- Способы регулировки оборотов вращения асинхронных двигателей
- Что такое асинхронный двигатель?
- Двигатели с короткозамкнутым ротором (АДКР)
- Двигатели с фазным ротором
- Принцип работы и число оборотов асинхронных двигателей
- Способы изменения оборотов двигателя
- Типичные схемы регуляторов оборотов
- РЕГУЛЯТОР МОЩНОСТИ ДЛЯ 3 ФАЗНОГО МОТОРА
- Схема регулятора
- Органы управления
- Основные параметры
- Трехфазный симисторный (тиристорный) регулятор мощности на микроконтроллере
Способы регулировки оборотов вращения асинхронных двигателей
Достаточно часто режим работы вспомогательного механизированного оборудования требует понижения штатных частот вращения. Добиться такого эффекта позволяет регулировка оборотов асинхронного двигателя. Как это сделать своими руками (расчет и сборку), используя стандартные схемы управления или самодельные устройства, попробуем разобраться далее.
Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».

Двигатели с фазным ротором
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.

Принцип работы и число оборотов асинхронных двигателей
Данный вопрос рассмотрим на примере АДКР, как наиболее распространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, каждая из трех фаз которой смещена геометрически на 120°. После подачи напряжения возникает магнитное поле, создающее путем индукции ЭДС и ток в обмотках ротора. Последнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а именно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
n = 60f / p, об/мин
где f – частота сетевого напряжения, Гц, р – число полюсных пар статора.
Все технические характеристики указываются на металлической табличке, закрепленной на корпусе. Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:
- Расчет количества катушек. Полученное значение сопоставляется с действующими нормами для напряжения 220 и 380В (см. табл. ниже),
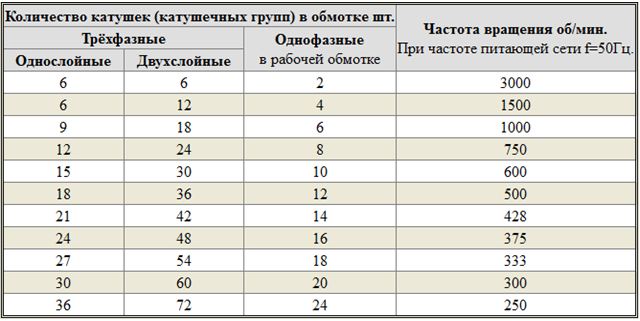
- Расчет оборотов с учетом диаметрального шага обмотки. Для определения используется формула вида:
где 2p – число полюсов, Z1 – количество пазов в сердечнике статора, y – собственно, шаг укладки обмотки.
Стандартные значения оборотов:

- Расчет числа полюсов по сердечнику статора. Используются математические формулы, где учитываются геометрические параметры изделия:
2p = 0,35Z1b / h или 2p = 0,5Di / h,
где 2p – число полюсов, Z1 – количество пазов в статоре, b – ширина зубца, см, h – высота спинки, см, Di – внутренний диаметр, образованный зубцами сердечника, см.
После этого по полученным данным и магнитной индукции нужно определить количество витков, которое сверяется с паспортными данными двигателей.
Способы изменения оборотов двигателя
Регулировка оборотов любого трехфазного электродвигателя, используемого в подъемно-транспортной технике и оборудовании, позволяет добиться требуемых режимов работы точно и плавно, что далеко не всегда возможно, например, за счет механических редукторов. На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
- Изменение скорости магнитного поля в статоре. Достигается за счет частотного регулирования, переключения числа полюсных пар или коррекции напряжения. Следует добавить, что эти методы применимы для электродвигателей с короткозамкнутым ротором,
- Изменение величины скольжения. Этот параметр можно откорректировать за счет питающего напряжения, подключения дополнительного сопротивления в электрическую цепь ротора, применения вентильного каскада или двойного питания. Используется для моделей с фазным ротором.
Наиболее востребованными методами являются регулирование напряжения и частоты (за счет применения преобразователей), а также изменение количества полюсных пар (реализуется путем организации дополнительной обмотки с возможностью переключения).
Типичные схемы регуляторов оборотов
На рынке сегодня есть широкий выбор регуляторов и частотных преобразователей для асинхронных двигателей. Тем не менее, для бытовых нужд подъемного или обрабатывающего оборудования вполне можно сделать расчет и сборку на микросхеме самодельного прибора на базе тиристоров или мощных транзисторов.
Ниже представлен пример схемы достаточно мощного регулятора для асинхронного двигателя. За счет чего можно добиться плавного контроля параметров его работы, снижения энергопотребления до 50%, расходов на техническое обслуживание.
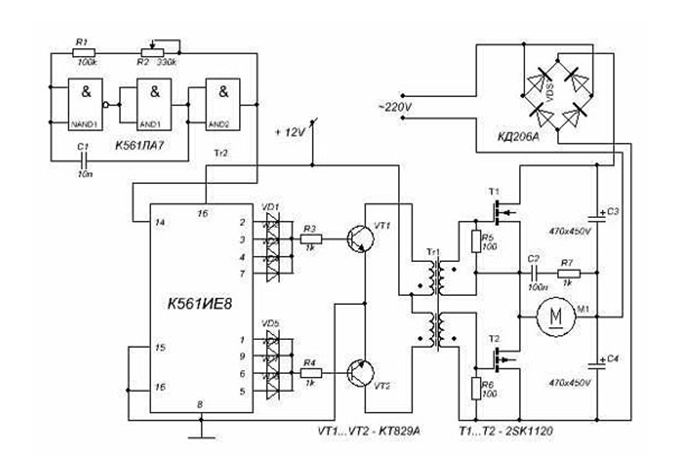
Данная схема является сложной. Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:
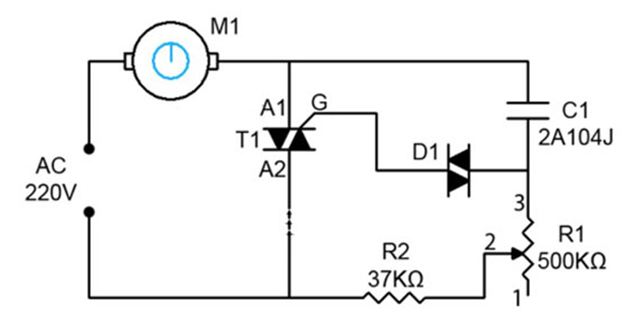
Обороты электродвигателя будут регулироваться за счет потенциометра, который определяет фазу входного импульса, открывающего симистор.
Как можно судить из информации, представленной выше, от оборотов асинхронного двигателя зависят не только параметры его работы, но и эффективность функционирования питаемого подъемного или обрабатывающего оборудования. В торговой сети сегодня можно приобрести самые разнообразные регуляторы, но также можно совершить расчет и собрать эффективное устройство своими руками.
РЕГУЛЯТОР МОЩНОСТИ ДЛЯ 3 ФАЗНОГО МОТОРА
Цифровой регулятор мощности для 3 фазного мотора переменного тока выполнен с использованием специальной микросхемы MC3PHAC от фирмы NXP Semiconductor. Она генерирует 6 ШИМ-сигналов для 3 фазного двигателя переменного тока. Блок легко совмещается с мощным 3 фазным IGBT/MOSFET ключевым приводом. Плата обеспечивает 6 ШИМ сигналов для IPM или IGBT инвертора, а также сигнал торможения. Схема работает в автономном режиме и не требует программирования и кодирования.
Схема регулятора

Органы управления
- PR1: Потенциометр для установки ускорения
- PR2: Потенциометр для регулировки скорости
- SW1: Переключатель DIPX4 для установки частот 60Hz/50Hz и установки выхода активный низкий / активный высокий
- SW2: Переключатель сброса
- SW3: Старт / стоп мотор
- SW4: изменить направление двигателя

Основные параметры
- Питание драйвера 7-15 В постоянного тока
- Потенциометр для управления скоростью двигателя
- Частота ШИМ по умолчанию 10.582 кГц (5.291 кГц – 164 кГц)
М/с MC3PHAC — это монолитный интеллектуальный контроллер, разработанный специально для удовлетворения потребности в недорогих 3-фазных системах управления электродвигателем переменного тока с регулировкой скорости вращения. Устройство адаптируется и настраивается в зависимости от его параметров. Оно содержит все активные функции, необходимые для реализации части управления с открытым контуром. Всё это делает MC3PHAC идеально подходящей для устройств, требующих поддержки управления двигателем переменного тока.

В состав MC3PHAC входят защитные функции, состоящие из контроля напряжения шины постоянного тока и входа неисправности системы, которые немедленно отключат модуль ШИМ при обнаружении неисправности системы.
Все выходные сигналы TTL уровня. Вход для блока питания 5-15 В постоянного тока, постоянное напряжение на шине должно быть в пределах 1.75 — 4,75 вольта, DIP-переключатель предусмотрен на плате для установки под двигатели с частотой 60 или 50 Гц, перемычки помогают установить полярность выходного ШИМ-сигнала, то есть активный низкий или активный высокий уровень, что позволяет использовать эту плату в любом модуле, так как выход можно установить активный низкий или высокий. Потенциометр PR2 помогает регулировать скорость двигателя. Для изменения базовой частоты, времени отключения ШИМ, других возможных параметров — изучайте даташит. Файлы платы — в архиве

Управление скоростью. Синхронная частота электродвигателя может быть задана в режиме реального времени для любого значения от 1 Гц до 128 Гц регулировкой потенциометра PR2. Коэффициент масштабирования составляет 25,6 Гц на вольт. Обработка 24-битным цифровым фильтром для того чтобы увеличить стабильность скорости.
Управление ускорением. Ускорение двигателя может быть задано в режиме реального времени в диапазоне от 0,5 Гц/сек до 128 Гц/сек, путем регулировки потенциометра PR1. Коэффициент масштабирования составляет 25,6 Гц/секунду на вольт.
Защита. При возникновении неисправности MC3PHAC немедленно отключает ШИМ и ожидает, пока условие неисправности не будет устранено перед запуском таймера для повторного включения. В автономном режиме этот интервал времени ожидания задается на этапе инициализации путем подачи напряжения на вывод MUX_IN, в то время как вывод RETRY_TxD управляется на низком уровне. Таким образом, время повтора может быть указано от 1 до 60 секунд с коэффициентом масштабирования 12 секунд на вольт.
Контроль внешних неисправностей. Вывод FAULTIN принимает цифровой сигнал, указывающий на неисправность, обнаруженную с помощью внешних цепей мониторинга. Высокий уровень на этом входе приводит к немедленному отключению ШИМ. Как только этот вход возвращается к низкому уровню логики, таймер повтора сбоя начинает работать, и ШИМ повторно включается после достижения запрограммированного значения тайм-аута. Входной контакт 9 разъема CN3 FLTIN должен быть с высоким потенциалом.
Мониторинг целостности напряжения (входной сигнал pin 10 в cn3) в DC_BUS отслеживается на частоте 5.3 кГц (4.0 кГц, если частота ШИМ имеет значение до 15,9 кГц). В автономном режиме пороги фиксируются на 4.47 вольт (128% от номинальной), и 1,75 вольт (50% от номинальной), где номинальное значение определяется в 3,5 вольт. Как только уровень сигнала DC_BUS возвращается к значению в пределах допустимого — таймер повтора сбоя начинает работать, и ШИМ снова включается после достижения запрограммированного значения тайм-аута.
Регенерация. Процесс экономии, с помощью которого сохраненная механическая энергия в двигателе и нагрузке переносятся обратно в привод электроники, происходит это как правило, в результате принудительного замедления. В особых случаях, когда этот процесс происходит часто (например, системы управления двигателями лифтов), он включает специальные функции, чтобы позволить этой энергии перейти обратно в сеть переменного тока. Однако для большинства недорогих приводов переменного тока эта энергия сохраняется в конденсаторе шины постоянного тока за счет увеличения ее напряжения. Если этот процесс не установлен, напряжение шины постоянного тока может подниматься до опасного уровня, что может привести к порче конденсатора шины или транзисторов в инверторе питания. MC3PHAC позволяет автоматизировать и стабилизировать этот процесс.
Резистивное торможение. DC_BUS пин-код отслеживается на 5.3 кГц (4.0 кГц, если частота ШИМ имеет значение до 15,9 кГц), и когда напряжение достигает определенного порога, RBRAKE контакт примет высокий потенциал. Этот сигнал может использоваться для управления резистивным тормозом, размещенным через конденсатор шины постоянного тока, таким образом, механическая энергия от двигателя будет рассеиваться в виде тепла в резисторе. В автономном режиме порог DC_BUS, необходимый для подтверждения сигнала RBRAKE, зафиксирован на уровне 3,85 вольта (110 % номинала), где номинал определяется как 3,5 вольта.

Выбор частоты ШИМ. У MC3PHAC имеется четырех дискретных частоты ШИМ, которые могут быть динамически изменены во время вращения электродвигателя. Этот резистор может быть потенциометром или фиксированным резистором в диапазоне, показанном в таблице. Частота ШИМ определяется подачей напряжения на контакт MUX_IN в то время как контакт ШИМ FREQ_RxD управляется низким потенциалом.
Трехфазный симисторный (тиристорный) регулятор мощности на микроконтроллере
Представляю Вашему вниманию трехфазный регулятор мощности на микроконтроллере.
Устройство регулирует мощность в активной нагрузке включенной треугольником, либо звездой , без использования нулевого проводника. Предназначено для использования с печами сопротивлений, водогрейными котлами, трехфазными ТЭНами и даже лампами накаливания, при соблюдении условия симметричной нагрузки в фазах. Два режима работы – регулирование с использованием алгоритма Брезенхема, и фазовый метод регулирования. Устройство задумывалось как максимально простое, и доступное в повторении. Управление от кнопок либо потенциометром, светодиодный индикатор режимов работы (не обязательно), светодиод , показывающий состояние устройства.
Внимание! Присутствуют опасное для жизни напряжение! Для опытных пользователей!
Схема устройства для удобства разделена на функциональные блоки. Это дает возможность вносить дальнейшие изменения и улучшения в конструкцию, без кардинальной переработки всей схемы. Ниже будет описан каждый блок в отдельности.
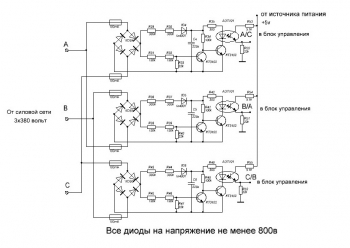
Силовая схема
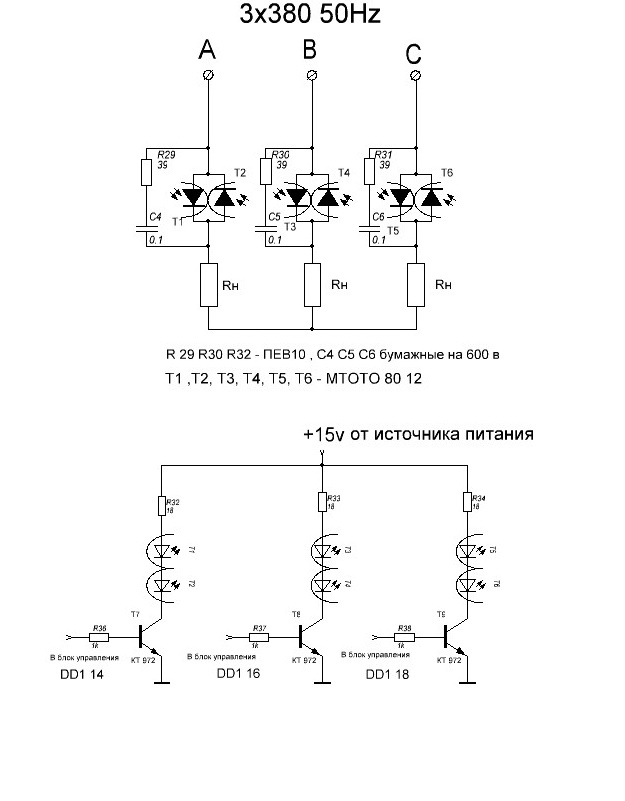
Авторский вариант был построен на мощных оптотиристорных модулях МТОТО 80 — 12. Каждый модуль содержит два встречно — параллельных восьмидесятиамперных оптотиристора. Используется три модуля, по одному в каждую фазу. Управляющие импульсы приходят одновременно на оба силовых ключа, но откроется только тот, к которому приложено напряжение в прямой полярности. Модули заменимы на тиристорные или симисторные сборки, либо отдельные тиристоры и симисторы. Модульные сборки удобнее в монтаже, имеют изолированную подложку, и упрощают гальваническую развязку схемы управления. При использовании отдельных тиристоров или симисторов, потребуется ставить дополнительные импульсные трансформаторы, либо оптроны. Так же потребуется подобрать токоограничивающие резисторы оптронов (R32 –R34)под имеющиеся у вас экземпляры. Микроконтроллер формирует управляющие импульсы, которые усиливаются составными транзисторами Т7-Т9. Импульсы модулированы высокой частотой , для уменьшения тока через оптроны , так же это дает возможность использования малогабаритных импульсных трансформаторов (далее ТИ). Питание оптронов либо ТИ осуществляется нестабилизированным напряжением 15в.
Обязательны к установке RC цепи параллельно тиристорам. В моем варианте это резисторы ПЭВ-10 39 Ом и конденсаторы МБМ 0,1мкф 600в. Модули установлены на радиатор, при работе греются. Нагрузка трехфазный нихромовый нагреватель, максимальный ток 60А. За два года эксплуатации отказов не было.
На схеме не показан, но должен быть установлен, автоматический выключатель под рассчитанную нагрузку, так же желательно установить отдельный автоматический выключатель на фазы блока синхронизации. Устройство подключается к сети 3х380 вольт с соблюдением чередования фаз А-В-С, при неправильном чередовании устройство работать не будет. Нулевой провод нужен для подключения трансформатора блока питания, если его первичная обмотка выполнена на 220 вольт. При использовании трансформатора на 380 вольт, нулевой проводник не нужен.
Защитное заземление корпуса устройства выполнять обязательно!
Схема источника питания
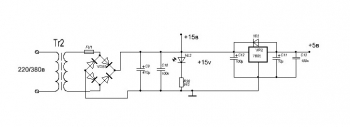
В пояснении не нуждается, используется два напряжения – нестабилизированное 15 вольт и стабилизированное 5 вольт, потребление в авторском варианте составляло до 300мА, в большей степени зависит от светодиодного индикатора и используемых силовых элементов. Можно использовать любые доступные детали, особых требований нет.
Схема блока синхронизации
Содержит три одинаковых канала. Каждый канал подключен между двух фаз, т.е. каналы включены треугольником. В момент равенства фазных напряжений (точка пересечения синусоид ) формируется импульс, используемый для синхронизации в МК. Детали не критичны, но нужно придерживаться номиналов, для более точной синхронизации.Если есть двухлучевой осциллограф, желательно ,подбором резисторов R33 ,R40 ,R47, подогнать момент формирования импульса к точке пересечения синусоид. Но это не обязательное условие. Используемые оптроны АОТ 101 можно заменить любыми аналогичными, и доступными, единственное требование к ним — высокое пробивное напряжение, так как именно оптроны гальваническую развязку блока управления от сети. Можно найти более простую схему детектора нуля, и собирать ее, но с учетом подключения на межфазное 380 В. Очень желательно использовать предохранители , как показано в схеме, так же желательно использовать отдельный автоматический выключатель на этот блок.
Блок управления и индикации
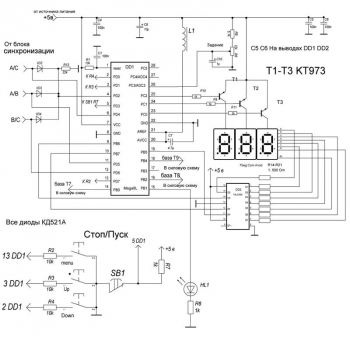
Это основной блок. Микроконтроллер ATmega8 выдает импульсы управления на тиристоры, и обеспечивает индикацию режимов работы. Работает от внутреннего генератора, тактовая 8 МГц. Фьюзы приведены ниже на картинке. Семисегментный светодиодный индикатор с общим анодом, на три знака. Управляется через три анодных ключа Т1-Т3 , сегменты переключаются сдвиговым регистром. Можно не устанавливать индикатор, регистр и связанные с ними элементы, если не требуется настройки работы. Можно установить любой доступный тип индикаторов, но потребуется подбор токоограничивающих резисторов в цепи сегментов. Светодиод HL1 показывает основные состояния устройства.
Пуск и остановка осуществляется переключателем SB1. Замкнутое состояние – Пуск, разомкнутое -Стоп. Регулировка мощности либо от кнопок Up ,Down, либо от задатчика R6, выбор осуществляется через меню. Дроссель L любой малогабаритный, нужен для лучшей фильтрации опорного напряжения АЦП микроконтроллера. Емкости С5 , С6 требуется установить, как можно ближе к выводам питания МК и регистра, в моем варианте они были напаяны на ножки поверх микросхем. В условиях больших токов и сильных помех они необходимы для надежной работы устройства.
Работа регулятора мощности
В зависимости от выбранной прошивки будет осуществляется регулирование либо фазоимпульсным методом, либо методом пропуска периодов так называемый алгоритм Брезенхема.
При фазоимпульсном регулировании напряжение на нагрузке плавно изменяется практически от нуля, до максимума, путем изменения угла открытия тиристоров. Импульс выдается два раза за период, одновременно на оба тиристора, но открыт будет только тот , к которому приложено напряжение в прямой полярности.
На малых напряжениях ( большой угол открытия) возможно перерегулирование , связанное с неточностью попадания импульса синхронизации в момент пересечения синусоид. Для исключения этого эффекта по умолчанию нижняя граница задана значением 10. Через меню , при необходимости можно изменить ее в диапазоне от 0 до 99. На практике этого ни разу не требовалось, но тут все зависит от конкретной задачи. Данный метод подходит для регулировки светового потока ламп накаливания, при условии их одинаковой мощности в каждой фазе.
Так же важно, чтобы чередование фаз сети было правильным А-В-С. Для проверки можно при включении устройства провести тест на правильное чередование фаз. Для этого необходимо при включении устройства , когда на индикаторе отображаются символы — 0 — держать нажатой кнопку menu , если фазировка правильная индикатор отобразит символы AbC ,если нет ACb, и требуется перебросить местами две любые фазы.
Если отпустить кнопку menu устройство перейдет в основной режим работы.
При использовании регулирования методом пропуска периодов, не требуется фазировка и тест в прошивку не введен. В этом случае тиристоры открываются одновременно , можно представить их как простой пускатель коммутирующий все три фазы сразу. Чем больше нужна мощность на нагрузке , тем большее количество раз в единицу времени , тиристоры будут в проводящем состоянии. Данный метод не подходит для ламп накаливания.
В настройке устройство не нуждается.
При включении происходит считывание настроек из энергонезависимой памяти МК, если в памяти нет значений, либо они некорректны, устанавливаются значения по умолчанию. Далее МК проверяет наличие импульсов синхронизации и состояние переключателя SB1. Если SB1 в разомкнутом состоянии импульсы управления не выдаются , на индикатор выводится сообщение OFF , светодиод HL1 мигает с высокой частотой. Если замкнуть SB1 на индикаторе высветится текущее задание мощности, будут формироваться импульсы управления , светодиод HL1 светится постоянно. Если при пуске либо во время работы пропадут управляющие импульсы более чем на 10 секунд, индикатор отобразит цифры 380 , светодиод будет моргать с низкой частотой, импульсы управления тиристорами снимутся. При появлении импульсов синхронизации , устройство вернется к работе. Так было сделано в связи с плохой сетью в месте эксплуатации устройства, частыми перебоями и перекосами фаз.
Меню содержит четыре подменю, переключаемых кнопкой menu , если кнопка не нажата некоторое время, отображается текущий установленный уровень мощности условно от 0 до 100. Уровень мощности изменяется кнопками Up или Down, либо , если разрешено(по умолчанию) ,потенциометром.
Длительное нажатие кнопки menu переключает подменю.
Подменю 1 на индикаторе отображается Грˉ это верхняя граница регулирования мощности, при нажатии кнопок Up или Down, будет показано текущее значение , его возможно изменять в большую или меньшую сторону, в пределах границ. По умолчанию значение 99.
Подменю 2 на индикаторе Гр_ это нижняя граница регулирования мощности, все аналогично , значение по умолчанию 10.
Подменю 3 показывает используется ли задание от потенциометра 1 – да 0- нет. На индикаторе 3-1 либо 3-0, выбор нажатием кнопок Up или Down. По умолчанию – используется(1).
Подменю 4 на индикаторе ЗАП , при нажатии любой из кнопок Up или Down, произойдет запись текущих значений в энергонезависимую память МК. При записи произойдет однократное мигание надписи ЗАП. Будут записаны границы регулирования, разрешен ли потенциометр и текущее значение мощности, если оно устанавливается кнопками, а потенциометр не используется.
Следующее нажатие menu , переключит в основное меню, будет отображено значение мощности. Так же длительное не нажатие кнопок переключит меню на основное.
Можно не использовать семисегментный светодиодный индикатор ,если не требуется ничего изменять, в этом случае все будет работать, регулироваться от 10 до 99 при помощи потенциометра. Состояние устройства покажет светодиод HL1 . Собственно индикатор был нужен на этапе отладки и для последующей модернизации. В планах построить на этой базе регулятор для индуктивной нагрузки , и сделать устройство плавного пуска асинхронного двигателя.
Печатная плата разрабатывалась для блока синхронизации и для блока управления, но в итоге из за переработок блок управления был сделан навесным способом, на макетной плате, Печатная плата»как есть» в архиве, разводка семисегментного индикатора выполнена под имеющийся у меня индикатор, при необходимости можно программно сменить соответствующие сегментам вывода. Часть деталей ( RC цепи , резисторы и диоды силовой схемы, элементы блока питания, кнопки, потенциометр и светодиоды) монтировались так же навесным способом.
В архиве представлена плата блока управления и блока синхронизации, в формате sprint layout, и схемы в формате Splan 7, там же два варианта прошивки под фазоимпульсное управление и управление пропуском периодов. МК шился программатором «пять проводков» под управлением программы Uniprof , скачать ее можно на сайте автора http://avr.nikolaew.org/
фьюзы представлены ниже.
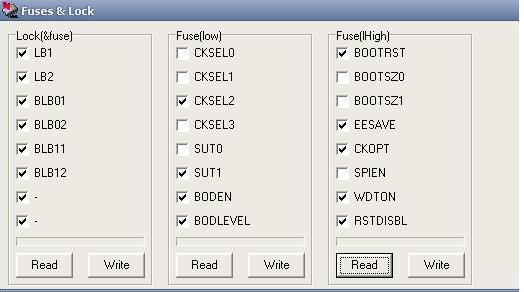
Фьюзы даны для установки в этой программе , при использовании другой — Помните, что включенный FUSE — это FUSE без галочки!
Печатные платы не оптимальны , и скорее всего , при повторении придется доработать их под имеющиеся в наличии детали, и конкретную конфигурацию и расположение элементов ( кнопок , потенциометра, индикатора, диодов и оптронов). Так же обратите внимание на контактные площадки, если сверлить отверстия диаметром 0,5-0,7 мм затруднительно, то перед печатью нужно увеличить размер контактных площадок. Главное требование для блока синхронизации — учитывайте , что напряжение высокое и может быть пробой по поверхности текстолита, и по поверхности деталей,поэтому желательно использовать выводные детали с большим расстоянием между выводами. По этой же причине мосты набраны из отдельных диодов. Не нужно экономить место и текстолит ! напряжение в отдельных точках платы синхронизации может достигать 600 вольт ! Плату после изготовления нужно покрывать электроизоляционным лаком, желательно в два — три слоя, чтобы исключить пробой по пыли.
Видео представлено при работе в режиме фазоимпульсного регулирования, на осциллографе сигнал с трансформаторов тока ,включенных в две фазы, нагрузка три лампы накаливания по 1 КВт. На видео макет устройства используемый для отладки.
Литература
- В.М. Яров . «Источники питания электрических печей сопротивления» учебное пособие 1982г.
- А.В.Евстифеев «Микроконтроллеры AVR семейства Mega, руководство пользовтеля » 2007г.







