- Однофазный асинхронный двигатель: как устроен и работает
- Трехфазный асинхронный двигатель
- Трехфазный асинхронный двигатель с короткозамкнутым ротором
- Конструкция асинхронного электродвигателя
- Принцип работы. Вращающееся магнитное поле
- Концепция вращающегося магнитного поля
- Действие вращающегося магнитного поля на замкнутый виток
- Короткозамкнутый ротор асинхронного двигателя
- Скольжение асинхронного двигателя. Скорость вращения ротора
- Звезда и треугольник
- Обозначение выводов статора трехфазного электродвигателя
- Подключение трехфазного асинхронного двигателя к однофазной сети с помощью фазосдвигающего элемента
- Управление асинхронным двигателем
- Прямое подключение к сети питания
- Нереверсивная схема
- Реверсивная схема
- Плавный пуск асинхронного электродвигателя
- Частотное управление асинхронным электродвигателем
- Трехфазный асинхронный двигатель с фазным ротором
- Конструкция АДФР
- Фазный ротор
- Статор АДФР
- Обозначение выводов вторичных обмоток трехфазного АДФР
- Пуск АДФР
Однофазный асинхронный двигатель: как устроен и работает
 Само название этого электротехнического устройства свидетельствует о том, что электрическая энергия, поступающая на него, преобразуется во вращательное движение ротора. Причем прилагательное «асинхронный» характеризует несовпадение, отставание скоростей вращения якоря от магнитного поля статора.
Само название этого электротехнического устройства свидетельствует о том, что электрическая энергия, поступающая на него, преобразуется во вращательное движение ротора. Причем прилагательное «асинхронный» характеризует несовпадение, отставание скоростей вращения якоря от магнитного поля статора.
Слово «однофазный» вызывает неоднозначное определение. Связано это с тем, что термин «фаза» в электрике определяет несколько явлений:
сдвиг, разность углов между векторными величинами;
потенциальный проводник двух, трех или четырехпроводной электрической схемы переменного тока;
одну из обмоток статора или ротора трехфазного двигателя либо генератора.
Поэтому сразу уточним, что однофазным электродвигателем принято называть тот, который работает от двухпроводной сети переменного тока, представленной фазным и нулевым потенциалом. Количество обмоток, вмонтированных в различных конструкциях статоров, на это определение не влияют.
Конструкция электродвигателя
По своему техническому устройству асинхронный двигатель состоит из:
1. статора — статической, неподвижной части, выполненной корпусом с расположенными на нем различными электротехническими элементами;
2. ротора, вращаемого силами электромагнитного поля статора.
Механическое соединение этих двух деталей выполнено за счет подшипников вращения, внутренние кольца которых посажены на подогнанные гнезда вала ротора, а внешние вмонтированы в защитные боковые крышки, закрепляемые на статоре.

Ротор
Его устройство у этих моделей такое же, как у всех асинхронных двигателей: на стальном валу смонтирован магнитопровод из шихтованных пластин на основе мягких сплавов железа. На его внешней поверхности выполнены пазы, в которые вмонтированы стержни обмоток из алюминия или меди, закороченные по концам на замыкающие кольца.
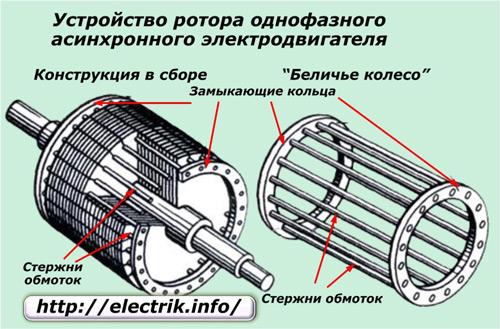
В обмотке ротора протекает электрический ток, индуцируемый магнитным полем статора, а магнитопровод служит для хорошего прохождения создаваемого здесь же магнитного потока.
Отдельные конструкции ротора у однофазных двигателей могут быть выполнены из немагнитных или ферромагнитных материалов в форме цилиндра.
Статор
Конструкция статора также представлена:
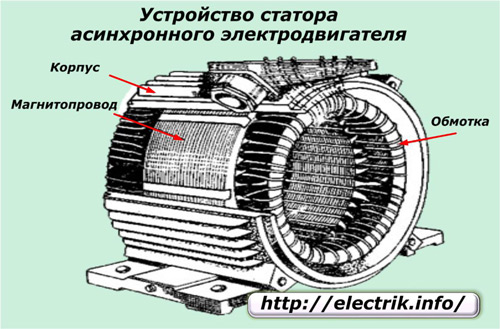
Его основное назначение заключается в генерировании неподвижного или вращающегося электромагнитного поля.
Статорная обмотка обычно состоит из двух контуров:
У самых простых конструкций, предназначенных для ручной раскрутки якоря, может быть выполнена всего одна обмотка.
Принцип работы асинхронного однофазного электрического двигателя
С целью упрощения изложения материала представим, что обмотка статора выполнена всего одним витком петли. Ее провода внутри статора разносят по кругу на 180 угловых градусов. По ней проходит переменный синусоидальный ток, имеющий положительные и отрицательные полуволны. Он создает не вращающееся, а пульсирующее магнитное поле.
Как возникают пульсации магнитного поля
Разберем этот процесс на примере протекания положительной полуволны тока в моменты времени t1, t2, t3.
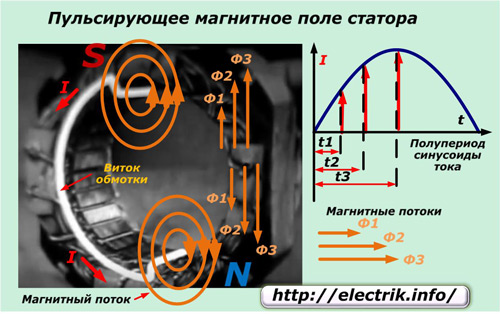
Она проходит по верхней части токопровода по направлению к нам, а по нижней — от нас. В перпендикулярной плоскости, представленной магнитопроводом, вокруг проводника возникают магнитные потоки Ф.
Изменяющиеся по амплитуде токи в рассматриваемые моменты времени создают разные по величине электромагнитные поля Ф1, Ф2, Ф3. Поскольку ток в верхней и нижней половине один и тот же, но виток изогнут, то магнитные потоки каждой части направлены встречно и уничтожают действие друг друга. Определить это можно по правилу буравчика или правой руки.
Как видим, при положительной полуволне вращения магнитного поля не наблюдается, а происходит только его пульсация в верхней и нижней части провода, которая еще и взаимно уравновешивается в магнитопроводе. Этот же процесс происходит при отрицательном участке синусоиды, когда токи изменяют направление на противоположное.
Поскольку вращающееся магнитное поле отсутствует, то и ротор останется неподвижным, ибо нет сил, приложенных к нему для начала вращения.
Как создается вращение ротора в пульсирующем поле
Если придать ротору вращение, хотя бы рукой, то он будет продолжать это движение. Для объяснения этого явления покажем, что суммарный магнитный поток изменяется по частоте синусоиды тока от нуля до максимального значения в каждом полупериоде (с изменением направления на противоположное) и состоит из двух частей, образуемых в верхней и нижней ветвях, как показано на рисунке.
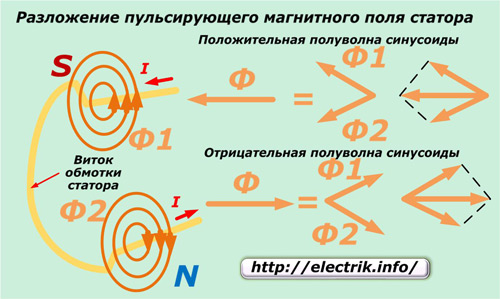
Магнитное пульсирующее поле статора состоит из двух круговых с амплитудой Фмакс/2 и двигающихся в противоположных направлениях с одной частотой.
В этой формуле обозначены:
nпр и nобр частоты вращения магнитного поля статора в прямом и обратном направлениях;
n1 — скорость вращающегося магнитного потока (об/мин);
p — число пар полюсов;
f — частота тока в обмотке статора.
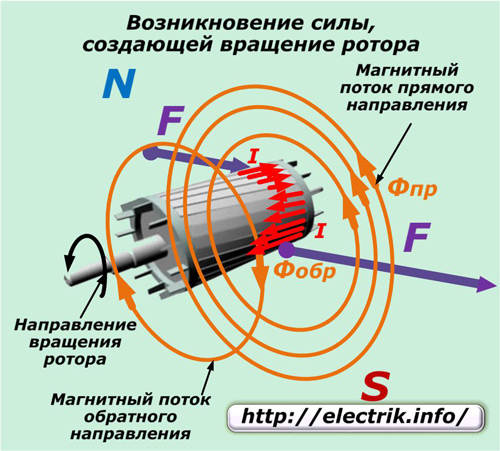
Теперь рукой придадим вращение двигателю в одну сторону, и он сразу подхватит движение за счет возникновения вращающегося момента, вызванного скольжением ротора относительно разных магнитных потоков прямого и обратного направлений.
Примем, что магнитный поток прямого направления совпадает с вращением ротора, а обратный, соответственно, будет противоположен. Если обозначить через n2 частоту вращения якоря в об/мин, то можно записать выражение n2
Например, электродвигатель работает от сети 50 Гц с n1=1500, а n2=1440 оборотов в минуту. Его ротор имеет скольжение относительно магнитного потока прямого направления Sпр=0,04 и частоту тока f2пр=2 Гц. Обратное же скольжение Sобр=1,96, а частота тока f2обр=98 Гц.
На основании закона Ампера при взаимодействии тока I2пр и магнитного поля Фпр появится вращающий момент Мпр.
Здесь величина постоянного коэффициента сМ зависит от конструкции двигателя.
При этом также действует обратный магнитный поток Мобр, который вычисляется по выражению:
В итоге взаимодействия этих двух потоков появится результирующий:
Внимание! При вращении ротора в нем наводятся токи разной частоты, которые создают моменты сил с разными направлениями. Поэтому якорь двигателя будет совершать вращение под действием пульсирующего магнитного поля в ту сторону, с которой он начал вращение.
Во время преодоления однофазным двигателем номинальной нагрузки создается небольшое скольжение с основной долей прямого крутящего момента Мпр. Противодействие тормозного, обратного магнитного поля Мобр сказывается совсем незначительно из-за различия частот токов прямого и обратного направлений.
f2обр обратного тока значительно превышает f2пр, а создаваемое индуктивное сопротивление Х2обр сильно превышает активную составляющую и обеспечивает большое размагничивающее действие обратного магнитного потока Фобр, который в итоге этого уменьшается.
Поскольку коэффициент мощности у двигателя под нагрузкой небольшой, то обратный магнитный поток не может оказать сильное воздействие на вращающийся ротор.
Когда же одна фаза сети подана на двигатель с неподвижным ротором (n2=0), то скольжения, как прямое, так и обратное равны единице, а магнитные поля и силы прямого и обратного потоков уравновешены и вращения не возникает. Поэтому от подачи одной фазы невозможно раскрутить якорь электродвигателя.
Как быстро определить частоту вращения двигателя:
Как создается вращение ротора у однофазного асинхронного двигателя
За всю историю эксплуатации подобных устройств разработаны следующие конструкторские решения:
1. ручная раскрутка вала рукой или шнуром;
2. использование дополнительной обмотки, подключаемой на время запуска за счет омического, емкостного или индуктивного сопротивления;
3. расщепление короткозамкнутым магнитным витком магнитопровода статора.
Первый способ использовался в начальных разработках и не стал применяться в дальнейшем из-за возможных рисков получения травм при запуске, хотя он не требует подключения дополнительных цепочек.
Применение фазосдвигающей обмотки в статоре
Чтобы придать начальное вращение ротору к статорной обмотке дополнительно на момент запуска подключают еще одну вспомогательную, но только сдвинутую по углу на 90 градусов. Ее выполняют более толстым проводом для пропускания бо́льших токов, чем протекающие в рабочей.
Схема подключения такого двигателя показана на рисунке справа.

Здесь для включения применяется кнопка типа ПНВС, которая специально создана для таких двигателей и широко использовалась в работе стиральных машин, выпускаемых при СССР. У этой кнопки сразу включаются 3 контакта таким образом, что два крайних после нажатия и отпускания остаются зафиксированы во включенном состоянии, а средний — кратковременно замыкается, а потом под действием пружины возвращается в исходное положение.
Замкнутые же крайние контакты можно отключить нажатием на соседнюю кнопку «Стоп».

Кроме кнопочного выключателя для отключений дополнительной обмотки в автоматическом режиме используются:
1. центробежные переключатели;
2. дифференциальные или токовые реле;
Для улучшения запуска двигателя под нагрузкой применяются дополнительные элементы в фазосдвигающей обмотке.
Подключение однофазного двигателя с пусковым сопротивлением
В такой схеме к статорной дополнительной обмотке последовательно монтируется омическое сопротивление. При этом намотка витков выполняется биффилярным способом, обеспечивающим коэффициент самоиндукции катушки очень близким к нулю.
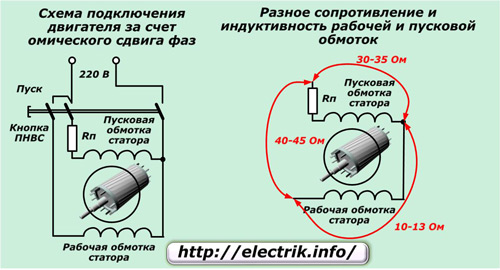
За счет выполнения этих двух приемов при прохождении токов по разным обмоткам между ними возникает сдвиг по фазе порядка 30 градусов, чего вполне достаточно. Разность углов создается за счет изменения комплексных сопротивлений в каждой цепи.
При этом методе еще может встречаться пусковая обмотка с заниженной индуктивностью и увеличенным сопротивлением. Для этого применяют намотку с маленьким числом витков провода заниженного поперечного сечения.
Подключение однофазного двигателя с конденсаторным запуском
Емкостной сдвиг токов по фазе позволяет создать кратковременное подключение обмотки с последовательно соединенным конденсатором. Эта цепочка работает только во время выхода двигателя на режим, а затем отключается.
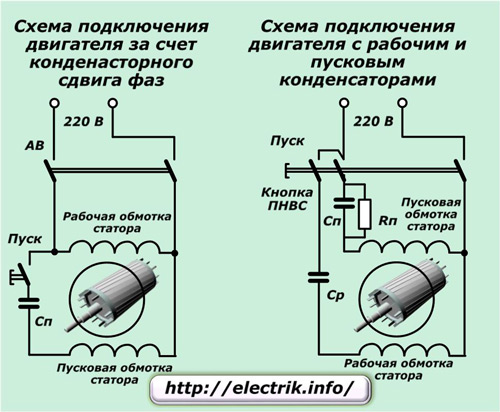
У конденсаторного запуска создается наибольший крутящий момент и более высокий коэффициент мощности, чем при резистивном или индуктивном способе запуска. Он может достигать величины 45÷50% от номинального значения.
В отдельных схемах к цепочке рабочей обмотки, которая постоянно включена, тоже добавляют емкость. За счет этого добиваются отклонения токов в обмотках на угол порядка π/2. При этом в статоре сильно заметен сдвиг максимумов амплитуд, который обеспечивает хороший крутящий момент на валу.
За счет этого технического приема двигатель при пуске способен выработать больше мощности. Однако, такой метод используют только с приводами тяжелого запуска, например, для раскрутки барабана стиральной машины, заполненного бельем с водой.
Конденсаторный запуск позволяет изменять направление вращения якоря. Для этого достаточно сменить полярность подключения пусковой или рабочей обмотки.
Подключение однофазного двигателя с расщепленными полюсами
У асинхронных двигателей с небольшой мощностью порядка 100 Вт используют расщепление магнитного потока статора за счет включения в полюс магнитопровода короткозамкнутого медного витка.
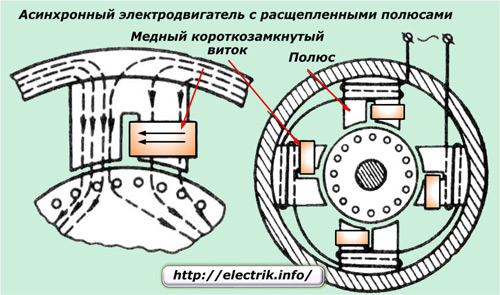
Разрезанный на две части такой полюс создает дополнительное магнитное поле, которое сдвинуто от основного по углу и ослабляет его в месте охваченного витком. За счет этого создается эллиптическое вращающееся поле, образующее момент вращения постоянного направления.
В подобных конструкциях можно встретить магнитные шунты, выполненные стальными пластинками, которые замыкают края наконечников статорных полюсов.
Двигатели подобных конструкций можно встретить в вентиляторных устройствах обдува воздуха. Они не обладают возможностью реверса.
Трехфазный асинхронный двигатель
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Конструкция асинхронного электродвигателя
Трехфазный асинхронный электродвигатель, как и любой электродвигатель, состоит из двух основных частей — статора и ротора. Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0,5-2 мм.
Статор состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком. Шихтованная конструкция сердечника способствует значительному снижению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. Обмотки статора располагаются в пазах сердечника.
Ротор состоит из сердечника с короткозамкнутой обмоткой и вала. Сердечник ротора тоже имеет шихтованную конструкцию. При этом листы ротора не покрыты лаком, так как ток имеет небольшую частоту и оксидной пленки достаточно для ограничения вихревых токов.
Принцип работы. Вращающееся магнитное поле
Принцип действия трехфазного асинхронного электродвигателя основан на способности трехфазной обмотки при включении ее в сеть трехфазного тока создавать вращающееся магнитное поле.
Вращающееся магнитное поле — это основная концепция электрических двигателей и генераторов.


Частота вращения этого поля, или синхронная частота вращения прямо пропорциональна частоте переменного тока f1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки.
 ,
,
- где n1 – частота вращения магнитного поля статора, об/мин,
- f1 – частота переменного тока, Гц,
- p – число пар полюсов
Концепция вращающегося магнитного поля
Чтобы понять феномен вращающегося магнитного поля лучше, рассмотрим упрощенную трехфазную обмотку с тремя витками. Ток текущий по проводнику создает магнитное поле вокруг него. На рисунке ниже показано поле создаваемое трехфазным переменным током в конкретный момент времени


Составляющие переменного тока будут изменяться со временем, в результате чего будет изменяться создаваемое ими магнитное поле. При этом результирующее магнитное поле трехфазной обмотки будет принимать разную ориентацию, сохраняя при этом одинаковую амплитуду.





Действие вращающегося магнитного поля на замкнутый виток
Теперь разместим замкнутый проводник внутри вращающегося магнитного поля. По закону электромагнитной индукции изменяющееся магнитное поле приведет к возникновению электродвижущей силы (ЭДС) в проводнике. В свою очередь ЭДС вызовет ток в проводнике. Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.
 Влияние вращающегося магнитного поля на замкнутый проводник с током
Влияние вращающегося магнитного поля на замкнутый проводник с током
Короткозамкнутый ротор асинхронного двигателя
По этому принципу также работает асинхронный электродвигатель. Вместо рамки с током внутри асинхронного двигателя находится короткозамкнутый ротор по конструкции напоминающий беличье колесо. Короткозамкнутый ротор состоит из стержней накоротко замкнутых с торцов кольцами.
 Короткозамкнутый ротор «беличья клетка» наиболее широко используемый в асинхронных электродвигателях (показан без вала и сердечника)
Короткозамкнутый ротор «беличья клетка» наиболее широко используемый в асинхронных электродвигателях (показан без вала и сердечника)
Трехфазный переменный ток, проходя по обмоткам статора, создает вращающееся магнитное поле. Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться. На рисунке ниже Вы можете заметить различие между индуцируемыми токами в стержнях. Это происходит из-за того что величина изменения магнитного поля отличается в разных парах стержней, из-за их разного расположения относительно поля. Изменение тока в стержнях будет изменяться со временем.


Вы также можете заметить, что стержни ротора наклонены относительно оси вращения. Это делается для того чтобы уменьшить высшие гармоники ЭДС и избавиться от пульсации момента. Если стержни были бы направлены вдоль оси вращения, то в них возникало бы пульсирующее магнитное поле из-за того, что магнитное сопротивление обмотки значительно выше магнитного сопротивления зубцов статора.
Скольжение асинхронного двигателя. Скорость вращения ротора
Отличительный признак асинхронного двигателя состоит в том, что частота вращения ротора n2 меньше синхронной частоты вращения магнитного поля статора n1.
Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n2  Трехфазный ток (разница фаз 120°)
Трехфазный ток (разница фаз 120°)
Звезда и треугольник
Трехфазная обмотка статора электродвигателя соединяется по схеме «звезда» или «треугольник» в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
Фазное напряжение — разница потенциалов между началом и концом одной фазы. Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль).
Линейное напряжение — разность потенциалов между двумя линейными проводами (между фазами).
| Звезда | Треугольник | Обозначение |
|---|---|---|
 |  | Uл, Uф — линейное и фазовое напряжение, В, |
 |  | Iл, Iф — линейный и фазовый ток, А, |
 |  | S — полная мощность, Вт |
 | | P — активная мощность, Вт |
S = 1,73∙380∙1 = 658 Вт.
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:
S = 1,73∙380∙3 = 1975 Вт.
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
 Подключение электродвигателя по схеме звезда и треугольник
Подключение электродвигателя по схеме звезда и треугольник
Обозначение выводов статора трехфазного электродвигателя
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | U1 | U2 |
| вторая фаза | V1 | V2 |
| третья фаза | W1 | W2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | U | |
| вторая фаза | V | |
| третья фаза | W | |
| точка звезды (нулевая точка) | N | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | U | |
| второй вывод | V | |
| третий вывод | W | |
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | C1 | C4 |
| вторая фаза | C2 | C5 |
| третья фаза | C3 | C6 |
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | C1 | |
| вторая фаза | C2 | |
| третья фаза | C3 | |
| нулевая точка | 0 | |
| Соединение треугольником (число выводов 3) | ||
| первый вывод | C1 | |
| второй вывод | C2 | |
| третий вывод | C3 | |
Подключение трехфазного асинхронного двигателя к однофазной сети с помощью фазосдвигающего элемента
Трехфазные асинхронные электродвигатели могут быть подключены к однофазной сети с помощью фазосдвигаюших элементов. При этом электродвигатель будет работать либо в режиме однофазного двигателя с пусковой обмоткой (рисунок а, б, г) либо в режиме конденсаторного двигателя с постоянно включенным рабочим конденсатором (рисунок в, д, е).
 Схемы подключения трехфазного асинхронного электродвигателя к однофазной сети
Схемы подключения трехфазного асинхронного электродвигателя к однофазной сети
Схемы приведенные на рисунке «а», «б», «д» применяются, когда выведены все шесть концов обмотки. Электродвигатели с соединением обмоток согласно схемам «а», «б», «г» практически равноценны двигателям, которые спроектированы как однофазные электродвигатели с пусковой обмоткой. Номинальная мощность при этом состовляет 40-50% от мощности в трехфазном режиме, а при работе с рабочим конденсатором 75-80%.
Емкость рабочего конденсатора при частоте тока 50 Гц для схем «в», «д», «е» примерно рассчитывается соответственно по формулам:






- ,где Cраб — емкость рабочего конденсатора, мкФ,
- Iном – номинальный (фазный) ток статора трехфазного двигателя, А,
- U1 – напряжение однофазной сети, В.
Управление асинхронным двигателем
- Способы подключения асинхронного электродвигателя к сети питания:
- прямое подключение к сети питания
- подключение от устройства плавного пуска
- подключение от преобразователя частоты
 Варианты подключения асинхронного электродвигателя с помощью магнитного пускателя (слева), устройства плавного пуска (посеридине) и частотного преобразователя (справа). Схемы представлены в упрощенном виде.
Варианты подключения асинхронного электродвигателя с помощью магнитного пускателя (слева), устройства плавного пуска (посеридине) и частотного преобразователя (справа). Схемы представлены в упрощенном виде.
FU1-FU9 — плавкие предохранители, KK1 — тепловое реле, KM1 — магнитный пускатель, L1-L3 — контакты для подключения к сети трехфазного переменного тока, M1-M3 — асинхронные электродвигатели, QF1-QF3 — автоматические выключатели, UZ1 — устройство плавного пуска, UZ2 — преобразователь частоты
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
- нереверсивного пуска: пуск и остановка;
- реверсивного пуска: пуск, остановка и реверс.
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Нереверсивная схема
Реверсивная схема
Недостатком прямой коммутации обмоток асинхронного электродвигателя с сетью является наличие больших пусковых токов, во время запуска электродвигателя.
Плавный пуск асинхронного электродвигателя
В задачах, где не требуется регулировка скорости электродвигателя во время работы для уменьшения пусковых токов используется устройство плавного пуска.
Устройство плавного пуска защищает асинхронный электродвигатель от повреждений вызванных резким увеличением потребляемой энергии во время пуска путем ограничения пусковых токов. Устройство плавного пуска позволяет обеспечить плавный разгон и торможение асинхронного электродвигателя.
Устройство плавного пуска дешевле и компактнее частотного преобразователе. Применяется там, где регулировка скорости вращения и момента требуется только при запуске.
Частотное управление асинхронным электродвигателем
Для регулирования скорости вращения и момента асинхронного двигателя используют частотный преобразователь. Принцип действия частотного преобразователя основан на изменении частоты и напряжения переменного тока.
- Использование частотного преобразователя позволяет:
- уменьшить энергопротребление электродвигателя;
- управлять скоростью вращения электродвигателя (плавный запуск и остановка, регулировка скорости во время работы);
- избежать перегрузок электродвигателя и тем самым увеличить его срок службы.
 Функциональная схема частотно-регулируемого привода
Функциональная схема частотно-регулируемого привода
- В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем:
- скалярное управление;
- векторное управление.
Скалярное управление является простым и дешевым в реализации, но имеет следующие недостатки — медленный отклик на изменение нагрузки и небольшой диапазон регулирования. Поэтому скалярное управление обычно используется в задачах, где нагрузка либо постоянна, либо изменяется по известному закону (например, управление вентиляторами).
 Скалярное управление асинхронным двигателем с датчиком скорости
Скалярное управление асинхронным двигателем с датчиком скорости
Векторное управление используется в задачах, где требуется независимо управлять скоростью и моментом электродвигателя (например, лифт), что, в частности, позволяет поддерживать постоянную скорость вращения при изменяющемся моменте нагрузки. При этом векторное управление является самым эффективным управлением с точки зрения КПД и увеличения времени работы электродвигателя.
Среди векторных методов управления асинхронными электродвигателями наиболее широкое применение получили: полеориентированное управление и прямое управление моментом.
 Полеориентированное управления асинхронным электродвигателем по датчику положения ротора
Полеориентированное управления асинхронным электродвигателем по датчику положения ротора
Полеориентированное управление позволяет плавно и точно управлять параметрами движения (скоростью и моментом), но при этом для его реализации требуется информация о направлениии вектора потокосцепления ротора двигателя.
- По способу получения информации о положении потокосцепления ротора электродвигателя выделяют:
- полеориентированное управление по датчику;
- полеориентированное управление без датчика: положение потокосцепления ротора вычисляется математически на основе той информации, которая имеется в частотном преобразователе (напряжение питания, напряжения и токи статора, сопротивление и индуктивность обмоток статора и ротора, количество пар полюсов двигателя).
 Полеориентированное управления асинхронным электродвигателем без датчика положения ротора
Полеориентированное управления асинхронным электродвигателем без датчика положения ротора
Прямое управление моментом имеет простую схему и высокую динамику работы, но при этом высокие пульсации момента и тока.
Трехфазный асинхронный двигатель с фазным ротором
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в «звезду», а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.
 Фазный ротор
Фазный ротор
Статор АДФР
Статор асинхронного двигателя с фазным ротором по конструкции не отличается от статора асинхронного двигателя с короткозамкнутым ротором.
Обозначение выводов вторичных обмоток трехфазного АДФР
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | K1 | K2 |
| вторая фаза | L1 | L2 |
| третья фаза | M1 | M2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | K | |
| вторая фаза | L | |
| третья фаза | M | |
| точка звезды (нулевая точка) | Q | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | K | |
| второй вывод | L | |
| третий вывод | M | |
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | Р1 | |
| вторая фаза | Р2 | |
| третья фаза | Р3 | |
| нулевая точка | 0 | |
| Соединение треугольником (число выводов 3) | ||
| первый вывод | Р1 | |
| второй вывод | Р2 | |
| третий вывод | Р3 | |
Пуск АДФР

Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора.
Применяются проволочные и жидкостные реостаты.
Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически с помощью контакторов или контроллера с электрическим приводом.
Жидкостный реостат представляет собой сосуд с электролитом, в котором опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов [3].
Для повышения КПД и снижения износа щеток некоторые АДФР содержат специальное устройство (короткозамкнутый механизм), которое после запуска поднимает щетки и замыкает кольца.
При реостатном пуске достигаются благоприятные пусковые характеристики, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. В настоящее время АДФР заменяются комбинацией асинхронного электродвигателя с короткозамкнутым ротором и частотным преобразователем.







