Регулятор оборотов с обратной связью для коллекторных двигателей переменного тока
Большинство мировых производителей профессиональных угловых шлифовальных машинок (болгарок) таких как Bosch, Metabo, Makita, DeWalt и других используют два типа регуляторов оборотов с обратной связью.
С помощью таходатчика
На конце якоря мотора установлен кольцевой магнит с прорезью или срезом, а на плате регулятора установлена катушка индуктивности или датчик Холла. Такой регулятор обеспечивает максимально точную стабилизацию оборотов двигателя при изменении нагрузки.
На основе измерения падения напряжения на электродвигателе
В этом случае измеряется падение напряжения на двигателе, и схема управления изменяет длительность открытия силового ключа. Такой регулятор, если он правильно настроен, обеспечивает также хорошую стабилизацию оборотов двигателя при изменении нагрузки.
Все промышленные регуляторы, собранные на микроконтроллерах, полностью залитые эпоксидной смолой и в итоге они не пригодны для ремонта, а цена за новый регулятор достаточно большая, и составляет примерно 20-30% от стоимости самого электроинструмента.
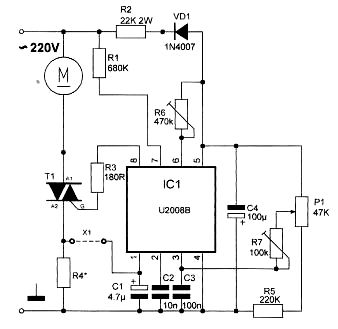
В поиске специализированных микросхем для решения данной задачи мне приглянулись регуляторы Phase Control фирмы Atmel. Например, простой вариант регулятора на микросхеме U2008B. Рассмотрим схему регулятора на ИМС U2008B приведенную на рис.1. В данном регуляторе можно использовать обратную связь по току или режим плавного пуска, однако в нём нет защиты от перегрузки. Если использовать плавный пуск тогда нужны только элементы С1, R4 и перемычку Х1 не ставим, а если нужна обратную связь — тогда все наоборот.
Так как ИMC U2008B не может одновременно работать в режиме плавного пуска и обратной связи, она не подходит для нашей задачи. На рис.2 показана схема регулятора на микросхеме U2010B, у которой есть обратная связь по току, защита от перегрузки и плавный старт одновременно. Светодиод D2 индицирует перегрузку электродвигателя. Переключатель SA1 «Mode» обеспечивает возможность выбора действий при перегрузке на двигателе в трех режимах: Положение А — индикация перегрузки и последующий сброс на минимальные обороты. Для восстановления рабочих оборотов, необходимо выключить инструмент.
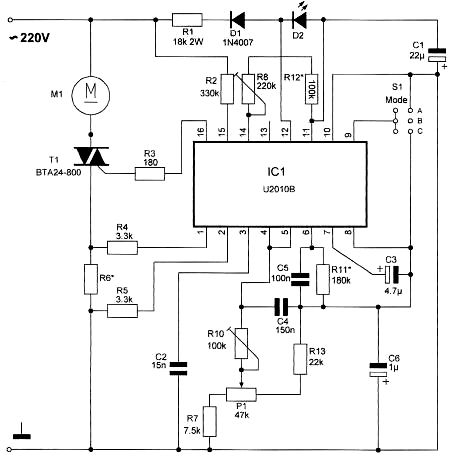
Положение В — индикация перегрузки, последующий сброс на минимальные обороты, после снятие нагрузки с инструмента, восстанавливаются установленные обороты, т.е. происходит авто старт.
Положение С — только индикация перегрузки, без остановки двигателя и защиты.
Подбором ёмкости конденсатора СЗ от 1 до 10 мкФ можно изменять длительность и плавность пуска двигателя.
Настройка регулятора.
В техническом описании к ИМС U2010B в схеме подключения обозначено только падение напряжение на R6 в 250 мВ и не указано, каким именно должен быть этот резистор.
Рассчитать сопротивление R6 можно исходя из мощности двигателя по формуле:
где:
UR6 — напряжение на R6 (250 мВ),
Рдвиг — мощность двигателя,
UПИТ — напряжение питания сети.
Например, для двигателя мощностью 750 Вт рассчитываем: R6= 0,25/(750/220) = 0,07 Ом.
Номиналы резисторов R6 и R11, в зависимости от мощности электродвигателя, приведены в таблице.
| R11 Мощность, Вт | R6*, Ом | Нихром, D 1 мм | Нихром, D 0,8 мм | R11*, кОм |
| 250 | 0,22 | 30 | 19 | 180-270 |
| 300 | 0,18 | 27 | 17 | 180-220 |
| 550 | 0,1 | 25 | 16 | 180 |
| 700 | 0,08 | 20 | 14 | 160 |
| 850 | 0,07 | 17 | 11 | 150 |
| 1000 | 0,055 | 15 | 10 | 100-120 |
| 1200 | 0,047 | 13 | 9 | 90-110 |
| 1500 | 0,04 | 12 | 8 | 80-100 |
| 1800 | 0,03 | 10 | 7 | 70-100 |
| 2000 | 0,028 | 8 | 6 | 65-90 |
| 2200 | 0,025 | 7 | 5 | 65-90 |
Главное правильно подбирать резистор R6 под мощность двигателя. Выше представленная формула правильная, но на практике может потребоваться некоторая коррекция по поведению двигателя под нагрузкой. Если резистор великоват, то двигатель довольно резко стартует (т.е. происходит большая компенсация нагрузки, чем надо), а потом отключается, а если резистор будет мал, то не будет обеспечиваться компенсация нагрузки.
В Datasheet к ИМС U2010B ёмкость конденсатора С2 указана 0,01 мкФ, но она рассчитана на 60-герцовую сеть, и при использования ИМС в сети 50 Гц за период выдавалось несколько импульсов управления. В итоге, обороты электродвигателя практически не регулировались и двигатель работал на полную мощность. Для сети с частотой 50 Гц нужно ёмкость конденсатора С2 увеличить до 0,015 мкФ.
Первый пуск
Переменный резистор Р1 (регулятор оборотов) нужно установить на минимальные обороты двигателя, по схеме движок потенциометра должен быть повернут в сторону резистора R13. Затем подстроенный резистор R10 (компенсация нагрузки) установить в среднее положение, а на место R11 (перегрузка) временно подпаять постоянный резистор сопротивлением 62 кОм. Потом включить регулятор в сеть 220 В / 50 Гц и подстроенным резистором R8 выставить самые минимальные обороты двигателя.
Нужно сделать так, чтобы при включении двигатель начинал вращаться на минимальных оборотах. Если настроить устройство так, чтобы совсем не было напряжения на электродвигателе, то тогда становится слишком нелинейная зависимость управления резистором Р1 — при его повороте сначала двигатель не крутится, а потом резко стартует без плавного пуска.
Далее нужно подключить вольтметр с диапазоном измерения 300 В к выводам двигателя, включить двигатель и на средних оборотах, зажимая вал или привод двигателя через тряпку рукой, выставить такое положение резистора R10, чтобы обороты электродвигателя не менялись при изменении нагрузки на его валу. Одновременно с этим нужно смотреть на вольтметр, подключенный к двигателю. При увеличении нагрузки на валу электродвигателя регулятор прибавляет напряжение, и двигатель крутится с одинаковыми оборотами, независимо от нагрузки.
И вот в последнюю очередь настраивается резистор R11 (перегрузка). Постоянный резистор номиналом 62 кОм выпаиваем и вместо него ставим подстроенный или переменный резистор номиналом 220 кОм. На оборотах двигателя чуть больше минимальных, сильно зажимая вал или привод двигателя, стараемся почти заклинить вал двигателя, и по степенно изменяем величину резистора R11, пока не начнет срабатывать защита, и не станет светиться VD2. Затем измерьте сопротивление переменного резистора тестером и запаяйте в устройство соответствующий резистор. В таблице указано приблизительные значения сопротивления R11,
Детали регулятора
Купить микросхемы U2008B, U2010B можно через сайт AliExpress (www.ru.aliexpress.com) в Китае с бесплатной доставкой на Украину, а далее посылка бесплатно отправляется через «Укрпочту» в любое почтовое отделение на территории Украины. Доставка на Украину производится на протяжении 25-40 дней. Например, цена 1 шт. микросхемы U2010B зависит от корпуса исполнения, примерно 0,9 USD в корпусе S016 и 1,2 USD в корпусе DIP16, а симистора ВТА24-800 — 0,4 USD.
Печатная плата устройства изготовлена из одностороннего фольгированного стеклотекстолита толщиной 1 мм.
Симистор VS1 лучше использовать с изолированной площадкой под радиатор серии ВТА, например BTA12-800, BTA16-800, BTA24-800, или применить другие. При мощности двигателя до 400 Вт, VS1 можно не устанавливать на радиатор. Все SMD детали типоразмера 1206, их можно запаять обычным паяльником с тонким жалом.
Подстроенные резисторы — типа СП3-19а или другой малогабаритный. Переменный резистор Р1 любой на 47-50 кОм, можно малогабаритные СП4-1, СП3-9. Резистор R1 мощностью не менее 2 Вт, например, типа MЛT-2 или др. Резистор R6 изготовлен из нихромовой проволоки диаметром 0,7 — 1 мм. Автор использовал нихромовый провод из старого блока сопротивлений для зажигания автомобилей ГАЗ с маркировкой 1402.3729. Все электролитические конденсаторы на напряжение не менее 50 В. Диод D1 — типа 1N4007 или КД208, также можно использовать диод в SMD исполнении. Светодиод D2 любой малогабаритний диаметром 3-5 мм красного света. Переключатель SA1 любой малогабаритный 3-х позиционный. Если нужен только один режим перегрузки, тогда вместо него можно установить перемычку.
Литература:
- Бирюков С. Автомат плавного пуска коллекторных электродвигателей. // Радио. — 1997. — №7. — С.40-42.
Печатная плата для схемы показанной на рисунке 2:
Автор: Валентин Шипляк, г. Ужгород
Схема регулятора оборотов двигателя с стабилизацией

По вопросам ремонта и другим техническим вопросам сюда. Ремонт бытовой и офисной техники.
Стабилизатор оборотов двигателя для полуавтомата второй сезон. Кубань Краснодар.
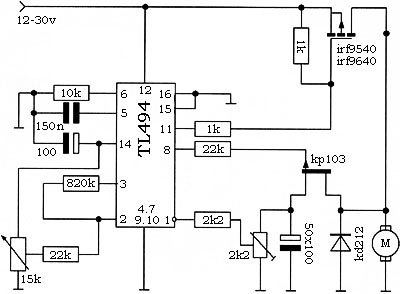
В журнале «Электрик», 3-4 номер за 2006 год, в рубрике «Инженерные решения» была опубликована простая на первый взгляд схема регулятора подачи сварочной проволоки на завоевавшей в те года популярность микросхеме TL494, автор В. П. Оноприч.
С первого взгляда бросается в глаза красота, техничность и простота конструкции, насколько все в этой схеме логично и продумано, нет ничего лишнего. Схем такого уровня встречается единицы. Ценность заложенного в нее конструкторского решения состоит в применении, для стабилизации оборотов электродвигателя, синхронного детектора. Это равносильно использованию в обратной связи, датчика оборотов двигателя, потому что возникающая индукционная ЭДС на контактах электродвигателя при отключении питания прямо пропорциональна частоте вращения ротора. Такой метод стабилизации оборотов ценен тем, что дает возможность наиболее полноценно использовать силовые возможности двигателя, потому что он не ограничивает ни ток потребления, ни напряжение питания. Если растет нагрузка на вал двигателя, то обороты поддерживаются ростом напряжения и тока до максимально возможных значений, которые может обеспечить блок питания, таким образом, используются все технические возможности двигателя.
В сочетании со специализированной микросхемой с большими функциональными возможностями эта схема выглядит еще более привлекательней. TL494 это практически специализированный микроконтроллер для полумостовых схем блоков питания, только непрограммируемый. Ее применение позволило получить максимально простое, малогабаритное устройство с очень хорошими характеристиками и повторяемостью.
Данная микросхема выпущена на рынок в 1986 году, однако широко используется и сегодня, так как сочетает высокую точность, простоту и дешевизну.
Микросхема TL494 представляет ШИМ контролер импульсного источника питания, работающий на фиксированной частоте, который включает в себя все необходимые для этого блоки. Встроенный генератор пилообразного напряжения требует для установки частоты только двух внешних компонентов R и С. Частота генератора определяется по формуле:
F=1.1/(RC) , где F — в Кило Герцах, R — в Кило Омах, С — в Микро Фарадах.
Например, рассчитаем частоту выходного каскада приведенной выше схемы.
Для стабилизаторов с таким включением регулирующего полевого транзистора частоту переключения следует выбирать в районе 500 — 1000 Герц.
- Полный набор функций ШИМ-управления
- Выходной втекающий или вытекающий ток каждого выхода …..200мА
- Возможна работа в двухтактном или однотактном режиме
- Встроенная защитная зона
- Широкий диапазон регулировки
- Выходное опорное напряжение…………………………………….5В +-05%
- Просто организуемая синхронизация
Общее описание 1114ЕУ3/4 – TL494.
Специально созданные для построения импульсных блоков питания, микросхемы TL493/4/5 обеспечивают разработчику расширенные возможности при конструировании. Приборы TL493/4/5 включают в себя усилитель ошибки, встроенный регулируемый генератор, компаратор регулировки мертвого времени, триггер управления, прецизионный ИОН на 5В и схему управления выходным каскадом. Усилитель ошибки выдает синфазное напряжение в диапазоне от -0,3…5В. Компаратор регулировки мертвого времени имеет постоянное смещение, которое ограничивает минимальную длительность мертвого времени величиной порядка 5%.
Допускается синхронизация встроенного генератора, при помощи подключения вывода R к выходу опорного напряжения и подачи входного пилообразного напряжения на вывод С, такое включение используется при синхронной работе нескольких схем ИБП.
Независимые выходные формирователи на транзисторах обеспечивают возможность работы выходного каскада по схеме с общим эмиттером либо по схеме эмиттерного повторителя. Выходной каскад микросхем TL493/4/5 работает в однотактном или двухтактном режиме, есть возможность выбора режима с помощью специального входа. Микросхема имеет защитную зону двухтактного выхода.
Приборы, имеющие суффикс L, гарантируют нормальную работу в диапазоне температур —5…85С, с суффиксом С гарантируют нормальную работу в диапазоне температур 0…70С.
Применение микросхем серии 494 и им подобных уже является правилом, но сочетание синхронного детектора с TL494, да и использование его в других схемах, пока встречается очень редко. А жаль. Современные технологии и компоненты уже давно позволяют с минимальным усложнением конструкций применять синхронные преобразователи на каждом шагу, начиная от выпрямителей напряжения, вместо диодных мостов. Они существенно повышают КПД электронных устройств и расширяют их технические возможности, примером можно привести выше изложенную схему стабилизатора оборотов двигателя.
В схеме устранены допущенные неточности и добавлены минимальные доработки.
- Полевые транзисторы серии КП 103 не все имеют P-N структуру с P каналом, точнее только КП103К, КП103Л, КП103М, все остальные типы приборов этой серии имеют P-N структуру с N каналом и не могут быть применены в этой схеме.
- В полевых транзисторов серии КП 103 максимальное напряжение сток — исток 10 -12 Вольт. При питающем напряжении 12-28 вольт эти транзисторы применять не желательно.
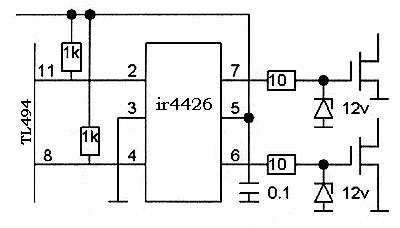
- В схеме средняя стрелка выходного транзистора должна быть соединена с истоком.
- В схеме транзистор выходного каскада микросхемы — ножка 11, работает по схеме с открытым коллектором — сопротивление R8. Для создания одинаковых режимов работы ключевых транзисторов в обоих каналах, второй транзистор — ножка 8 выходного каскада микросхемы, то же включен по схеме с открытым коллектором.
- В связи со слабой чувствительностью входов усилителей сигнала ошибки tl494, резистор обратной связи можно не ставить. Но для уменьшения влияния наводок и повышения плавности вращения вала двигателя на малых оборотазх, можно между ножками 2 и 3, микросхемы, поставить керамический конденсатор емкостью 0,1 мкФ.
- В выходном каскаде вместо IRF9640 лучше применить IRF9540, в последних у два раза больше выходной ток и гораздо меньше сопротивление открытого канала сток — исток.
- Для коммутации выбранного типа полевых транзисторов, необходимо включить выходной каскад микросхемы по схеме с открытым коллектором. Следовательно, на выводы 8 и 11 нужно подключить дополнительные резисторы, относительно плюсового провода и подать управляющие сигналы на затворы транзисторов через токоограничительные резисторы сопротивлением 20 Ом, согласно с техническими требованиями для этих транзисторов.
- Всвязи с высоким напряжением питания, для создания оптимальных условий синхронного детектирования, в канале регулировки и канале синхронного детектора применены одинаковые транзисторы.
- Для повышения надежности и коэффициента стабилизации, питание микросхемы TL494 стабилизировано на уровне 12 — 16 вольт стабилитроном Д814Д. В этих стабилитронах наименьшее дифференциальное сопротивление, это обеспечило максимальное подавление пульсаций простыми схемотехническими методами.
Подробнее о дифференциальном сопротивлении стабилитронов и использования их особенностей на практике описано в статье
После учета перечисленных пунктов, получилась схема, не уступающая по параметрам авторской, а по некоторым пунктам превосходящая их.
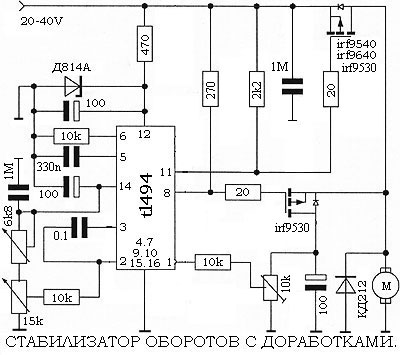
Фото готового изделия.
Работа синхронного детектора стабилизатора оборотов двигателя.
Стабилизация оборотов электродвигателя импульсным методом происходит путем периодической подачи на двигатель импульсов напряжения. Не путем плавной регулировки напряжения, а подачей всего напряжения, но частыми короткими импульсами. При этом для поддержания стабильных оборотов, достаточно регулировать частоту или длительность импульсов подаваемого напряжения, тем самым, импульсным методом регулируя количество энергии переданной двигателю, а инерционность двигателя сгладит переходные процессы.
При импульсной стабилизации всегда существуют моменты, когда на двигатель не подается напряжение питания. В эти моменты на его клеммах происходит выброс напряжения индукции, которое прямо пропорционально количеству оборотов. Это напряжение индукции преобразуется методом синхронного детектирования в постоянное, которое поступает на усилитель обратной связи. При таком методе детектирования периоды работы детектора должны быть синхронизированы сигналом управления.
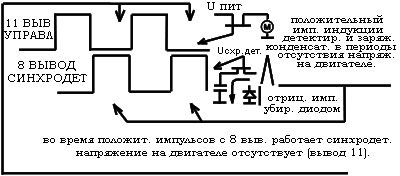
Измерительный процесс можно посмотреть на графике работы синхронного детектора.
Микросхема TL494 имеет двухтактный выход. Это значит что выходные сигналы противофазные. В моменты времени, когда открыт один выходной транзистор, другой всегда закрыт, то есть обеспечивается синхронность работы двух каналов. Это уже готовое решение к применению синхронного детектора. Когда питающий ключ закрыт — вывод 11, на выводе — 8 присутствует положительный импульс, открывающий ключ синхронного детектора. Ключ детектора открывается в моменты времени, когда двигатель обесточен, возникающее в эти промежутки напряжение индукции, через открытый транзистор, заряжает измерительный конденсатор. На конденсаторе накапливается, и сохранятся напряжение заряда, а величина емкости сглаживает импульсную составляющую и обеспечивает плавность изменения напряжения. Напряжение с измерительного конденсатора поступает в инверсный линейный канал обратной связи микросхемы, получается плавный регулятор оборотов. При увеличении напряжения на измерительном конденсаторе — уменьшается напряжение на клеммах двигателя и наоборот.
Транзистор для синхронного детектора.
В синхронном детекторе можно применять как биполярные, так и полевые транзисторы, с внутренним диодом и без него. Полевые транзисторы лучше использовать с изолированным затвором — МДП транзисторы. МДП структура это металл — диэлектрик — полупроводник. То же самое МОП транзисторы, металл — оксид — полупроводник.
По структуре и принципу действия МДП транзисторы имеют более высокую температурную стабильность и значительно надежнее защищены от перегрузок по току, потому что при повышении температуры внутреннее сопротивление транзистора повышается.
Структура МДП транзисторов является симметричной. У них вход и выход можно менять местами, характеристики приборов при этом останутся неизменными. Поэтому, если в синхронном детекторе применить МДП транзистор с внутренним диодом, то включать такой транзистор нужно так, чтобы больший положительный потенциал цепи питания электродвигателя не проходил в цепь измерительного конденсатора. Если посмотреть на процесс заряда с другой стороны, то наличие диода, при правильном включении транзистора, даст ускорение реакции схемы на один период рабочей частоты, при резкой потере оборотов валом двигателя. При потере оборотов, на двигателе будет сразу напряжение меньше, чем на измерительном конденсаторе, диод откроется, и конденсатор быстро разрядится до напряжения цепи двигателя, что мгновенно, не дожидаясь фазы включения синхронного детектора, приведет к увеличению напряжения стабилизации.
Повышение мощности стабилизатора.
В р-канальных транзисторах протекание тока осуществляется за счет движения неосновных носителей заряда — положительно заряженных дырок. Это намного снижает быстродействие Р-канального транзистора по сравнению с N-канальным и повышает его сопротивление в открытом состоянии. К тому же, при одинаковых токах стока, Р-канальные транзисторы имеют значительно большую площадь кристалла, а значит и цену.
По этим причинам полевые транзисторы с Р каналом имеют малый ассортимент для выбора, имеют ограниченную мощность и реже применяются, поэтому не везде их можно купить особенно это касается мощных экземпляров.
Для увеличения мощности лучше применять полевые транзисторы с N каналом. В транзисторах с N каналом протекание тока осуществляется за счет движения основных носителей заряда — отрицательно заряженных электронов. Поэтому транзисторы с N каналом имеют в десятки раз больший выбор номиналов и такой же рейтинг применяемости. Мощность этих транзисторов практически не ограничена, без труда можно выбрать подходящий экземпляр.
Поскольку полевой транзистор по управлению не токовый, а потенциальный прибор, ему необходимы схемы управления, рассчитанные для быстрого перезаряда входных емкостей затвора.
При выходном каскаде как в TL494, управлять полевым транзистором не рационально, и 200мА коллекторного тока не всегда достаточно для управления мощными транзисторами.
Вот варианты управления полевым транзистором с N каналом.
Конденсатор номиналам 1500 рФ это емкость затвора, на самом деле емкость затвора это динамическая величина. Она велика при малых напряжениях и быстро уменьшается при больших.
Чтобы открыть полевой транзистор нужно быстро зарядить его входную емкость до напряжения насыщения 8 — 12 Вольт. Чтобы закрыть — быстро разрядить входную емкость до напряжения отсечки. Главная задача схемы управления сделать этот процесс достаточно быстрым.
На рисунке приведен ряд схем управления затвором полевого транзистора. Первая – схема с общим эмиттером, вторая — эмиттерный повторитель и третья, комплементарный повторитель – внизу. Каждая имеет свои преимущества и недостатки.
По сигналу управления видно, что лучший вариант управления это последний — внешний комплементарный повторитель. При таком варианте управления сильно сокращаются переходные процессы в моменты открывания и закрывания. Это увеличивает КПД, повышает надежность работы и уменьшает тепловые потери. Резистор в цепи затвора ограничивает скорость переходных процессов до безопасной для транзистора величины.
Еще более лучший вариант, это применять для управления полевыми транзисторами специализированные драйвера. В них с помощью дополнительной емкости реализовано динамическое управление затвором. Это позволяет получить оптимальный режим коммутации, оптимизировать скорость нарастания и скорость спада управляющего импульса, что позволяет добиться максимально короткого времени срабатывания.
Скорость нарастания и спада управляющих импульсов должна быть не слишком большой и не слишком маленькой.
Укорочение фронтов и спадов управляющих импульсов приводит к перегрузкам канала управления и самого транзистора. Это следствие эффекта Миллера.
Рабочие процессы полевых транзисторов с изолированным затвором, зарубежные названия MOSFET и IGBT транзисторы, очень хорошо описаны в статье «Разработка и применение высокоскоростных схем управления силовыми полевыми транзисторами».
«Разработка и применение высокоскоростных схем управления силовыми полевыми транзисторами».
Как раз то, что нужно, изучите, не пожалеете!
Несколько слов об эффекте Миллера.
В полевом транзисторе существуют взаимосвязанные технологические емкости Затвор — Сток, Затвор — Исток, Затвор — Подложка. При коммутации, на емкость Затвор — Подложка, влияют емкости Затвор — Сток и Затвор — Исток.
Эффект Миллера, это влияние на емкость затвора емкостей стока и истока.
В итоге, затягивание фронтов и спадов управляющих импульсов значительно увеличивает коммутационные потери и может вызвать большие паразитные всплески напряжения, вызываемые перезарядом емкости стока, особенно это опасно для высоковольтных транзисторов.
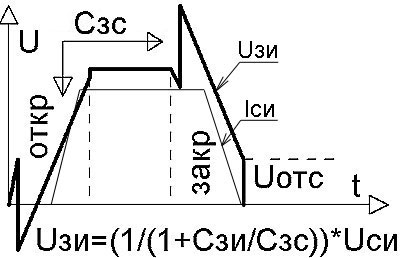
Приблизительно, без учета влияния входных цепей, оценить напряжение на затворе при перезаряде внутритразисторных емкостей можно по формуле соотношений емкостей или зарядов.
Если соотношение Qз/Qзс=4/1, а Uси=250v, то по формуле получим Uзи=50v.
В данном случае расчетное значение напряжения Uзи, по этой формуле превышает паспортное значение, тогда при расчете цепей управления нужно применить следующие меры.
Поставить в цепи управления более мощные, с малым выходным сопротивлением и токами насыщения ключи.
Применить более мощный, или с малым внутренним сопротивлением — это одно и то же, источник питания цепей затвора.
Сопротивление омного резистора в цепи управления затвора должно быть в районе 20-50 Ом, и не превышать рекомендованные производителем номиналы.
Все эти опасные моменты автоматически исключаются при применении специализированных драйверов управления затворами полевых транзисторов. А при самостоятельном расчете схем управления нужно помнить, что в ключевых схемах именно в переходные моменты наиболее негативно сказываются на работе и существенно понижают рабочие параметры и строки службы узлов.
Приблизительно оценить увеличение входного заряда и емкости транзистора из — за эффекта Миллера можно по формуле.
Относительно входных емкостей.
Кu = Uвых/Uвх = Uс/Uз = SRн — коэффициент усиления.
Или относительно входных зарядов.
Кu = Uвых/Uвх = Uс/Uз = SRн — коэффициент усиления.
S — крутизна характеристики, она же Gfs — Forvard Transconductance — зависимость тока стока от напряжения на затворе. Измеряется в А/В (Ампер на Вольт). Для расчета крутизны характеристики часто приводится графики.
Рассчитаем увеличение заряда на примере транзистора IRF540, Rн = 3 Ома.
30=346 – более чем в 100 раз.
Подробнее об эффекте Миллера можно прочитать в статье
По параметрам справочных данных можно приблизительно рассчитать величины не только внутренних емкостей и зарядов. Вот ряд формул, необходимых для расчетов.
t=CR — постоянная времени интегрирования и дифференцирования.
При расчетах режимов управления полевыми транзисторами, лучше пользоваться величинами входных зарядов, а не величинами входных емкостей. Ток заряда RC цепи изменяется нелинейно, по экспоненциальному закону, поэтому для точности расчетов надо брать параметр «Заряд конденсатора», так называемый показатель интегральной характеристики процессов.
Заряд затвора приводится в документации на все транзисторы в качестве обязательного параметра и обозначается Qg, измеряется в нано Кулонах (nC). При этом, должны быть указаны режимы транзистора, при которых производились замеры.
Обычно в документации на транзисторы указываются три типа зарядов.
Общий заряд затвора.
Заряд затвор – исток.
Заряд затвор – сток, он же создающий эффект Миллера.
Например, для транзистора IRF9540 мы имеем.
Q(g) (Total Gate Charge) — 61nC, при I(d)=19A; V(ds)=80V; V(gs)=10V.
Q(gs) (Gate-to-Source Charge) — 14nC, при I(d)=19A; V(ds)=80V; V(gs)=10V.
Q(gd) (Gate-to-Gain «Miller» Charge) — 29nC, при I(d)=19A; V(ds)=80V;
V(gs)=10V.
Если применять в качестве силового элемента полевой транзистор, необходимо знать какие токи будут коммутировать транзисторы управляющего каскада.
Приблизительный расчет режимов управления может быть следующим.
Возьмем транзистор IRF540. У него полный заряд затвора 40нК, при 10v на затворе, 80v на стоке и 30А на нагрузке.
Q(g) (Total Gate Charge) — 40nC, при I(d)=30A; V(ds)=80V; V(gs)=10V.
Q(gs) (Gate-to-Source Charge) — 6nC, при I(d)=30A; V(ds)=80V; V(gs)=10V.
Q(gd) (Gate-to-Gain «Miller» Charge) — 10nC, при I(d)=30A; V(ds)=80V;
V(gs)=10V.
Рассчитаем время включения / выключения.
Рассчитаем величину заряда затвора от эффекта Миллера по формуле.
где Ку=SRн, коэффициент усиления = крутизна ВАХ * Rн.
S — крутизна характеристики, она же Gfs — Forvard Transconductance — зависимость тока стока от напряжения на затворе. Измеряется в А/В (Ампер на Вольт). Для расчета крутизны характеристики часто приводятся графики.
Чем круче прямая S, тем больший Ку.
В полевых транзисторах длительность коммутационных процессов прямо пропорциональна сопротивлению нагрузки. Для определения Rн, необходимо определить, какие двигатели могут подключаться к стабилизатору.
Этот стабилизатор предназначен для двигателя подачи сварочной проволоки. В качестве такого двигателя в сварочных полуавтоматах часто используется электродвигатели, предназначенные для дворников автомобиля.
У двигателя для дворников с рабочим напряжением 12v током потребления около 4А, внутреннее сопротивление около 0,8 Ом.
Сделаем запас на прочность, возьмем минимальное сопротивление нагрузки 2 Ом.
Рассчитаем эквивалент заряда затвора от эффекта Миллера на примере транзистора IRF540, Rн = 2 Ом.
От эффекта Миллера, на затворе будет заряд равный 270нКл, при нагрузке 2 Ом.
Рассчитаем время включения / выключения с учетом эффекта Миллера.
Tвкл=Tвыкл=(QзRз)/Uз, нано Кулоны необходимо перевести в Кулоны, nC=1*10^-9.
T=((270*10^-9)20)/12= 4500nS = 4,5 микросекунды.
Многовато будет, уменьшим сопротивление в управляющей цепи затвора до 10 Ом.
T=((270*10^-9)10)/12= 2300nS = 2,3 микросекунды.
Из длительности периодов можно определить максимально возможную рабочую частоту.
FкГц=1/(10(t*2)), или FкГц=1/(10(t1+t2)).
Из формулы пересчета периода в частоту имеем.
Найдем импульсные токи открытия / закрытия полевого транзистора.
270nC/2300ns=120mA — предполагаемый импульсный ток открытия / закрытия.
Проверим, какой величины будут максимально возможные паразитные импулсы на затворе.
Соотношение емкостей затвора можно приравнять к пропорциональным величинам его зарядов.
Если у нас Uзи = 12v, то прибавка в 10v терпима.
Для этой схемы Rз можно выбирать из других соображений, например, для ограничения импульсного тока управления.
Теперь перейдем к микросхеме TL494.
Рассчитаем частоту выходного сигнала TL494.
F=1.1/(RC), , где F — в Кило Герцах, R — в Кило Омах, С — в Микро Фарадах.
Смотрим какие характеристики минимального выходного импульса микросхемы TL494.
Output Voltage Rise Time 100ns — длительность открытия,
Output Voltage Fall Time 40ns — длительность закрытия.
Минимальная длительность рабочего импульса будет 140+40=140ns.
Переведем длительность импульса в частоту.
Частота будет 358кГц.
Типовая частота коммутирующих импульсов по паспортным данным — 40кГц.
Но нам нужно выбирать такую тактовую частоту задающего генератора, при которой длительность выходных самых коротких импульсов микросхемы не была бы меньше 2,3-2,5 микросекунды — минимальное время включения / выключения полевого транзистора с учетом эффекта Миллера. Больше можно.
При широтно — импульсной модуляции длительность управляющих импульсов меняется обычно в 10 раз. Если нет осциллографа, можно минимальное время импульса брать равное импульсу мертвой зоны. В TL494 рабочий импульс не может быть короче импульса мертвой зоны. Из характеристик микросхемы следует, что компаратор регулировки мертвого времени имеет постоянное смещение, которое ограничивает минимальную длительность мертвого времени величиной порядка 5%.
Для этого, максимальную частоту коммутации полевым транзистором, порядка 22 кГц, делим на 100 и множим на 5, получаем 1,1 кГц.
Частота 1,1 кГц есть 5% от максимально допустимой с учетом возможного укорочения импульса схемой ШИМ модуляции.
Для нормальной работы схемы стабилизатора, частота задающего генератора не должна превышать 1100 Гц. У нас 730 Гц.
Так как основная токовая нагрузка коммутируется внешними транзисторами, применяемые транзисторы должны быть быстродействующими, предназначены для работы в импульсных схемах, иметь достаточный запас по параметрах, малые токи насыщения.
Для удовлетворительной работы транзисторы внешнего комплементарного повторителя должны иметь многократный запас по параметрам. Следовательно, они должны иметь быстродействие не более 1нс, импульсный ток коллектора около 1,2А.
Например, транзисторы КТ644+646.
Разводка печатной платы должна быть выполнена с учетом минимизации емкости и индуктивности монтажа. Коллекторы транзисторов буферных каскадов, должны быть зашунтированы блокировочными керамическими конденсаторами, емкостью порядка 0,1 мкФ.
В качестве еще более мощного ключа можно применить полевые транзисторы IRFI1010, IRF2807.
Здесь еще раз стоит сказать, что при таких входных емкостях, лучше применять специализированные драйвера управления, особенно если управлять транзистором IRF2807.
Успеха в творчестве.
С ув. Белецкий А. И. 12.11.2011. Кубань Краснодар.







