- ДПТ последовательного возбуждения
- Схема шунтирования обмотки якоря двигателя постоянного тока последовательного возбуждения
- 2. механические характеристики при шунтировании обмотки возбуждения и обмотки якоря
- Вопрос 38. Регулирование скорости двигателя постоянного тока последовательного возбуждения шунтированием якоря резистором.
ДПТ последовательного возбуждения

В этом двигателе обмотка возбуждения включена последовательно в цепь якоря (рис. 29.9, а), поэтому магнитный поток Ф в нем зависит от тока нагрузки I = Ia = Iв. При небольших нагрузках магнитная система машины не насыщена и зависимость магнитного потока от тока нагрузки прямо пропорциональна, т. е. Ф = kф Ia (kф — коэффициент пропорциональности). В этом случае найдем электромагнитный момент:


Формула частоты вращения примет вид
На рис. 29.9, б представлены рабочие характеристики M = F(I) и n= (I) двигателя последовательного возбуждения. При больших нагрузках наступает насыщение магнитной системы двигателя. В этом случае магнитный поток при возрастании нагрузки практически не изменяется и характеристики двигателя приобретают почти прямолинейный характер. Характеристика частоты вращения двигателя последовательного возбуждения показывает, что частота вращения двигателя значительно меняется при изменениях нагрузки. Такую характеристику принято называть мягкой.

Рис. 29.9. Двигатель последовательного возбуждения:
а — принципиальная схема; б — рабочие характеристики; в — механические характеристики; 1 — естественная характеристика; 2 — искусственная характеристика
При уменьшении нагрузки двигателя последовательного возбуждения частота вращения резко увеличивается и при нагрузке меньше 25% от номинальной может достигнуть опасных для двигателя значений («разнос»). Поэтому работа двигателя последовательного возбуждения или его пуск при нагрузке на валу меньше 25% от номинальной недопустима.
Для более надежной работы вал двигателя последовательного возбуждения должен быть жестко соединен с рабочим механизмом посредством муфты и зубчатой передачи. Применение ременной передачи недопустимо, так как при обрыве или сбросе ремня может произойти «разнос» двигателя. Учитывая возможность работы двигателя на повышенных частотах вращения, двигатели последовательного возбуждения, согласно ГОСТу, подвергают испытанию в течение 2 мин на превышение частоты вращения на 20% сверх максимальной, указанной на заводском щите, но не меньше чем на 50% сверх номинальной.
Механические характеристики двигателя последовательного возбуждения n=f(M) представлены на рис. 29.9, в. Резко падающие кривые механических характеристик (естественная 1 и искусственная 2) обеспечивают двигателю последовательного возбуждения устойчивую работу при любой механической нагрузке. Свойство этих двигателей развивать большой вращающий момент, пропорциональный квадрату тока нагрузки, имеет важное значение, особенно в тяжелых условиях пуска и при перегрузках, так как с постепенным увеличением нагрузки двигателя мощность на его входе растет медленнее, чем вращающий момент. Эта особенность двигателей последовательного возбуждения является одной из причин их широкого применения в качестве тяговых двигателей на транспорте, а также в качестве крановых двигателей в подъемных установках, т. е. во всех случаях электропривода с тяжелыми условиями пуска и сочетания значительных нагрузок на вал двигателя с малой частотой вращения.
Номинальное изменение частоты вращения двигателя последовательного возбуждения
где n[0,25] — частота вращения при нагрузке двигателя, составляющей 25% от номинальной.
Частоту вращения двигателей последовательного возбуждения можно регулировать изменением либо напряжения U, либо магнитного потока обмотки возбуждения. В первом случае в цепь якоря последовательно включают регулировочный реостат Rрг (рис. 29.10, а). С увеличением сопротивления этого реостата уменьшаются напряжение на входе двигателя и частота его вращения. Этот метод регулирования применяют главным образом в двигателях небольшой мощности. В случае значительной мощности двигателя этот способ неэкономичен из-за больших потерь энергии в Rрг . Кроме того, реостат Rрг , рассчитываемый на рабочий ток двигателя, получается громоздким и дорогостоящим.
При совместной работе нескольких однотипных двигателей частоту вращения регулируют изменением схемы их включения относительно друг друга (рис. 29.10, б). Так, при параллельном включении двигателей каждый из них оказывается под полным напряжением сети, а при последовательном включении двух двигателей на каждый двигатель приходится половина напряжения сети. При одновременной работе большего числа двигателей возможно большее количество вариантов включения. Этот способ регулирования частоты вращения применяют в электровозах, где установлено несколько одинаковых тяговых двигателей.
Изменение подводимого к двигателю напряжения возможно при питании двигателя от источника постоянного тока с регулируемым напряжением (например, по схеме, аналогичной рис. 29.6, а). При уменьшении подводимого к двигателю напряжения его механические характеристики смещаются вниз, практически не меняя своей кривизны (рис. 29.11).

Рис. 29.11. Механические характеристики двигателя последовательного возбуждения при изменении подводимого напряжения
Регулировать частоту вращения двигателя изменением магнитного потока можно тремя способами: шунтированием обмотки возбуждения реостатом rрг, секционированием обмотки возбуждения и шунтированием обмотки якоря реостатом rш. Включение реостата rрг, шунтирующего обмотку возбуждения (рис. 29.10, в), а также уменьшение сопротивления этого реостата ведет к снижению тока возбуждения Iв = Ia — Iрг, а следовательно, к росту частоты вращения. Этот способ экономичнее предыдущего (см. рис. 29.10, а), применяется чаще и оценивается коэффициентом регулирования
Обычно сопротивление реостата rрг принимается таким, чтобы kрг >= 50%.
При секционировании обмотки возбуждения (рис. 29.10, г) отключение части витков обмотки сопровождается ростом частоты вращения. При шунтировании обмотки якоря реостатом rш (см. рис. 29.10, в) увеличивается ток возбуждения Iв = Ia+Iрг, что вызывает уменьшение частоты вращения. Этот способ регулирования, хотя и обеспечивает глубокую регулировку, неэкономичен и применяется очень редко.

Рис. 29.10. Регулирование частоты вращения двигателей последовательного возбуждения.
Схема шунтирования обмотки якоря двигателя постоянного тока последовательного возбуждения
Название: Синхронная машина — Учебное пособие (Н.М. Гераскина, Э.Е. Савилова, В.А. Тюков)

2. механические характеристики при шунтировании обмотки возбуждения и обмотки якоря
Шунтирование обмотки возбуждения вызывает ослабление поля возбуждения двигателя. Этот способ является экономичным и допускает плавное регулирование. Так как способ связан с увеличением тока якоря, а по условиям нагрева нельзя допускать ток якоря выше номинального в течение длительного времени, то регулирование частоты вращения уменьшением магнитного потока осуществляется при постоянной мощности и переменном моменте.
При шунтировании обмотки якоря увеличивается ток и поток возбуждения, а частота вращения уменьшается. Регулирование сопровождается большими потерями на шунтирующем сопротивлении, т.е. происходит при низком к.п.д. По условиям нагрева длительное превышение тока обмотки возбуждения недопустимо, поэтому регулирование рекомендуется производить также при постоянстве мощности.
По данным табл.6.2 на одном графике строятся зависимости для всех коэффициентов шунтирования обмотки возбуждения и обмотки якоря (рис.6.3).

Рис.6.3. Механические характеристики двигателя
последовательного возбуждения при шунтировании
обмотки возбуждения и обмотки якоря
По данным той же табл.6.2 при заданном значении тока якоря, то есть при постоянной мощности на валу следует построить зависимость частоты вращения от тока возбуждения при постоянстве момента на валу. Построение этой кривой показано на рис.6.4. При построении взять .

Рис.6.4. Кривая зависимости частоты вращения от
Регулирование частоты вращения двигателя
изменением напряжения, подводимого к обмотке якоря
Регулирование частоты вращения при постоянном моменте
Снятые зависимости (табл.6.3) изобразить на рис.6.5.

Рис.6.5. Регулирование частоты вращения изменением
напряжения при постоянстве момента
Так как момент в процессе опыта поддерживается постоянным
то и величина тока якоря должна оставаться постоянной. Некоторое увеличение тока якоря с ростом напряжения связано с увеличением потерь в стали и механических потерь, зависящих от частоты вращения.
Частота вращения изменяется почти пропорционально напряжению
К.п.д. при практически остаётся постоянной величиной
Регулирование двигателя изменением напряжения при
постоянной частоте вращения
Снятые зависимости (табл.6.4) изобразить на одном рисунке (рис.6.6).
Из формулы при следует
Ток якоря в ненасыщенной машине при постоянной скорости пропорционален приложенному напряжению. При напряжениях, близких к номинальному, из-за насыщения магнитной цепи ток якоря резко возрастает.
Момент двигателя в зависимости от напряжения при постоянной скорости изменяется примерно по параболическому закону, т.к.

Рис.6.6. Регулирование двигателя изменением напряжения
при постоянной частоте вращения
Мощность на валу двигателя изменяется также, как и момент, т.к.
Регулирование двигателя при постоянстве частоты вращения при переменной нагрузке на валу происходит при неизменном к.п.д. двигателя
Вопрос 38. Регулирование скорости двигателя постоянного тока последовательного возбуждения шунтированием якоря резистором.
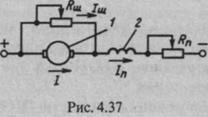 Регулирование скорости шунтированием якоря резистором используется для получения пониженных скоростей ЭП с ДПТПВ и определенной скорости его идеального холостого хода. Наибольшее распространение получила схема, в которой шунтирующий якорь 1 резистор Rш и последовательно включенный резистор Rп вместе с обмоткой возбуждения 2 образуют делитель напряжения. За счет этого к якорю двигателя подводится пониженное напряжение и его характеристики будут располагаться ниже естественной.
Регулирование скорости шунтированием якоря резистором используется для получения пониженных скоростей ЭП с ДПТПВ и определенной скорости его идеального холостого хода. Наибольшее распространение получила схема, в которой шунтирующий якорь 1 резистор Rш и последовательно включенный резистор Rп вместе с обмоткой возбуждения 2 образуют делитель напряжения. За счет этого к якорю двигателя подводится пониженное напряжение и его характеристики будут располагаться ниже естественной.
Особенностью рассматриваемой схемы является также то, что при нулевом токе якоря ток возбуждения за счет наличия резистора Rш не равен нулю, поэтому отличен от нуля магнитный поток и двигатель имеет определенную скорость идеального холостого хода w0.
Вопрос 39. Типовые схемы управления Ад с фазным ротором.
Включение двигателя производится нажатием кнопки SB1, после чего включается контактор КМ1. Статор двигателя подсоединяется к сети, электромагнитный тормоз YB растормаживается, и начинается разбег двигателя по реостатной характеристике, соответствующей наличию резистора Rд1 в цепи ротора.
Включение КМ1 приводит к срабатыванию контактора КМ4, который своими контактами шунтирует не нужный при пуске резистор противовключения Rд2, а так же разрывает цепь катушки реле времени КТ. Последнее, потеряв питание, начинает отсчет выдержки времени, после чего замыкает свои контакты в цепи катушки контактора КМ3, который срабатывает и шунтирует пусковой резистор Rд1 в цепи ротора, и двигателя выходит на свою естественную характеристику.
Для осуществления торможения двигателя нажимается кнопка SB2, размыкающий контакт которой разрывает цепь питания катушки контактора КМ1, и он отключается. После этого двигатель отключается от сети, разрывается цепь питания контактора КМ4 и замыкается цепь питания реле КТ. В результате этого контакторы КМ3 и КМ4 отключаются и в цепь ротора двигателя вводится сопротивление (Rд1+Rд2).
+ схема на странице 201
Вопрос 40. Торможение ЭП с ДПТ последовательного возбуждения.
Для осуществления торможения двигатель должен быть переведен в генераторный режим работы. Этот режим может быть реализован по двум схемам: с независимым возбуждением и самовозбуждением.
Самовозбуждение. Торможение с самовозбуждением реализуется при последовательном соединении обмоток якоря, возбуждения и резистора, который может отсутствовать. Для возникновения и существования этого режима необходимо выполнение следующих условий: наличие остаточного магнитного потока в двигателе, совпадение по направление остаточного и основного магнитного потока, создаваемого током возбуждения, сопротивление цепи обмотки якоря должно быть меньше критического. Торможение происходит следующим образом: при наличии остаточного магнитного поля и вращении якоря в нем наводится ЭДС, под действием которой по якорю протекает ток. Этот ток создает основной магнитный поток, который, совпадая по направлению с остаточным магнитным потоком, приведет к увеличению ЭДС. Это в свою очередь повлечет за собой увеличение тока в двигателе, и такой процесс его самовозбуждения будет продолжаться до тех пор, пока ЭДС не станет равной суммарному падению напряжения в цепи якоря.
Режим торможения противовключением осуществляется изменением полярности напряжения на обмотке якоря при сохранении того же направления тока в обмотке возбуждения. При этом изменяется знак момента двигателя. Для ограничения тока в этом режиме в цепь якоря водится добавочный резистор.
 Вопрос 41. Схемы замкнутых структур электрического привода
Вопрос 41. Схемы замкнутых структур электрического привода
 Замкнутый ЭП, как и любая система автоматического регулирования, может быть реализован либо по принципу отклонения с использованием обратных связей, либо по принципу компенсации внешнего возмущения. Основным отличительным признаком замкнутого ЭП является полное или частичное устранение влияния внешнего возмущения на регулируемую координату, например, скорость такого ЭП может оставаться практически неизменной при возможных колебаниях момента нагрузки. В силу этого обстоятельства замкнутые ЭП обеспечивают более качественное управление движением исполнительных органов, хотя их схемы оказываются более сложными.
Замкнутый ЭП, как и любая система автоматического регулирования, может быть реализован либо по принципу отклонения с использованием обратных связей, либо по принципу компенсации внешнего возмущения. Основным отличительным признаком замкнутого ЭП является полное или частичное устранение влияния внешнего возмущения на регулируемую координату, например, скорость такого ЭП может оставаться практически неизменной при возможных колебаниях момента нагрузки. В силу этого обстоятельства замкнутые ЭП обеспечивают более качественное управление движением исполнительных органов, хотя их схемы оказываются более сложными.
Для реализации принципа компенсации (рис. 1) возмущающего воздействия дополнительный сигнал, пропорциональный возмущению, подается на вход ЭП вместе с сигналом задания. В результате суммарный сигнал обеспечивает такое управление ЭП, при котором осуществляется компенсация внешнего воздействия и устранение тем самым его влияния на регулируемую координату. Несмотря на все достоинства, этот способ не нашел широкого применения в ЭП из-за сложности реализации датчиков возмущающих воздействий, в частности момента нагрузки М.
Особенностью ЭП, построенного по принципу отклонения (рис. 2), является наличие цепи обратной связи. Информация о регулируемой координате подается на вход ЭП в виде сигнала обратной связи, который сравнивается с задающим сигналом, и полученный результирующий сигнал (его называют сигналом рассогласования, отклонения или ошибки) является управляющим сигналом для ЭП. Если под влиянием возмущающего воздействия начинает изменяться регулируемая координата, то за счет выбора направления и силы воздействия обратной связи произойдет соответствующее изменение режима работы ЭП и полное или частичное восстановление ее уровня, т. е. в таких системах регулирование ведется с учетом результата регулирования.
Дата добавления: 2018-02-15 ; просмотров: 713 ; Мы поможем в написании вашей работы!







