Схема намотки бесколлекторных двигателей
Квадрокоптер за 1 день и $120
Создать квадрокоптер как платформу для летающего робота я планирую уже очень давно. Первые расчеты и заказ деталей я сделал год еще назад. Однако, делать «просто коптер» чтобы полетать, управляя с пультом или даже в FPV режиме конечной задачей не является. Поэтому коптер должен быть максимально гибким и как можно менее дорогим.
По отдельности все детали для коптера есть, но их сопряжение — дело простое только в теории. Нужно быть и программистом и инженером и моделистом — вертолетчиком. Поэтому процесс движется довольно небыстро. А летать хочется 🙂 Ничто так не расхолаживает и не демотивирует как отсутствие видимых результатов, особенно когда прогресс-то вроде есть, но не наглядный. Да и экспериментировать сразу на большом квадракоптере дорого и опасно.
Поэтому я решил собрать для экспериментов миникоптер. Как всегда — задача сделать недорого, просто и гибко.
Мой результат — готовый коптер за 1 день (на сборку и запуск) и $120 (стоимость квадрокоптера включая доставку). А с аппаратурой — $145.

Кому как, а для меня основной преградой в коптеростроении всегда была дороговизна проверенных наборов деталей (kit), которые можно купить в одном месте и поэкспериментировать. Ведь собрав коптер, просто так летать надоест очень быстро, если, конечно, вы не авиамоделист, для которого это лишь еще одна забавная моделька. Самое интересное — добавить коптеру немного (или много, зависит от умений и изобретательности) самостоятельности. Но пока поднимешь коптер в воздух потратишь столько сил, что на самое интересное запал уже начинает угасать. Да и пока отладишь программу управления — разоришься, ведь каждая ошибка — это почти наверняка падение, а самое дешевое падение — это сломанные пропеллеры.
Сейчас покажу, как это преодолеть.
Заказываем детали
На самом деле основной бюджет коптера еще меньше, всего около $100 включая доставку.
Итак, обязательные запчасти:
| Рама с моторами 445 мм | $28,95 |
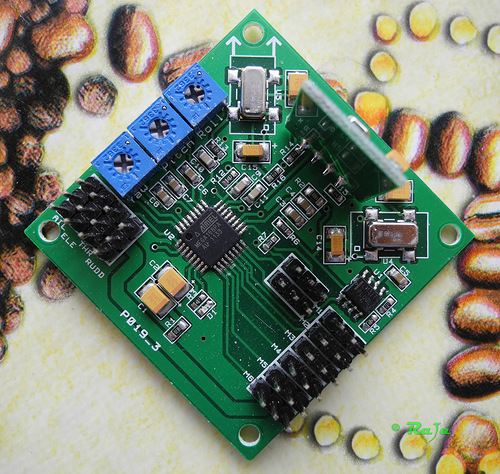
| Плата управления (аналог KKmulticopter, но от HK) | $14,95 |
| ESC (регуляторы хода) | $5,96 х 4 |
| Пропеллеры прямого и обратного вращения | $1,34 + $1,94 |
| Резиновые кольца для крепления пропеллеров | $1,4 |
| Пропсейверы Prop Saver w/ Band 4mm (10pcs) | $3,99 |
| Аккумулятор на 1300мАч | $5,96 |
Вот и весь джентльменский набор.
Но нам понадобится и кое-что дополнительно. Возможно, у вас что-то из этого имеется, поэтому заказывайте то, чего не хватает:
| AVR ISP Программатор для платы управления (подойдет FTBB, USBASP, Arduino… любой) | $4,75 |
| Провода от ресивера к плате управления | $4 |
| Servo extension для подключения ESC — свои провода не достают, берите любые или спаяйте сами — там три проводка | |
| Радиоаппаратура — любая с 4 и более каналами | от $22,99 |
| Разъемы XT60 к батарее | $2.16 |
| Силовой провод или аналогичный медный красного и черного цветов (+ -) | $1,29 |
Радиоаппаратура у меня Turnigy 9x, которую я доработал для использования с LiIon аккумулятором и впаял разъем для обновления прошивки аппаратуры (я пользуюсь прошивкой er9x), но ее сейчас очень долго ждать из-за ее популярности, поэтому и не стал ее рекомендовать. Вообще, берите любую, какая есть в наличии и которая вам нравится с количеством каналов от 4. У меня Mode2 (ручка газа слева), но это не принципиально. Если возьмете 6-канальную Hobby King 2.4Ghz 6Ch Tx & Rx V2, не забудьте к ней шнурок для программирования, т.к. на ней самой никаких настроек не сделать, даже реверсировать каналы. Настраивается только с ПК.
Я покупал на HobbyKing только потому, что абсолютно все, что нам понадобится можно заказать там, но вы можете брать на rctimer.com или в любом другом месте. Если будете брать на HK, заказывайте сразу внизу нужные combo детали — так будет дешевле, чем набирать их по отдельности.
ЗИП:
Нам понадобятся еще винтики М2х10 или М3х10 (их проще достать в магазине, но придется чуть-чуть рассверлить отверстия в креплении моторов, это несложно).
Аккумуляторов берите по возможности хотя бы пару. Если нет зарядки для LiPo аккумуляторов, тоже
берите, это разовое вложение, пригодится.
Пропеллеров берите побольше. Не смотрите, что их по 5 штук в пакете. Я в первый день сломал 4 штуки, пока настраивал и обнаружил глюк в прошивке. 🙂 Это расходный материал, особенно в тесной комнате как у меня.
Запасные моторы тоже, наверное не помешают, но это позднее, сразу вы их вряд ли сломаете.
Понадобится также паяльник, немного припоя и флюса, термоусадочная трубка диаметром 2 и 5 мм или изолента, резинка для денег или от трусов для крепления аккумулятора 🙂
Как только определились что у нас есть, а что заказываем и в каком количестве, заказываем и спокойно ждем недельки три (ну это как повезет с почтой).
Собираем наш квадрик
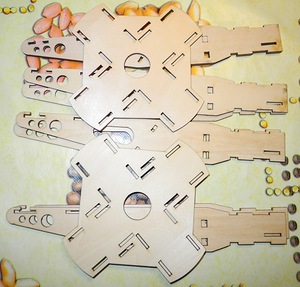
Боковинки каждого луча склеиваем с помощью ПВА-М или суперклея (ПВА-М дает прочные эластичные швы, но собирать раму лучше вечерком, чтобы до утра оставить клей высохнуть как следует). Собираем все лучи и приклеиваем к нижней центральной пластине. Верхнюю пока отложите в сторону. Ножки лучей склеиваются из двух одинаковых половинок. Поскольку в луче всего 5 деталей (2 стенки и три распорки :), думаю, что сложности в сборке не составит.
Откладываем раму сохнуть до утра. А с утра достаем паяльник, термоусадку, провода и садимся паять.
Сначала продеваем провода всех 4х ESC в лучи вот таким макаром:

Затем берем толстый провод, отрезаем по 2 куска красного и черного цветов длиной сантиметров по 5-7. Зачищаем с концов по 5 мм и в середине примерно 5-7 мм. Куски спаиваем зачищенными серединами крест-накрест. Получится два креста — черного и красного цветов. Концы пока просто залудить.
Затем к красному перекрестию припаиваем красные концы от всех четырех ESC, не забыв надеть кусочки термоусадочной трубки по 1.5-2 см. То же самое проделываем с черной крестовиной. Размещаем все это в центре квадрокоптера.
Отрезаем еще по 1 куску толстого провода и припаиваем их к перекрестьям, концы выводим в отверстие в днище коптера, а место спайки изолируем:

Проверьте все внимательно, чтобы не было непропаев и коротких замыканий. Припоя не жалейте, токи тут очень серьезные текут, поэтому площадь контакта нужна побольше.
Если все в порядке, можно смазать ПВА-М верхнюю крестовину коптера и приклеить ее, спрятав таким образом все силовые провода внутри. На хвостик из просунутых в отверстие днища проводов надеваем термоусадку и припаиваем коннектор XT60 в соответствии с обозначенной на нем полярностью (красный провод к +).
Теперь крепим моторы к раме парой винтов М3х10, подложив с обратной стороны шайбу. Просовывем в отверстие в раме провода от мотора, припаиваем их к ESC. Перед пайкой наденьте термоусадочные кембрики, но пока не усаживайте их, после проверки может понадобиться сменить направление вращения мотора, для этого нужно поменять местами любые два провода.
Выглядит в готовом виде это примерно так:

Ну вот, теперь можно проверить и настроить ESC и моторы.
Не надевая пропеллеры, подключаем к ресиверу в 3й канал — это Throttle в стандартной 4х канальной схеме (или серво-тестеру, если имеется), затем включаем передатчик (предварительно нужно связать их- bind, эта операция описана в инструкции). Подключаем аккумулятор к коннектору XT60. После писка от ESC плавно даем газ и проверяем, что мотор с ESC в порядке.
Повторяем процедуру для остальных моторов. Я бы заодно порекомендовал настроить тип батареи и скалибровать газ, но это можно и потом.
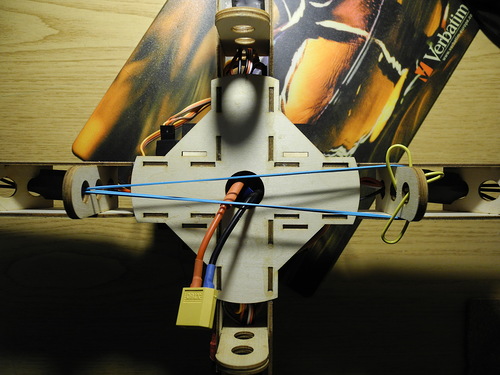
Проверяя моторы, обратите внимание на направление вращения. Нам нужно, чтобы два мотора напротив друг друга вращались в одну сторону, а соседние — в разные:

Поменять направление вращения мотора, напоминаю, можно поменяв местами любые 2 из трех проводов, которые идут к ESC. Можно сразу пронумеровать моторы по схеме соответственно направлению вращения и подписать карандашом на лучах.
Все вращается правильно и реагирует на ручку газа передатчика правильно? Замечательно, переходим к плате управления.
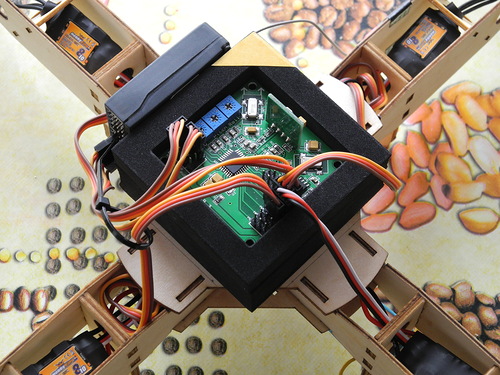
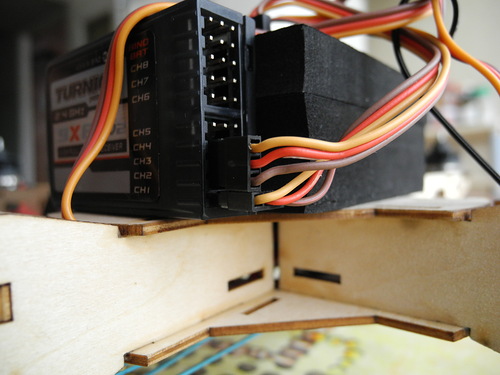
Она поставляется в мягком корпусе из пеноматериала. аккуратно ее извлекаем, переворачиваем и вставляем обратно, а мягкий корпус на двусторонний скотч или клей крепим на раму так, как указано на картинке выше, чтобы стрелка смотрела между лучами, на которых установленым моторы 1 и 2.
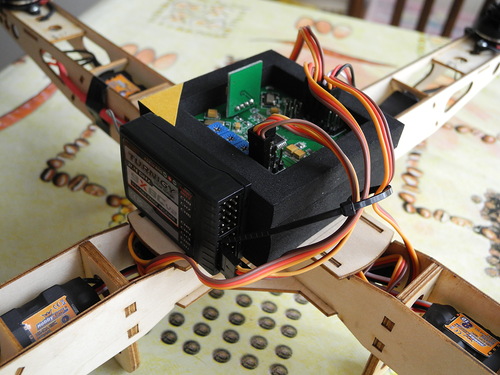
Сбоку к нему клеим на двусторонний скотч ресивер радиоаппаратуры (антенну крепим к одному из лучей):
Я наклеил стрелку на корпус, чтобы было легче ориентироваться на земле где у коптера перед.
Теперь подключаем мозги — скорее всего 2-3 из 4 ESC не достанут до платы управления, тут то и пригодятся servo extension кабели. Но их можно сделать самим. Нужна 3пиновая вилка из обычный PLS гребенки с шагом 2.54 ммм и половинка кабеля для соединения ресивера и платы управления (нам нужен Female коннектор).
Подключаем моторы соответственно нумерации в разъемы M1-М4
Сигнальный провод к центру платы, землю к краю (на предыдущей фото все видно).
Теперь подключаем ресивер. По умолчанию 4-х канальная настройка такая:
1 — Aileron (элероны, ROLL)
2 — Elevator (тангаж, PITCH)
3 — Throttle (газ)
4 — Rudder (руль направления, рыскание, YAW)
Вот и подключаем по порядку каналы к плате, на ней подписано соответственно AIL, ELE, THR, RUDD.
Только не 4 проводами, а проще: первый подключаем как положено — черный провод (земля) к краю платы, сигнальный внутрь, а остальные три канала подключаем одним проводом, нас интересует только сигнальный провод:
Все, осталось прикрепить батарею и коптер собран. Тут и настал черед резинки 🙂
Батарею при взвешивании просто положил сверху.

Осталось прошить плату управления и настроить коптер.
Для прошивки используем AVR ISP программатор. Подключение такое:
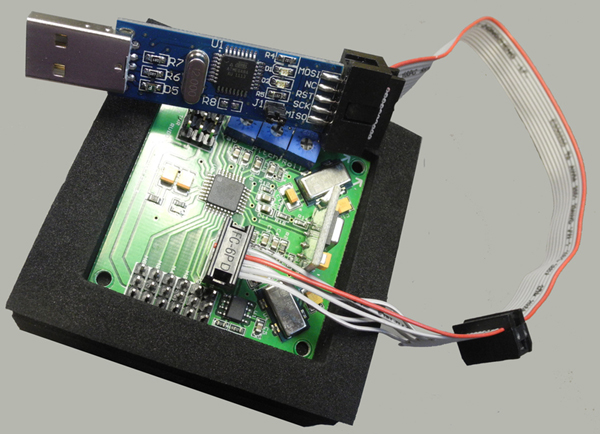
Т.к. плата является клоном Kaptein Kuk quadrokopter, можно воспользоваться их софтинкой (KKmulticopter Flash) для прошивки.
У меня стабильно заработала прошивка XXcontrol_KR_XCopter v2.5. Ее можно прошить с помощью avrdude:
avrdude -c usbasp -p m168p -U flash:w:XXcontrol_KR_XCopter_v2_5.hex:a
или выбрать в программульке для прошивки, она скачает сама.
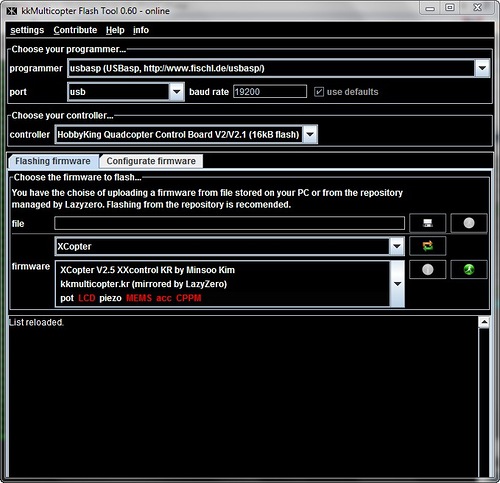
v4.7 от Kaptein Kuk у меня заработала некорректно, поэтому не советую ее.

Отключаем от программатора, выполняем настройку по инструкции (пункты 1, 2, 4 и 8, остальное по желанию).
Все, полетели 🙂
Взлетать советую медленно и очень осторожно. Сначала поставьте коптер стрелкой от себя, нужно попробовать приподнять коптер газом, если наклоняется или вращается, триммируем его, чтобы он взлетал без перекоса (попробуйте покачать аккуратно стиками элеронов и тангажа, буквально касаясь их, пока он еще на земле, чтобы убедиться, что все каналы работают правильно, если нет, инвертируйте нужные, у меня это был канал Elevator). Затем если он покачивается стиками правильно, чуть-чуть добавьте газа, чтобы взлетел на пару сантиметров, и опускайте обратно. Ну и дальше учимся летать 🙂 (Я пока определил что к чему, сломал 2 пропеллера об стену — глюк прошивки v4.7, а потом еще в процессе настройки коэффициентов усиления гироскопов сломал еще пару — коптер раскачивался и задел диван, дома тесно, поэтому дома больше не летаю). Если не уверены или страшно — наденьте защитные очки и оденьтесь, пропеллеры бьют ощутимо, мне не попадало по рукам, но они острые и вращаются очень быстро!
Как освоите эту платформу, можно ставить свой контроллер или писать свою прошивку, добавлять акселерометры, барометр, компас, сонар, GPS, телеметрию, LPS лазер и делать из платформы робота. Но сначала получаем удовольствие, от винта, мы взлетели!
Удачных вам полетов!
kinshas
Перемотка бесколлекторного мотора.

Для намотки эл. моторов используется медный эмалированный провод.
ПЭВ-2
ПЭТ-155 (температурный индекс 155℃)
ПЭТ-180 (т. и. 180℃)
Они имеют очень прочное покрытие из модифицированного полиэфира и выдерживают шоковый нагрев провода без повреждения изоляции за 200℃.
Такие провода имеют темно-вишневый цвет лака.
Ток и толщина провода:
1А — 0.05мм, 3А -0.11мм, 10А-0.25мм, 15А-0.33мм, 20А-0.4мм, 30А-0.52мм, 40А-0.63мм, 50А-0.73мм, 60А-0.89мм,70А-0.92мм, 80А-1.00мм, 90А-1.08мм, 100А -1.16мм
Можно мотать тонким проводом в несколько жил.
Преимущества и недостатки:
1 — Тонкий провод легче наматывать.
2 — Тонкий провод лучше заполняет зубы, тут можно поспорить, из моей практики, мотал одной жилой более толстого сечения чем до этого был намотан мотор при максимальном заполнении зубов в обоих случаях.
Мне кажется в тонком проводе очень много сечения уходит на лак, в то время как у толстой жилы только одна проблема с заполняемостью, она не заполняет хорошо углы.
3 — Тонкий провод в основном сгорает от перегрева внутренних обмоток, отсутствует достаточный обдув.
4 — Вентиляция толстого провода лучше из-за небольшого количества слоев, 1-2 не больше в основном.
Для получения максимального КПД мотора, необходимо стремиться получить как можно меньшее сопротивление обмоток. Чем меньше сопротивление, тем меньше потери в обмотке и тем выше эффективность мотора. Для достижения этой цели необходимо использовать как можно более толстый провод.
Слишком тонкий провод дает большое сопротивление, и вы не сможете пропустить нужный ток через двигатель. Если просто поднять напряжение, по закону Ома произойдет увеличение тока. Но потери в обмотках(нагрев) сильно возрастут , что приведет к разрушению двигателя.
Для модельных двигателей обычно используется провод диаметром 0.3-0.6 мм, Скопион сейчас мотают проводом 0.35 в несколько жил.
Расчет сопротивления обмотки двигателя я изложил в в другой теме.
Восстанавливаем изоляцию статора.
Перед тем как начать мотать мотор необходимо убедиться, что статор сверху полностью покрыт изоляцией (зеленое покрытие), если нет то восстанавливаем изоляцию.
1. Смола UHU PLUS 300 с порошковым наполнителем, типа окиси цинка.
2 Хаммерайт зеленый, краска ,очень хорошо, но очень долго сохнет.
3. Если повреждения небольшие то густой циакрин 2 — 3 слоя. (Очень плохо держится на металле, не рекомендую.)
4. На голое железо, зашкурив клею стеклотекстолит 0.3мм а потом по контуру вот такой фрезой не быстрей чем на 10000об, (выше часто ломаются)машинкой типа проксон-дремель, вручную по контуру.
hivolt
Намотка мотора
1. Не отрезать провод от катушки если мотаете одной жилой, это сэкономит провод.
2. Закрепить статор в какое нибудь приспособление, а затем, используя обе руки, наматывать витки с нужным усилием, чтобы обмотки получались более компактными.
3. Не использовать металлический инструмент для заправки или уплотнения провода, использовать только дерево или пластик. Хорошо подходят пластиковые карты.
4. Выточить из дерева оправку для выравнивания провода между зубами.
Подобные оправки можно делать по ходу намотки мотора.
5. Чтобы узнать длину провода для одной фазы, необходимо намотать тонким проводом или ниткой необходимое количество витков на один зуб, далее разматываем и измеряем длину, дальше умножаем на количество зубов, это и будет длина провода одной фазы.
Схема намотки статора с 9 зубами
Где 1-2-3 начало а 5-6-4 концы. Те применительно к картинке снизу С(начало) будет -1 и далее ведем счет справо на лево до 6го вывода, по такому порядку и соединяем провода.
Основная схема намотки приведена на картинке ниже. 
Как можно объяснить этот эскиз в текстовом формате?
Существует простая форма записи для обозначения намотки:
Обычно статор мотается 3 проводами. Назовем их ‘A’, ‘B’ и ‘С’. Если смотреть на статор сбоку, то намотка провода по часовой стрелке будет обозначена заглавной буквой, а намотка против часовой стрелки — маленькой.
Таким образом,на схеме намотки 9ти полюсного мотора мы должны мотать все зубья в одном направлении, один за другим что видно в текстовой схеме «ABCABCABC». Девять букв, по одной букве для каждого зуба.
Итак берем провод, оставляем около 10 см, и мотаем первый зуб по часовой стрелке. Затем перекидываем провод на 4й зуб и мотаем его. И в заключение мотаем 7й зуб. Потом вторым проводом мотаем зубья 2, 5 и 8. И в завершение третьим проводом мотаем 3, 6 и 9 зубья.
Переход с зуба на зуб изолировать термоусадкой. Итак, у нас есть намотанный статор и из него торчит 6 проводов. Три провода из них — это начала обмоток, и 3 другие концы. Необходимо заранее маркировать провода.
Есть 6 концов, но только 3 из них подключаются к контроллеру скорости. Теперь, чтобы завершить перемотку необходимо выбрать схему подключения (базируясь на желаемом предназначении мотора).
Существует две конфигурации которыми можно соединить выводы статора:
Первая называется Звезда (Star или ‘Y’), а вторая — Треугольник (Delta). 

Каждая конфигурация предлагает немного разные свойства и влияет на мощность мотора. Однако, изготовители двигателей еще не решили, какая схема является лучшим вариантом.
Диаграммы ниже показывают электрические схемы для этих соединений. 

После этих картинок, сразу понятно почему эти схемы так называются.
Как правило, соединение «Треугольник» выбирается, если вы хотите получить высоко оборотистый мотор и соединение «Звездой» используется для получения более низких оборотов двигателя и позволяет использовать большие винты.
Если рассмотреть соединение Треугольником и подать напряжение на два вывода, во всех обмотках потечет ток. Для демонстрации того как ток распределиться между обмотками, предположим, что сопротивление одной фазы равно 1 Ом. В этом случае, у нас есть фаза А в 1 Ом, соединенная в паралель с 2мя другими фазами B и С (B и С соединены последовательно) сопротивлением в 2 Ома. По закону Ома можно подсчитать, что 2/3 всего тока пойдут через фазу А и оставшаяся 1/3 пойдет через фазы B и C. Результирующее сопротивление которое увидит контроллер будет 0,66 Ом.
Если мы соединим выводы по схеме Звезда, то весь ток будет всегда идти через 2 фазы в любой момент времени.
Результирующее сопротивление для регулятора будет 2 Ома.
Если мы нагрузим мотор напряжением в 10В, то получим ток около 15А при соединении Треугольником и всего лишь 5А при соединении Звездой. Надо сказать, что соединение треугольником в данном случае дает большую мощность. Так-же, мы получим большие токи, но усилие для поворачивания большого винта может оказаться недостаточным. Можно подать на мотор большее напряжение и все же заставить этот винт крутиться, но возможно, что мотор от этого опять сгорит.
Обороты и напряжение (об/В)
От того как вы намотаете мотор будет зависеть с какими оборотами он будет крутиться и какую батарею вам придется использовать для получения нужной тяги.
Если взять мотор без винта и дать полный газ на, скажем, 6В, мотор будет крутить на своих максимальных оборотах.
Если измерить эти обороты и поделить их на напряжение батареи, мы получим характеристику называемую Обороты на Вольт (RPM per Volt). После того как мы узнали эту характеристику мы уже сможем сказать, как быстро мотор будет крутить на нужном нам напряжении.
Например, наш мотор крутит 8000 Оборотов на 6В.
8000 / 6 = 1333 Об/в
В этом случае с батареей на 10В мотор будет выдавать 13330 Оборотов.
Эта характеристика помогает нам понять на что способен наш мотор, и подходит ли он для поставленной задачи.
Если нам нужен мотор для импеллера, тогда необходимо чтобы мотор имел более высокие Об/В.
Для 3D самолетов, необходимо вращать больший винт, и поэтому обычно используют моторы с более низким Об/В.
Под нагрузкой количество оборотов естественно упадет.
Возвращаясь назад к схемам Треугольника и Звезды. Имеется зависимость между этими двумя схемами и расчетом характеристики Об/В. Если вы соединили мотор звездой и измерили его обороты, вы можете подсчитать какие Об/В получатся при использовании схемы Треугольник и наоборот.
Для перевода от Звезды к Треугольнику надо домножить Об/В на 1.73
Для перевода от Треугольника к Звезде — домножить на 0.578
Таким образом, у нас появляется реальный инструмент для изменения характеристик мотора в зависимости от простой схемы подключения. Некоторые моделисты, зашли так далеко, что подключают все 6 проводов к небольшому блоку коммутации, что позволяет им менять схему в любое время.
Итак, как определить/рассчитать необходимое количество витков и оборотов/В перед намоткой двигателя?
Существуют специальные программы для расчета количества витков при определенных размерах статора и толщины зубов для получения нужного количества оборотов. Но в большинстве случаев, мы просто наматываем максимально возможное количество витков и измеряем параметры получившегося мотора. Используя полученные данные, уже можно понять устраивает нас такое положение дел или нет, и что делать для достижения цели. Метод «тыка» тоже работает достаточно хорошо.
Выводы:
В качестве инструкции можно привести несколько утверждений:
Чем больше витков намотано на зуб, тем большее магнитное поле будет получено на том-же токе.
Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов на вольт.
Для получения высоких Об/В, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение.
Соединение Звездой дает больший крутящий момент и меньшее количество Об/В чем соединение Треугольником.
Часть 2. Схемы намотки бесколлекторных двигателей
Можно воспользоваться вот этим калькулятором.
Пояснения к данной таблице:
(A) — мотать по часовой стрелке
(a) — мотать против часовой стрелки
(-) — оставить зуб пустым (Для LRK схем)
Цвета:
черный — не работает
оранжевый -работает, но не очень хорошо
белый — работает
голубой — работает хорошо
Автор описывает 16 способов намотать одно и тоже на 4 зуба. Во всех случаях зубья намотаны по следующей схеме:
Зуб 1 = «A»
Зуб 2 = «a» (схема намотки противоположна зубу 1)
Зуб 7 = «a»
Зуб 8 = «A»
Пример нескольких схем намотки(Начала(Anf) и концы(Ende) обмоток отмечены):  Простая намотка по методом 1278cw.
Простая намотка по методом 1278cw.
Схема: AabBCcaABbcC
Данная намотка предназначена для соединения звездой.
Причем надо соединять вместе надо либо 3 «начала», либо 3 «конца». 
Почти то же самое, но только почти!
Все три обмоточных провода, намотаны одним методом.
Схема: AaBbCcaAbBcC
На самом деле, намотано НЕПРАВИЛЬНО!
С хорошим контроллером, возможно, и будет работать. Однако, будет очень высокий ток нагрузки и очень плохая эффективность.  Схема, почти та же. Что изменилось?
Схема, почти та же. Что изменилось?
Начало и конец «B» (синей) фазы были просто поменяны местами.
Получили схему: AabBCcaABbcC
Изменения минимальны, но двигатель будет работать очень хорошо.  В такой схеме концы и начала обмоток чередуются.
В такой схеме концы и начала обмоток чередуются.
Конец «A» следует за началом «B»,
конец «B» следует за началом «C» и
конец «C» следует за началом «A».
В таких условиях, лучше использовать соединение треугольником. Я использую именно эту схему намотки. 
Часто встречается следующая схема намотки.
Она часто рекомендуется, как схема для соединения треугольником. 
Это лучший (но я предпочитаю верхний) вариант для намотки 10 или 14P 12N моторов.
При таком варианте провода наилучшим образом подходят для соединения треугольником.
Намотка многополюсного мотора в конфигурации 24 зуба / 26 магнитов: 
Часть 3. Использованием схемы LRK
LRK мотор был разработан тремя джентельменами по имени Lucas, Retzback and Kuhfuss. Целью их разработки была попытка получить максимально возможное силовое поле с определенным видом статора и типов манитов. Чем сильнее поле, тем большее крутящий момент можно получить. Количество об.в при этом уменьшается. Это не значит, что LRK моторы не могут выдавать высоких оборотов. Они вполне могут выдавать высокие обороты, которые позволяет выдать ваш контроллер скорости.
Для постройки LRK мотора, нам необходим статор с 12ю зубьями. Нельзя использовать статоры с 9ю зубьями. Следующее важное отличие — это схема намотки. Только половина всех зубов наматывается. Это делает намотку двигателя более простой по 2м причинам. Во-первых, надо мотать меньше зубов. И второе — пропущенные зубья позволяют намотать больше витков на зубья которые мы мотаем. В некоторых случаях это сильно помогает.
Итак, рассмотрим схему намотки двигателя LRK: 


Данная схема достаточно проста. Мотаем первый зуб против часовой стрелки, затем переходим к зубу 7 и мотаем в обратном направлении, и так 3 раза. C точки зрения электроники — не важно какие метки стоят на ваших выводах. В данном случае все выводы идентичны друг другу. Поэтому можно смело мотать и не бояться запутаться в будущем.
Определяем KV мотора без тахометра.
Тестером на конденсаторе подключив между любых двух фаз конденсатор 0.1-0-0.22 мкФ и сопротивление 1-5ком последовательно. В режиме измерения частоты. Результат в гц разделить на 7 (кол-во пар полюсов) и умножить на 60 сек. Получите об/мин. Далее делите на напряжение -получаете кв. Естественно на холостых.
hivolt
Все расчеты параметров мотора здесь-Расчет основных параметров бесколлекторного мотора.
Обновлено 09.12.2017 в 17:27 [ARG:5 UNDEFINED]







