Схема ручного управления шаговыми двигателями
Материал перевел и подготовил RA3TOX (сайт «Радиофанат»)
 В данной статье описывается простой способ ручного управления четырехполюсным однополярным шаговым двигателем. Для этого необходим галетный переключатель, восемь недорогих выпрямительных диодов и несколько других компонентов.
В данной статье описывается простой способ ручного управления четырехполюсным однополярным шаговым двигателем. Для этого необходим галетный переключатель, восемь недорогих выпрямительных диодов и несколько других компонентов.
Полная схема для ручного управления шаговым электродвигателем показана на рисунке 1. Поворачивая галетный переключатель S1 по часовой стрелке, шаговый двигатель вращается также по часовой стрелке. Поверните поворотный переключатель против часовой стрелки, а шаговый двигатель вращается против часовой стрелки. Поверните поворотный переключатель, и шаговый двигатель остановится с полным крутящим моментом (называемым удерживающим моментом). Это имитирует базовые функции управления, доступные со стандартного контроллера шагового двигателя — за исключением того, что ручной контроллер шагового двигателя работает полностью вручную. С помощью светодиода и геркона можно контролировать состояние двигателя, когда он завершит один полный оборот.

Рис.1. Схема устройства.
Возможные аврианты применения устройства — это позиционирование световых или вентиляционных отверстий, ручное вращение стрелок настенных часов, дистанционное управление роботами и роботизированными игрушками, видеокамерами. Для радиолюбителей возможно его применение в поворотных устройствах антенн, вращении конденсаторов в магнитных рамочных антеннах и т.п.
Четырехполюсный униполярный шаговый двигатель может, как правило, управляться четырьмя различными способами — каждый из которых имеет свои преимущества и недостатки:
- Управление волной (Wave control) — это самая простая форма управления, так как она возбуждает только одну обмотку (или фазу) за раз. Его главный недостаток — плохой крутящий момент.
- Полношаговое управление (Full-step control) — это простое средство управления с хорошим крутящим моментом, использующее одновременно две обмотки двигателя.
- Полушаговое управление (Half-step control) . Это более сложная форма управления,имеющая по сравнению с предыдущим методов в два раза больше шагов. Он имеет хороший крутящий момент и стабилизирует работу двигателя. Однако этот метод не подходит при ручном управлении.
- Микрошаговый контроль (Micro-steppping control) — это комплексная форма управления со сложной схемой, которая обеспечивает бесчисленные «промежуточные шаги» и высокую точность. Он часто используется в промышленности.
Для наших целей нам лючше всего подходит полношаговый контроль, так как он прост в реализации и имеет хороший крутящий момент. Для этого необходимо, чтобы 4-х битная управляющая последовательность двигалась вправо или влево по обмоткам шагового двигателя. Однополюсный четырехпозиционный галетный переключатель будет выполнять эту задачу с помощью мультиплексирования восемью диодами. Однако, поскольку такие переключатели обычно не имеют вращения на 360 градусов, вместо них используется тройной четырехпозиционный переключатель.
Следует отметить, что стандартный переключатель здесь не подходит , так как в момент переключения происходит кратковременная потеря питания на выводах двигателя во время вращения, что неблагоприятно скажется на крутящем моменте, особенно, если мотор установлен вертикально. Поэтому здесь используется переключатель ( make-before-break rotary switch ), который создает новый контакт перед тем как разорван предыдущий. Контакты переключаются как-бы в нахлест. Электролитический конденсатор C1 сглаживает мгновенный всплеск напряжения, когда переключатель перемещается. Если не требуется удерживающий крутящий момент, цепь питания может быть отключена, как только шаговый двигатель достигнет нужного положения. Момент затяжки (остаточный крутящий момент, когда шаговый двигатель выключен) обычно составляет одну десятую от состояния удержания крутящего момента. Красный светодиод. D9 указывает наличие питающего напряжения (состояние выключателя S3 — On/Off ).
Идентификация обмоток двигателя
Как известно, нет стандартного цветового кодирования для идентификации проводов четырехфазного униполярного шагового двигателя. Автор опробовал шесть шаговых двигателей, из которых только два имели одинаковую цветовую маркировку проводов! Такие двигатели иногда имеют пять выводов, иногда шесть, а иногда и восемь выводов (для каждой из четырех обмоток). К счастью, задача идентификации не слишком сложна. Первый шаг — найти общий провод или выводы. Шестивыводный четырехобмоточный шаговый двигатель имеет два общих провода, которые, скорее всего, находятся в центре двух рядов по три (они часто используются в принтерах или факсимильных аппаратах). Пятипроводный двигатель имеет один общий вывод. Эти двигатели обычно используется в 5-дюймовых дисководах.
Обмотки легко протестировать с помощью мультиметра: Если имеется шесть проводов — измерьте сопротивление на всевозможные комбинации выводов (например, зелено-белое, зелено-красное, бело-красное . ). Большое сопротивление указывает на последовательное соединение двух обмоток, а малое на отдельную обмотку. Когда определите центральные выводы — соедините их вместе.
В случае пяти проводов, находим только один провод, при котором измеряются самые низкие сопротивления. Это и будет общий провод.
Большинство четырехполюсных однополярных шаговых двигателей питаются напряжением 12 вольт или что-то около этого. Рекомендуется использовать регулируемый источник питания на 12 В, так как нерегулируемое питание может существенно повышаться 12 В, что может привести к чрезмерному нагреву двигателя или даже к перегоранию. Источник питания должен обеспечить мощность 6 Вт или 500 мА для небольших двигателей (диаметром от 3 до 4 см).
Следующим шагом является подключение общего провода двигателя к положительной клемме источника питания 12 В. Теперь возьмите отрицательный провод источника 12 В и поочередно подключите его к четырем выводам в различных последовательностях. После того, как вы нашли последовательность, которая продвигает двигатель небольшими шагами по часовой стрелке, обозначьте эти провода от А до D. То, что вы только что достигли — это управление волной (Wave Control), см. Таблицу 1.
Таблица 1: Wave Control
Наконец, обмотки А-D должны быть под напряжением в последовательности, которая показанная в таблице 2, и которая является полношаговым управлением (Full-step Control).
Таблица 2: Full-step Control
Таблица, нарисованная здесь, является наиболее логически последовательным способом, и вы сможете оценить смещение двоичной последовательности 1-0-0-1 по проводам шагового двигателя.
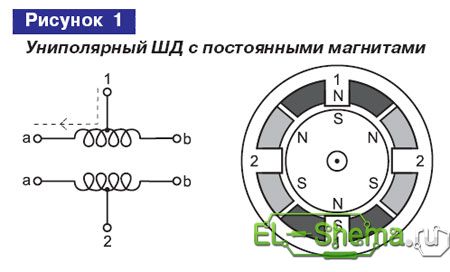
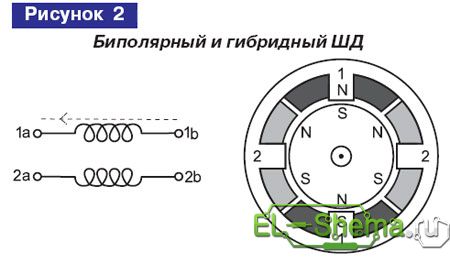
Графическое подключение обмоток (или фаз) от А до D показано на рисунке 2.

Рис.2 Униполярный привод.
Устройство собрано на макетной плате. Элементы переключения — галетник и тумблер включения питания монтируются на передней панеле прибора. Также на корпусе прибора установлено гнездо для подключения источника питания.


Рис.3. Компоновка элементов.
На галетном переключателе необходимо убрать ограничитель перемещения ползунка, чтобы он проворачивался по кругу.
В конструкции использованы резисторы мощностью 0.25W 5%, электролитический конденсаторы 1000 мкф на 16 В. Полупроводниковые диоды D1. D8 типа 1N4001 50V 1A . Светодиод D9 — 5 мм красный, D10 — 5 мм зеленый. Для контроля оборотов используется маленький магнит, который устанавливается на подвижной планке, закрепленной на валу шагового двигателя. Геркон фиксируется в подходящем месте и будет замыкаться в момент прохождения около него магнита.

Рис.4. Размещение элементов в корпусе.
В случае использования мощного шагового двигателя рекомендуется увеличить емкость электролитического конденсатора. При этом понадобится и более мощный исочник питания.

Хотя большинство 12 вольтовых однополярных шаговы двигателей рассчитаны на непрерывное питание, они могут достаточно ощутимо нагреваться. Если полный крутящий момент не требуется, простым решением является установка 15-омного проволочного резистора в одну из линий питания обмоток.
Тяговое усилие маленького четырехфазного униполярного шагового двигателя довольно сильно ощущается пальцами, и такие двигатели могут найти большое применений. Как видите, затраты на изготовление такого привода во много раз меньше, чем у обычной системы управления шаговым двигателем на микроконтроллерах или микросхемах. Примечание от RA3TOX.
На мой взгляд, самый дефицитный элемент в этом приводе — это галетный переключатель. Можно попытаться найти его на AliExpress по названию » make-before-break rotary switch » или переделать (расширить) подвижную пластину стандартного галетника. Есть керамические галетник с широким контактом, как показано на левом рисунке. На среднем рисунке галетник с узким коммутирующим контактом (самый распространенный вариант). Проще всего переделать контакты на коричневых открытых галетниках (правый рисунок). Из представленных образцов наиболее применим средний галетник (2 направления на 5 положений), но надо поискать такой с широким ползунковым контактом, при этом два крайних положения 4 и 5 следует замкнуть.



Несколько конструкций переключателей.
УПРАВЛЕНИЕ ШАГОВЫМ ДВИГАТЕЛЕМ
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.

Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
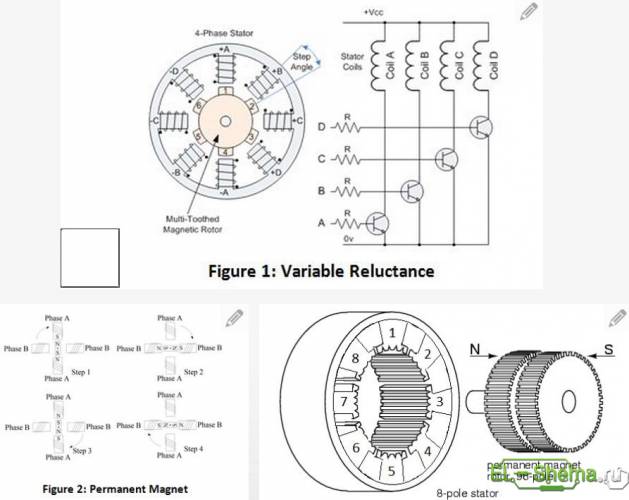
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор — это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Униполярные и биполярные шаговые двигатели
Также существует ещё два типа шаговых двигателей: униполярные и биполярные. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.
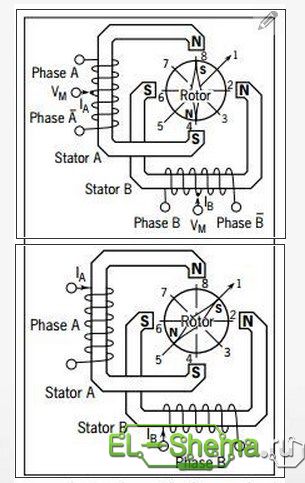
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса — положительный и отрицательный.
То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
Подключение шаговых двигателей
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8. 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
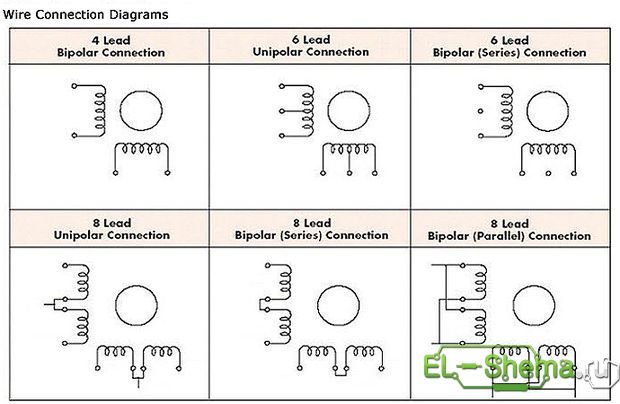
5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями — полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
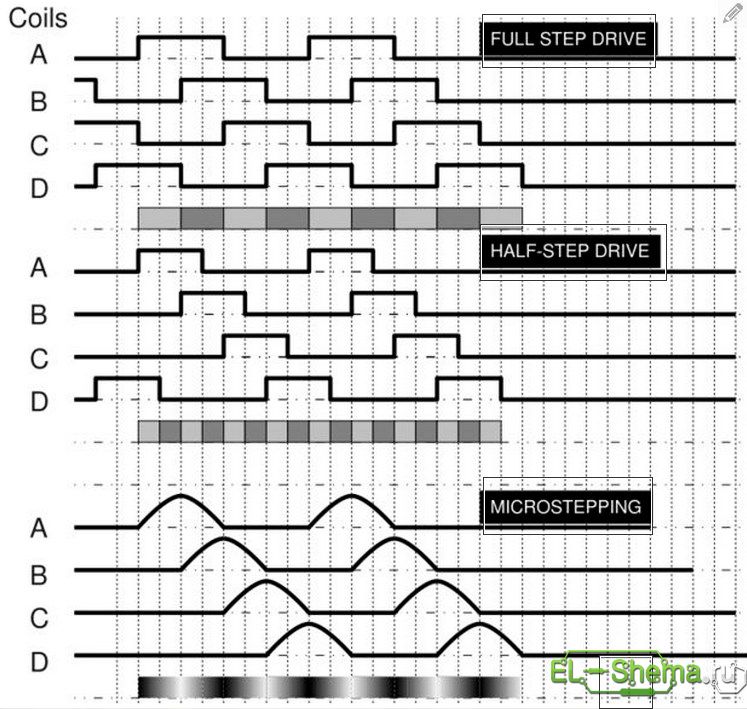
Полный шаг — такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг — поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
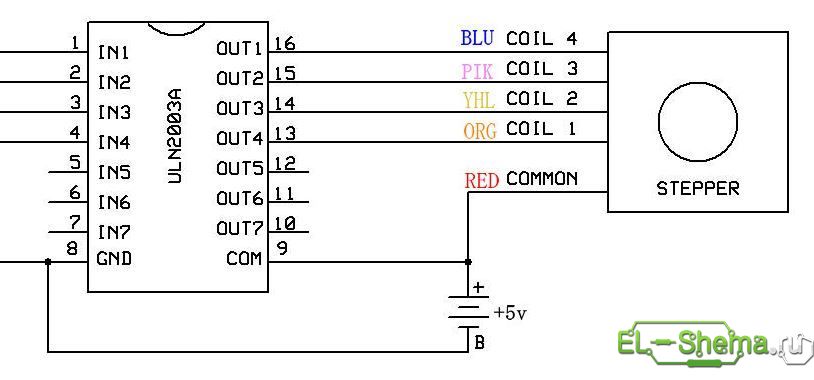
Схема подключения шаговых двигателей
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
Originally posted 2018-11-23 11:47:42. Republished by Blog Post Promoter







