- Какие существуют схемы подключения электродвигателей постоянного тока
- Электродвигатели постоянного тока
- Торможение электрического двигателя постоянного тока
- Преимущества двигателей постоянного тока
- Принцип действия ДПТ
- Принципиальные схемы ДПТ
- Схема для подключения двигателя с возбуждением параллельным
- Электродвигатель постоянного тока с параллельным возбуждением
- Бесщеточные моторы
- Схема подключения тягового двигателя постоянного тока
- Конструкция ДПТ
- Пуск двигателя постоянного тока
- Регулирование скорости вращения
- Электродвигатели постоянного тока. устройство и работа. виды
- Двигатель постоянного тока. Схемы соединения и характеристики ДПТ
- Конструкция ДПТ
- Пуск двигателя постоянного тока
- Регулирование скорости вращения
- Трёхфазный бесколлекторный электродвигатель постоянного тока
- Устройство электродвигателя
- Классификация МПТ по способу питания обмоток индуктора и якоря
- С независимым возбуждением
- С параллельным возбуждением
- С последовательным возбуждением
- С параллельно-последовательным (смешанным) возбуждением
- Плюсы – минусы
- Подключение к однофазным и трехфазным источникам питания
- Современное применение и перспективы
- Принцип работы
- Классификация
- Принцип преобразования энергии
- Виды двигателей и их устройство
- Асинхронные
- Синхронные
- Бесколлекторный электродвигатель постоянного тока. Общие сведения и устройство прибора
- Статор
- Ротор
- Система управления
- Общие технические характеристики электродвигателей постоянного тока П51, П52
- Условные обозначения двигателей постоянного тока серии П.
- Условия эксплуатации электродвигателей постоянного тока П51, П52.
- Габаритные и присоединительные размеры двигателей постоянного тока П51, П52, ПБ51, ПБ52
Какие существуют схемы подключения электродвигателей постоянного тока
В домашнем хозяйстве редко встретишь мотор, работающий на постоянном токе. Зато они всегда устанавливаются в детских игрушках, которые летают, ездят, шагают и т.д. Всегда они стоят в автомобилях: в различных приводах и вентиляторах. В электротранспорте чаще всего используют тоже их.
Другими словами, применяются двигатели постоянного тока там, где требуется достаточно широкий диапазон регулирования скорости и точность ее поддержания.
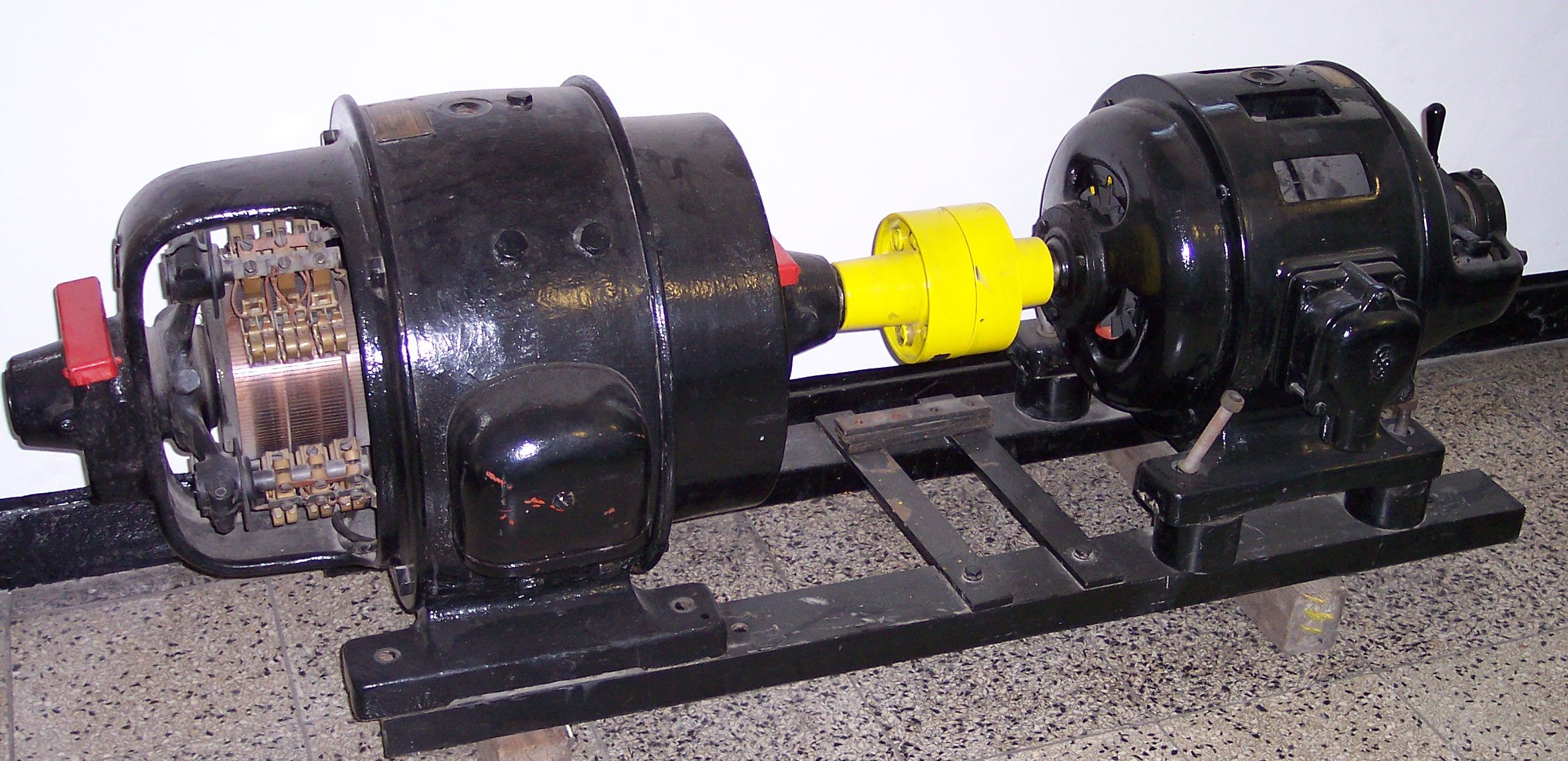
Электродвигатели постоянного тока
Электрическая мощность в моторе преобразуется в механическую, заставляющую его вращаться, а часть этой мощности расходуется на нагревание проводника. Конструкция двигателя электрического постоянного тока включает якорь и индуктор, которые разделяют воздушные зазоры. Индуктор, состоящий из добавочных и главных полюсов, и станины, предназначен для создания магнитного поля. Якорь, собранный из отдельных листов, обмотка рабочая и коллектор, благодаря которому постоянный ток подводится к рабочей обмотке, образуют магнитную систему. Коллектор – это насаженный на вал двигателя цилиндр, собранный из изолированных друг от друга медных пластин. К его выступам припаиваются концы обмотки якоря. Ток с коллектора снимается при помощи щеток, закрепленных в определенном положении в щеткодержателях, благодаря чему обеспечивается нужный прижим на поверхность коллектора. Щетки с корпусом двигателя соединяются с помощью траверса.
Щетки, в процессе работы, скользят по поверхности вращающегося коллектора, переходя от одной его пластины к другой. При этом, в параллельных секциях обмотки якоря происходит изменение тока (когда щетка накоротко замыкает виток). Процесс этот называют коммутацией.
Под влиянием своего магнитного поля, в замкнутой секции обмотки возникает ЭДС самоиндукции, вызывающая появление дополнительного тока, который на поверхности щеток распределяет неравномерно ток, что приводит к искрению.
Частота вращения – одна из важнейших его характеристик. Ее регулировать можно тремя способами: изменяя поток возбуждения, изменяя величину подводимого напряжения к двигателю, изменяя сопротивление в якорной цепи.
Два первых способа встречаются намного чаще третьего, ввиду его неэкономичности. Ток возбуждения регулируется при помощи любого устройства, у которого возможно изменять активное сопротивление (например, реостата). Регулирование при помощи изменения напряжения требует наличие источника постоянного тока: преобразователя или генератора. Такое регулирование применяют во всех промышленных электроприводах.
Торможение электрического двигателя постоянного тока
Для торможения электроприводов с ДПТ также есть три варианта: торможение противовключением, динамическое и рекуперативное. Первое происходит за счет изменения полярности тока в обмотке якоря и напряжения. Второе происходит благодаря замыканию накоротко (через резистор) обмотки якоря. Электрический двигатель при этом работает как генератор, преобразуя в электрическую, запасенную им механическую энергию, которая выделяется в виде тепла. Это торможение сопровождается мгновенной остановкой двигателя.
Последнее происходит, если электрический мотор, включенный в сеть, вращается со скоростью, которая выше скорости холостого хода. ЭДС обмотки двигателя в этом случае, превышает значение напряжении я в сети, что приводит к изменению на противоположное направление тока в обмотке мотора, т.е. двигатель отдает в сеть энергию, переходя в режим генератора. Одновременно возникает тормозной момент на валу.
Преимущества двигателей постоянного тока
Сравнивая их с асинхронными моторами, нужно отметить отличные пусковые качества, высокую (до 3000 об/мин) частоту вращения, а также хорошую регулировку. Из недостатков отметить можно? Сложность конструкции, низкую надежность, высокую стоимость и затраты на ремонт и обслуживание.
Принцип действия ДПТ
ДПТ, как и любой современный мотор, работает на основе «Правила левой руки», с которым все знакомы еще со школы и закона Фарадея. При подключении тока к нижней обмотке якоря в одном направлении, а к обмотке верхней – в другом, якорь начинает вращаться, а уложенные в его пазах проводники – выталкиваться магнитным полем статора или обмоток корпуса двигателя постоянного тока. Вправо выталкивается нижняя часть, а влево – верхняя. В результате якорь вращается до тех пор, пока его части не поменяются местами. Чтобы добиться непрерывного вращения, необходимо полярность обмотки якоря регулярно менять местами. Как раз этим и занимается коллектор, коммутирующий при вращении обмотки якоря. На коллектор от источника подается напряжение через пару прижимных щеток из графита.
Принципиальные схемы ДПТ
Двигатель переменного тока подключается просто, в отличие от ДПТ. Обычно у таких двигателей высокой и средней мощности имеются отдельные выводы в клеммной коробке (от обмотки и якоря). На якорь обычно подается полное напряжение, а на обмотку — ток, регулировать который можно реостатом или напряжением переменным. От величины тока, имеющегося на обмотке возбуждения, прямопропорционально зависят обороты двигателя переменного тока.
В зависимости от того, какая используется схема подключения электродвигателя постоянного тока, двигатель электрический может быть постоянного тока, разделяют на самовозбуждающиеся и с независимым возбуждением (от отдельного источника).
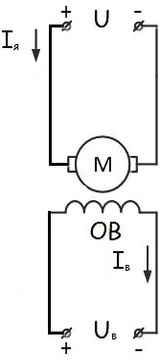
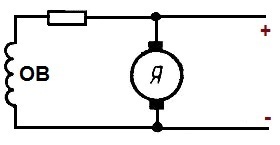
Схема для подключения двигателя с возбуждением параллельным
Она аналогична предыдущей, но не имеет отдельного источника питания.
Когда требуется большой пусковой ток, применяют двигатели с возбуждением последовательным: в городском электротранспорте (троллейбусах, трамваях, электровозах).
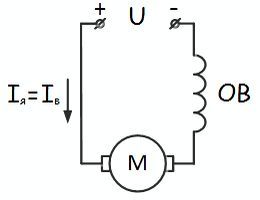
Токи обоих обмоток в этом случае одинаковы. Недостаток – требуется постоянная нагрузка на вал, поскольку при ее уменьшении на 25%, резко увеличивается частота вращения и происходит отказ двигателя.
Есть еще моторы, которые крайне редко используются — со смешанным возбуждением. Их схема представлена ниже.
Электродвигатель постоянного тока с параллельным возбуждением
Под понятием «возбуждение» понимают создание в электрических машинах магнитного поля, которое необходимо, чтобы заработал двигатель. Схем возбуждения несколько:
- С независимым возбуждением (питание обмотки происходит от постороннего источника).
- Электродвигатель постоянного тока с параллельным возбуждением (источник питания обмотки возбуждения и якоря включены параллельно) – шунтовые.
- С последовательным возбуждением (обе обмотки включены последовательно) – сериесные.
- Со смешанным возбуждением – компаундные.
Бесщеточные моторы
Но, двигатель со щетками, которые быстро изнашиваются и приводят к искрению, не может использоваться там, где необходима высокая надежность, поэтому среди электротранспорта (электровелосипедов, скутеров, мотоциклов и электромобилей) наибольшее применение нашли бесщеточные электродвигатели. Они отличаются высоким КПД, невысокой стоимостью, хорошей удельной емкостью, длительным сроком службы, малыми размерами, бесшумной работой.
Работа этого двигателя основывается на взаимодействии магнитных полей электромагнита и постоянного. Когда за окном 21 век, а вокруг полно мощных и недорогих проводников, логично заменить механический инвертор цифровым, добавить датчик положения ротора, решающий в какой момент на конкретную катушку необходимо подать напряжение, и получить бесщеточный электродвигатель постоянного тока. В качестве датчика чаще используется датчик Холла.
Поскольку в этом двигателе удалены щетки, он не нуждается в регулярном обслуживании. Управляется двигатель постоянного тока при помощи блока управления, позволяющего изменять частоту вращения вала мотора, стабилизировать на определенном уровне обороты (независимо от имеющейся на валу нагрузки).
Состоит блок управления из нескольких узлов:
- Системы импульсно-фазового управления СИФУ.
- Регулятора
- Защиты.
Схема подключения тягового двигателя постоянного тока
Двигатель постоянного тока нашел широкое применение в различных областях деятельности человека. Начиная от использования тягового привода, применяемого в трамваях и троллейбусах , заканчивая приводом прокатных станов и подъемных механизмов, где требуется поддержание высокой точности скорости вращения.
Основные положительные особенности , которые отличают ДПТ от асинхронного двигателя:
| — гибкие пусковые и регулировочные характеристики; |
| — двухзонное регулирование, которое позволяет достигать скорости вращения более 3000 об/мин. |
| — сложность в изготовлении и высокая стоимость; |
| — в процессе работы необходимо постоянное обслуживание, так как коллектор и токосъемные щетки имеют небольшой ресурс работы. |
Двигатель постоянного тока применяют только тогда, когда применение двигателя переменного тока невозможно или крайне нецелесообразно. В среднем, на каждые 70 двигателей переменного тока приходится всего лишь 1 ДПТ.
Конструкция ДПТ
Двигатель постоянного тока состоит из:
| — индуктора (статора); |
| — якоря (ротора); |
| — коллектора; |
| — токосъемных щеток; |
| — конструктивных элементов. |
Якорь и индуктор разделены между собой воздушным зазором. Индуктор представляет из себя станину, которая служит для того, чтобы закрепить основные и добавочные полюса магнитной системы двигателя. На основных полюсах располагаются обмотки возбуждения, а на добавочных – специальные обмотки, которые способствуют улучшению коммутации.
Коллектор подводит постоянный ток к рабочей обмотке, которая уложена в пазы ротора. Коллектор имеет вид цилиндра и состоит из пластин, изолированных друг от друга, он насажен на вал двигателя. Щетки служат для съема тока с коллектора, они крепятся в щеткодержателях для обеспечения правильного положения и надежного нажатия на поверхность коллектора.

Рисунок 1 – Конструкция двигателя постоянного тока
Двигатели постоянного тока классифицируют по магнитной системе статора:
2) ДПТ с электромагнитами :
| — ДПТ с независимым возбуждением; |
| — ДПТ с последовательным возбуждением; |
| — ДПТ с параллельным возбуждением; |
| — ДПТ со смешанным возбуждением. |

Рисунок 2 – Схемы подключения двигателя постоянного тока
Схема подключения обмоток статора существенно влияет на электрические и тяговые характеристики привода.
Пуск двигателя постоянного тока
Пуск двигателя постоянного тока производят с помощью пусковых реостатов, которые представляют собой активные сопротивления, подключенные к цепи якоря. Выполняют реостатный пуск по двум причинам:
| — при необходимости плавного разгона электродвигателя; |
| — в начальный момент времени, пусковой ток Iп = U / Rя очень большой, что вызывает перегрев обмотки якоря (которая имеет малое сопротивление). |

Рисунок 3 – Реостатный пуск двигателя с 3 ступенями
В начале запуска к цепи ротора подключаются все сопротивления, и по мере увеличения скорости они ступенчато выводятся.
Регулирование скорости вращения
Частота вращения двигателя постоянного тока выражается формулой:
 |
Это выражение так же называется электромеханической характеристикой ДПТ, в которой:
| U – питающее напряжение; |
| Iя – ток в якорной обмотке; |
| Rя – сопротивление якорной цепи; |
| k – конструктивный коэффициент двигателя; |
| Ф – магнитный поток двигателя. |
Формула момента двигателя:
 |
Подставив в формулу электромеханической характеристики, получим:
 |
Таким образом, исходя из приведенных формул, сделаем вывод, что скорость вращения ДПТ можно регулировать, изменяя сопротивление якоря, питающее напряжение и магнитный поток.
Электродвигатели постоянного тока. устройство и работа. виды
Двигатель постоянного тока. Схемы соединения и характеристики ДПТ
Двигатель постоянного тока нашел широкое применение в различных областях деятельности человека. Начиная от использования тягового привода, применяемого в трамваях и троллейбусах, заканчивая приводом прокатных станов и подъемных механизмов, где требуется поддержание высокой точности скорости вращения.
Основные положительные особенности, которые отличают ДПТ от асинхронного двигателя:
| — гибкие пусковые и регулировочные характеристики; |
| — двухзонное регулирование, которое позволяет достигать скорости вращения более 3000 об/мин. |
| — сложность в изготовлении и высокая стоимость; |
| — в процессе работы необходимо постоянное обслуживание, так как коллектор и токосъемные щетки имеют небольшой ресурс работы. |
Двигатель постоянного тока применяют только тогда, когда применение двигателя переменного тока невозможно или крайне нецелесообразно. В среднем, на каждые 70 двигателей переменного тока приходится всего лишь 1 ДПТ.
Конструкция ДПТ
Двигатель постоянного тока состоит из:
| — индуктора (статора); |
| — якоря (ротора); |
| — коллектора; |
| — токосъемных щеток; |
| — конструктивных элементов. |
Якорь и индуктор разделены между собой воздушным зазором. Индуктор представляет из себя станину, которая служит для того, чтобы закрепить основные и добавочные полюса магнитной системы двигателя. На основных полюсах располагаются обмотки возбуждения, а на добавочных – специальные обмотки, которые способствуют улучшению коммутации.
Коллектор подводит постоянный ток к рабочей обмотке, которая уложена в пазы ротора. Коллектор имеет вид цилиндра и состоит из пластин, изолированных друг от друга, он насажен на вал двигателя. Щетки служат для съема тока с коллектора, они крепятся в щеткодержателях для обеспечения правильного положения и надежного нажатия на поверхность коллектора.
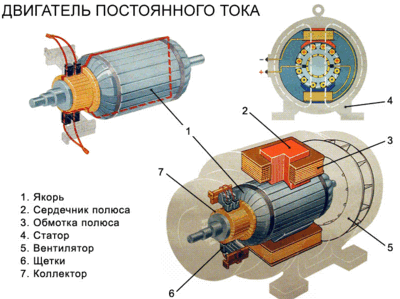
Рисунок 1 – Конструкция двигателя постоянного тока
Двигатели постоянного тока классифицируют по магнитной системе статора:
1) ДПТ с постоянными магнитами;
2) ДПТ с электромагнитами:
| — ДПТ с независимым возбуждением; |
| — ДПТ с последовательным возбуждением; |
| — ДПТ с параллельным возбуждением; |
| — ДПТ со смешанным возбуждением. |

Рисунок 2 – Схемы подключения двигателя постоянного тока
Схема подключения обмоток статора существенно влияет на электрические и тяговые характеристики привода.
Пуск двигателя постоянного тока
Пуск двигателя постоянного тока производят с помощью пусковых реостатов, которые представляют собой активные сопротивления, подключенные к цепи якоря. Выполняют реостатный пуск по двум причинам:
| — при необходимости плавного разгона электродвигателя; |
| — в начальный момент времени, пусковой ток Iп = U / Rя очень большой, что вызывает перегрев обмотки якоря (которая имеет малое сопротивление). |

Рисунок 3 – Реостатный пуск двигателя с 3 ступенями
В начале запуска к цепи ротора подключаются все сопротивления, и по мере увеличения скорости они ступенчато выводятся.
Регулирование скорости вращения
Частота вращения двигателя постоянного тока выражается формулой:
Это выражение так же называется электромеханической характеристикой ДПТ, в которой:
| U – питающее напряжение; |
| Iя – ток в якорной обмотке; |
| Rя – сопротивление якорной цепи; |
| k – конструктивный коэффициент двигателя; |
| Ф – магнитный поток двигателя. |
Формула момента двигателя:
Подставив в формулу электромеханической характеристики,получим:
Таким образом, исходя из приведенных формул, сделаем вывод, что скорость вращения ДПТ можно регулировать, изменяя сопротивление якоря, питающее напряжение и магнитный поток.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Такой тип двигателя обладает превосходными характеристиками, особенно при совершении управления посредством датчиков положения. Если момент сопротивления варьируется или вовсе неизвестен, а также при необходимости достижения более высокого пускового момента используется управление с датчиком. Если же датчик не используется (как правило, в вентиляторах), управление позволяет обойтись без проводной связи.
Особенности управления трёхфазным бесколлекторным двигателем без датчика по положению:
- расположение ротора определяют при помощи дифференциального АЦП (аналого-цифрового преобразователя);
- токовую перегрузку определяют также при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора;
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- рекомендуемыми микроконтроллерами считаются AT90PWM3 и ATmega64;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI.
Особенности управления трёхфазным бесколлекторным двигателем с датчиком по положению на примере датчика Холла:
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- выход каждого из датчиков Холла подключают к соответствующей линии ввода-вывода микроконтроллера, настроенной при изменениях состояния на генерацию прерываний;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI;
- токовую перегрузку определяют при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора.
Устройство электродвигателя
Основные элементы, из которых состоит типичный трехфазный двигатель таковы:
- Корпус, имеющий ножки, которыми он крепится к фундаменту;
- Статор, напоминающий по строению простой трансформатор. Имеет сердечник и обмотку При подаче тока создается вихревое электромагнитное поле.
- Ротор. Основная вращающаяся часть.
- Вал, на который жестко насажен ротор. Передняя часть выходит наружу, имеет шпоночную борозду под шестерни или шкив. На заднюю часть, выходящую за пределы корпуса насаживается крыльчатка для охлаждения и обдува.
- Подшипки, находящиеся в нишах передней и задней крышки.
- Герметичная клеммная коробка.

Классификация МПТ по способу питания обмоток индуктора и якоря
По данному признаку МПТ делятся на 4 вида.
С независимым возбуждением
Обмотки индуктора и якоря не имеют электрического соединения. У генераторов этого типа обмотку возбуждения питает сеть постоянного тока, аккумулятор или специально предназначенный для этого генератор — возбудитель. Мощность последнего — несколько сотых мощности основного генератора.
 Область применения генераторов с независимым возбуждением:
Область применения генераторов с независимым возбуждением:
- системы значительной мощности, где напряжение на обмотке возбуждения существенно отличается от генерируемого;
- системы регулирования скорости вращения двигателей, запитанных от генераторов.
У двигателей с независимым возбуждением запитана и якорная обмотка. В основном это также агрегаты большой мощности.
Независимость обмотки индуктора позволяет удобнее и экономичнее регулировать ток возбуждения. Еще одна особенность таких моторов — постоянство магнитного потока возбуждения при любой нагрузке на валу.
С параллельным возбуждением
Обмотки индуктора и якоря соединены в одну цепь параллельно друг другу. Генераторы этого типа обычно применяются для средних мощностей. При параллельном соединении генерируемое устройством напряжение подается на обмотку возбуждения. При соединении в одну цепь обмоток индуктора и якоря говорят о генераторе с самовозбуждением.
По своим характеристикам они идентичны моторам с независимым возбуждением и обладают следующими особенностями:
- при изменении нагрузки частота вращения практически не трансформируется: замедление составляет не более 8% при переводе от холостого хода к номинальной нагрузке;
- можно с минимальными потерями регулировать частоту вращения, причем в широких пределах — 2-кратно, а у специально сконструированных моторов и 6-кратно.
Индуктор вращающегося двигателя с параллельным возбуждением нельзя отсоединять от цепи якоря, даже если он уже отключен. Это приведет к наведению значительной ЭДС в обмотке возбуждения с последующим выходом мотора из строя. Находящийся рядом персонал может получить травму.
С последовательным возбуждением
Обмотки соединены в цепь последовательно друг другу. Через обмотку возбуждения течет ток якоря. Генераторы этого типа почти не применяются, поскольку процесс самовозбуждения происходит достаточно бурно и устройство не способно обеспечить необходимое большинству потребителей постоянство напряжения. Их используют только в специальных установках.

Схема последовательного возбуждения
Двигатели этого типа широко применяют в качестве тяговых (электровозы, троллейбусы, краны и пр.): по сравнению с аналогами параллельного возбуждения, при нагрузке они дают более высокий момент с одновременным уменьшением скорости вращения. Пусковой момент также высок.
Запуск двигателя с нагрузкой ниже 25% номинальной, а тем более на холостом ходу, недопустим: частота вращения окажется чересчур высокой, и агрегат выйдет из строя.
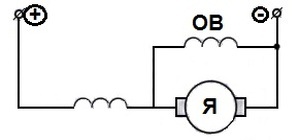
С параллельно-последовательным (смешанным) возбуждением
Существует два вида схемы:
- основная обмотка индуктора включена параллельно с якорной, вспомогательная — последовательно;
- основная обмотка индуктора включена последовательно с якорной, вспомогательная — параллельно.
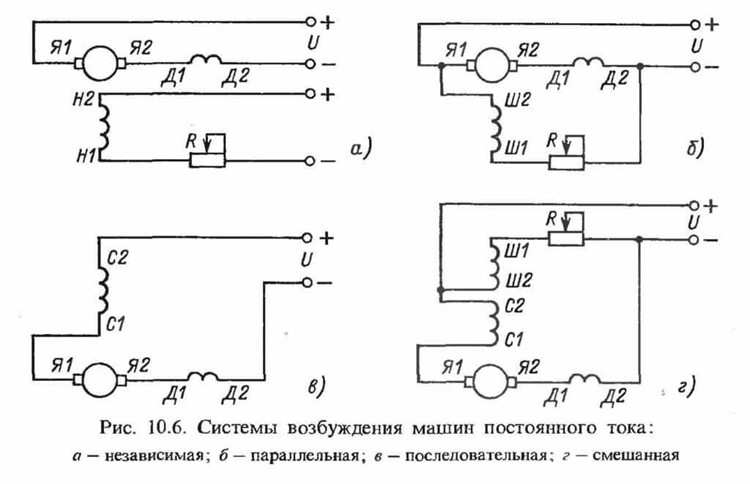
Схемы систем возбуждения МПТ
Подключение параллельной обмотки до последовательной называют «коротким шунтом», за последовательной — «длинным шунтом». Генераторы этого типа применяются крайне редко.
Двигатели сочетают в себе достоинства аналогов с параллельным и последовательным возбуждением: способны работать на холостом ходу и при этом развивают значительное тяговое усилие. Но и они сегодня почти не применяются.
Плюсы – минусы
Технические характеристики асихронных электродвигателей с короткозамкнутым ротором настолько превосходят показатели синхронных, что большинство приводов сделаны на их основе.
Плюсы таких устройств таковы:
- Надежность, простота конструкции, долговечность;
- Отсутствие сложностей в ремонте и обслуживании;
- Переключением 2-х фаз можно заставить вал вращаться в противоположную сторону;
- Применение в качестве генератора.

Недостатки или минусы также имеются:
- При неправильной фазировке, вал может вращаться в ненужную сторону и заклинить прочую механику (шестерни);
- Пусковой ток, превышающий номинальный до пяти раз;
- Скорость разгонки и торможения. На некоторые устройства с большой инерцией нужны движки большей мощности.
- При обрыве фазы, двигатель может сгореть если своевременно не отключить подачу напряжения.

Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным
В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»)
Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Современное применение и перспективы
Существует немало устройств, для которых увеличение времени безотказной работы имеет важнейшее значение. В подобном оборудовании применение БДКП всегда оправданно, несмотря на их сравнительно высокую стоимость. Это могут быть водяные и топливные насосы, турбины охлаждения кондиционеров и двигателей и т. д. Бесщёточные моторы используются во многих моделях электрических транспортных средств
В настоящее время на бесколлекторные двигатели всерьёз обратила внимание автомобильная промышленность
БДКП идеально подходят для малых приводов, работающих в сложных условиях или с высокой точностью: питатели и ленточные конвейеры, промышленных роботы, системы позиционирования. Существуют сферы, в которых бесколлекторные двигатели доминируют безальтернативно: жёсткие диски, насосы, бесшумные вентиляторы, мелкая бытовая техника, CD/DVD приводы. Малый вес и высокая выходная мощность сделали БДКП также и основой для производства современных беспроводных ручных инструментов.
Принцип работы
Работа двигателя заключается в том, что контроллер коммутирует определённое количество обмоток статора таким образом, что вектор магнитных полей ротора и статора ортогональны. При помощи ШИМ (широтно-импульсной модуляции) контроллер совершает управление протекающим через двигатель током и регулирует момент, оказывающий воздействие на ротор. Направление этого действующего момента определяет отметка угла между векторами. При расчётах используются электрические градусы.

В такой ситуации результирующий вектор сдвигается и становится неподвижным по отношению к потоку ротора, что, в свою очередь, создаёт необходимый момент на валу электродвигателя.
Классификация
Все трехфазные электродвигатели можно разбить на две группы:
Синхронные. Вращаются со скоростью постоянного магнитного поля. Для повышения мощности, ротор изготовляется по принципу трансформатора – имеет обмотки и сердечник. Напряжение подается через угольные щетки на кольца коллектора (контакты), закрепленного на валу, а уж потом – на катушки ротора.

Асинхронные, с короткозамкнутым ротором. Вращательный импульс идет от возбуждения катушек статора. Короткозамкнутые витки выполнены в виде беличьего колеса. Ротор вращается со скоростью ниже, чем электромагнитное поле статора. Отсюда и его название.
Принцип преобразования энергии
Принцип работы электродвигателя любого типа заключается в использовании электромагнитной индукции, возникающей внутри устройства после подключения в сеть. Для того чтобы понять, как эта индукция создается и приводит элементы двигателя в движение, следует обратиться к школьному курсу физики, объясняющему поведение проводников в электромагнитном поле.
Итак, если мы погрузим проводник в виде обмотки, по которому движутся электрические заряды, в магнитное поле, он начнет вращаться вокруг своей оси. Это связано с тем, что заряды находятся под влиянием механической силы, изменяющей их положение на перпендикулярной магнитным силовым линиям плоскости. Можно сказать, что эта же сила действует на весь проводник.
Схема, представленная ниже, показывает токопроводящую рамку, находящуюся под напряжением, и два магнитных полюса, придающие ей вращательное движение.
 Картинка кликабельна.
Картинка кликабельна.
Именно эта закономерность взаимодействия магнитного поля и токопроводящего контура с созданием электродвижущей силы лежит в основе функционирования электродвигателей всех типов. Для создания аналогичных условий в конструкцию устройства включают:
- Ротор (обмотка) – подвижная часть машины, закрепленная на сердечнике и подшипниках вращения. Она исполняет роль токопроводящего вращательного контура.
- Статор – неподвижный элемент, создающий магнитное поле, воздействующее на электрические заряды ротора.
- Корпус статора. Оснащен посадочными гнездами с обоймами для подшипников ротора. Ротор размещается внутри статора.
Для представления конструкции электродвигателя можно создать принципиальную схему на основе предыдущей иллюстрации:
После включения данного устройства в сеть, по обмоткам ротора начинает идти ток, который под воздействием магнитного поля, возникающего на статоре, придает ротору вращение, передаваемое на крутящийся вал. Скорость вращения, мощность и другие рабочие показатели зависят от конструкции конкретного двигателя и параметров электрической сети.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
 Трехфазный генератор переменного тока
Трехфазный генератор переменного тока
Бесколлекторный электродвигатель постоянного тока. Общие сведения и устройство прибора

Контроллеры электродвигателей такого типа зачастую питаются благодаря постоянному напряжению, отчего и получили своё название. В англоязычной технической литературе вентильный электродвигатель называют PMSM или BLDC.
Бесколлекторный электродвигатель был создан в первую очередь для оптимизации любого электродвигателя постоянного тока в целом. К исполнительному механизму такого устройства (особенно к высокооборотному микроприводу с точным позиционированием) ставились очень высокие требования.
Это, пожалуй, и обусловило использование таких специфических приборов постоянного тока, бесколлекторные трёхфазные двигатели, также называемые БДПТ. По своей конструкции они практически идентичны синхронным двигателям переменного тока, где вращение магнитного ротора происходит в обычном шихтованном статоре при наличии трёхфазных обмоток, а количество оборотов зависит напряжения и нагрузок статора. Исходя из определённых координат ротора, происходит переключение разных обмоток статора.

обмотки статора выполняют функцию фиксирующего элемента
Если одна из обмоток будет выключена, то будет измеряться и в дальнейшем обрабатываться тот сигнал, который был наведён, однако, такой принцип работы невозможен без профессора обработки сигналов. А вот для реверса или торможения такого электродвигателя мостовая схема не нужна – достаточно будет подачи в обратной последовательности управляющих импульсов на обмотки статора.
В ВД (вентильном двигателе) индуктор в виде постоянного магнита расположен на роторе, а якорная обмотка – на статоре. Исходя из положения ротора, формируется напряжение питания всех обмоток электродвигателя. При использовании в таких конструкциях коллектора, его функцию будет выполнять в вентильном двигателе полупроводниковый коммутатор.
Основное отличие синхронного и вентильного двигателей заключается в самосинхронизации последнего при помощи ДПР, что обусловливает пропорциональную частоту вращения ротора и поля.
Чаще всего бесколлекторный электродвигатель постоянного тока находит применение в следующих сферах:
- морозильное или холодильное оборудование (компрессоры);
- электропривод;
- системы нагрева воздуха, его кондиционирования или вентиляции.
Статор
Это устройство имеет классическую конструкцию и напоминает такой же прибор асинхронной машины. В состав входит сердечник из медной обмотки (уложенной по периметру в пазы), определяющей количество фаз, и корпус. Обычно синусной и косинусной фаз достаточно для вращения и самозапуска, однако, часто вентильный двигатель создают трёхфазным и даже четырёхфазным.
Электродвигатели с обратной электродвижущей силой по типу укладки витков на обмотке статора делятся на два типа:
- синусоидальной формы;
- трапецеидальной формы.
В соответствующих видах двигателя электрический фазный ток меняется также по способу питания синусоидально или трапецеидально.
Ротор

Самыми распространёнными и дешёвыми для изготовления ротора считаются ферритовые магниты, но их недостатком является низкий уровень магнитной индукции, поэтому на замену такому материалу сейчас приходят приборы, созданные из сплавов различных редкоземельных элементов, поскольку могут предоставить высокий уровень магнитной индукции, что, в свою очередь, позволяет уменьшить размер ротора.
Датчик положения ротора обеспечивает обратную связь. По принципу работы устройство делится на такие подвиды:
- индуктивный;
- фотоэлектрический;
- датчик с эффектом Холла.
Последний тип получил наибольшую популярность благодаря своим практически абсолютным безынерционным свойствам и способности избавляться по положению ротора от запаздывания в каналах обратной связи.
Система управления
Система управления состоит из силовых ключей, иногда также из тиристоров или силовых транзисторов, включающих изолированный затвор, ведущих к сбору инвертора тока либо инвертора напряжения. Процесс управления этими ключами реализуется чаще всего путём использования микроконтроллера, требующего для управления двигателем огромного количества вычислительных операций.
Общие технические характеристики электродвигателей постоянного тока П51, П52
Электрические машины охватывают электродвигатели и генераторы. Двигатели используются для работы в электроприводах постоянного тока различных механизмов с питанием, как от полупроводниковых преобразователей, так и от генераторов.
Электродвигатели постоянного тока серии П51, П52 выпускаются со смешанным возбуждением. По требованию заказчика возможно изготовление двигателей постоянного тока с независимым возбуждением, для напряжения 110 В или 220 В.
Условные обозначения двигателей постоянного тока серии П.
П Х1 Х2 Х3 М
П – машина постоянного тока;
Х1 – исполнение по степени защиты и способу охлаждения. Без буквы – брызгозащищенный с самовентиляцией 1-6 габарит. Б – закрытое исполнение с естественным охлаждением 1-4 габарит;
Х2 – габарит электрической машины. 1-1 габарит, 2-2 габарит, 3-3 габарит, 4-4 габарит, 5-5 габарит, 6-6 габарит;
Х3 – условная длина сердечника якоря. 1 – первая длина, 2 – вторая длина;
М – морское исполнение;
По способу монтажа электродвигатели постоянного тока имеют конструктивное исполнение — IM1001, IM2101, IM2111, IM2131, IM3601, IM3631, IM3611.
Двигатели постоянного тока могут быть изготовлены с присоединенным тахогенератором.
Условия эксплуатации электродвигателей постоянного тока П51, П52.
- Двигатели постоянного тока П51, П52 выпускаются для работы при температуре окружающей среды от -40°С до +40°С.
- При температуре окружающей среды 20° ± 5°С % относительная влажность 95°±3°С%.
- Выдерживают — вибрацию, ударные сотрясения, долговременные наклоны оси электродвигателя постоянного тока от 45° в любую сторону и при качке до 45° с периодом качки 7-9 с.
Возбуждение двигателя постоянного тока последовательное, параллельное, смешанное, независимое. Класс нагревостойкости изоляция электродвигателя постоянного тока — Н. Общий уровень вибрации электродвигателей и уровня интенсивности воздушного шума соответствуют всем принятым нормам.
Габаритные и присоединительные размеры двигателей постоянного тока П51, П52, ПБ51, ПБ52
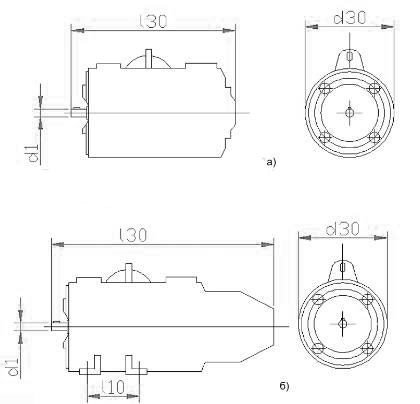
Тип двигателей
постоянного тока
Масса, кг при IM2101, IM2102, IM3601, IM2103, IM2104, IM3611, IM3631







