Схема и ремонт радиоуправляемой игрушечной машинки Diskie Toys модели Mc QUEEN
Игрушечные машинки Diskie Toys серии Cars 2 копируют персонажей мультфильма Cars 2 (Тачки 2) и популярны у детей. Автор ремонтировал машинку модели «Молния Мак Куин» (Mc Queen) китайского производства, неизвестного года выпуска. На 3-й день машинка упала в воду, из неё пошёл дым, потом она стала останавливаться, не реагируя на команды с пульта. На интернет-сайте поддержки [1] предложений по ремонту нет. В московских интернет магазинах гарантийный срок обмена неисправных радиоуправляемых игрушек, на момент написания статьи был 7 дней. Согласно инструкции по эксплуатации на RC (Radio-Car) Mc QUEEN установлен сертифицированный модуль радиоуправления «27138» на частоту 27 МГц. Сведений по ремонту этого модуля автор не нашел. В настоящей статье приведены электрические схемы пульта управления (рис.1), машинки модели Mc QUEEN (рис.2), описаны найденные неисправности и способы их устранения (рис.3), отмечены некоторые особенности управления машинкой.
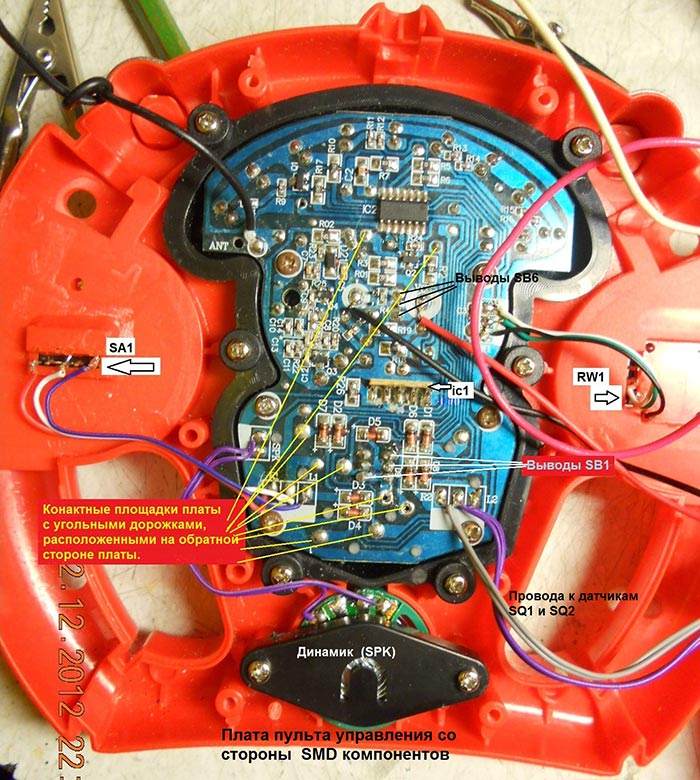
На схемах буквенно-цифровые обозначения радиодеталей соответствуют обозначениям, указанным на монтажных платах. Не обозначенные на платах детали автор обозначил самостоятельно. Обозначенные на платах, но не распаянные детали, рассеиваемая мощность SMD резисторов, перемычки, в т.ч. SMD, на схемах не указаны. Маркировка полупроводниковых SMD приборов указана в рамке, если была нанесена разборчиво. Все приведенные на схемах номиналы были прочитаны или измерены. В пульте управления, контакты кнопок SB2, SB3, SB4, SB5—угольные, они соединены с соответствующими контактными площадками платы угольными дорожками, такие же угольные дорожки соединяют с платой средний вывод SA1 и вывод 10 ic2. Эти дорожки на плате не обозначены. Они отмечены на схеме пульта управления утолщенными линиями и символом резистора, с указанием сопротивления данной угольной дорожки, или замкнутого контакта SB2—SB5 между двумя соответствующими контактными площадками. Шифратор команд управления пульта, микросхема ic2 с маркировкой «515Т», и дешифратор команд управления машинки, микросхема U2 с маркировкой «515R», в корпусах SOP 14, китайского производства. Программируются ли они, неизвестно, но объём памяти на одну-две команды имеют, описание этих микросхем автор не нашёл.

Пульт управления потребляет ток 50—150 мА. Его работоспособность сохраняется при питании от 3-х батареек LR6 до напряжения 3,3В. Светодиоды D19-D20—индикаторы включения пульта. С вывода 8 ice2 включается радиопередатчик пульта управления, и передаются коды, модулирующие излучаемый сигнал [2]. C вывода 9 ic2 сигналы управления поступают на вывод 3 ic1 звукового процессора, «черную таблетку», находящегося на отдельной плате, 8 на 15 мм.

В памяти ic1 2-х секундными файлами записаны звуковые эффекты. При поступлении сигнала управления ic1 выбирает нужный файл и транслирует его непрерывно до окончания управляющего сигнала. Динамик SPK находится внутри пульта управления. Первые два дня пульт мог произносить фразу: «Поговори со мной».
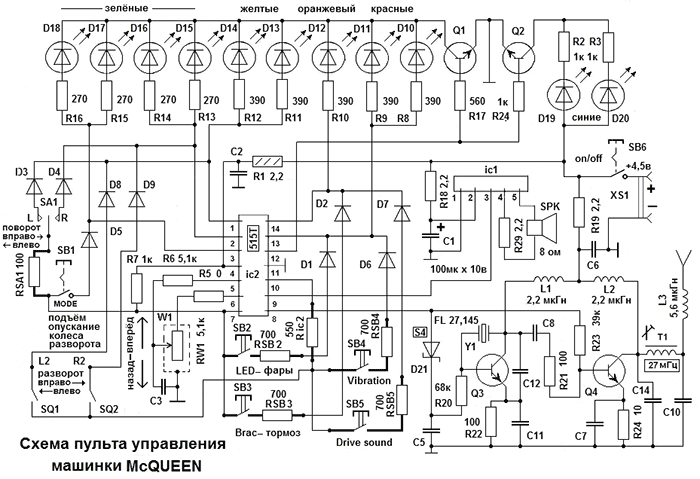
Схема 1
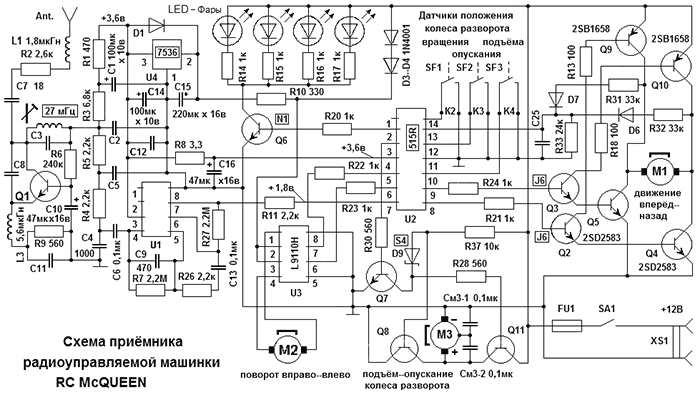
Схема 2
Движение вперёд—назад выполняется электродвигателем машинки М1, его работа управляется с пульта переменным сопротивлением RW1, включенным как реостат. Светодиоды шкалы пропорционального управления включаются последовательно, начиная с D18-D17 по D11-D10, они индицируют отклонение движка RW1 от среднего положения при движении вперёд—назад. Регулировка скорости движения осуществляется изменением частоты подачи команд вперёд—назад с пульта управления. Но эта регулировка не очень эффективна, т.к. на малых оборотах электродвигателю не хватает крутящего момента и машинка начинает дёргаться на старте. Поворот вправо—влево выполняется электродвигателем машинки М2, и управляется с пульта переключателем SA1. Для выполнения команды «Разворот» (Круговое вращение), нажатием переключателя SB1 «MODE» с пульта включается электродвигатель машинки М3 и подпружиненная платформа с закрепленным на ней колесом разворота опускается из верхнего положения. В нижнем положении платформы колесо разворота выдвигается и упирается в поверхность пола, шестерня на его оси входит в зацепление с шестерней редуктора двигателя ведущих колес М1, одновременно задние, ведущие колеса отрываются от поверхности, размыкается контакт SF3 и замыкается SF2, после чего двигатель М3 останавливается. Теперь команды поступающие с RW1 и SA1 блокируются, а двигатель М1 будет управляться датчиками положения SQ1 и SQ2 и вращать колесо разворота. Контакты SQ1 и SQ2 должны срабатывать при покачивании пультом из стороны в сторону, при замыкании одного из них машинка разворачивается вправо или влево в течение 3-х сек, затем самостоятельно останавливается. Датчики SQ1 и SQ2 металлические, цилиндрической формы, с осевым расположением выводов, без маркировки. Внутри, судя по звуку, находится шарик. При повороте датчика выводом золотистого цвета вниз контакт внутри датчика замыкается, а при повороте его вниз выводом серебристого цвета — размыкается. Датчики расположены на задней стенке пульта управления под углом в 90 град. один к другому, но угол их срабатывания более 150 град. Возможно, по этому, один из них был установлен в пульте вверх ногами, и чтобы изменить направление вращения машинки приходилось поворачивать пульт то вверх антенной, то вниз. Для отмены команды на круговое вращение выключают SB1, после чего повторно включается двигатель М3: платформа колеса разворота поднимается, шестерня на его оси отсоединяется от редуктора М1, размыкается SF2, ведущие колеса опускаются на поверхность, в верхнем положении платформы замыкается SF3 и М3 останавливается.
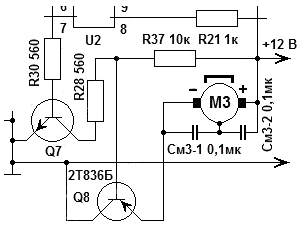
Схема 3
Машинка во время езды потребляет ток более 1А. При питании от 8-ми батареек LR6 она сохраняет работоспособность до напряжения 10,5В (1,3В на элемент). Полуразряженные элементы данного типоразмера не «держат» большой для них ток, поэтому применение аккумуляторов нежелательно. Самовосстанавливающийся предохранитель FU1 маркировки не имеет, и ни разу не сработал. Микросхема U1 без маркировки, вероятно, это сдвоенный операционный усилитель, аналогичный входящему в состав китайской микросхемы PTBA978B [3], «обвеска» их выводов совпадает, номиналы С4, С6, С9, С13 взяты из [3]. Вне платы приемника машинки расположены электродвигатели М1, М2, М3, датчики SF1—SF3, разъём и выключатель питания, светодиоды фар, плата с сопротивлениями R14—R17. Двигатели М1 и М3 с редукторами, платформа с колесом разворота, ведущие колеса собраны в единый блок заднего моста. Датчик SF1 находится в неразборном узле крепления оси колеса разворота, доступа к нему нет, его контакты замыкаются и размыкаются при каждом обороте колеса разворота. Датчики SF2 и SF3 —микротумблеры нажимного действия, SF2 крепится в самом низу блока, он наиболее подвержен загрязнению. Датчик SF3 находится в верхней части сборки. Все три датчика соединены проводами с соответствующими контактными площадками на плате: К2, К3, К4, при срабатывании они замыкают на общий провод соответствующие выводы микросхемы U2. При нарушении контактов датчиков SF2 и SF3, или обрыве их соединительных проводов, после подачи или отмены команды «MODE» двигатель М3 продолжает работать, непрерывно опуская и поднимая колесо разворота. Дешифратор U2, заметив ошибку в выполнении команды, самоблокируется и прекращает выполнение всех команд. Для перезапуска U2 машинку нужно выключить и повторно включить переключателем SA1.

Сломанная машинка отключалась после нажатия на пульте кнопки SB1 из-за невозможности выполнить команду «MODE». На её плате до обугливания выгорели транзисторы Q8 и Q11, управляющие двигателем М3, так, что невозможно было установить их тип и проводимость. Комплиментарная пара транзисторов подключенная эмиттерами к «+» М3, включала бы его при закрытом транзисторе Q7. Но М3 должен включаться по команде «MODE» при открывании Q7, тогда p-n-p транзистор Q11 и n-p-n Q8 надо подключать коллекторами к выводу «+» М3. После установки на место Q8 и Q11 пары транзисторов «8050» и «8550» коллекторами к «+» М3, тот заработал, но в течение суток эти транзисторы сгорели повторно. Пришлось рисовать схемы и разбираться в причине происшедшего: оказалось, что при переключении Q7, через транзисторы Q8 и Q11 некоторое время течет сквозной ток, а такое, как на плате, подключение их базовых выводов к D9 этот ток только увеличивает. При выполнении команды «MODE» М3 включается всего на 2—3 секунды, поэтому проработать несколько дней эта схема могла. Но при частом включении команды «MODE», или повышении сопротивления контактов SF2-SF3, транзисторы Q8 и Q11 сгорали бы обязательно. Чтобы избежать сквозного тока, из цепи управления М3 был удален n-p-n транзистор Q8, убрать бы его сразу и ничего бы не сгорело. На место Q11 был припаян 2Т836Б, всё заработало, но из-за отслаивания фольги контактных площадок Q11, (ранее он выгорал сильнее Q8), пришлось изменить схему включения М3. Результат ремонта показан на рис. 3. С платы удалены: диод D9, отслоившаяся фольга контактных площадок Q11. На место D9 установлен R28, транзистор 2Т836Б припаян в отверстия Q8, место Q11 оставлено свободным. Вывод «+» М3 подключен к плюсу питания платы, а «—» М3 к эмиттеру 2Т836Б.

Возможно, что плата приёмника предназначалась для другого изделия, а впоследствии была приспособлена к данной модели машинки. Возможно, что дефектная плата досталась только части машинок данной серии.
Из-за увеличения сопротивления контактов микротумблеров SF2 и SF3 они были промыты, для чего пришлось разбирать задний мост машинки. В пульте управления датчики SQ1 и SQ2 были заменены на кнопочные выключатели, установленные на заднюю стенку пульта. Управление машинкой стало удобнее. Пластиковая трубка, предназначенная для поддерживания антенного провода машинки в вертикальном положении, сломалась, пришлось установить на машинку съёмную антенну.
После ремонта и переделки машинка без поломок работает уже много месяцев.
Аппаратура радиоуправления
Предлагаемый радиоприёмник предназначен для слежения за обстановкой в эфире в диапазоне 26,957 — 27,283 МГц, отведённом для радиоуправления моделями. Наличие радиопомех, создаваемых как аппаратурой радиоуправления другими моделями, так и радиопередатчиками различного назначения, работающими .
Как переделать модули радиопередатчика типа FS1000A и приемника типа XV-MR-5V для организации аналогового канала связи. Как-то возникла необходимость в передаче аналогового сигнала. Модуль передатчика FS1000A представляет собой простой однокаскадный микромощный передатчик на транзисторе Q1 .
Схема передатчика и приемника на диапазон 27МГц для работы с двухтональной кодировкой команд (DTMF), применяющаяся в телефонии, очень удобна так же и для устройства радиоуправления. Сигнал можно передать по любому аналоговому каналу связи, высокая помехозащищенность и относительная доступность .
Эта схема предназначена для управления электродвигателем модели трамвая. Модель трамвая движется по отрезку железной дороги то в одну, то в другую сторону. Еще есть стрелка и тупик в депо. Модель должна двигаться по основному отрезку пути сначала в одну сторону, затем в конце пути ударяется .
Схема подключения модулей TX118SA-4 и RX480E-4 для организации четырехканальной системы радиоуправления. Наверное, многие хотели бы дистанционно управлять различными бытовыми приборами, и самодельными устройствами. Но их останавливает сложность изготовления передатчика и приемника, необходимость .
Принципиальная схема простой КВ аппаратуры радиоуправления на 27МГц, построенной на транзисторах 9018 и микросхеме LM386. Этот радиотракт работает на частоте 27,12 МГц, его можно использовать дляпропорционального радиоуправления моделями, либо в любом случае, когда нужно передать НЧ-сигнал на .
Принципиальная схема дистанционного радиоуправления на основе китайского квартирного радиозвонка. В магазинах электротоваров можно приобрести квартирный звонок с радиоуправлением. Устройство производится в Китае, и состоит из двух модулей, питающихся от автономных источников. Один из модулей .
Принципиальная схема системы радиоуправления, построенной на основе телефона-трубки, рабочая частота — 433МГц. В конце 90-х были очень популярны телефоны-трубки, да и сейчас они повсюду продаются. Но, сотовая связь болееудобна и сейчас повсеместно вытесняет стационарную. Купленные когда-то .
Существуют игрушки — модели вездеходов, танков, луноходов, у которых есть две гусеницы или два ряда колес, работающих от отдельных электродвигателей. При этом поворот выполняется отключением одного из двигателей (с той стороны, в которую нужно повернуть). Поворот происходит резко или нужно его регулировать скачками включая — выключая сторону движителя.
Это устройство в основном предназначено для управления гаражными дверями, центральным замком в автомобиле, освещением, включением сигнализации на расстоянии и т. д. Использованные в его конструкции специализированные схемы фирмы UMC UM3758-130A позволяют установить З12 комбинаций кодов. Весь.
Радиоуправляемая модель гоночного автомобиля своими руками

Доброго времени суток любители помастерить что своими руками. В сегодняшней статье будем собирать довольно интересную самоделку для вашего досуга и веселого времяпровождения. А именно соберём радиоуправляемую модель автомобиля. Одной из ключевой особенностью данной самоделки является то что она будет собрана из максимально самодельных и доступных комплектующих использовав минимальное количество покупных заводских элементов. Данную самоделку ни в коем случае нельзя отнести к каким-то серьёзным моделям, но она запросто сможет обогнать любую игрушечную модель из детского магазина игрушек и в добавок ещё иметь больший функционал (по количеству разных настроек). Эта самоделка может уступить игрушкам лишь внешним видом, но тут уже все зависит от вас.
Ссылки на некоторые компоненты конструкции вы можете найти в конце статьи.
Для данной радиоуправляемой модели автомобиля понадобится следующее, а именно:
— Металлические оси
— Пластиковая труба 20мм
— Подшипники
— Колеса 4шт
— Небольшой кусочек резины (например, от велокамеры)
— Алюминиевый профиль (тот что используется для монтажа гипсокартона)
— Электродвигатель
— Небольшой лист фанеры
— Пластиковые стяжки
— Металлические шайбы
— Болты
— Гайки
— Листовой ПВХ пластик
— Сервопривод
— Регулятор оборотов коллекторного электродвигателя
— Аккумуляторная батарея
— Аппаратура радиоуправления со своим приемником
— Обыкновенный гофрированный картон

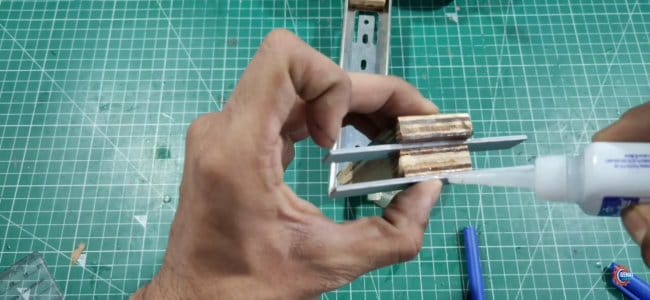
В случаем с автором, каких-либо трудностей с установкой подшипников на вал не возникло, их диаметры четко совпали, а вот с внешним корпусом оси в виде пластиковой трубы пришлось слегка повозиться. Так как подшипники не влезли в трубу, причем им не хватает всего пары миллиметров, автор решил взять ступенчатое сверло и немного увеличить отверстия по краям. После вооружившись молотком получилось забить подшипники в трубу (см. фото). Хоть подшипники и сидят плотно, все же необходимо дополнительно закрепить их суперклеем. Вставляем ось в подшипники и переходим к следующему шагу.





Для следующего шага понадобятся колеса. Колеса можно купить отдельно от профессиональных моделей, либо снять со старых игрушек. Так как у нас нет возможности закреплять колеса с помощью гаек, в таком случае нам бы понадобились услуги токаря. Автор же сделал все максимально бюджетно, подобрал подходящее по диаметру корончатое сверло и сделал заглушки для колесных дисков из фанерного листа, и уже сам вал необходимо будет забивать в фанерные заглушки.


Как уже ранее говорилось выпиливаем фанерные заглушки такого диметра чтобы они плотно забивались в колесные диски. Запрессовав заглушки во внутрь каждого диска, желательно дополнительно бы закрепить их при помощи суперклея.


Далее необходимо обеспечить передачу привода с мотора на колеса. Для этого необходимо вырезать из фанеры круглую заготовку, причем круг должен быть максимально ровным, иначе будет неравномерная передача момента. Рекомендую вырезать такую деталь корончатым сверлом. От диаметра данной окружности зависит скорость и тяга модели, так как данная окружность является ведомым роликом. Чем она будет больше, тем ниже скорость, но больше тяга, и наоборот, чем она меньше, тем выше скорость, но меньше тяга.

Вырезав окружность её следует хоть немного зашлифовать дабы убрать появившиеся во время вырезания зазубрины. Чтобы обеспечить хорошее сцепление между ведомым и ведущим роликом на них необходимо наклеить резину таким образом получив резиновую поверхность. Подходящий по размеру отрезок резины можно вырезать из старой колесной камеры. Потом просто аккуратно приклеиваем при помощи суперклея резину так, чтобы она не стыковалась внахлёст и не было зазора между краями. Так как это тоже непосредственно повлияет на передачу крутящего момента.


Сразу после получившейся ведомый ролик надеваем на металлический колесный вал изготовленный в самом начале так как это изображено на фото ниже. В данном случае обязательно использование суперклея, так как данный ролик не должен прокручиваться на оси. Надеваем с обеих сторон колеса на вал и задняя ось у нас практически готова.




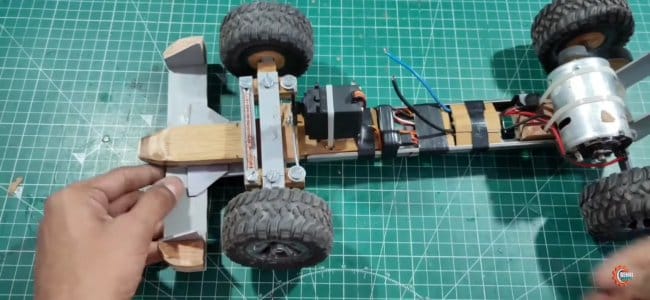
Переходим к изготовлению рамы автомобиля. Раму автор решил сделать из простого алюминиевого профиля, который используется при монтаже гипсокартона. Длина рамы подбирается вами индивидуально так как от это напрямую зависит размер готовой модели. Закрепляем нашу заднюю ось на раме при помощи пластиковых стяжек и суперклея (см. фото).


Далее на раму необходимо закрепить электродвигатель. Перед тем как его крепить на его валу необходимо закрепить ведущий ролик. Его также изготавливаем из фанеры и тоже обклеиваем резиной для сцепления. От размера ролика также зависит скорость и тяга модели, но только обратно пропорционально ведомому ролику. Закрепить двигатель необходимо так, чтобы ролики соприкасались между собой, для этого автор использовал специальную фанерную проставку.



Для того, чтобы обеспечить чуть большее сцепление, автор дополнительно прижал электродвигатель пластиковыми стяжками, с их помощью ролики будут меньше проскальзывать.


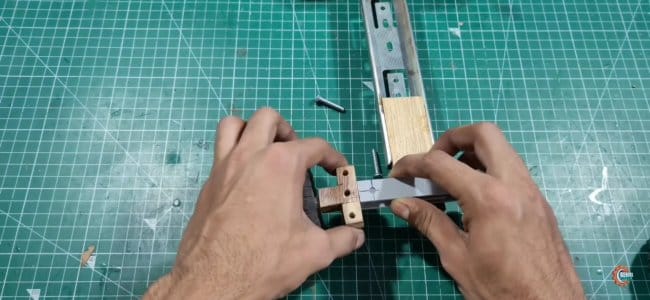
Изготовим рулевые кулаки. Просто из фанеры вырезаем две «Т» образные заготовки и проделываем в них все необходимые для их работы отверстия (см. фото). Эти кулаки естественно следует установить на два оставшихся колеса. Закреплять их следует на полуосях, которые представляет из себя болты с гайками, которые вращаются внутри колеса. Сами кулаки закрепляем на полуосях суперклеем.



Изготавливаем переднюю балку. Для неё понадобится листовой ПВХ пластик и небольшая дощечка или фанерка. На фанерный прямоугольник перпендикулярно нужно приклеить две пластиковые полосы с разных сторон (см. фото). Между этими пластиковыми элементами и будут крепиться рулевые кулаки. Кулаки к ним будем
крепить с помощью болтов и гаек, так вот как раз для них проделываем сквозные крепёжные отверстия.


Устанавливаем кулаки на свое место закрепив их болтами с гайками, но ещё стоит отметить то что между пластиковыми балками и кулаками желательно подложить по одной металлической шайбе. После чего для того чтобы колеса стали зависимыми друг от друга, то есть при повороте одного колеса поворачивало и другое. Изготавливаем и закрепляем распорку. Тут как раз-таки время выставить развал схождения, в радиоуправляемых моделях делают это не совсем так, как у настоящих. Передние колеса должны слегка смотреть в разные стороны «в наружу», так управляемость и удержание прямой будет более легкое чем если они стояли ровно.



После чего устанавливаем сервопривод на модель, соединяем качалку привода с хотя бы одним из рулевых кулаков и практически все готово! Остаётся лишь нацепить всю электронику, а именно приемник и регулятор оборотов, запитать все это при помощи аккумулятора и можно стартовать. Электронику следует подключать так как указывает в инструкции производитель именно ваших комплектующих. Доделываем внешний вид автомобиля и тестируем



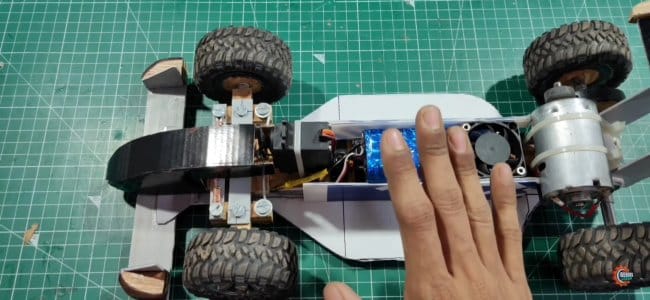
Все готово! В итоге у нас получилась весьма интересная радиоуправляемая модель, которая может занять вас и вашего ребёнка на долгое время.




Вот видео автора самоделки:
Ну и всем спасибо за внимание и удачи в будущих проектах самодельщики!







