Схемы электродвигателей постоянного тока и их характеристики
 Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
1. с независимым возбуждением : обмотка возбуждения питается от постороннего источника постоянного тока (возбудителя или выпрямителя) ,
2. с параллельным возбуждением : обмотка возбуждения подключена параллельно обмотке якоря,
3. с последовательным возбуждением : обмотка возбуждения включена последовательно с обмоткой якоря,
4. со смешанным возбуждением : он имеет две обмотки возбуждения, одна подключена параллельно обмотке якоря, а другая — последовательно с ней.
Все эти электродвигатели имеют одинаковое устройство и отличаются лишь выполнением обмотки возбуждения. Обмотки возбуждения указанных электродвигателей выполняют так же, как у соответствующих генераторов .
Электродвигатель постоянного тока с независимым возбуждением
В этом электродвигателе (рис. 1, а) обмотка якоря подключена к основному источнику постоянного тока (сети постоянного тока, генератору или выпрямителю) с напряжением U, а обмотка возбуждения — к вспомогательному источнику в напряжением UB. В цепь обмотки возбуждения включен регулировочный реостат Rрв, а в цепь обмотки якоря — пусковой реостат Rn.
Регулировочный реостат служит для регулирования частоты вращения якоря двигателя, а пусковой — для ограничения тока в обмотке якоря при пуске. Характерной особенностью электродвигателя является то, что его ток возбуждения Iв не зависит от тока Iя в обмотке якоря (тока нагрузки). Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя Ф не зависит от нагрузки. Зависимости электромагнитного момента М и частоты вращения n от тока Iя будут линейными (рис. 2, а). Следовательно, линейной будет и механическая характеристика двигателя — зависимость п (М) (рис. 2, б).
При отсутствии в цепи якоря реостата с сопротивлением Rn скоростная и механическая характеристики будут жесткими, т. е. с малым углом наклона к горизонтальной оси, так как падение напряжения IяΣRя в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3—5 % от Uном. Эти характеристики (прямые 1 на рис. 2, а и б) называются естественными. При включении в цепь якоря реостата с сопротивлением Rn угол наклона этих характеристик возрастает, вследствие чего можно получить семейство реостатных характеристик 2, 3 и 4, соответствующих различным значениям Rn1, Rn2 и Rn3.
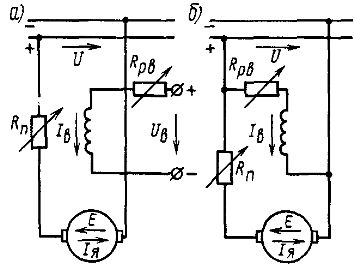
Рис. 1. Принципиальные схемы электродвигателей постоянного тока с независимым (а) и параллельным (б) возбуждением
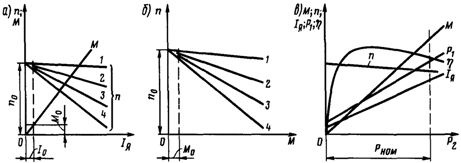
Рис. 2. Характеристики электродвигателей постоянного тока с независимым и параллельным возбуждением : а — скоростные и моментная, б — механические, в — рабочие Чем больше сопротивление Rn, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Регулировочный реостат Rpв позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. При этом будет изменяться и частота вращения n.
В цепь обмотки возбуждения никаких выключателей и предохранителей не устанавливают, так как при разрыве этой цепи резко уменьшается магнитный поток электродвигателя (в нем остается лишь поток от остаточного магнетизма) и возникает аварийный режим. Если электродвигатель работает при холостом ходе или небольшой нагрузке на валу, то частота вращения резко возрастает (двигатель идет вразнос). При этом сильно увеличивается ток в обмотке якоря Iя и может возникнуть круговой огонь. Во избежание этого защита должна отключить электродвигатель от источника питания.
Резкое увеличение частоты вращения при обрыве цепи обмотки возбуждения объясняется тем, что в этом случае резко уменьшаются магнитный поток Ф (до значения потока Фост от остаточного магнетизма) и э. д. с. Е и возрастает ток Iя. А так как приложенное напряжение U остается неизменным, то частота вращения n будет увеличиваться до тех пор, пока э. д. с. Е не достигнет значения, приблизительно равного U (что необходимо для равновесного состояния электрической цепи якоря, при котором E= U — IяΣRя.
При нагрузке на валу, близкой к номинальной, электродвигатель в случае разрыва цепи возбуждения остановится, так как электромагнитный момент, который может развить двигатель при значительном уменьшении магнитного потока, уменьшается и станет меньше нагрузочного момента на валу. В этом случае так же резко увеличивается ток Iя, и машина должна быть отключена от источника питания.
Следует отметить, что частота вращения n0 соответствует идеальному холостому ходу, когда двигатель не потребляет из сети электрической энергии и его электромагнитный момент равен нулю. В реальных условиях в режиме холостого хода двигатель потребляет из сети ток холостого хода I0, необходимый для компенсации внутренних потерь мощности, и развивает некоторый момент M0, требуемый для преодоления сил трения в машине. Поэтому в действительности частота вращения при холостом ходе меньше n0.
Зависимость частоты вращения n и электромагнитного момента М от мощности Р2 (рис. 2, в) на валу двигателя, как следует из рассмотренных соотношений, является линейной. Зависимости тока обмотки якоря Iя и мощности Р1 от Р2 также практически линейны. Ток Iя и мощность Р1 при Р2 = 0 представляют собой ток холостого хода I0 и мощность Р0, потребляемую при холостом ходе. Кривая к. п. д. имеет характер, общий для всех электрических машин.
Электродвигатель постоянного тока с параллельным возбуждением
В этом электродвигателе (см. рис. 1, б) обмотки возбуждения и якоря питаются от одного и того же источника электрической энергии с напряжением U. В цепь обмотки возбуждения включен регулировочный реостат Rpв, а в цепь обмотки якоря — пусковой реостат Rп.
В рассматриваемом электродвигателе имеет место, по существу, раздельное питание цепей обмоток якоря и возбуждения, вследствие чего ток возбуждения Iв не зависит от тока обмотки якоря Iв. Поэтому электродвигатель с параллельным возбуждением будет иметь такие же характеристики, как и двигатель с независимым возбуждением. Однако двигатель с параллельным возбуждением работает нормально только при питании от источника постоянного тока с неизменным напряжением.
При питании электродвигателя от источника с изменяющимся напряжением (генератор или управляемый выпрямитель) уменьшение питающего напряжения U вызывает соответствующее уменьшение тока возбуждения Iв и магнитного потока Ф, что приводит к увеличению тока обмотки якоря Iя. Это ограничивает возможность регулирования частоты вращения якоря путем изменения питающего напряжения U. Поэтому электродвигатели, предназначенные для питания от генератора или управляемого выпрямителя, должны иметь независимое возбуждение.
Электродвигатель постоянного тока с последовательным возбуждением
Для ограничения тока при пуске в цепь обмотки якоря включен пусковой реостат Rп (рис. 3, а), а для регулирования частоты вращения параллельно обмотке возбуждения может быть включен регулировочный реостат Rрв.
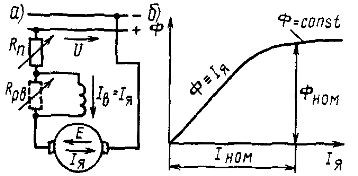
Рис. 3. Принципиальная схема электродвигателя постоянного тока с последовательным возбуждением (а) и зависимость его магнитного потока Ф от тока Iя в обмотке якоря (б)
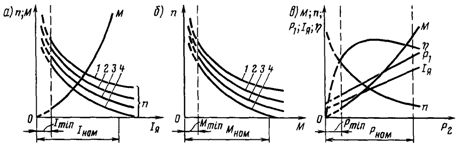
Рис. 4. Характеристики электродвигателя постоянного тока с последовательным возбуждением: а — скоростные и моментная, б — механические, в — рабочие.
Характерной особенностью этого электродвигателя является то, что его ток возбуждения Iв равен или пропорционален (при включении реостата Rpв) току обмотки якоря Iя, поэтому магнитный поток Ф зависит от нагрузки двигателя (рис. 3, б).
При токе обмотки якоря Iя, меньшем (0,8—0,9) номинального тока Iном магнитная система машины не насыщена и можно считать, что магнитный поток Ф изменяется прямо пропорционально току Iя. Поэтому скоростная характеристика электродвигателя будет мягкая — с увеличением тока Iя частота вращения n будет резко уменьшаться (рис. 4, а). Уменьшение частоты вращения n, происходит из-за увеличения падения напряжения IяΣRя. во внутреннем сопротивлении Rя. цепи обмотки якоря, а также из-за увеличения магнитного потока Ф.
Электромагнитный момент М при увеличении тока Iя будет резко возрастать, так как в этом случае увеличивается и магнитный поток Ф, т. е. момент М будет пропорционален току Iя. Поэтому при токе Iя, меньшем (0,8 Н- 0,9) Iном, скоростная характеристика имеет форму гиперболы, а моментная — параболы.
При токах Iя > Iном зависимости М и п от Iя линейны, так как в этом режиме магнитная цепь будет насыщена и магнитный поток Ф при изменении тока Iя меняться не будет.
Механическая характеристика, т. е. зависимость n от М (рис. 4, б), может быть построена на основании зависимостей n и М от Iя. Кроме естественной характеристики 1, можно путем включения в цепь обмотки якоря реостата с сопротивлением Rп получить семейство реостатных характеристик 2, 3 и 4. Эти характеристики соответствуют различным значениям Rn1, Rn2 и Rn3, при этом чем больше Rn, тем ниже располагается характеристика.
Механическая характеристика рассматриваемого двигателя мягкая и имеет гиперболический характер. При малых нагрузках магнитный поток Ф сильно уменьшается, частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.).
Обычно минимально допустимая нагрузка для двигателей большой и средней мощности составляет (0,2 …. 0,25) Iном. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой), применение ременной передачи или фрикционной муфты недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют, особенно там, где имеют место изменения нагрузочного момента в широких пределах и тяжелые условия пуска: во всех тяговых приводах (электровозы, тепловозы, электропоезда, электрокары, электропогрузчики и пр.), а также в приводах грузоподъемных механизмов (краны, лифты и пр.).
Объясняется это тем, что при мягкой характеристике увеличение нагрузочного момента приводит к меньшему возрастанию тока и потребляемой мощности, чем у двигателей с независимым и параллельным возбуждением, поэтому двигатели с последовательным возбуждением лучше переносят перегрузки. Кроме того, эти двигатели имеют большой пусковой момент, чем двигатели с параллельным и независимым возбуждением, так как при увеличении тока обмотки якоря при пуске соответственно увеличивается и магнитный поток.
Если принять, например, что кратковременный пусковой ток может в 2 раза превышать номинальный рабочий ток машины, и пренебречь влиянием насыщения, реакцией якоря и падением напряжения в цепи его обмотки, то в двигателе с последовательным возбуждением пусковой момент будет в 4 раза больше номинального (в 2 раза увеличиваются и ток, и магнитный поток), а в двигателях с независимым и параллельным возбуждением — только в 2 раза больше.
В действительности из-за насыщения магнитной цепи магнитный поток не увеличивается пропорционально току, но все же пусковой момент двигателя с последовательным возбуждением при прочих равных условиях будет значительно больше пускового момента такого же двигателя с независимым или параллельным возбуждением.
Зависимости n и М от мощности Р2 на валу электродвигателя (рис. 4, в), как следует из рассмотренных выше положений, являются нелинейными, зависимости P1, Iя и η от Р2 имеют такую же форму, как и у двигателей с параллельным возбуждением.
Электродвигатель постоянного тока со смешанным возбуждением
В этом электродвигателе (рис. 5, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной (или независимой) и последовательной, по которым проходят токи возбуждения Iв1 и Iв2 = Iя

где Фпосл — магнитный поток последовательной обмотки, зависящий от тока Iя, Фпар — магнитный поток параллельной обмотки, который не зависит от нагрузки (определяется током возбуждения Iв1).
Механическая характеристика электродвигателя со смешанным возбуждением (рис. 5, б) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения магнитодвижущих сил параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (кривая 3 при малой м. д. с. последовательной обмотки) или к характеристике 2 (кривая 4 при малой м. д. с. параллельной обмотки).
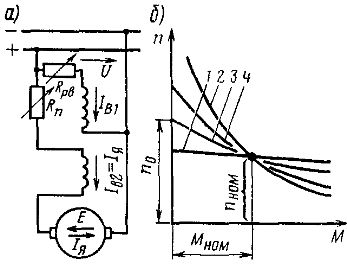
Рис. 5. Принципиальная схема электродвигателя со смешанным возбуждением (а) и его механические характеристики (б)
Достоинством двигателя постоянного тока со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, когда Фпосл=0. В этом режиме частота вращения его якоря определяется магнитным потоком Фпар и имеет ограниченное значение (двигатель не идет вразнос).
Виды возбуждения и схемы включения двигателей постоянного тока.
Двигатели постоянного тока в зависимости от способов их возбуждения, как уже отмечалось, делятся на двигатели с независимым, параллельным (шунтовым), последовательным (сериесным) и смешанным (компаундным) возбуждением.
Двигатели независимого возбуждения, рис.8,а, требуют два источника питания. Один из них необходим для питания обмотки якоря (выводы Я1 и Я2 ), а другой — для создания тока в обмотке возбуждения (выводы обмотки Ш1 и Ш2). Дополнительное сопротивление Rд в цепи обмотки якоря необходимо для уменьшения пускового тока двигателя в момент его включения.
С независимым возбуждением выполняются в основном мощные электрические двигатели с целью более удобного и экономичного регулирования тока возбуждения. Сечение провода обмотки возбуждения определяется в зависимости от напряжения ее источника питания. Особенностью этих машин является независимость тока возбуждения, а соответственно и основного магнитного потока, от нагрузки на валу двигателя.
Двигатели с независимым возбуждением по своим характеристикам практически совпадают с двигателями параллельного возбуждения.
Двигатели параллельного возбуждения включаются в соответствии со схемой, показанной на рис.8,6. Зажимы Я1 и Я2относятся к обмотке якоря, а зажимы Ш1 иШ2 — к обмотке возбуждения (к шунтовой обмотке). Переменные сопротивления Rд и Rвпредназначены соответственно для изменения тока в обмотке якоря и в обмотке возбуждения. Обмотка возбуждения этого двигателя выполняется из большого количества витков медного провода сравнительно малого сечения и имеет значительное сопротивление. Это позволяет подключать ее на полное напряжение сети, указанное в паспортных данных.
Особенностью двигателей этого типа является то, что при их работе запрещается отсоединять обмотку возбуждения от якорной цепи. В противном случае при размыкании обмотки возбуждения в ней появится недопустимое значение ЭДС, которое может привести к выходу из строя двигателя и к поражению обслуживающего персонала. По той же причине нельзя размыкать обмотку возбуждения и при выключении двигателя, когда его вращение еще не прекратилось. •
С увеличением частоты вращения его следует уменьшать, а при достижении установившейся частоты вращения — вывести
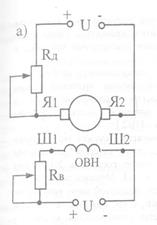
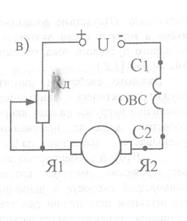
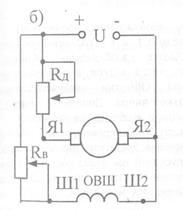
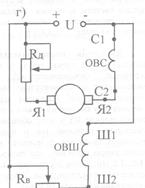
Рис. 8. Виды возбуждения машин постоянного тока,
а — независимого возбуждения , б — параллельного возбуждения,
в — последовательного возбуждения, г — смешанного возбуждения.
ОВШ — обмотка возбуждения шунтовая, ОВС — обмотка возбуждения
сериесная,’ ОВН — обмотка независимого возбуждения, Rд —
Долнительное сопротивление в цепи обмотки якоря, Rв- Дополнительное сопротивление в цепи обмотки возбуждения.
полностью. Отсутствие дополнительного сопротивления в обмотке якоря в момент пуска двигателя может привести к появлению большого пускового тока, превышающего номинальный ток якоря в 10. 40 раз [1,2].
Важным свойством двигателя параллельного возбуждения служит’ практически постоянная его частота вращения при изменении нагрузки на валу якоря. Так при изменении нагрузки от холостого хода до номинального значения частота вращения уменьшается всего лишь на (2.. 8)% [1,12].
Второй особенностью этих двигателей служит экономичное регулирование частоты вращения, при котором отношение наибольшей скорости к наименьшей может составлять 2:1, а при специальном исполнении двигателя — 6:1. Минимальная частота вращения ограничивается насыщением магнитной цепи, которое не позволяет уже увеличивать магнитный поток машины, а верхний предел частоты вращения определяется устойчивостью машины — при значительном ослаблении магнитного потока двигатель может пойти «вразнос» [1,3,4,6].
Двигатели последовательного возбуждения (сериесные) включаются по схеме, рис.8, в. Выводы С1 и С2 соответствуют сериесной (последовательной) обмотке возбуждения. Она выполняется из сравнительно малого числа витков в основном медного провода большого сечения. Обмотка возбуждения соединяется последовательно с обмоткой якоря. Дополнительное сопротивление Rд в цепи обмоток якоря и возбуждения позволяет уменьшить пусковой ток и производить регулирование частоты вращения двигателя. В момент включения двигателя оно должно иметь такую величину, при которой пусковой ток будет составлять (1,5. 2,5)Iн. После достижения двигателем установившейся частоты вращения дополнительное сопротивление Rд выводится, то есть устанавливается равным нулю.
Эти двигатели при пуске развивают большие пусковые моменты вращения и должны запускаться при нагрузке не менее 25% ее номинального значения. Включение двигателя при меньшей мощности на его валу и тем более в режиме холостого хода не допускается. В противном случае двигатель может развить недопустимо большие обороты, что вызовет выход его из строя [1,6,12 ]. Двигатели этого типа широко применяются в транспортных и подъемных механизмах, в которых необходимо изменять частоту врашения в широких пределах.
Двигатели смешанного возбуждения (компаундные), рис.8, г, занимают промежуточное положение ?» между двигателями параллельного и последовательного возбуждения. Большая принадлежность их к тому или другому виду зависит от соотношения частей основного потока возбуждения, создаваемых параллельной или последовательной обмотками возбуждения. В момент включения двигателя для уменьшения пускового тока в цепь обмотки якоря включается дополнительное сопротивление Rд. Этот двигатель обладает хорошими тяговыми характеристиками и может работать в режиме холостого хода.
Прямое (безреостатаное) включение двигателей постоянного тока всех видов возбуждения допускается мощностью не более одного киловатта.
6. Обозначение машин постоянного тока.
В настоящее время наиболее широкое распространение получили машины постоянного тока общего назначения серии 2П и наиболее новой серии 4П. Кроме этих серий выпускаются двигатели для крановых, экскаваторных, металлургических и других приводов серии Д. Изготавливаются двигатели и специализированных серий [5,6,8].
Двигатели серий 2П и 4Пподразделяются по оси вращения, как это принято для асинхронных двигателей переменного тока серии4А. Машины серии2П имеют 11 габаритов, отличающихся по высоте вращения оси от 90 до 315 мм. Диапазон мощностей машин этой серии составляет от 0,13 до 200 кВт для электрических двигателей и от 0,37 до 180 кВт для генераторов. Двигатели серий 2П и 4П рассчитываются на напряжение 110, 220, 340 и 440 В. Их номинальные частоты вращения составляют 750, 1000, 1500,2200 и 3000 об/мин.
Каждый из 11 габаритов машин серии 2П имеет станины двух Длин ( М и L ).
Электрические машины серии 4П имеют лучшие некоторые технико — экономические показатели по сравнению с серией 2П. 1 рудоемкость изготовления серии 4П по сравнению с 2П снижена в 2,5. 3 раза.’ При этом расход меди снижается на 25. 30 %. По ряду конструктивных особенностей, в том числе по способу охлаждения, по защите от атмосферных воздействий, по использованию отдельных деталей и узлов машины серии 4П унифицированы с асинхронными двигателями серии 4АиАИ [10,11].
Обозначение машин постоянного тока (как генераторов, так и двигателей) представляется следующим образом:
2ПХ1Х2ХЗХ4 ,
где 2П — серия машины постоянного тока;
XI — исполнение по типу защиты: Н — защищенное с самовентиляцией, Ф — защищенное с независимой вентиляцией, Б — закрытое с естественным охлаждением, О — закрытое с обдувом от постороннего вентилятора;
Х2 — высота оси вращения ( двухзначное или трехзначное число) в мм;
ХЗ— условная длина статора: М — первая, L — вторая, Г — с тахогенератором;
Х4 — климатическое исполнение и категория размещения: У — умеренный климат, Т — тропический климат.
В качестве примера можно привести обозначение двигателя 2ПН112МГУ — двигатель постоянного тока серии 2П, защищенного исполнения с самовентиляцией Н,112 высота оси вращения в мм, первый размер статораМ, укомплектован тахогенератором Г, используется для умеренного климатаУ.
По мощностям электрические машины постоянного тока условно могут быть подразделены на следующие группы [12]:
Микромашины ………………………. меньше 100 Вт,
Мелкие машины ………………………от 100 до 1000 Вт,
Машины малой мощности…………..от 1 до 10 кВт,
Машины средней мощности………..от 10 до 100 кВт,
Крупные машины……………………..от 100 до 1000 кВт,
Машины большой мощность……….более 1000 кВт.
По номинальным напряжениям электрические машины подразделяются условно следующим образом:
Низкого напряжения…………….меньше 100 В,
Среднего напряжения ………….от 100 до 1000 В,Высокого напряжения
По частоте вращения машины постоянного тока могут быть представлены как:
Тихоходные…………….менее 250 об/мин.,
Средней скорости………от 250 до 1000 об/мин.,
Быстроходные………….от 1000 до 3000 об/мин.
Сверхбыстроходные…..выше 3000 об/мин.
| | | следующая лекция ==> | |
| Принцип получения ЭДС генераторов постоянного тока. | | | Задание и методика выполнения работы. |
Дата добавления: 2019-04-03 ; просмотров: 1620 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ







