Схема подключения шагового двигателя флоппи
 Однажды, разбирая коробку с компьютерным хламом, я обнаружил у себя несколько дисководов от от старых 3-х дюймовых гибгих дисков. В свое время я извлек из них шаговые двигатели, а выбросить оставшиеся внутренности не поднялась рука. Сейчас мое внимание привлек двигатель для вращения дисков. Он выполнен самостоятельным блоком на отдельной печатной плате вместе с контроллером привода.
Однажды, разбирая коробку с компьютерным хламом, я обнаружил у себя несколько дисководов от от старых 3-х дюймовых гибгих дисков. В свое время я извлек из них шаговые двигатели, а выбросить оставшиеся внутренности не поднялась рука. Сейчас мое внимание привлек двигатель для вращения дисков. Он выполнен самостоятельным блоком на отдельной печатной плате вместе с контроллером привода.
Задача состояла в том, как его запустить. Поиск решения в сети Internet по запуску такого двигателя не дал какого-либо положительного результата. Было множество статей по использованию шаговых двигателей позиционирующих магнитную головку и практически ничего по запуску «блина» — двигателя вращения диска. Единственная обнаруженная статья была на английском языке, но там описывался очень древний и конкретный дисковод. В общем пришлось искать способ запуска самостоятельно.
С чего я начал. К плате управления подходит шлейф из 4-5 цветных проводов в зависимости от типа дисковода. Два из них подают питание 12V (это было не трудно проследить), и как правило имеют цвета черный(общий) и красный(+). Оставшиеся провода, как я предположил, должны управлять пуском двигателя и скорее всего имеют ТТЛ уровни.
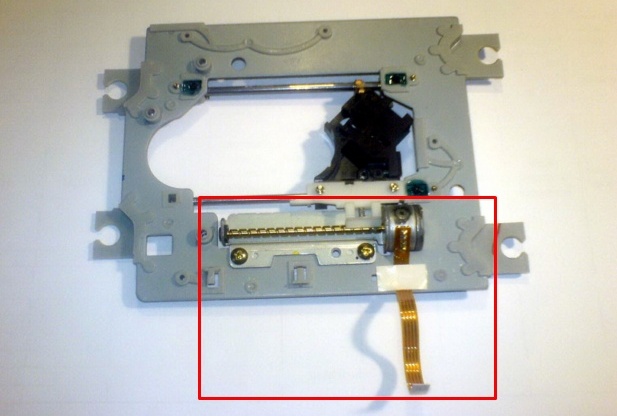
На плате я также обнаружил два фотоэлемента: один на краю платы — он определяет, что диск вставлен в приемник; второй фотоэлемент стоит ближе к центру двигателя — он позиционирует начальное положение диска в котором имеется соответсвующее отверстие. Нас интересует первый (удаленный) фотоэлемент, так как при вставленном диске мотор уже начинает вращаться (в подключенном к компьютеру дисководу).
Фотография контроллера с мотором от дисковода фирмы TEAC приведена на рисунке 1.
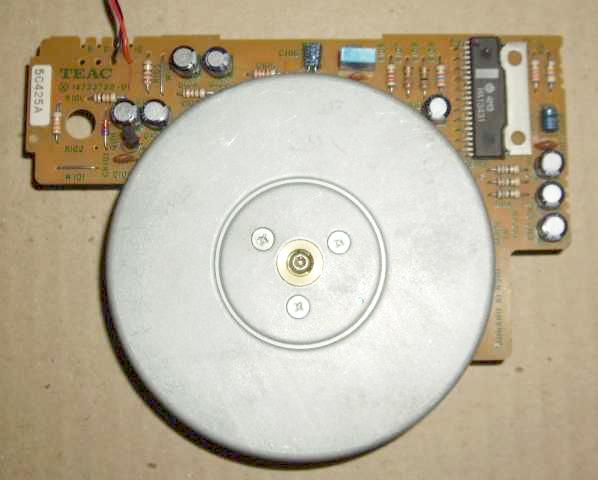
Puc.1
Далее, проследив на плате цепь от фотоэлемента, я установил, что она через транзистор поступает на вход управления микросхемы H13431 — контроллер двигателя (описание этой микросхемы нашел только на японском языке). На тот же транзистор подключен через диод один из проводов входного шлейфа.
Далее — дело техники. Подал на плату питание 12 вольт. Через резистор номиналом 3,3 ком вычисленный контак соединил с плюсом питания. ВСЕ. Двигатель начал вращаться!
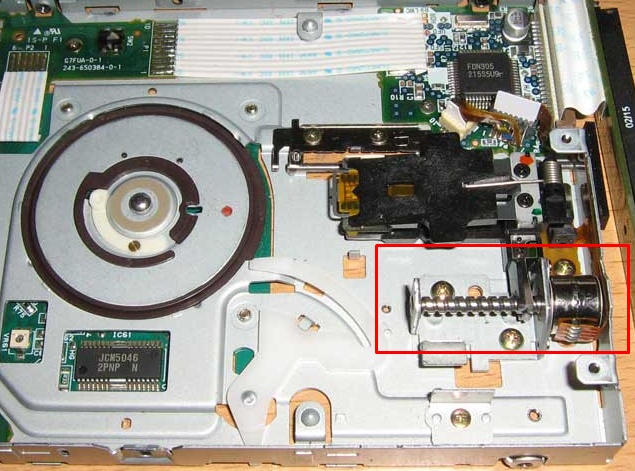
Фрагмент платы с установленныи резистором показан на рисунке 2. Крайний левый контакт не задействован (видимо какой-то выходной сигнал). Следы пайки на плате — моя оплошность: подал на входной контакт непосредственно напряжение питания 12В и сжег транзистор, далее действовал осторожнее — через резистор номиналом 3,3 ком.
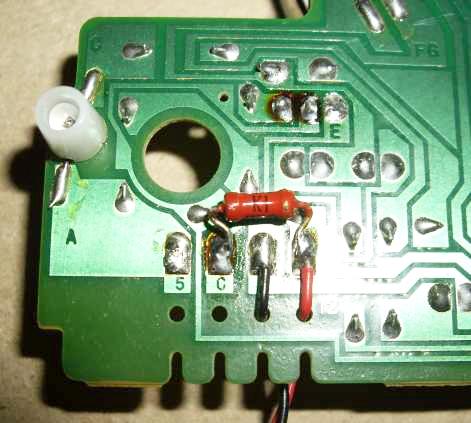
Puc.2
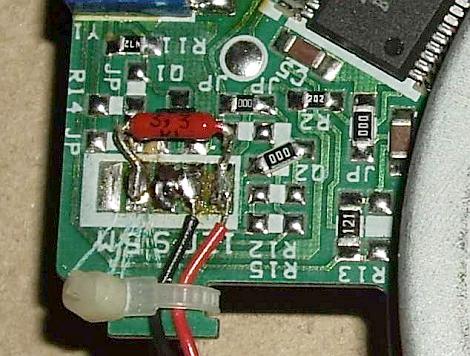
На другом дисководе (рис.3) с названием Sankyo и микросхемой контроллера M51784 пошел таким же путем (описание этой микросхемы есть на сайте www.datasheetcatalog.com). Нашел входной контакт на плате который выходит через резистор на управляющий транзистор и фотоэлемент. Также через резистор подал на него положительный потенциал. И. тишина. Попробовал поочередно позамыкать на «землю» оставшиеся два входных контакта. Заработало. Что это за контакт я не стал выяснять.

Puc.3
Увеличенный фрагмент второй доработанной платы приведен на рисунке 4. «Земляной» контакт и контакт от него слева запаяны вместе. Крайний левый контакт остался свободным.
Puc.4
Таким образом порядок подключения неизвестного дисковода достаточно прост:
1. Находим провода питания (обычно красный+ и черный-).
2. Пытаемся найти цепь управляющего транзистора и фотоэлемента (примерная схема на рис.5).
3. Если двигатель не вращается оставшиееся контакты замыкаем на «землю» (или подаем на них положительный потенциал через ограничительный резистор в несколько ком).
Puc.5
Дальнейшие эксперимены с двигателем показали, что он работоспособен в диапазоне питающих напряжений от 7 до 12 вольт. При этом скорость вращения его очень стабильна, так как задается кварцевым или пъезокерамическим резонатором. Кстати можно попытаться поставить резонатор на другую частоту тем самым изменив скорость вращения. На моих платах резонатор выполнен в виде пластмассового прямоугольника синего цвета — его легко найти.
Применение данного двигателя оставляю на вашу фантазию. Желаю удачи!
Ардуино и шаговый двигатель: основы, схемы, подключение и управление
Шаговые двигатели используют для управления положением чего-либо, или для вращения рабочего узла с заданной скорости и на заданный угол. Такие особенности сделали возможным его применение в робототехнике, станках с числовым программным управлением (ЧПУ), и других системах автоматизации. В этой статье мы рассмотрим ряд вопросов связанных с устройством шаговых двигателей и способами их управления с помощью микроконтроллера Arduino.
Шаговый двигатель отличия от обычного
Все используемые на практике электродвигатели работают за счет электродинамических явлений и процессов происходящих в магнитных полях роторов и статоров. Как мы уже упомянули, любой двигатель состоит как минимум из двух частей – подвижной (ротор) и неподвижной (статор). Для его вращения нужно чтобы и магнитное поле тоже вращалось. Поле ротора вращается вслед за полем статора.
В принципе, таких базовых сведений достаточно для понимания общей картины работы электрических двигателей. Однако на самом деле промышленность производит различные варианты электродвигателя, среди которых:
1. Асинхронный двигатель с короткозамкнутым или с фазным ротором.
2. Синхронный двигатель с обмотками возбуждения или с постоянными магнитами.
3. Двигатель постоянного тока.
4. Универсальный коллекторный двигатель (работает и на постоянном токе и на переменном, ведь обмотки ротора сами подключаются и отключаются от контактов источника питания за счет конструкции ламелей и якоря).
5. Бесщеточные двигатели постоянного тока (BLDC).
7. Шаговые двигатели.
Последние два вида несут особую ценность, благодаря возможности их, в определенной степени, точного позиционирования в пространстве. Давайте подробнее рассмотрим конструкцию шагового двигателя.
Определение
Шаговым двигателем называется бесщеточный электродвигатель синхронного типа. На статоре расположено определенное число обмоток, подключение которых вызывает поворот ротора на определенный угол, зависящий от числа шагов. Другими словами ток в обмотке статора вызывает поворот вала на дискретный угол.
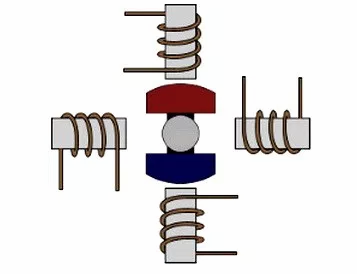
При равномерной и последовательной смене полярностей напряжения на обмотках и переключении запитанных обмоток происходит вращение шагового двигателя, подобно обычному электродвигателю, хотя на самом деле просто происходит регулярный поворот на фиксированный угол.
Шаговый двигатель иногда называют двигателем с конечным количеством положений ротора. Звучит не совсем понятно, давайте разберемся. Представим обычный двигатель – положение его ротора никак не фиксируется, то есть он просто вращается пока подключено питание, а когда оно отключается, то останавливается через какое-то время, зависящее от его инерции. Положений ротора может быть сколько угодно много, а отличаться они могут на мельчайшие доли градуса.
В шаговом двигателе подключение обмотки или нескольких обмоток вызывает «примагничивание» ротора по отношению к этим обмоткам. Внешне это выглядит именно как поворот вала на определенный угол (шаг). Так как количество шагов является одной из важных характеристик этого типа электропривода, то и количество положений ротора равно количеству шагов. Новичкам сложно понять, как это может быть, и как он в таком случае вращается – на самом деле все достаточно просто, мы это покажем на иллюстрациях и описаниях ниже.
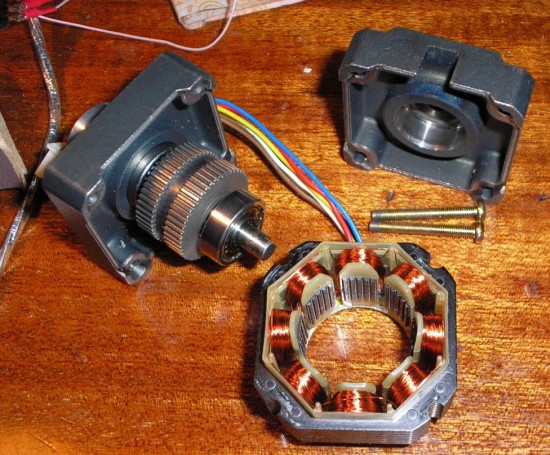
Конструкция
На статоре электродвигателя закреплены обмотки возбуждения. Его ротор выполняется из магнитомягких или магнитотвердых материалов. От материала ротора зависит крутящий момент и фиксация вала при обесточенных обмотках. Эти параметры могут быть критичными.
Поэтому выделяют магнитотвердые роторы (они же на постоянных магнитах) и магнитомягкие (реактивные) роторы, кроме них есть и гибридные роторы.
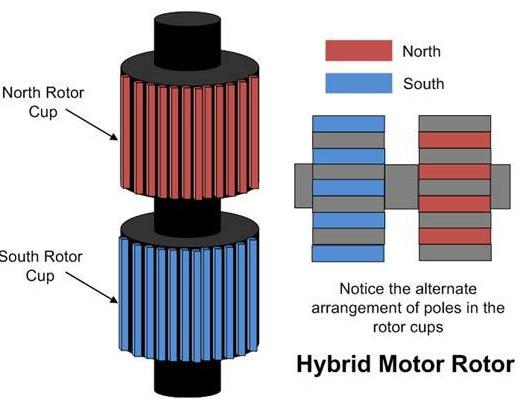
Гибридный ротор делают зубчатым, количество зубцов соответствует количеству шагов. Зубцы расположены вдоль оси ротора. При этом такой ротор разделен на две части поперек. Между ними установлен постоянный магнит, таким образом, каждая из половин ротора является полюсом магнита. Также следует сказать, о том, что половины ротора повернуты на половину шага зубцов друг относительно друга.
Как уже было сказано, такой двигатель является синхронным, так и процесс его вращения заключается в создании вращающего поля ротора, за которым стремится магнитный ротор, а это реализовывается за счет переключения контроллером обмоток поочередно.
Виды шаговых двигателей ШД по конструкции обмоток делят на три основных группы по схеме подключения обмоток:
3. С четырьмя обмотками.

Биполярные электродвигателя в большинстве своем имеют 4 контакта – это выводы с двух обмоток. Внутри двигателя они по большому счету никак не соединены между собой. Основной проблемой является то, что нужно обеспечить переключение полярности питания, это значит, что драйвер и сам процесс управления усложнится.
Униполярные напоминают соединение обмоток по схеме звезды. Другими словами, у вас есть 5 выводов – 4 из них это концы обмоток, а 1 – точка соединения всех обмоток.
Для управления таким двигателем нужно просто подавать поочередно питание на каждый из концов обмотки (или их пару, в зависимости от выбранного режима вращения), таким образом будет запитываться каждый раз половинка обмотки. Может работать в биполярном режиме, если запитывать полностью всю обмотку минуя отвод от её середины.
Двигатели с 4 обмотками имеют преимущество в том, что вы можете подключить обмотки любым удобным для вас образом и получить как биполярный, так и униполярный двигатель.
Режимы управления
Различают 4 основных режима управления шаговым двигателем:
1. Волновое управление.
Волновым управлением называют управление одной обмоткой. Т.е. одновременно ток течет через одну из обмоток, отсюда две отличительных черты – низкое энергопотребление (это хорошо) и низкий крутящий момент (это плохо).
В данном случае этот двигатель делает 4 шага за один оборот. Реальные же двигатели делают десятки шагов за один оборот, это достигается бОльшим количеством чередований магнитных полюсов.
Полношаговое управление является наиболее часто используемым. Здесь напряжение подается не на одну обмотку, а на две сразу. Если обмотки соединены параллельно – то ток удваивается, а если последовательно, то удваивается напряжение питания соответственно. С одной стороны в таком методе управления двигатель потребляет больше энергии, с другой – крутящий момент 100%, в отличие от предыдущего.
Полушаговое управление интересно тем, что становится возможным более точное позиционирование вала двигателя, благодаря к тому, что к целым шагам добавляются еще и половинки это достигается совмещение предыдущих двух режимов работы, а обмотки чередуются, то включаясь попарно, то по одной.
Стоит учесть, что момент на валу плавает от 50 до 100% в зависимости от того 1 или 2 две обмотки задействованы в данный момент.
Еще более точным является микрошаговый. Он похож на предыдущий, но отличается тем, что питание на обмотки подаётся не полной величины, а постепенно изменяющейся. Таким образом, изменяется степень воздействия на ротор каждой из обмоток и плавно изменяется угол поворота вала в промежуточных шагам положениях.

Где взять шаговый двигатель
Купить шаговый двигатель вы успеете всегда, но настоящие радиолюбители, самодельщики и электронщики славятся тем, что могут из мусора сделать что-то полезное. Наверняка, у вас дома найдется хотя бы один шаговый двигатель. Давайте разберемся, где нужно искать, чтобы найти такой двигатель.
1. Принтера. Шаговые двигатели могут стоять на вращении вала подачи бумаги (но может быть и двигатель постоянного тока с датчиком перемещения).
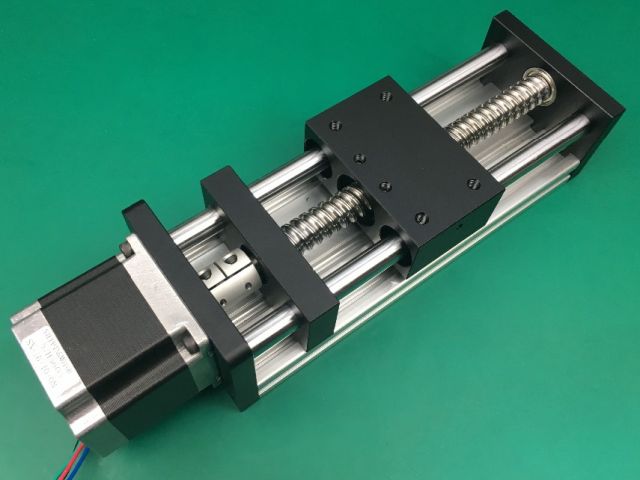
2. Сканеры и МФУ. В сканерах часто устанавливают шаговый двигатель и механическую часть, направляющую вдоль которой ходит каретка, эти детали также могут стать полезны при разработке самодельного ЧПУ станка.
3. CD и DVD приводы. В них также можно достать и штанги и винтовые валы для самоделок и различных ЧПУ.
4. Floppy-дисководы. В дискетниках также есть шаговые двигатели, особо ценятся флопики формата 5.25”.
Драйвер для шагового двигателя
Для управления шаговыми двигателями используют специализированные микросхемы-драйвера. В большинстве своем это H-мост из транзисторов. Благодаря такому включению появляется возможность включать на обмотку напряжение нужной полярности. Эти микросхемы подходят и для управления двигателями постоянного тока с поддержкой изменения направления вращения.
В принципе очень маленькие двигателя можно запустить и прямо от пинов микроконтроллера, но обычно они выдают до 20-40 мА, чего в большинстве случае недостаточно. Поэтому приведем несколько примеров драйверов для шаговых двигателей:
1. Платы на базе L293D. Их множество, одна из таких продается под отечественной маркой «Амперка» под название Troyka Stepper, пример его использования в реальном проекте приведен на видео ниже. Преимущество конкретно этой платы в том, что на ней расположены микросхемы логики которые позволяют сократить количество используемых для управления пинов.
Сама по себе микросхема работает под напряжение 4.5-36В и выдает ток до 600мА-1А в зависимости от корпуса ИМС.
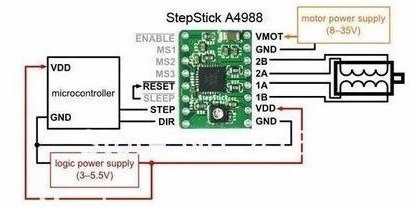
2. Драйвер на базе A4988. Питается напряжением до 35В, выдерживает ток до 1А без радиатора, а с радиатором до 2А. Может управлять двигателем, как целыми шагами, так и частями – от 1/16 шага до 1 шага, всего 5 вариантов. Содержит два H-моста. С помощью подстроечного резистора (видно на правом фото) можно задавать выходной ток.
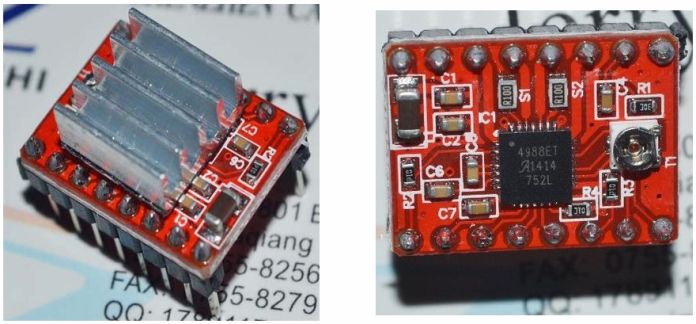
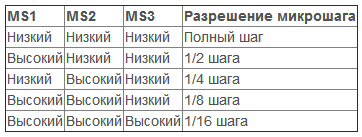
Размер шага задается сигналами на входах MS1, MS2, MS3.
Вот схема его подключения, каждый импульс на входе STEP задает поворот двигателя на 1 шаг или на микрошаг.
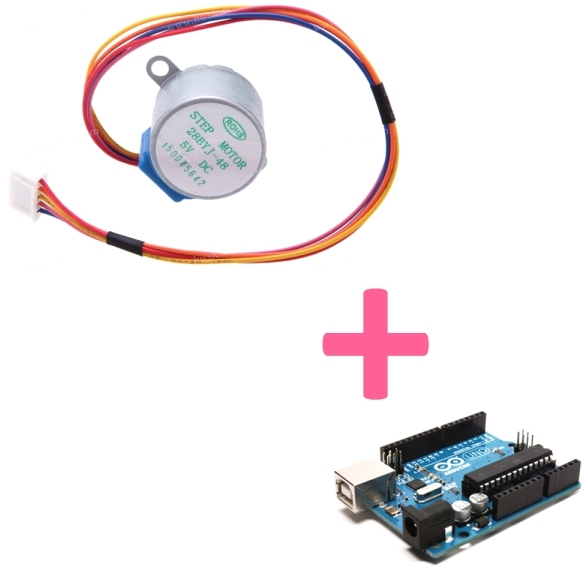
3. Драйвер на базе ULN2003 работает с двигателями на 5 и на 12В и выдаёт ток до 500 мА. На большинстве плат расположены 4 светодиода индицирующих работу каждого из каналов.
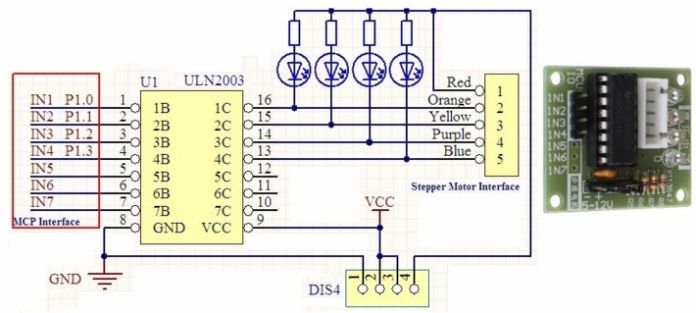
Также на плате вы можете видеть клеммную колодку для подключения двигателей, кстати, многие из них продаются именно с таким разъёмом. Примером такого двигателя является 5В модель – 28BYJ-48.
И это не все варианты драйверов для шаговых двигателей, на самом деле их еще больше.
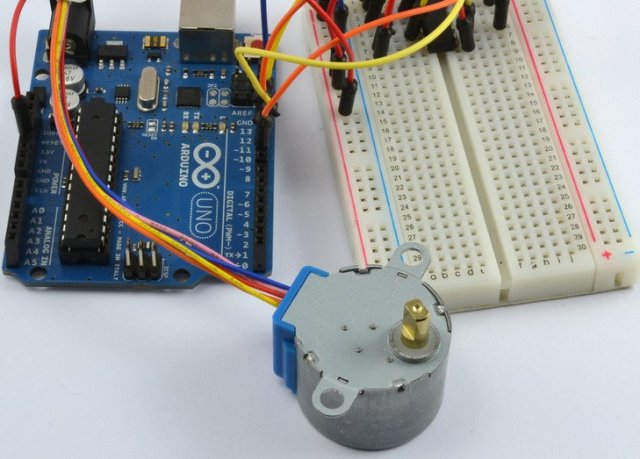
Подключение к Arduino драйвера и шагового двигателя
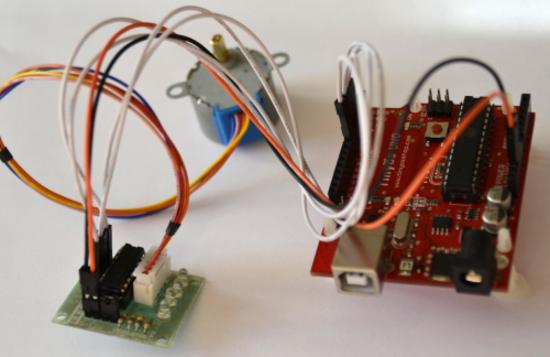
В большинстве случаев нужно использовать микроконтроллер в паре с драйвером для шагового двигателя. Давайте рассмотрим схему подключения и примеры программного кода. Рассмотрим подключение на базе последнего приведенного драйвера – ULN2003 к плате Arduino. И так у него есть 4 входа, они подписаны, как IN1, IN2 и т.д. Их нужно соединить с цифровыми пинам платы ардуино, а к драйверу подсоединить моторчик как показано на рисунке ниже.
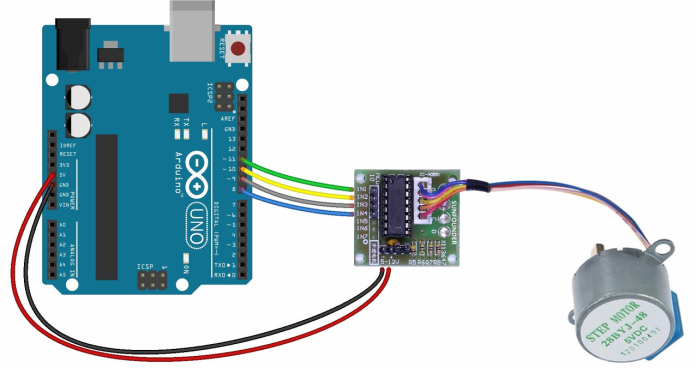
Далее в зависимости от способа управления вы должны подавать на входы 1 или 0 с этих пинов включая 1 или 2 обмотки в нужно последовательности. Код программы полношагового управления выглядит примерно так:







