- §81. Регулирование частоты вращения асинхронных двигателей
- Частотный регулятор скорости для асинхронного двигателя
- Устройство и принцип работы частотного регулятора
- Структура частотного регулятора
- Состав частотных преобразователей
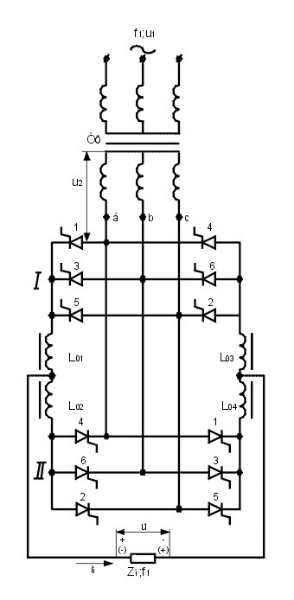
- Однофазные преобразователи частоты
- Регулирование частоты вращения асинхронного электродвигателя
- Подписка на рассылку
§81. Регулирование частоты вращения асинхронных двигателей
Частота вращения асинхронного двигателя
Из этого выражения видно, что ее можно регулировать, изменяя частоту f1 питающего напряжения, число пар полюсов р и
 Рис. 266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
Рис. 266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
скольжение s. Последнее при заданных значениях момента на валу Мвн и частоты f1 можно изменять путем включения в цепь обмотки ротора реостата.
Регулирование путем изменения частоты питающего напряжения. Этот способ требует наличия преобразователя частоты, к которому должен быть подключен асинхронный двигатель. На основе управляемых полупроводниковых вентилей (тиристоров) созданы статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.
 Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)
Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)
 Рис. 268. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора
Рис. 268. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора
 Рис. 269. Схемы подключения асинхронного двигателя к сети при изменении направления его вращения
Рис. 269. Схемы подключения асинхронного двигателя к сети при изменении направления его вращения
В двигателе же с фазным ротором в этом случае надо было бы изменять число полюсов обмотки ротора, что сильно усложнило бы его конструкцию, поэтому такой способ регулирования частоты вращения используется только в двигателях с коротко-замкнутым ротором. Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего применения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Регулирование путем включения в цепь ротора реостата. При включении в цепь обмотки ротора реостата с различным сопротивлением (Rп4, RпЗ, Rп2 и т. д.) получаем ряд реостатных механических характеристик 4, 3 и 2 двигателя. При этом некоторому нагрузочному моменту Мном (рис. 268) будут соответствовать меньшие частоты вращения n4, n3, n2 и т. д., чем частота nе при работе двигателя на естественной характеристике 1 (при Rп = 0). Это способ регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются большие потери энергии в регулировочном реостате, поэтому его используют только при кратковременных режимах работы двигателя (при пуске и пр.).
Изменение направления вращения. Для изменения направления вращения двигателя нужно изменить направление вращения магнитного поля, создаваемого обмотками статора. Это достигается изменением порядка чередования тока в фазах обмотки статора. Например, если максимумы токов поступают в фазы обмотки статора 1 (рис. 269, а) в следующем порядке: фаза А — фаза В — фаза С, то ротор 2 двигателя будет вращаться по часовой стрелке. Если же подавать их в такой последовательности: фаза В — фаза А — фаза С, то ротор начнет вращаться против часовой стрелки. Для этой цели необходимо изменить схему соединения обмоток статора с сетью, переключив две любые фазы (провода). Например, зажим А обмотки статора, который ранее был соединен с линейным проводом Л1, нужно переключить на провод Л2, а зажим В этой обмотки, соединенный ранее с Л2, переключить на провод Л1 (рис. 269,б). Такое переключение можно осуществить обычным переключателем.
Частотный регулятор скорости для асинхронного двигателя
Регулировка скорости изменением величины напряжения снижает момент и также увеличивает потери мощности. Регулировка частоты вращения путем изменения числа полюсов осуществляется ступенчато, кроме того, этот способ пригоден только для специальных многоскоростных двигателей с несколькими обмотками неподвижной части.
Асинхронный двигатель – самый распространенный электропривод технологического оборудования. Главная особенность таких электрических машин – постоянная скорость вращения вала. Ее регулировку осуществляют:
- Механическим способом. Для этого вал подключают к редукторам, муфтам и другим устройствам.
- Путем изменения числа пар полюсов, величины или частоты питающего напряжения обмоток статора.
Механическое регулирование усложняет кинематическую схему электропривода, ведет к потерям мощности и нерациональному расходу электроэнергии.
Наиболее перспективный метод регулирования уголовной скорости ротора – преобразование частоты питающего напряжения. Этот способ обеспечивает сохранение механических характеристик во всем диапазоне и обладает рядом других преимуществ.
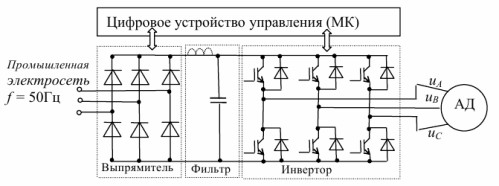
Устройство и принцип работы частотного регулятора
Принцип частотного регулирования основан на зависимости угловой скорости вращения ротора от частоты напряжения на обмотках статора. С появлением IGBT-транзисторов и GTO-тиристоров наибольшее распространение получила схема преобразования частоты на базе широтно-импульсного модулятора.
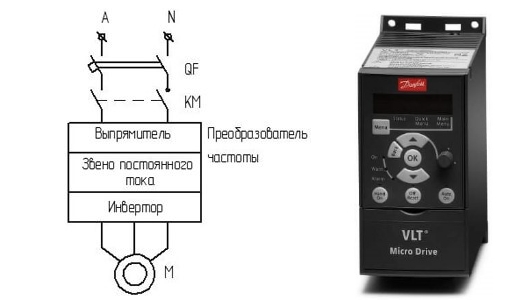
Такие преобразователи частоты состоят:
- Из силового выпрямителя с С или LC фильтром для сглаживания пульсаций.
- Из инвертора на IGBT-транзисторах для преобразования постоянного напряжения в переменное, заданной частоты и амплитуды.
- Из блока управления для генерации отпирающих силовые транзисторы импульсов.
Переменное напряжение выпрямляется и преобразуется в постоянное, затем снова инвертируется в переменное. Частота на силовом выходе ПЧ определяется длительностью отпирающих силовые транзисторы импульсов, поступающих со схемы управления.
Такой способ регулирования позволяет изменять частоту и амплитуду напряжения в силовой цепи электродвигателя, а значит управлять скоростью вращения ротора и моментом на валу электрической машины.
Структура частотного регулятора
Большинство частотных преобразователей для электродвигателей до 690 В выполнены по схеме двухуровневых инверторов напряжения. Они позволяют моделировать напряжение питания необходимой формы, амплитуды частоты. Такие устройства состоят из неуправляемого выпрямителя, 2-х транзисторных ключей на каждую фазу и конденсатора. Выходное напряжение содержит высшие гармоники, которые сглаживаются индуктивной нагрузкой. Специальные фильтры применяют относительно редко.
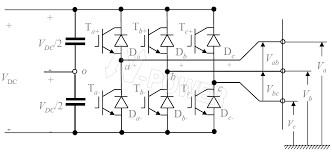
К недостаткам такой схемы является ограничение величины выходного напряжения, которое определяется максимальным напряжением полупроводниковых устройств.
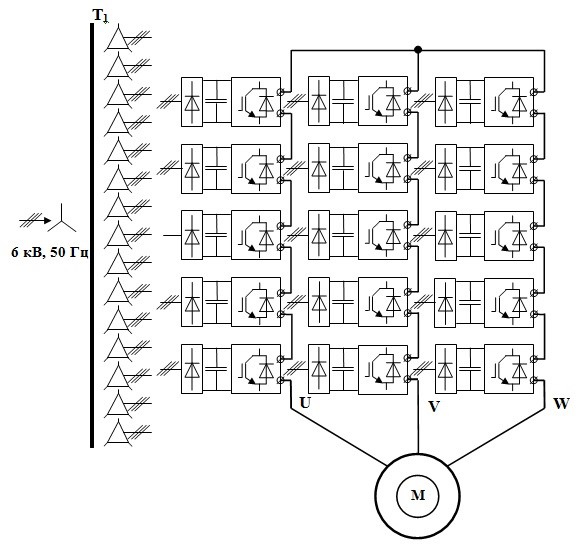
Для высоковольтных приводов используются многоуровневые схемы регулирования. Они состоят из нескольких однофазных инверторов, соединенных последовательно. Такая схема позволяет избежать резонансов, обеспечивает высокое быстродействие, снижает скорость нарастания напряжения. Такие ПЧ имеют модульную конструкцию. При выходе из строя одной из ячеек, ее легко заменить. К недостаткам этой схемы относятся необходимость отдельного источника питания для каждого модуля, функции которого выполняет трансформатор специального назначения.
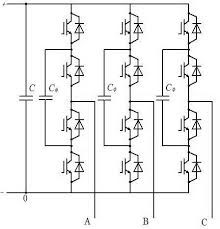
Преобразователи частоты с плавающими конденсаторами позволяют обойтись без входного трансформатора и увеличивать число ячеек в зависимости от требуемой мощности. Такое решение обеспечивает снижение высших гармоник, уменьшает скорость нарастания напряжения.
Для регулировки скорости электродвигателей с повторно-кратковременным режимом работы частыми реверсами применяют инверторы тока. Эти устройства представляют собой управляемый выпрямитель и инвертор на тиристорах. Для уменьшения помех в цепи нагрузки в схему включается расщепленный индуктивный фильтр. Выходное напряжение таких устройств имеет форму аппроксимированной синусоиды. Для сглаживания его формы обязательно включение перед электродвигателем конденсаторов. Главное достоинство таких ПЧ – возможность рекуперации электроэнергии обратно в электросеть.
Прямые преобразователи частоты не содержат конденсаторов. Главное их преимущество – небольшие габариты и значительная мощность нагрузки. Такие устройства используются в составе мощных электроприводов работающих на низких скоростях. ПЧ этого типа выполнены на базе тиристорных преобразователей. На входе прямых ПЧ установлен фазосдвигающий трансформатор, устраняющий низшие гармоники и выполняющий функцию источника питания для каждого преобразователя. Прямые ПЧ требуют сложной схемы управления.
Состав частотных преобразователей
Кроме выпрямителя, ШИМ-модулятора и инвертора, в состав частотного преобразователя входят:
Устройство для ввода данных и обмена информаций с ПК, другими частотными преобразователями.
- Встроенная энергонезависимая память. В этом устройстве фиксируются аварийные отключения, изменения настроек, а также другие данные.
- Управляющий контроллер, обеспечивающий реализацию алгоритмов управления, обработку данных с датчиков, защитное отключение при ненормальных режимах работы.
- ЭМ-фильтр. Это устройство обеспечивает снижение реактивной высокочастотной составляющей, снижающей качество электроэнергии и отрицательно влияющей на работу электродвигателя.
- Вентилятор и радиатор для принудительного охлаждения и отвода тепла силовых транзисторов.
- Тормозной прерыватель и другие элементы.
Кроме аппаратной части, преобразователи частоты содержат программное обеспечение. Контроллеры с открытой логикой позволяют вносить изменения в стандартное ПО, поставляемое производителем, и самостоятельно программировать ПЧ.
Однофазные преобразователи частоты
Однофазные асинхронные электродвигатели широко применяются в качестве приводов насосных агрегатов, вентиляторов, маломощных станков. Для регулирования частоты вращения этих электрических машин применяются 2 основных способа:
- Изменение величины напряжения питания.
- Изменение частоты питающего напряжения.
Для регулирования питающего напряжения применяются трансформаторные, автотрансформаторные, тиристорные, симисторные и транзисторные преобразователи. Изменение частоты вращения путем регулирования напряжения имеет ряд серьезных недостатков:
- Увеличение скольжения и сильный нагрев обмоток статора.
- Узкий диапазон регулирования.
Кроме того, постоянная составляющая питающего напряжения на выходе тиристорных и симисторных устройств вызовает увеличение шума при работе, рывки и другие нежелательные явления.
Частотное регулирование лишено этих недостатков. Однофазные ПЧ применяются в холодильном оборудовании, системах вентиляции, бытовых насосах.
Такие электроприводы обеспечивают:
- Стабильную работу однофазного двигателя при любой частоте вращения.
- Снижение потребления электроэнергии.
- Возможность автоматической регулировки частоты вращения с обратной связью по изменению одного или нескольких технологических параметров.
- Удаленное управление и контроль характеристик.
- Защиту от ненормальных режимов работы и коротких замыканий.
- Интеллектуальное управление электродвигателем в соответствии с заданным алгоритмом.
- Возможность пуска без фазосдвигающего элемента.
- Поддержание необходимого момента на валу во всем диапазоне изменения скорости.
Кроме базовых составляющих, в состав однофазного преобразователя частоты входят ПИД-регулятор, ПЛК-контроллер, устройство для обмена данными с удаленным оборудованием, пульт дистанционного управления. При введении дополнительных настроек допустимо применение трехфазного ПЧ для однофазных двигателей переменного тока.

Таким образом, управление однофазными и трехфазными асинхронными электродвигателями путем изменения частоты значительно превосходит метод регулирования величины напряжения, механические способы.
Регулирование частоты вращения асинхронного электродвигателя
Подписка на рассылку
 Рисунок 1. Асинхронный двигатель Асинхронный двигатель (рис. 1) имеет неподвижную часть, которая называется статор, и вращающуюся часть, именуемую ротором. Магнитное поле создается в обмотке, размещенной в статоре. Такая конструкция электродвигателя позволяет регулировать частоту его вращения различными способами.
Рисунок 1. Асинхронный двигатель Асинхронный двигатель (рис. 1) имеет неподвижную часть, которая называется статор, и вращающуюся часть, именуемую ротором. Магнитное поле создается в обмотке, размещенной в статоре. Такая конструкция электродвигателя позволяет регулировать частоту его вращения различными способами.
Основные технические характеристики, учитываемые при изменении частоты вращения
При регулировании частоты вращения асинхронных электродвигателей следует учитывать несколько основных технических показателей, которые в значительной мере влияют на процесс работы двигателей.
- Диапазон регулирования Д, то есть предел, до которого возможно изменять частоту вращения. Эта характеристика вычисляется по соотношению минимальной и максимальной частоты вращения.
- Плавность регулирования — определяется по минимальному скачку частоты вращения электродвигателя, когда осуществляется переход одной механической характеристики на другую.
- Направление изменения частоты вращения двигателя (так называемая зона регулирования). Номинальные условия работы определяют естественную механическую характеристику двигателя. Когда осуществляется процесс регулирования частоты вращения, эти характеристики (напряжение и частота питающей сети) начнут изменяться. В результате получаются искусственные характеристики, которые обычно ниже естественных.
Есть несколько способов регулирования частоты вращения электродвигателя:
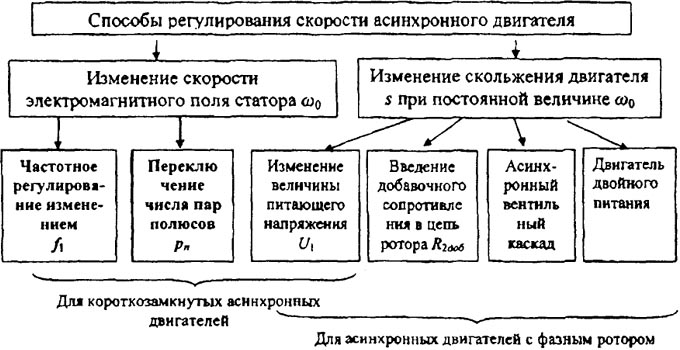
Регулирование частоты вращения изменением частоты питающей сети
Регулирование частоты вращения путем изменения частоты в питающей сети считается одним из самых экономичных способов регулирования, который позволяет добиться отличных механических характеристик электропривода. Когда происходит изменение частоты питающей сети, частота вращения магнитного поля также меняется.
Преобразование стандартной частоты сети, которая составляет 50 Гц, происходит за счет источника питания. Одновременно с изменением частоты происходит и изменение напряжения, которое необходимо для обеспечения высокой жесткости механических характеристик.
Регулирование частоты вращения позволяет добиться различных режимов работы электродвигателя:
- с постоянным вращающим моментом;
- с моментом, который пропорционален квадрату частоты;
- с постоянной мощностью на валу.
В качестве источника питания для регулирования могут использоваться электромашинные вращающиеся преобразователи, а также статические преобразователи частоты, которые работают на полупроводниковых приборах, серийно выпускающихся промышленностью.
Несомненным преимуществом частотного регулирования является наличие возможности плавно регулировать частоту вращения в обе стороны от естественной характеристики. При регулировании достигается высокая жесткость характеристик и отличная перегрузочная способность.
Регулирование частоты вращения изменением числа полюсов
Регулирование частоты вращения путем изменения числа полюсов происходит за счет изменения частоты вращения магнитного поля статора. Частота питающей сети остается неизменной, в то время как происходит изменение частоты вращения магнитного поля и частоты вращения ротора. Они меняются обратно пропорционально числу полюсов. Например, число полюсов равно 2, 4, 6, 8, тогда обороты двигателя при изменении их количества будут составлять 3000, 1500, 1000, 750 оборотов в минуту.
Двигатели, которые обеспечивают переключение числа пар полюсов, имеют обычно короткозамкнутый ротор с обмоткой. Благодаря этому ротору обеспечивается возможность работы двигателя без дополнительных пересоединений в цепи.
Изменение частоты вращения включением в цепь ротора с реостатом
Еще одним способом изменения частоты вращения двигателя является включение в цепь ротора с реостатом. Такой метод имеет существенное ограничение, так как может быть применен только для двигателей с фазным ротором. Он обеспечивает плавное изменение частоты вращения в очень широких пределах. Минусом же являются большие потери энергии в регулировочном реостате.
Изменение направления вращения
Изменение направления вращения двигателя может быть осуществлено за счет изменения направления вращения магнитного поля, которое создается обмотками статора. Изменение направления вращения можно достичь, изменив порядок чередования тока в фазах обмотки статора.







