- Реверс двигателя постоянного тока схемы.
- Пуск, реверсирование и торможение двигателей постоянного тока
- Реверсирование двигателя независимого возбуждения и механические характеристики для прямого и обратного напрявления вращения.
- Тормозные режимы двигателя независимого и параллельного возбуждения.
- Генераторное торможение с рекуперацией (отдачей) энергии в сеть.
Реверс двигателя постоянного тока схемы.
В статье «Регуляторы оборотов электродвигателей » речь шла о регулировке оборотов коллекторных двигателей электроинструментов. Нередко возникает и другая задача: реверс двигателя постоянного тока, т.е. требуется обеспечить его вращение в одну и другую стороны. Это может понадобиться, например, для привода ворот в гараже или коттедже, в различных моделях и пр.
Проще всего такая задача с реверсом решается с помощью мостовой схемы, которая в общем виде представлена на рис.1 .
Схема реверса состоит из четырех ключей, двигателя и источника питания. Когда все ключи разомкнуты ( рис.1а ), ток через двигатель не течет. При коммутации первого и четвертого ключа ток через двигатель Iд течет слева направо ( рис.1б ), и двигатель вращается в одном направлении. А при коммутации второго и третьего ключей — течет справа налево ( рис.1в ), и двигатель вращается в обратном направлении.
Понятно, что руками коммутировать для реверса четыре переключателя неудобно, поэтому вместо ключей используем транзисторы ( рис.2 ).
Транзисторы могут быть разной проводимости, полевыми или биполярными. Работают они в ключевом режиме.
Обратно включенные диоды VD1. VD4 защищают транзисторы от выхода из строя, так как в момент выключения электродвигателя возникает достаточно большая ЭДС самоиндукции.
Силовая часть устройства реверса на биполярных транзисторах приведена на рис.3 .
Она состоит из четырех силовых и двух управляющих транзисторов; резисторов, ограничивающих базовые токи; шунтирующих диодов и гальванической развязки в виде двух оптопар.
Питание моста происходит от блока питания, подающего постоянное напряжение +50 В относительно земли. В cостоянии покоя на оба канала (А и Б) подается 0 В. Все транзисторы закрыты, на концах обмоток потенциал 0 В. Вал двигателя не вращается.
Для вращения двигателя в одну сторону на канал А подается постоянное напряжение +5 В или ШИМ-сигнал, на канал Б — 0 В. Открывается оптрон VU1, следом управляющий VТ5; при этом VТ6 закрыт.
Через резистор R2 протекает ток, открывающий силовые VТ1 и VТ4, а VТ2 и VТЗ закрыты.
Таким образом, на конце обмотки Я1 потенциал составляет +50 В, на конце обмотки Я2 — 0 В. Вал двигателя вращается (например, по часовой стрелке).
Чтобы включить реверс двигателя, на канал Б подается напряжение +5 В (ШИМ-сигнал), на канал А — 0 В. Управляющий VТ6 открыт, VТ5 — закрыт. Через резистор R4 в цепи коллектора VТ6 протекает ток, открывающий VТ2 и VТ3, а VТ1 и VТ4 закрыты. На конце обмотки Я1 потенциал составляет 0 В, на конце обмотки Я2 — +50 В. Вал двигателя вращается против часовой стрелки.
В случае подачи полoжительного напряжения на оба канала (А и Б) произойдет короткое замыкание, поэтому такой режим предотвращается управляющей частью устройства.
Реверс двигателя постоянного тока можно выполнить и на МОП-транзисторах ( рис.4 ). На входе схемы реверса последовательно установлены два инвертора так, что выход одного одновременно является входом другого. При этом сигнал управления (высокий или низкий логический уровень) на входе DD1.1 инвертируется и подается на вход DD1.2.
Выходы инверторов управляют полевыми транзисторами. При высоком уровне на входе, на выходе DD1.1 — низкий уровень, а на выходе DD1.2. — высокий. Благодаря этому VТ2 и VТЗ открыты и пропускают ток от отрицательного к положительному полюсу источника питания. Двигатель М1 вращается против часовой стрелки.
Если на вход схемы реверса подать низкий уровень, на выходе DD1.1 появится высокий уровень и откроются VT1 и VТ4, замыкая другую диагональ моста. Теперь ток потечет в другую сторону, и двигатель изменит направление вращения. Для управления устройством для реверса необходим логический сигнал МОП-уровня (0/+12 В).
Устройство для реверса испытывалось с электродвигателем автомобильного вентилятора. Мощные МОП-транзисторы (для КП74ЗБ напряжение сток-затвор составляет 80 В. максимальный ток стока — 4,9 А) обеспечивают запас по мощности и по напряжению.
Сопротивление открытого канала составляет 0,3.. .0,5 Ом. Для повышения эффективности VT1. . .VТ4 устанавливаются на теплоотводы.
Напряжение питания зависит от типа применяемого электродвигателя М1. Если его напряжение питания превышает 15 В, следует предусмотреть в схеме дополнительный стабилизатор для питания микросхемы DD1.
Вместо К561ЛА7 можно применить другую микросхему серии 561, если ее элементы обеспечивают инвертирование сигнала (К561ЛЕ5, К561ЛН2).
Другая схема управления реверсом, построенная на мощных комплементарных полевых транзисторах, показана на рис.5 .
Пуск, реверсирование и торможение двигателей постоянного тока
 Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пусковой реостат выполняется из провода или ленты с высоким удельным сопротивлением, разделенных на секции. Провода присоединяются к медным кнопочным или плоским контактам в местах перехода от одной секции к другой. По контактам перемещается медная щетка поворотного рычага реостата. Реостаты могут иметь и другое выполнение. Ток возбуждения при пуске двигателя с параллельным возбуждением устанавливается соответствующим нормальной работе, цепь возбуждения включается прямо на напряжение сети, чтобы не было уменьшения напряжения, обусловленного падением напряжения в реостате (см. рис. 1).
Необходимость иметь нормальный ток возбуждения связана с тем, что при пуске двигатель должен развивать возможно больший допустимый момент Мэм, необходимый для обеспечения быстрого разгона. Пуск двигателя постоянного тока производится при последовательном уменьшении сопротивления реостата, обычно — путем перевода рычага реостата с одного неподвижного контакта реостата на другой и выключения секций; уменьшение сопротивления может производиться и путем замыкания накоротко секций контакторами, срабатывающими по заданной программе.
При пуске вручную или автоматически ток изменяется от максимального значения, равного 1,8 —2,5-кратному номинальному в начале работы при данном сопротивлении реостата, до минимального значения, равного 1,1 — 1,5-кратному номинальному в конце работы и перед переключением на другое положение пускового реостата. Ток якоря после включения двигателя при сопротивлении реостата rп составляет
где Uс — напряжение сети.
После включения начинается разгон двигателя, при этом возникает противо-ЭДС Е и уменьшается ток якоря. Если учесть, что механические характеристики n = f1(M н) и n = f2 (I я ) практически линейны, то при разгоне увеличение скорости вращения будет происходить по линейному закону в зависимости от тока якоря (рис. 1).
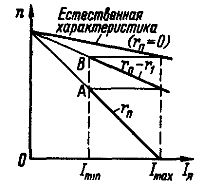
Рис. 1. Диаграмма пуска двигателя постоянного тока
Пусковая диаграмма (рис. 1) для различных сопротивлений в цепи якоря представляет собой отрезки линейных механических характеристик. При уменьшении тока якоря IЯ до значения Imin выключается секция реостата с сопротивлением r1 и ток возрастает до значения
где E1 — ЭДС в точке А характеристики; r1—сопротивление выключаемой секции.
Затем снова происходит разгон двигателя до точки В, и так далее вплоть до выхода на естественную характеристику, когда двигатель будет включен прямо на напряжение Uc. Пусковые реостаты рассчитаны по нагреву на 4 —6 пусков подряд, поэтому нужно следить, чтобы в конце пуска пусковой реостат был полностью выведен.
При остановке двигатель отключается от источника энергии, а пусковой реостат полностью включается — двигатель готов к следующему пуску. Для устранения возможности появления больших ЭДС самоиндукции при разрыве цепи возбуждения и при ее отключении цепь может замыкаться на разрядное сопротивление.
В регулируемых приводах пуск двигателей постоянного тока производится путем постепенного повышения напряжения источника питания так, чтобы ток при пуске поддерживался в требуемых пределах или сохранялся в течение большей части времени пуска примерно неизменным. Последнее можно осуществить путем автоматического управления процессом изменения напряжения источника питания в системах с обратными связями.
Пуск двигателей постоянного тока с последовательным возбуждением производится также при помощи пусковых устройств. Пусковая диаграмма представляет собой отрезки нелинейной механической характеристики для различных сопротивлений цепи якоря. Пуск при относительно небольших мощностях может выполняться вручную, а при больших — путем замыкания накоротко секций пускового реостата контакторами, которые срабатывают при управлении вручную или автоматически.
Реверсирование — изменение направления вращения двигателя — производится путем изменения направления действия вращающего момента. Для этого требуется изменить направление магнитного потока двигателя постоянного тока, т. е. переключить обмотку возбуждения или якорь, при этом в якоре будет протекать ток другого направления. При переключении и цепи возбуждения, и якоря направление вращения останется прежним.
Обмотка возбуждения двигателя параллельного возбуждения имеет значительный запас энергии: постоянная времени обмотки составляет секунды для двигателей больших мощностей. Значительно меньше постоянная времени обмотки якоря. Поэтому для того чтобы реверсирование проходило возможно быстрее, производится переключение якоря. Только там, где не требуется быстродействия, можно выполнять реверсирование путем переключения цепи возбуждения.
Реверсирование двигателей последовательного возбуждения можно производить переключением или обмотки возбуждения, или обмотки якоря, так как запасы энергии в обмотках возбуждения и якоря невелики и их постоянные времени относительно малы.
При реверсировании двигателя с параллельным возбуждением якорь сперва отключается от источника питания и двигатель механически тормозится или переключается для торможения. После окончания торможения якорь переключается, если он не был переключен в процессе торможения, и выполняется пуск при другом направлении вращения.
В такой же последовательности производится и реверсирование двигателя последовательного возбуждения: отключение — торможение — переключение — пуск в другом направлении. У двигателей со смешанным возбуждением при реверсировании следует переключить якорь либо последовательную обмотку вместе с параллельной.
Торможение необходимо для того, чтобы уменьшить время выбега двигателей, которое при отсутствии торможения может быть недопустимо велико, а также для фиксации приводимых механизмов в определенном положении. Механическое торможение двигателей постоянного тока обычно производится при наложении тормозных колодок на тормозной шкив. Недостатком механических тормозов является то, что тормозной момент и время торможения зависят от случайных факторов: попадания масла или влаги на тормозной шкив и других. Поэтому такое торможение применяется, когда не ограничены время и тормозной путь.
В ряде случаев после предварительного электрического торможения при малой скорости можно достаточно точно произвести остановку механизма (например, подъемника) в заданном положении и зафиксировать его положение в определенном месте. Такое торможение применяется и в аварийных случаях.
Электрическое торможение обеспечивает достаточно точное получение требуемого тормозящего момента, но не может обеспечить фиксацию механизма в заданном месте. Поэтому электрическое торможение при необходимости дополняется механическим, которое входит в действие после окончания электрического.
Электрическое торможение происходит, когда ток протекает согласно с ЭДС двигателя. Возможны три способа торможения.
Торможение двигателей постоянного тока с возвратом энергии в сеть. При этом ЭДС Е должна быть больше напряжения источника питания UС и ток будет протекать в направлении ЭДС, являясь током генераторного режима. Запасенная кинетическая энергия будет преобразовываться в электрическую и частично возвращаться в сеть. Схема включения показана на рис. 2, а.
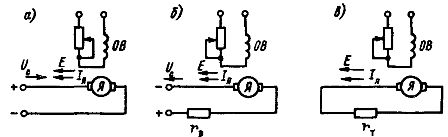
Рис. 2. Схемы электрического торможения двигателей постоянного тока: я — с возвратом энергии в сеть; б — при противовключении; в — динамическое торможение
Торможение двигателя постоянного тока может быть выполнено, когда уменьшается напряжение источника питания так, что Uc
Торможение при противовключении выполняется путем переключения вращающегося двигателя на обратное направление вращения. При этом ЭДС Е и напряжение Uc в якоре складываются, и для ограничения тока I следует включать резистор с начальным сопротивлением

где Imах — наибольший допустимый ток.
Торможение связано с большими потерями энергии.
Динамическое торможение двигателей постоянного тока выполняется при включении на зажимы вращающегося возбужденного двигателя резистора rт (рис. 2, в). Запасенная кинетическая энергия преобразуется в электрическую и рассеивается в цепи якоря как тепловая. Это наиболее распространенный способ торможения.

Схемы включения двигателя постоянного тока параллельного (независимого) возбуждения: а — схема включения двигателя, б — схема включения при динамическом торможении, в — схема для противовключения.
Реверсирование двигателя независимого возбуждения и механические характеристики для прямого и обратного напрявления вращения.
Для изменения направления вращения ДНВ нужно изменить направление действия момента, чего можно достичь изменением направления IЯили Ф, как следует из выражения:
 .
.
О бычно это осуществляется изменением направленияIЯ, т.к. изменение направления Ф сильно затянуло бы процесс реверса из-за большой индуктивности обмотки возбуждения. Кроме того, в ней при ее отключении и быстром исчезновении Ф может навестись большая ЭДС самоиндукции, которая может вызвать пробой изоляции.
бычно это осуществляется изменением направленияIЯ, т.к. изменение направления Ф сильно затянуло бы процесс реверса из-за большой индуктивности обмотки возбуждения. Кроме того, в ней при ее отключении и быстром исчезновении Ф может навестись большая ЭДС самоиндукции, которая может вызвать пробой изоляции.
Схема реверса двигателя изображена на рис.
В соответствии с 2-мя направлениями вращения имеют место 2-семейства механических характеристик. Для положительного направления вращения одно семейство пересекается в точке0, а для противоположного направления вращения – в точке -0.Уравнение механической характеристики для обр
соответствии с 2-мя направлениями вращения имеют место 2-семейства механических характеристик. Для положительного направления вращения одно семейство пересекается в точке0, а для противоположного направления вращения – в точке -0.Уравнение механической характеристики для обр атного направления вращения имеет вид:
атного направления вращения имеет вид:
 .
.
Эта форма уравнения более удобна при рассмотрении режимов работы, отображенных во II, III, иIVквадрантах.
Тормозные режимы двигателя независимого и параллельного возбуждения.
Процессы торможения для значительного числа электроприводов являются очень ответственными, т.к. нечеткая работа, а тем более отказ в работе тормозного устройства, могут привести к серьезным авариям. Почти во всех рабочих механизмах с электроприводом используется электрическое торможение. Возможны следующие тормозные режимы электродвигателей:
Генераторное с рекуперацией энергии в сеть;
Электродинамическое, называемое обычно просто динамическим, торможение.
Все тормозные режимы являются генераторными.
Генераторное торможение с рекуперацией (отдачей) энергии в сеть.
Переход двигателя в тормозной режим с отдачей энергии в сеть будет иметь место тогда, когда скорость двигателя будет больше скорости идеального холостого хода0. В этом случае ЭДС двигателя становится больше приложенного напряженияU. Ток якоря

п
 ри этом меняет направление. Такой режим имеет место при активном моменте сопротивления, например, при спуске груза, когда момент двигателя действует в направлении спуска груза. Под действием момента двигателя и исполнительного механизма система будет ускоряться. При этом противо ЭДС двигателя начнет расти, а ток падать. По достижении якорем скорости=0, ЭДС станет равной напряжениюUсети и машина не будет потреблять тока. Дальнейшее повышение скорости под влиянием движущего момента исполнительного механизма сделает ЭДС двигателя по абсолютной величине больше напряжение сети и двигатель, перейдя в генераторный режим, будет отдавать энергию в сеть, поскольку токIяизменит направление на противоположное. Момент, развиваемый при этом двигателем, будет тормозным. Двигатель превращается в генератор, преобразующий механическую энергию, подводимую к валу со стороны рабочей машины, в электрическую. Как только растущий тормозной момент двигателя станет равным движущему моменту Мс, создаваемому рабочей машиной, наступит установившийся режим спуска с постоянной скоростью.
ри этом меняет направление. Такой режим имеет место при активном моменте сопротивления, например, при спуске груза, когда момент двигателя действует в направлении спуска груза. Под действием момента двигателя и исполнительного механизма система будет ускоряться. При этом противо ЭДС двигателя начнет расти, а ток падать. По достижении якорем скорости=0, ЭДС станет равной напряжениюUсети и машина не будет потреблять тока. Дальнейшее повышение скорости под влиянием движущего момента исполнительного механизма сделает ЭДС двигателя по абсолютной величине больше напряжение сети и двигатель, перейдя в генераторный режим, будет отдавать энергию в сеть, поскольку токIяизменит направление на противоположное. Момент, развиваемый при этом двигателем, будет тормозным. Двигатель превращается в генератор, преобразующий механическую энергию, подводимую к валу со стороны рабочей машины, в электрическую. Как только растущий тормозной момент двигателя станет равным движущему моменту Мс, создаваемому рабочей машиной, наступит установившийся режим спуска с постоянной скоростью.
Т.к. переход из двигательного в тормозной режим произошел без изменения параметров двигателя и схемы его включения в сеть, уравнение механической характеристики остается прежним, так же, как и жесткость характеристики. Графически механические характеристики для режима рекуперации энергии в сеть являются естественными продолжением характеристик двигательного режима в область IIквадранта (см. рис.).
У величение сопротивления цепи якоря увеличивает крутизну механической характеристики. При этом то же значение тормозного момента получается при большей скорости. Практически этот способ электрического торможения применяется при спуске тяжелых грузов со скоростью, превышающей скорость0, как показано на следующем рис.
величение сопротивления цепи якоря увеличивает крутизну механической характеристики. При этом то же значение тормозного момента получается при большей скорости. Практически этот способ электрического торможения применяется при спуске тяжелых грузов со скоростью, превышающей скорость0, как показано на следующем рис.
Характеристика двигателя при его разгоне (он включается в направлении спуска груза) пойдет из IIIквадранта вIV. После достижения скорости -0система будет разгоняться менее интенсивно, т.к. знак момента двигателя меняется на обратный. При некоторой скорости наступит равновесие моментов Мдв=Мс. Груз будет спускаться с постоянной скоростьюУ.
Р ежим рекуперативного торможения возможен и при реактивном моменте сопротивления. Если двигатель, работающий, например, при номинальном напряжении, мгновенно переключить на пониженное напряжение (что возможно в системах ГД, ТП-Д), то в 1-й момент в силу инерционности скорость мгновенно не изменится, а двигатель окажется работающим на искусственной характеристике, соответствующей пониженному напряжению (см. рис.) в т.2 в генераторном режиме, развивая тормозной момент. Скорость, так же и тормозной момент, начнут уменьшаться, причем до т. А торможение сопровождается отдачей энергии в сеть, а с т. А до новой установившейся скорости2в т.2, начнется замедление с потреблением энергии из сети.
ежим рекуперативного торможения возможен и при реактивном моменте сопротивления. Если двигатель, работающий, например, при номинальном напряжении, мгновенно переключить на пониженное напряжение (что возможно в системах ГД, ТП-Д), то в 1-й момент в силу инерционности скорость мгновенно не изменится, а двигатель окажется работающим на искусственной характеристике, соответствующей пониженному напряжению (см. рис.) в т.2 в генераторном режиме, развивая тормозной момент. Скорость, так же и тормозной момент, начнут уменьшаться, причем до т. А торможение сопровождается отдачей энергии в сеть, а с т. А до новой установившейся скорости2в т.2, начнется замедление с потреблением энергии из сети.
Р ежим рекуперативного торможения можно получить при реактивном Мстакже путем быстрого изменения магнитного потока возбуждения. Если двигатель работал с ослабленным потоком Ф 14 / 48 14 15 16 17 18 19 20 21 22 > Следующая > >>
ежим рекуперативного торможения можно получить при реактивном Мстакже путем быстрого изменения магнитного потока возбуждения. Если двигатель работал с ослабленным потоком Ф 14 / 48 14 15 16 17 18 19 20 21 22 > Следующая > >>







