- Как сделать регулятор оборотов коллекторного двигателя 220В своими руками: схемы
- Зачем они нужны
- Коллекторные электродвигатели
- Регуляторы оборотов
- Стандартные схемы
- Модифицированная схема
- Простой самодельный регулятор
- Регулятор оборотов электродвигателя 220в без потери мощности
- Виды двигателей и принцип работы
- Устройство коллекторного двигателя
- Типы регулировки
- Регулятор оборотов бесколлекторного двигателя своими руками
- Для чего нужен частотный преобразователь оборотов
- Область применения
- Выбираем устройство
- Устройство ПЧ
- Виды устройств
- Прибор триак
- Преобразователи на электронных ключах
- Процесс пропорциональных сигналов
- Зачем нужен регулятор оборотов
- Принцип работы регулятора оборотов
- Как выбрать регулятор
- Как сделать самодельный регулятор оборотов двигателя
Как сделать регулятор оборотов коллекторного двигателя 220В своими руками: схемы
Схема регулятора оборотов коллекторного двигателя 220в бывает двух типов стандартная и модифицированная. Все зависит непосредственно от регулятора, который вы используете.
Зачем они нужны
 Множество бытовых приборов и электроинструментов не обходятся без коллекторного электродвигателя. Такая популярность подобного электродвигателя обусловлена универсальностью.
Множество бытовых приборов и электроинструментов не обходятся без коллекторного электродвигателя. Такая популярность подобного электродвигателя обусловлена универсальностью.
Для коллекторного электродвигателя может использование питание от тока постоянного или переменного напряжения. Дополнительным преимуществом является эффективный пусковой момент. При этом работа от постоянного или переменного тока электродвигателя сопровождается высокой частотой оборотом, что подходит далеко не всем пользователям. Чтобы обеспечить более плавный пуск и иметь возможность настраивать частоту вращения, используется регулятор оборотов. Простой регулятор вполне можно изготовить своими руками.
Но прежде чем будет обсуждаться схема, сначала нужно разобраться в коллекторных двигателях.
Коллекторные электродвигатели
Конструкция любого коллекторного двигателя включает несколько основных элементов:
Работа стандартного коллекторного электродвигателя основана на следующих принципах.
- Осуществляется подача тока от источника напряжения 220в. Именно 220 Вольт является стандартным напряжением бытовой сети. Для большинства приборов с электромоторами более 220 Вольт не требуется. Причем подача тока идет на ротор и статор, которые соединяются один с другим.
- В результате подачи тока от источника 220в образуется поле магнитное.
- Под воздействием магнитного напряжения начинается вращение ротора.
- Щетки осуществляют передачу напряжения непосредственно на ротор устройства. Причем щетки обычно изготавливают на основе графита.
- Когда направление тока в роторе или статоре меняется, вал вращается в обратную сторону.
Кроме стандартных коллекторных электродвигателей, существуют другие агрегаты:
- Электромотор последовательного возбуждения. Их устойчивость к перегрузкам более внушительная. Часто встречаются в бытовых электроприборах,
- Устройства параллельного возбуждения. У них сопротивление не отличается большими показателями, количество витков существенно больше, чем у аналогов,
- Однофазный электромотор. Его очень легко изготовить своими руками, мощность на приличном уровне, а вот коэффициент полезного действия оставляет желать лучшего.
Регуляторы оборотов
Теперь возвращаемся к теме регулятора оборотов. Все доступные сегодня схемы можно разделить на две большие категории:
- Стандартная схема регулятора оборотов,
- Модифицированные устройства контроля оборотов.
Разберемся в особенностях схем подробнее.
Стандартные схемы
Стандартная схема регулятора коллекторного электромотора имеет несколько особенностей:
- Изготовить динистор не составит труда. Это важное преимущество устройства,
- Регулятор отличается высокой степенью надежности, что положительно сказывается в течение его периода эксплуатации,
- Позволяет комфортно для пользователя менять обороты двигателя,
- Большинство моделей основаны на тиристорном регуляторе.
Если вас интересует принцип работы, то такая схема выглядит довольно просто.
- Заряд тока от источника 220 Вольт идет к конденсатору.
- Далее идет напряжение пробоя динистора через переменный резистор.
- После этого происходит непосредственно сам пробой.
- Симистор открывается. Этот элемент несет ответственность за нагрузку.
- Чем выше окажется напряжение, чем чаще будет происходить открытие симистора.
- За счет подобного принципа работы происходит регулировка оборотов электродвигателя.
- Наибольшая доля подобных схем регулировки электродвигателя приходится на импортные бытовые пылесосы.
- Но при использовании стандартной схемы регулятора оборотов важно понимать, что он обратной связью не обладает. И если с нагрузкой произойдут изменения, обороты электродвигателя придется настраивать.
Модифицированная схема
Прогресс не стоит на месте. Несмотря на удовлетворительные характеристики стандартной схемы регулятора оборотов двигателя, усовершенствования никому еще не навредили.
Наиболее часто применяемыми схемами являются две:
- Реостатная. Из названия становится очевидно, что здесь основой выступает реостатная схема. Такие регуляторы высокоэффективные при смене количества оборотов электродвигателя. Высокие показатели эффективности объясняются использованием силовых транзисторов, отбирающих часть напряжения. Так меньшее количество тока из источника 220 Вольт поступает на двигатель, ему не приходится работать с большой нагрузкой. При этом схема имеет определенный недостаток большое количество выделяемого тепла. Чтобы регулятор работал длительное время, для электроинструмента потребуется активное постоянное охлаждение,
- Интегральная. Для работы интегрального устройства регулирования используется интегральный таймер, который отвечает за нагрузку на электродвигатель. Здесь могут быть задействованы всевозможные транзисторы. Это обусловлено наличием микросхемы в конструкции с большими параметрами выходного тока. При нагрузке менее 0,1 Ампер, все напряжение идет непосредственно на микросхему, обходя транзисторы. Чтобы регулятор работал эффективно, на затворе требуется наличие напряжения в 12 Вольт. Из этого вытекает, что электрическая цепь и напряжение питания обязаны отвечать данному диапазону.
Простой самодельный регулятор
Если вы не хотите покупать готовый регулятор оборотов для двигателя, его вполне можно попробовать изготовить своими руками для контроля мощности устройства.
Это дополнительные навыки для вас и определенная экономия средств для кошелька.
Для изготовления регулятора вам потребуется:
- Набор проводков,
- Паяльник,
- Схема,
- Конденсаторы,
- Резисторы,
- Тиристор.
Монтажная схема будет выглядеть следующим образом.
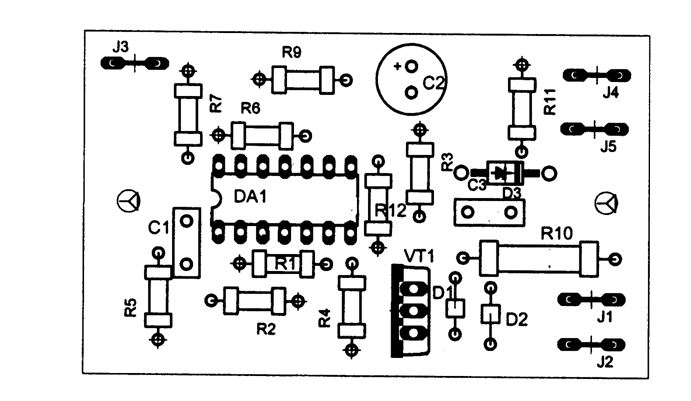
Согласно представленной схеме, регулятор мощности и оборотов будет контролировать 1 полупериод. Расшифровывается она следующим образом.
- Питание от стандартной сети 220в поступает на конденсатор. 220 Вольт стандартный показатель бытовых розеток.
- Конденсатор, получив заряд, вступает в работу.
- Нагрузка переходит к нижнему кабелю и резисторам.
- Положительный контакт конденсатора соединяется с электродом тиристора.
- Идет один достаточный заряд напряжения.
- Второй полупроводник при этом открывается.
- Тиристор через себя пропускает полученную от конденсатора нагрузку.
- Происходит разряжение конденсатора, и полупериод вновь повторяется.
При большой мощности электродвигателя, питающегося от постоянного или переменного тока, регулятор дает возможность применять агрегат более экономично.
Самодельные регуляторы оборотов имеют полное право на свое существование. Но когда речь заходит о необходимости использовать регулятор электродвигателя для более серьезного оборудования, рекомендуется купить готовое устройство. Пусть оно обойдется дороже, но вы будете уверены в работоспособности и надежности агрегата.
Регулятор оборотов электродвигателя 220в без потери мощности

Практически во всех бытовых приборах и электроинструментах используется коллекторныйдвигатель. В более новых моделях болгарок, шуруповертов, ручных фрезеров, пылесосов, миксеров и других присутствует регулировка оборотов двигателя, но в более поздних моделях такой функции нет. Такими инструментами и бытовыми приборами не всегда удобно работать, и поэтому существуют регуляторы оборотов с поддержанием мощности.
Виды двигателей и принцип работы
Двигатели делятся на три типа: коллекторный, асинхронный и бесколлекторный. В большинстве электроинструментов стоит первый тип. Этот электродвигатель имеет довольно компактный размер. Его мощность значительно выше, чем у асинхронного, а цена довольно низкая. Что касается асинхронных, то этот тип в основном используется в металлообрабатывающей отрасли, а также широкое распространение они получили в угледобывающих шахтах. Довольно редко их можно встретить в быту.
Бесколлекторный электродвигатель используется там, где нужны большие обороты, точное позиционирование и малые размеры. Например, в различной медицинской технике, авиамоделировании. Принцип работы довольно прост. Если рамку прямоугольной формы, которая имеет ось вращения, поместить между плюсами постоянного магнита, то она начнет вращаться. Направление зависит от направления тока в рамке. В составе этого типа присутствуют якорь и статор. Якорь вращается, а статор стоит неподвижно. Как правило, на якоре стоит не одна рамка, а 4,5 или более.
Асинхронный двигатель работает по другому принципу. Благодаря эффекту переменного магнитного поля в статорных катушках он приводится во вращение. Если углубиться в курс физики, то можно вспомнить, что вокруг проводника, через который проходит ток, создается своеобразное магнитное поле, заставляющее вращаться ротор.
Принцип работы бесколлекторного типа основан на включении обмоток так, чтобы магнитные поля статора и ротора были ортогональны друг другу, а вращающий момент регулируется специальным драйвером.
На рисунке отчетливо видно, что для перемещения ротора нужно выполнить необходимую коммутацию, но и регулировать обороты не представляется возможным. Тем не менее бесколлекторный двигатель может очень быстро набирать обороты.
Устройство коллекторного двигателя
Коллекторный электродвигатель состоит из статора и ротора. Ротором называется часть, которая
вращается, а статор является неподвижным. Еще одной составляющей электродвигателя являются графитовые щетки, по которым ток течет к якорю. В зависимости от комплектации могут присутствовать датчики Холла, которые дают возможность плавного запуска и регулировки оборотов. Чем выше подаваемое напряжение, тем выше обороты. Этот тип может работать как от переменного, так и от постоянного тока.
По классификации коллекторные двигатели можно разделить на те, что работают от переменного и от постоянного тока. Их также можно разделить по типу возбуждения обмотки: двигатели с параллельным, последовательным и смешанным (параллельно-последовательным) возбуждением.
Типы регулировки
Существует довольно много вариантов регулировки оборотов. Вот основные из них:
- Блок питания с регулировкой выходного напряжения.
- Заводские устройства регулировки, которые идут изначально с электромотором.
- Регуляторы на кнопочном управлении и стандартные регуляторы, которые просто ограничивают напряжение.
Эти типы регулировки плохи тем, что с уменьшением или увеличением напряжения падает и мощность. В некоторых электроинструментах это допустимо, но, как показывает практика, в большинстве случаев это является неприемлемым из-за сильного падения мощности и, соответственно, КПД.
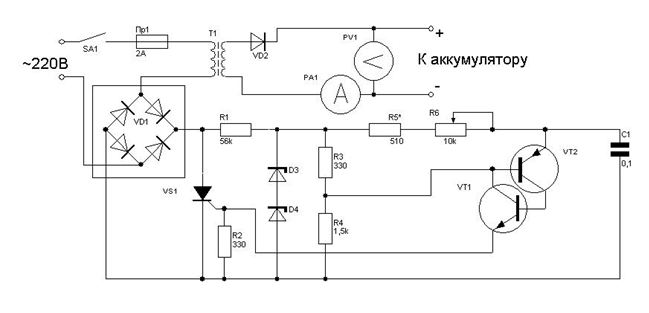
Наиболее приемлемым вариантом будет регулятор на основе симистора или тиристора. Мало того что такой регулятор не уменьшает мощность при уменьшении напряжения, он еще и позволяет осуществлять более плавный пуск и регулировку оборотов. К тому же такую схему можно сделать своими руками. Ниже изображен регулятор оборотов с поддержанием мощности. Схема собрана на базе симистора BTA 41 800 В.
Все номиналы электроэлементов обозначены на схеме. Это схема после сборки, работает довольно стабильно и обеспечивает плавную регулировку коллекторного двигателя. При уменьшении выходного напряжения мощность не уменьшается, что является весомым плюсом.
При желании можно собрать регулятор оборотов коллекторного двигателя 220 В своими руками. Эта схема собрана на базе симистора ВТА26−600, который предварительно необходимо установить на радиатор, так как при нагрузке этот элемент довольно сильно греется.
К готовой схеме возможно подключить электромотор, мощность которого не превышает 4 кВт.
Схема выглядит следующим образом.
Она успешно справится с регулировкой таких электроинструментов, как дрель, болгарка, циркулярка, лобзик. При желании можно использовать схему в качестве регулятора мощности ТЭН-ов, обогревателей и в качестве диммера. К минусам можно отнести невозможность регулировки мощности приборов, которые питаются от постоянного тока.
Регулятор оборотов бесколлекторного двигателя своими руками

Стабилизирующий подвес для камеры своими руками. Часть 1.
Ниже речь пойдёт про управление низкооборотными трёхфазными бесколлекторными моторами в статичном режиме с использованием трёхфазного моста L6234.
Но сначала немного теории.
Что такое бесколлекторные моторы?
Как следует из названия, эти моторы у которых отсутствует щёточно-коллекторный узел. На вращающейся части – роторе – расположены постоянные магниты. На неподвижной части – статоре – обмотки электромагнитов. В движение такой мотор приводится изменением тока на разных фазах. Одним из примеров таких моторов являются шаговые двигатели. Изменение электрических фаз приводит к смещению ротора на строго предопределённый угол – один шаг.
Также есть моторы, рассчитанные на постоянное вращение. Например, двухфазные бесколлекторные моторы используются в компьютерных вентиляторах. Трёхфазные моторы используются в моделировании, а также в приводе электрических велосипедов и скутеров.
Отсутствие скользящих контактов щёток позволяет достигать большой мощности и долговечности.
Рассмотрим типичный трёхфазный мотор, используемый в авиамоделировании.
Если ротор с магнитами расположен внутри кольца, образованного электромагнитными катушками, то такой мотор называют inrunner, такие моторы чаще используются в автомоделизме. В авиамоделизме популярна обратная компоновка: корпус ротора с кольцом магнитов вращается вокруг статора с электромагнитами (см. рисунок).

Эти моторы также подразделяются по количеству электромагнитов и количеству полюсов. Наиболее распространённая компоновка 12N14P что означает наличие 12 обмоток статора и 14 магнитных полюсов на роторе. Число полюсов всегда кратно 2: ведь полюса бывают только двух типов – северный и южный. Число обмоток кратно трём, поскольку двигатель трёхфазный. На схеме показана намотка обмоток. A B C – намотка соответствующей обмотки в одну сторону, -a -b -c – в противоположную.
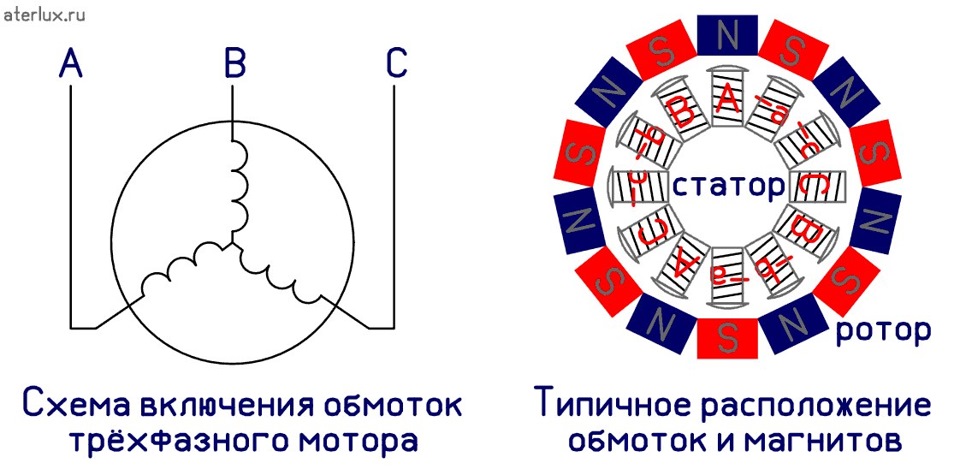
В большинстве случаев обмотки соединяются «звездой», как показано на схеме. Подавая попарно на выходы напряжение той или иной полярности, контроллер мотора пробегает полный электрический цикл, состоящий из 6 смен полярностей. За этот цикл ротор проворачивается на два магнитных полюса. То есть, в нашем случае, чтобы мотор совершил один оборот, электрические фазы должны пройти 7 полных циклов.
Для электрической коммутации используются трёхфазные мосты, представляющие из себя три блока (полумоста), в каждом из которых по два транзистора – на плюс и на минус. Для управления мотором на одном из трёх полумостов выбирается «плюс», на другом «минус», а третий остаётся отключенным. При помощи ШИМ, транзисторы импульсами коммутируют фазу двигателя к выбранной полярности, пока он не провернётся на нужный угол. Затем схема коммутации меняется. Микроконтроллер в плате управления двигателем определяет моменты, когда фазы должны быть переключены. Для этого используются либо установленные на моторе датчики Холла, либо же ЭДС, возникающая в проводе свободной фазы.
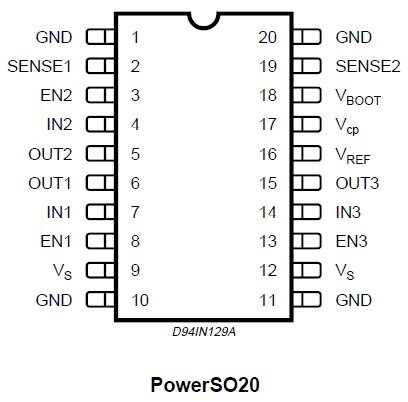
Для управления маломощными моторами годится трёхфазный мост L6234.
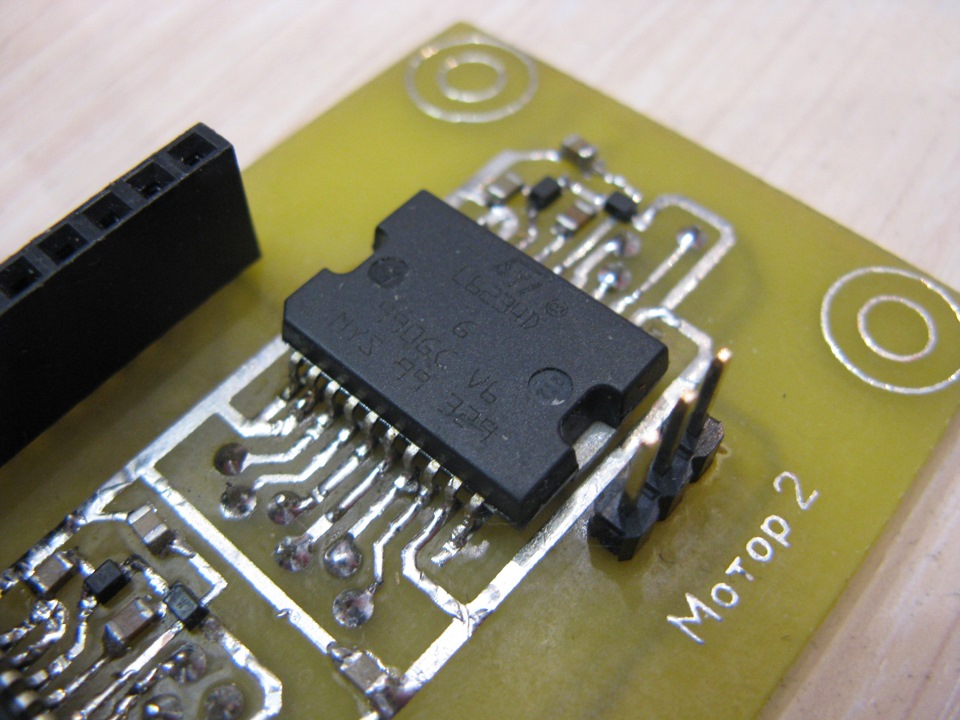
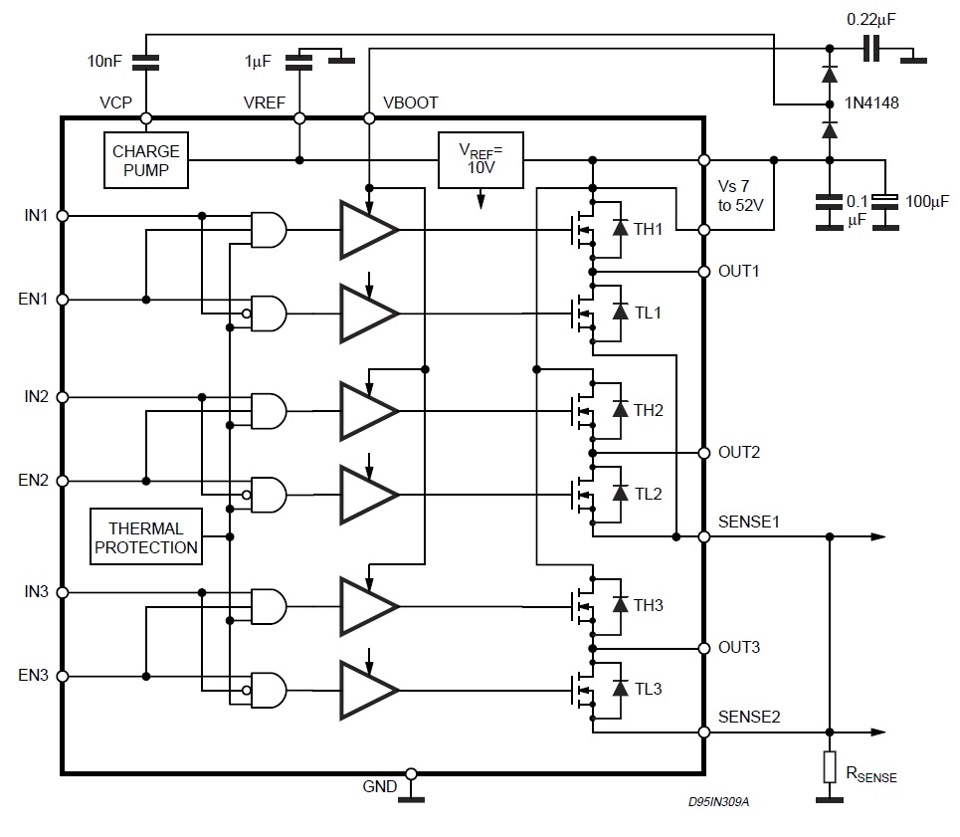
L6234 представляет собой сборку в одном корпусе трёх полумостов, на двух n-МОП транзисторах каждый, драйверов к ним и схемы подкачки напряжения для верхнего ключа. Каждый полумост управляется значениями на двух входах: один из них выбирает полярность (коммутировать плюс, или минус), а второй включает, или отключает полумост. Для управления высокоскоростными моторами вход включения можно использовать для контроля мощности при помощи ШИМ.
Максимальный ток, на который рассчитана микросхема — 4 Ампера.
Обмотки высокооборотистых моторов наматываются пучком толстой проволки, небольшим числом витков, порядка 10-20. Они обладают очень маленьким сопротивлением постоянному току, сила тока достигает десятков Ампер, и если мотор не вращается, обмотка может перегретсья и перегореть.
Но существует разновидность таких моторов, которые предназначены для работы в статичном положении. Их обмотки наматываются большим числом витков (порядка 100) тонкой проволкой. Подавая различные значения напряжений на входы, можно создать в его обмотках магнитное поле нужной полярности, и тем самым зафиксировать его в нужном положении.

Такие моторы представляют собой промежуточное звено между шаговыми двигателями и высокоскоростными моторами: они позволяют статично фиксировать произвольное положение, но не ограничены определёнными «шагами». Используются, в основном, в стабилизирующих подвесах для видеокамер в аэровидеосъёмке. По-английски такие подвесы называются gimbal (=универсальный шарнир), а моторы так и называют gimbal motor.
Для управления можно использовать тот же самый трёхфазный мост L6234. На входы включения (ENx) подаётся постоянный высокий уровень, то есть все три полумоста постоянно включены. А вот входы выбора полярности (INx) подключаются к ШИМ-выходам микроконтроллера. В микроконтроллерах типа ATmega48/88/168/328 и т.п. можно настроить 6 ШИМ-выходов, а значит, управлять сразу двумя такими моторами.
Очень важно, чтобы все ШИМ выходы работали синфазно. То есть, если каждый ШИМ настроен на одно и то же значение, то переключаться они должны строго одновременно. L6234 позволяет коммутировать на частоте до 50кГц, поэтому, для плавной бесшумной работы, можно смело настраивать ШИМ выходы МК на максимальную частоту. При частоте МК 8 МГц и phase-correct режиме выхода, частота ШИМ составит 15 686 Гц.
Для синхронизации таймеров в ATmega48/88/168/328 можно воспользоваться регистром GTCCR, который остановит счёт таймера. Ниже пример настраивающий все 6 ШИМ выходов синфазно. Timer1 при этом работает в 8-битном режиме:
GTCCR = (1 « TSM) | (1 « PSRASY) | (1 « PSRSYNC); // Блокировка счёта
OCR0A = 0;
OCR0B = 0;
OCR1A = 0;
OCR1B = 0;
OCR2A = 0;
OCR2B = 0;
TCCR0A = 0b10100001;
TCCR0B = 0b00000001;
TCNT0 = 0;
TCCR1A = 0b10100001;
TCCR1B = 0b00000001;
TCNT1 = 0;
TCCR2A = 0b10100001;
TCCR2B = 0b00000001;
TCNT2 = 0;
(1 « TSM); // Разблокировка и одновременный запуск таймеров
Если на все 3 ШИМ выхода, управляющие одним мотором, подаётся одно и то же значение, то, хотя полярность каждого моста быстро меняется почти 16 тысяч раз в секунду, поскольку это происходит одновременно, ток через обмотки не идёт. Но если значение ШИМ хоть одного вывода отличается от остальных, то появляется небольшой промежуток времени, когда разные фазы коммутируются с разной полярностью, и через обмотки идёт ток. Чем больше разница значений ШИМ, тем большую часть времени ток будет идти.
Для того, чтобы зафиксировать мотор в нужном положении, значения ШИМ должны быть пропорциональны синусу, со смещением на треть периода (т.е. на 2/3*Pi).
Иначе говоря, значение ШИМ для i-й (от 0 до 2) фазы мотора можно вычислить по формуле:
PWM(i) = 128 + sin(A+ i * 2 / 3 * Pi) * P
Где P – выдаваемая мощность (до 127), A – электрический угол. Изменяя A можно добиться поворота мотора на определённый угол. Напомню, что изменение электрического угла на полный цикл, приводит к повороту мотора на два магнитных полюса. В схеме с 14 магнитами для целого оборота потребуется 7 циклов смены электрического угла
Если вещественную арифметику заменить на целочисленную, а значения синуса хранить в таблице, то скорости МК вполне хватит на управление такими моторами.
Для плавности увеличения и уменьшения скорости вращения вала существует специальный прибор –регулятор оборотов электродвигателя 220в. Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы – преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
- Для чего нужен частотный преобразователь оборотов
- Область применения
- Выбираем устройство
- Устройство ПЧ
- Виды устройств
- Прибор триак
Для чего нужен частотный преобразователь оборотов
 Функция регулятора в инвертировании напряжения 12, 24 вольт, обеспечение плавности пуска и остановки с использованием широтно-импульсной модуляции.
Функция регулятора в инвертировании напряжения 12, 24 вольт, обеспечение плавности пуска и остановки с использованием широтно-импульсной модуляции.
Контроллеры оборотов входят в структуру многих приборов, так как они обеспечивают точность электрического управления. Это позволяет регулировать обороты в нужную величину.
Область применения
Регулятор оборотов двигателя постоянного тока используется во многих промышленных и бытовых областях. Например:
- отопительный комплекс;
- приводы оборудования;
- сварочный аппарат;
- электрические печи;
- пылесосы;
- швейные машинки;
- стиральные машины.
Выбираем устройство
![]() Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
Устройство ПЧ
- двигатель переменного тока природный контроллер;
- привод;
- дополнительные элементы.
Схема контроллера оборотов вращения двигателя 12 в изображена на рисунке. Обороты регулируются с помощью потенциометра. Если на вход поступают импульсы с частотой 8 кГц, то напряжение питания будет 12 вольт.
Прибор может быть куплен в специализированных точках продажи, а можно сделать самому.
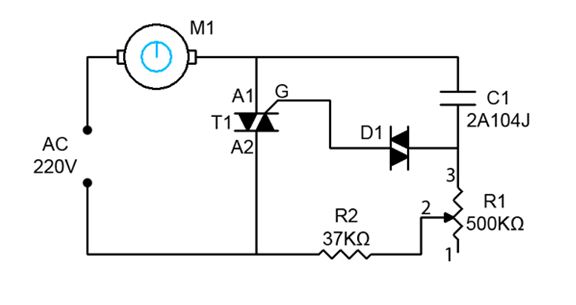
Схема регулятора оборотов вращения переменного тока
При пуске трехфазного двигателя на всю мощность, передаётся ток, действие повторяется около 7 раз. Сила тока сгибает обмотки двигателя, образуется тепло, на протяжении долгого времени. Преобразователь представляет собой инвертор, обеспечивающий превращение энергии. Напряжение поступает в регулятор, где происходит выпрямления 220 вольт с помощью диода, расположенного на входе. Затем происходит фильтрация тока посредством 2 конденсатора. Образуется ШИМ. Далее импульсный сигнал передаётся от обмоток двигателя к определённой синусоиде.
Существует универсальный прибор 12в для бесколлекторных двигателей.
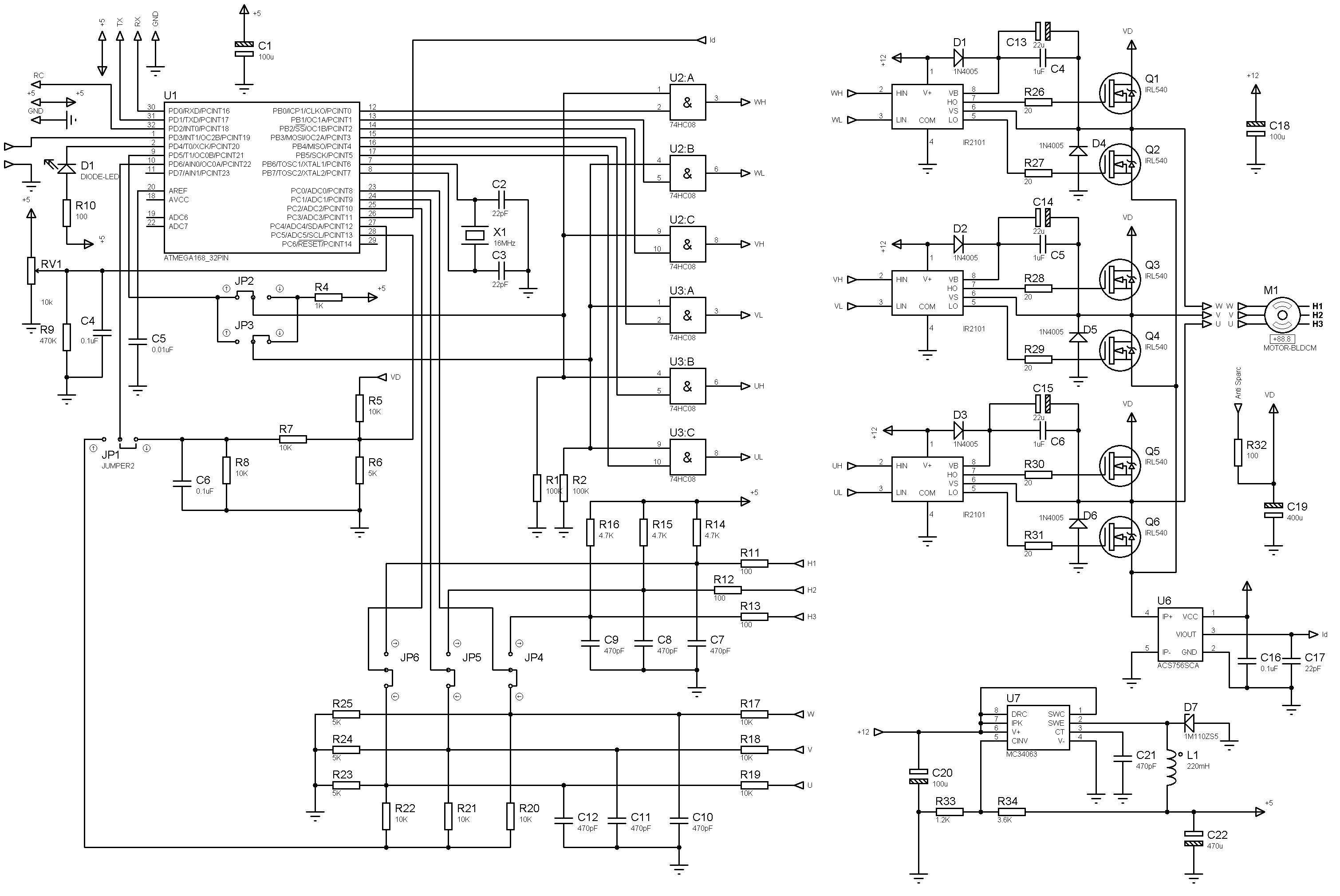
Схема состоит из двух частей–логической и силовой. Микроконтроллер расположен на микросхеме. Эта схема характерна для мощного двигателя. Уникальность регулятора заключается в применении с различными видами двигателей. Питание схем раздельное, драйверам ключей требуется питание 12В.
Виды устройств
Прибор триак
Устройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
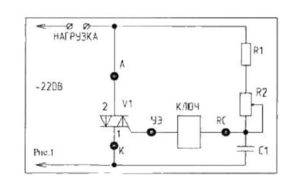 Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Преобразователи на электронных ключах
Распространённые регулятор тиристор, обладающие простой схемой работы.
Тиристор, работает в сети переменного тока.
Отдельным видом является стабилизатор напряжения переменного тока. Стабилизатор содержит трансформатор с многочисленными обмотками.
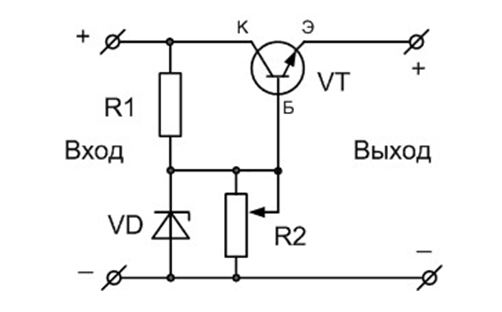
Схема стабилизатора постоянного тока
Зарядное устройство 24 вольт на тиристоре
К источнику напряжения 24 вольт. Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Процесс пропорциональных сигналов
Сигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.
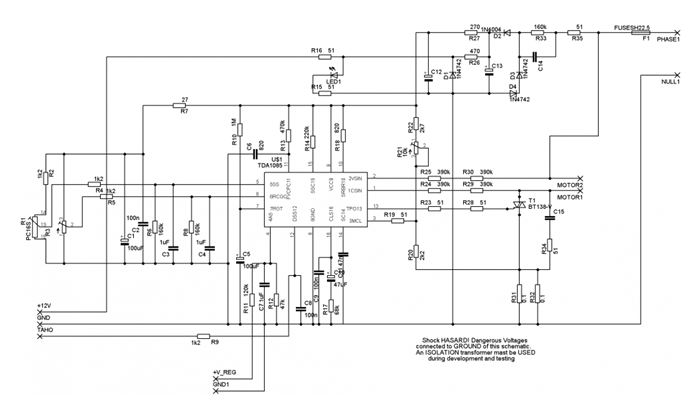
Микросхема TDA 1085
Микросхема TDA 1085, изображенная выше, обеспечивает управление электродвигателем 12в, 24в обратной связью без потерь мощности. Обязательным является содержание таходатчика, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.
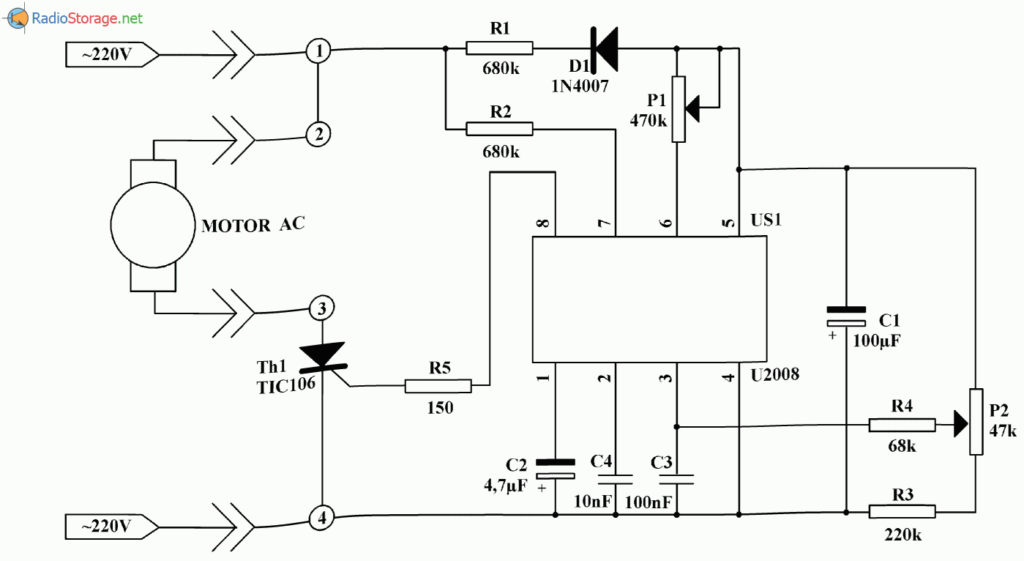
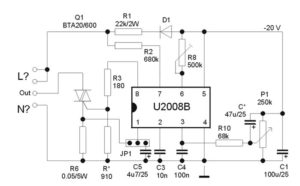 Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Важно! При регулировке контроллера мощности нужно помнить, что все детали устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
 Фото – мощный регулятор для асинхронного двигателя
Фото – мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
 Фото – регулятор оборотов двигателя постоянного тока
Фото – регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
![]() Фото – шим контроллер оборотов
Фото – шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
 Фото – схема регулятора для коллекторного двигателя
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Фото – синусоида нормальной работы электродвигателя
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
 Фото – схема регулятора для бесколлекторных двигателей
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
 Фото – схема регулятора оборотов своими руками
Фото – схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
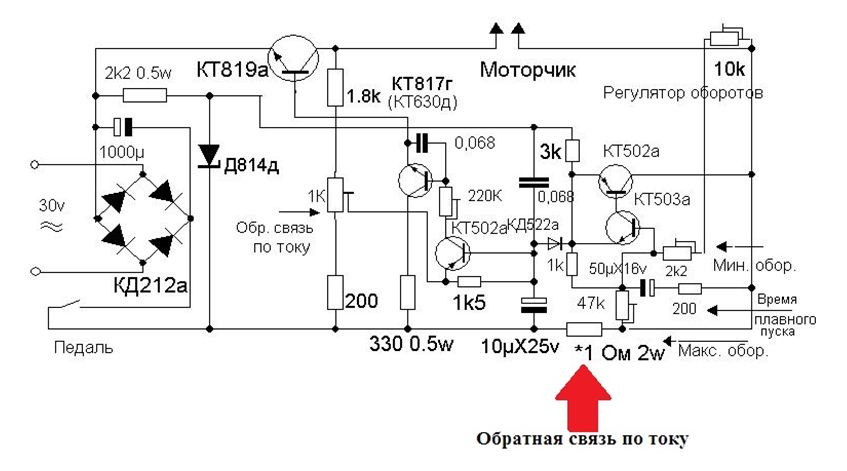
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:

Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.







