- Как устроен электросамокат
- Как сделать электросамокат – пошаговая инструкция с фотографиями
- Шаг 1: Детали и инструменты
- Детали:
- Инструменты:
- Шаг 2: Подбор базы для скутера
- Шаг 3: Задняя подвеска
- Шаг 4: Вилка
- Шаг 5: Колеса
- Шаг 6: Коробка передач
- Шаг 7: Натяжитель цепи
- Шаг 8: Тормоз
- Шаг 9: Руль
- Шаг 10: Рама (основа)
- Шаг 11: Монтаж и подключение электроники
- Шаг 12: Аккумулятор
- Шаг 13: Держатель батареи
- Шаг 14: Завершающий этап сборки
- Видео
Как устроен электросамокат
В последнее время в парках и на улицах наших городов, особенно в сухое и теплое время года, можно заметить все больше электрических самокатов. За последние несколько лет они успели превратиться из игрушек в полноценное средство индивидуального передвижения сродни когда-то безальтернативному велосипеду.
На электрическом самокате можно без устали маневрировать по тротуару или даже среди стоящих в пробке автомобилей. На самокате всегда удобно прокатиться через сквер, доехать до работы по кротчайшему пути, при этом не возникнет никаких проблем с поиском места для парковки, как это бывает с мотороллерами. Давайте поговорим об устройстве электрического самоката, обратим внимание на принцип его работы.

Сразу заметим, что полученное представление об общем устройстве электрического самоката не гарантирует, что вы станете специалистом по сервисному обслуживанию данного транспорта. Ремонт в любом случае лучше доверить профессионалам. Разные модели отличаются собственными особенностями конструкции, о которых знают лишь специально обученные опытные мастера.
Для ремонта электрических самокатов есть специализированные сервисные центры, в которые при необходимости и нужно будет обращаться. Так ремонт обойдется меньшими хлопотами и без лишних расходов.
Как и у любого самоката, у электрического самоката всегда есть рама, подошва, ручки и колеса. Но только у электрического самоката под декой установлен аккумулятор. Именно аккумулятор составляет большую часть веса транспортного средства. Безусловно присутствует здесь и двигатель, но о нем будет сказано далее, ибо двигатели у электрических самокатов бывают принципиально разными.

Вообще встречаются два типа электрических самокатов, отличия между которыми заключается именно в типах их моторов: цепные самокаты и самокаты с мотор-колесом. Опционально могут присутствовать и другие части, такие как бортовой компьютер, сиденье, багажник и прочие навороты, призванные повысить комфорт при передвижении.
Цепной самокат — классический электросамокат. В нем крутящий момент от двигателя на колесо передается посредством цепной передачи, подобно тому как это реализовано в велосипеде, скутере, мотоцикле.
Самокаты с мотор-колесом более надежны и просты, но самокаты с цепью — мощнее. Вместо цепи может быть натянут ремень, но это частности, которые менее надежны чем модели с цепью.
Именно цепные самокаты обладают достаточной мощностью для езды практически в любых условиях дорожного покрытия. На цепном самокате вы сможете с уверенностью перемещаться как каждый день по городу, так и при необходимости по бездорожью.
В конструкции цепного самоката, недалеко от оси располагаются мотор и редуктор, только за счет них и осуществляется движение транспорта. Цепь передает крутящийся момент на переднее колесо, при этом питающее напряжение подается на мотор через провода. В целях безопасности, двигатель и редуктор заключены в специальный герметичный короб.


Схема электросамоката XIAOMI Mijia M365:
Мотор-колесо — более современное решение для электрического самоката, самокаты с мотор-колесом относятся к среднему классу. Здесь двигатель установлен прямо в одном из колес, либо в обоих колесах установлено по двигателю. Электросамокаты с мотор-колесом имеют преимущества пред цепными. Такой самокат проще в обслуживании, заранее известно что не возникнет никаких проблем с цепью.

Двигатель при необходимости можно легко заменить. Вид самоката с мотор-колесом более эстетичен, вес транспортного средства меньше, однако есть и минус — мощность максимум 500 Вт. По бездорожью уже не покатаешься, так как просто не хватит мощности мотора. Зато для повседневной езды по городу такой самокат идеален.
В зависимости от модели самоката, мощности двигателя и емкости аккумулятора, он может ездить на расстояния от 30 до 50 км.
Как сделать электросамокат – пошаговая инструкция с фотографиями

В интернете сейчас присутствует достаточно много предложений для покупки электрических самокатов различной мощности, дизайна и размеров. Но их стоимость зачастую не всем по карману. Как известно, самый дешевый способ получить какую-либо вещь – это создать ее собственными руками, используя только исходные материалы, подручный инструмент и б/у детали других устройств.
Вот небольшая пошаговая инструкция о том, как собрать собственный электросамокат своими же руками с минимальными вложениями.
Скутер рассчитан на максимальную скорость около 30 км в час, будет иметь около 3 лошадиных сил и сможет ехать на одном заряде примерно 18-20 км.
Шаг 1: Детали и инструменты
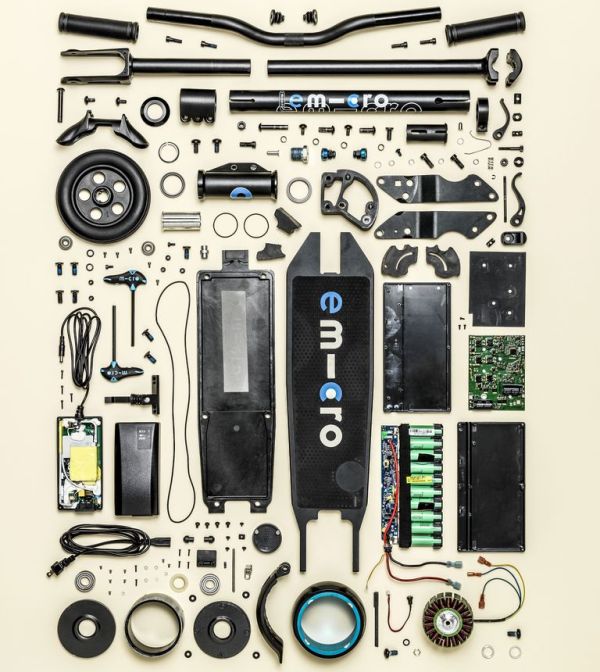
Ниже представлен базовый набор наиболее важных используемых компонентов (деталей) и необходимых инструментов. Насколько это возможно, максимально запаситесь б/у деталями от различных электрических приборов, которые зачастую пылятся на вашем чердаке или в гараже.
Как сделать хороший электросамокат, и что вам для этого понадобится:
Детали:
- Колеса – 12,5-дюймовые низкоскоростные пневматические.
- Мотор – 3x CIM.




Инструменты:
- Дрель/шуруповерт – с большим количеством бит.
- Ленточная пила (если есть) – с металлическими режущими лезвиями.
- Токарный станок – не обязательно, но он обеспечит сверление точно выровненных отверстий намного проще, чем с ручным сверлом.
- Шлифовальная машинка – для сглаживания острых углов.
- Горелки факельные и алюминиево-цинковые паяльные палочки.
- Большой ассортимент зажимов.
- Паяльник + припой – один с очень толстым наконечником для пайки больших разъемов питания и батарей, и сменное жало для более тонкой работы.
- Зарядное устройство для литиевого аккумулятора с блоком питания.

Шаг 2: Подбор базы для скутера
Изготовление нового самодельного электрического самоката необходимо начинать с основы – рамы бывшего обычного скутера. Подойдет основа от любого классического скутера Razor, особенно передняя и задняя подвески колес, в которых используются пружины и амортизаторы, а не резина, при этом он имеет более элегантный механизм складывания. Переделка обычного самоката в электросамокат – это самый простой способ, но возникнет проблема с местом для подвесного оборудования.

Колеса вряд ли получится использовать старые. Они, как правило, всегда стерты, а подшипники разболтаны или сломаны. Так что базовые колеса придется купить новые (лучше со сменными шинами). Подбирая раму и колеса, учтите, что будущая конструкция должна возвышаться на 10-15 см от поверхности земли при смонтированных колесах.
Шаг 3: Задняя подвеска
Чтобы разместить хорошие колеса, понадобится собрать совершенно новую заднюю подвеску из алюминия. Тут пригодятся несколько дешевых амортизаторов от горных велосипедов с силой пружин примерно 250-300 кг/см. Подобные детали в большом количестве продаются на специализированных рынках/магазинах, так же их много и на интернет аукционах. Опоры для амортизаторов выполняются из 1/4″, двух 2″ и 1″ U-образного канала алюминия.
Шаг 4: Вилка
Как и задняя подвеска, вилка и передняя подвеска также подвергнутся значительной модернизации из-за новых колес. Тут также можно использовать пружины и амортизаторы из вилки горного велосипеда для создания новой пары амортизаторов с шарнирами на каждом конце.

Такая конструкция намного проще и надежнее телескопической вилки. Переднее колесо при такой конструкции можно легко центрировать перед осью рулевой колонки. Очень важно установить колесо немного выдвинутым вперед – это значительно увеличит рулевые характеристики. Не бойтесь поднять переднюю часть скутера еще на пару сантиметров, если это понадобится.
Шаг 5: Колеса
Чтобы зафиксировать колеса на остальной части самоката, нужно изготовить собственные оси из 1/2 » резьбовых стержней (шпилек) и соответствующих гаек. Внутренний диаметр колесных подшипников подойдет 5/8″, поэтому, чтобы получить 1/2″ ось, которая будет плотно прилегать к подшипникам, понадобятся соответствующие подкладки. Производители электросамокатов выполняют свои детали уникальными, неподходящими для других моделей. Поэтому выбор колес у вас будет довольно большой.

Гайки привинчиваются друг к другу, пока их фланцы не прижмутся к внешней стороне подшипников колеса. Чтобы зафиксировать распорки на месте, дополнительно навинчивается вторая гайка. Чтобы зафиксировать каждое колесо на раме, используются еще четыре гайки.
Шаг 6: Коробка передач
Поскольку моторы CIM, которые мы планируем использовать, являются относительно высокоскоростными двигателями с малым крутящим моментом, необходима коробка передач, чтобы снизить выходную скорость двигателей до приемлемого уровня. Самодельный электросамокат, выполненный своими руками, не сможет работать без коробки передач: это не игрушечная машинка, тут нужно обеспечить плавный старт.
В принципе, подойдет любая двухступенчатая коробка передач. Опять же, подбираем б/у за минимальную цену. Вырезаем редукторы, чтобы избавиться от как можно большего количества потерянного пространства и полностью убираем корпус, чтобы получить 3-моторную коробку передач с одним выходным валом.

Редуктор устанавливаем на скутере, используя оригинальные отверстия для болтов, встроенные в коробку передач, и некоторые детали из алюминиевого уголка, прикрепленные болтами к раме скутера. Наконец, к выходному валу прикрепляется 21 зубчатая звездочка для цепи №35.
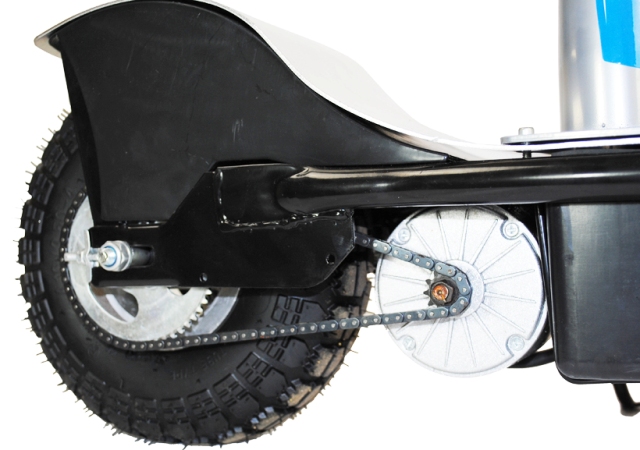
Шаг 7: Натяжитель цепи
Самой сложной частью будущего электрического самоката в плане монтажа и последующей настройки является натяжитель цепи. Из-за его местоположения, при сжатии подвески скутера, эффективная длина цепи между звездочкой на коробке передач и звездочкой на заднем колесе увеличивается. Он должен сохранять (компенсировать) дополнительную натяжку цепи. В дополнение к натяжителю цепи, скутеру потребовалась и холостая звездочка.

При движении по неровной поверхности, прыжках или незначительных ударах корпуса, цепь может слетать с задней звездочки. Чтобы этого не происходило, придется выточить специальный ограничитель. Построить электросамокат своими руками из обычного шуруповерта не выйдет: слишком маленький вращательный момент.
Шаг 8: Тормоз
Двигатели и приводные цепи – это конечно хорошо, но возможность вовремя остановить свой самокат еще важнее. Поскольку роторы дисковых тормозов – это просто большие вращающиеся металлические диски, прикрепленные к колесу, то можно просто использовать ведущую звездочку колеса в качестве дискового тормоза.
Необходимо будет построить суппорт для захвата звездочки из алюминиевого блока. Для этого используем алюминиевый U-образный канал, две тормозные колодки, пружины и несколько болтов. Колодки можно брать абсолютно любые – это гоночный болид.

Правую тормозную колодку закрепляем на стержне, который проходит через суппорт, пружины и алюминиевую раму подвески. Поскольку пружина расширяется посередине, тормоз неактивен, и при необходимости тормозной кабель тянет две половинки суппорта в направлении друг к другу так, что они оба движутся к звездочке и сжимают ее с обеих сторон, обеспечивая торможение.
Шаг 9: Руль
Для большего и уверенного контроля нам понадобится более широкий руль, ведь колеса у нас будут достаточно широкие. Легко подойдет практически любой руль как от советской модели, так и от современных горных велосипедов.

Фиксируем его на рулевой колонке, предварительно отрегулировав зажим алюминиевой скобой с болтовой затяжкой. Если руль будет довольно толстым, то в нем с легкостью можно разместить дроссель и датчик холла.
Шаг 10: Рама (основа)
Как сделать электросамокат из самого обычного самоката? Оригинальная рама от стандартного Райзер скутера будет довольно мала. Ее можно использовать как основную площадку для крепления дополнительной поверхности из облегченных материалов. Это обеспечит больше места для подвешивания компонентов, таких как батареи. Новую поверхность можно выполнить из углеродного волокна или высокопрочного пластика – это значительно увеличит ее износостойкость. Новую основу привинчиваем сверху старой, винтами из нержавеющей стали с потайной головкой.

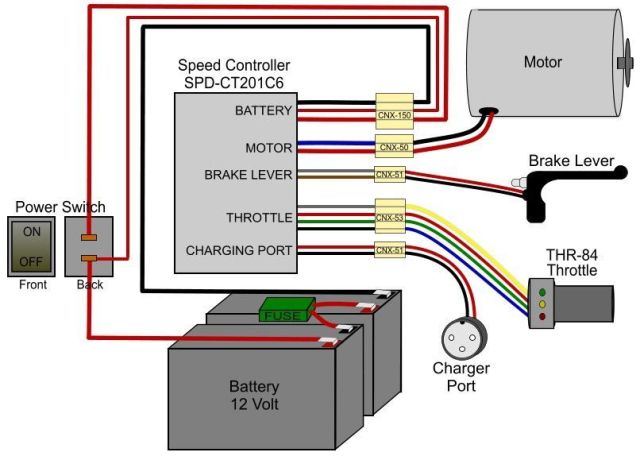
Шаг 11: Монтаж и подключение электроники
Контроллер электродвигателя устанавливаем на лицевой стороне коробки передач на максимально близком расстоянии от алюминиевого угла рамы, чтобы оставить как можно больше места для батарей. Главный выключатель питания прикрепляем болтами непосредственно к палубе скутера, в то время как держатель предохранителя и сам предохранитель прикрепляем болтами к нижней части рамы (можно использовать алюминиевый угол или канал). Лучше использовать плавкий предохранитель на 200А, так как такой ток является пиковым током двигателя.

Все электрические соединения должны быть подключены с помощью прочных соединительных токопроводящих разъемов. Схемы электросамоката своими руками и чертежи подключений можно легко найти в интернете для различных типов двигателей, коробок передач и аккумуляторов любой мощности.
Шаг 12: Аккумулятор
Для максимального облегчения веса всей конструкции и запаса энергии оптимальным вариантом будет использовать литиевые полимерные батареи 5 Ah (например LiPo от HobbyKing).

При таком объеме достаточно будет 8 батарей, еще одну берем как запасную. В крупных партиях часто попадаются бракованные элементы. Их конечно можно будет потом заменить в магазине на новую батарею, но лучше сразу взять с запасом. В итоге мы получим батарею с характеристиками примерно в 60В и около 600 Вт выходной мощности.
Шаг 13: Держатель батареи
Сборка для электросамоката своими руками не будет завершена без прикрепленной к нему батареи. При этом необходимо продумать возможность быстрой замены источников питания. Чтобы установить батареи на раму скутера, сооружаем небольшую алюминиевую или пластиковую коробку.

Лучше конечно использовать поликарбонат и обклеить его углеродным волокном для большей прочности. Фиксировать коробку нужно обязательно болтами с потайной шляпкой, чтобы при движении ее головка не цеплялась за ноги и не выступала на поверхности рамы.
Шаг 14: Завершающий этап сборки
Финальным этапом будет сборка и спайка всей конструкции вместе. Для этого используем шуруповерт с битами, рожковые ключи и отвертку. Плотно затягиваем все болтовые соединения, дважды их проверяем.

На этом примерно все – сборка электросамоката своими собственными руками закончена, можно отправляться на первые полевые испытания, после чего дорабатывать или усовершенствовать полученную модель.







