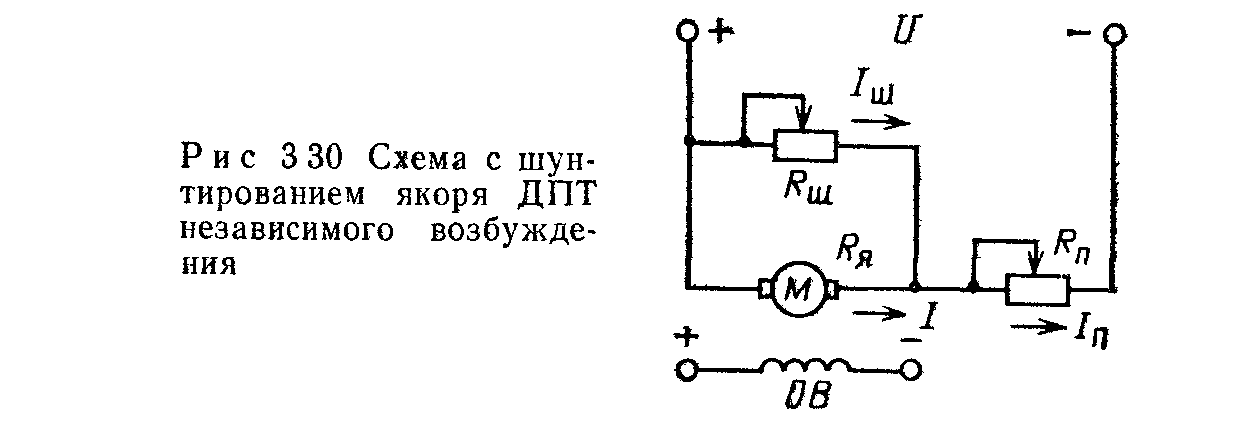
сравнительно жесткие характеристики в области малых скоростей ДПТ. Такие характеристики требуются, например, для электроприводов подъемных кранов и лифтов.
Уравнения характеристик ДПТ в схеме рис. 3.30 могут быть получены на основании выражений для ЭДС (3.2) и момента (3.3) ДПТ и следующих соотношений:
 (3.57)
(3.57)
 (3.58)
(3.58)
 (3.59)
(3.59)
Заменяя в (3.57) и (3.58) ток Iпна его выражение из (3.59), а затем исключая из полученных двух уравненийIш, получаем следующие выражения соответственно для электромеханической и механической характеристик:
 (3.60)
(3.60)
 (3.61)
(3.61)
где 
Из (3.60) и (3.61) видно, что в схеме с шунтированием якоря снижается скорость идеального холостого хода и падает жесткость характеристик по сравнению с основной схемой включения ДПТ. Это объясняется тем, что в схеме рис 3.30 напряжение ДПТ меньше напряжения источника питания, а в якорной цепи находится добавочный резистор Rп. По этой причине способ регулирования скорости в схеме с шунтированием якоря часто называют комбинированным, так как он сочетает в себе регулирование изменением напряжения и реостатное регулирование.
Семейство искусственных характеристик ДПТ в схеме рис. 3.30 при постоянном Rши регулируемомRпприведено на рис. 3.31.

Общая для данного RшточкаA1пересечения всех характеристик соответствует режиму работы ДПТ, когда он не потребляет ток из сети, в силу чего резисторRпне оказывает влияния на характеристики ДПТ. В этой точке ЭДС ДПТ уравновешивает напряжение сети и внутреннее падение напряжения в якоре, т. е.

Двигатель работает в режиме динамического торможения с током I1=U/Rш1. При измененииRш,например при его увеличении, общей точкой становится точкаA2, также располагающаяся на естественной характеристике.
Семейство искусственных характеристик ДПТ при постоянном Rпи регулируемомRшприведено на рис. 3.32. Пересечение характеристик происходит в точкеВ1,которая является общей точкой для всех искусственных характеристик при данномRп.В точкеB1ЭДС ДПТ, изменив свой знак, компенсирует внутреннее падение напряжения в якоре, вследствие чего напряжение на якоре и, следовательно, наRшравно нулю, ток через резисторRш.не проходит, а ток через якорь определяется какI1=U/Rп1.При измененииRп,например при его увеличении, общей точкой характеристик становится точкаВ2,координата тока для которой определяется соотношениемI2=U/Rп2.
Рассмотренный способ регулирования скорости по своим характеристикам и показателям занимает промежуточное положение между способами, связанными с изменением напряжения на якоре и сопротивлением в цепи якоря. Диапазон регулирования скорости лежит в пределах 5 – 6, плавность регулирования определяется плавностью изменения сопротивления RшиRп. Регулирование скорости осуществляется вниз от основной при постоянном моменте нагрузки, жесткость получаемых искусственных характеристик относительно высокая в области малых скоростей.
Экономичность этого способа регулирования невысока из-за значительных потерь мощности в якорной цепи. По этой причине способ используется для регулирования скорости ДПТ небольшой мощности при кратковременной работе на пониженных скоростях.







